original en su formación como profesional.
OBJETIVOS
Hacer uso de los comandos de Matlab y simulink como una herramienta capaz de usarse para la simulación de sistemas.
Establecer la relación entre un sistema físico y su representación matemática mediante ecuaciones diferenciales lineales de coeficientes constantes.
Obtener y simular la respuesta del sistema a diferentes entradas y condiciones iniciales.
Determinar las propiedades de los sistemas descritos por ecuaciones diferenciales lineales con coeficientes constantes.
REFERENCIAS
Andrew Knight Basics of MATLAB and Beyond. Chapman and Hall/CRC; 1 edition, 1999. Hanselman, D.; Littlefield, B. MATLAB 5: Versão do Estudante, Guia do Usuário, Makron
Books, 1999.
White Robert: Computational Mathematics: Models, Methods, and Analysis with MATLAB and MPI. Chapman and Hall/CRC; 1 edition, 2003.
http://www.mathworks.com
ACTIVIDAD PREVIA - MARCO TEORICO
1. SIMULINK
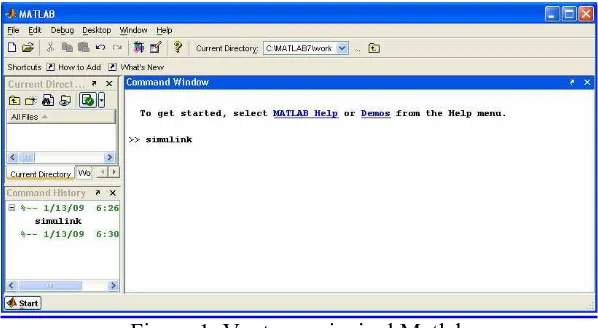
El simulink es un toolbox de Matlab que permite simular sistemas de control por medio de
diagramas de bloque. Para iniciar el simulink, entramos a Matlab, y en el espacio de trabajo de
[image:1.595.148.447.611.775.2]Matlab se teclea simulink, como se muestra en la siguiente pantalla
Al dar un Enter () al comando de la pantalla anterior se abre la ventana Simulink Library Browser
y se nos muestra las bibliotecas que contiene, y que son:
Simulink
Aerospace Blockset
CDMA Reference Blockset
Communications Blockset
Constrol System Toolbox…Etc.
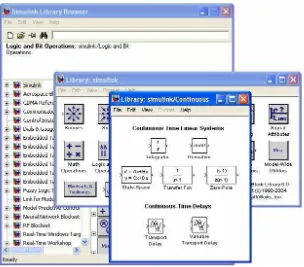
[image:2.595.186.409.227.476.2]Como se ve en la siguiente pantalla:
Figura 2. Menu de toolbox para simulink
La presentación de las bibliotecas podría cambiar dependiendo de las que se hayan instalado en cada computadora. La figura también nos muestra en la parte superior, cuatro iconos: para crear un nuevo espacio de trabajo, para abrir un modelo ya existente, para fijar la pantalla de bibliotecas de forma que siempre permanezca visible y por último, el icono para búsqueda de bibliotecas.
Cada una de las bibliotecas de simulink contiene un cierto número de bloques. Hay dos formas de
accesar a los bloques componentes de cada biblioteca, oprimiendo sobre el signo “+” de la
biblioteca de simulink, por ejemplo.
Cada bloque de la biblioteca contiene un subconjunto de bloques que son usados para formar la simulación deseada. Al hacer doble clic sobre cualquiera de ellos se nos muestran los componentes
Figura 3. Herramientas para analisis de sistema lineales continuos
Llevaremos a cabo una simulación simple para efecto de aplicar un poco de lo que se ha visto, para
ello, abrimos el menú File, New y seleccionamos Model, para crear la ventana (Work Space de
Simulink) donde efectuaremos una simulación. También se puede abrir esta ventana dando un doble
click sobre el primer icono de la parte superior izquierda de la ventana Simulink Library Browser.
Cierre la ventana de Continuous, y en la biblioteca de simulink haga doble clic sobre Sources para
tener accesibles sus componentes, arrastre con el ratón el componente de Sine Wave (Señal
senoidal) a la ventana de trabajo de Simulink. Puede, si así lo desea, cerrar la ventana
correspondiente a componentes de Sources, y posteriormente abrir la de Sinks, para arrastrar el
[image:3.595.147.451.54.321.2]componente Scope (Osciloscopio) hacia la misma ventana, hasta ahora se tiene lo siguiente
Figura 4. Untitled basico
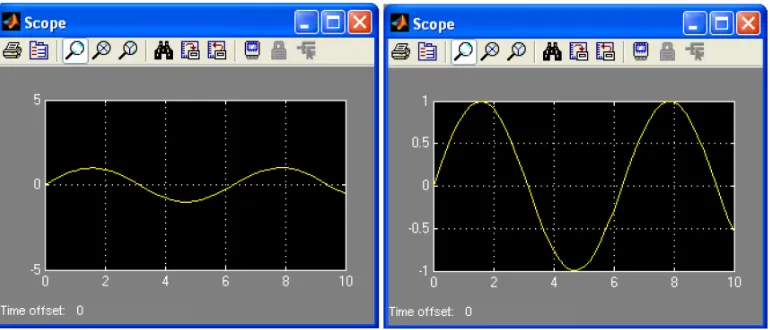
Una vez conectados, como en la ventana anterior, haga doble clic sobre el Scope para abrir la
Figura 5. Señales obtenidas en el osciloscopio virtual del simulink
Para cambiar las características de la onda senoidal, haga doble clic sobre el componente de Sine Wave (Señal Senoidal) sobre la ventana de trabajo, pueden realizarse cambios en la frecuencia, amplitud, fase etc.
Use y observe los iconos del osciloscopio para aumentar y disminuir el tamaño de la gráfica, cambiar los ajustes del osciloscopio, imprimir y mantener los ejes.
Ejemplo: Solución de ecuaciones diferenciales a través de Simulink
El simulink puede ser usado para modelar ecuaciones diferenciales.
Se desea modelar la siguiente ecuación diferencial
la señal u es como se muestra.
Lo primero es despejar la derivada de mayor orden
Ejemplo: Resolver la siguiente ecuación diferencial
Diagrama Simulink
Ejemplo: modelar un motor DC
Un actuador común en sistemas de control es el motor DC. Provee directamente movimiento rotatorio y acoplado con poleas o correas puede proveer movimiento transnacional.
Ecuaciones dinámicas
El circuito eléctrico de la armadura y el diagrama de cuerpo libre del rotor es mostrado en la figura con sus ecuaciones dinámicas.
(1)Leyes de Newton
(2) Leyes de Kirchhoffs
Los parámetros físicos tienen los siguiente valores :
2. LA VERSATIBILIDAD DEL COMANDO ODE45 EN EL MATLAB
La aplicabilidad abierta del comando ode45 atraves del matlab, permite solucionar cualquier
ecuación diferencial que representa el modelo dinamico para nuestro estudio sistemas hidráulicos
como también para otros tipos de sistemas. Bajo su configuración, el comando ode45 requiere
cuatro argumentos. El primer argumento es el nombre de la función, definida en el MATLAB, que retorna el valor de la ecuación diferencial y’ = g(x,y) cuando es fornecido valor para x e y. El segundo y el tercer argumentos representan los limites en el intervalo en el cual deseamos calcular el valor de la función y = f(x). El cuarto argumento contiene la condición inicial necesaria para determinar la única solución para la ecuación diferencial ordinaria. Se asume que ese argumento
representa el valor de la función dentro del intervalo considerado. El comando ode45 posee dos
salidas: un conjunto de coordenadas x e, un conjunto de coordenadas y correspondientes, los cuales representan los puntos de la función y = f(x).
En muchas actividades productivas es necesaria la presencia de tanques para almacenar líquidos como se muestra en la figura 6. Las aplicaciones resultan muy diversas. Por ejemplo el proceso de tratamiento de grandes cantidades de aguas servidas previo a su descarga en el mar, ríos o lagos, requiere de tanques como elemento principal para su funcionamiento.
[image:8.595.181.417.208.367.2]Dependiendo de la aplicación que se desea dar al tanque, muchas veces es necesaria el control del nivel del fluido almacenado a una altura constante la mayor parte del tiempo, a pesar de la existencia de flujos de entrada y salida permanentes. Así se evitan rebalses o la descarga total del tanque mientras se renueva el contenido de éste a medida que transcurre el tiempo.
Figura 6. Planta de tanques de calentamiento de líquidos.
A continuación se presenta un ejemplo práctico de un tanque de calentamiento de área
transversal A, representado en el siguiente diagrama:
A seguir son presentadas de forma resumida las etapas en la formulación del modelo de este proceso térmico e hidráulico.
Algunas condiciones simplificadoras: densidad del agua constante, Calor específico constante, variaciones de energía cinética y potencial despreciables.
Balance de Energía:
[ ]
i i i
d E V
F H F H Q dt
Como las variaciones de energía potencial y cinética son despreciables, entonces por definición:
( ) ( )
p ref p ref
H VC TT AhC TT
( )
( ) ( )
p ref
i i p i ref p ref
d C T T hA
F C T T F C T T Q
dt ( ) ( ) ( )
p ref i i p i ref p ref
dh dT
AC T T h F C T T F C T T Q
dt dt
( ref) i ref( i ) i( i ref) ( ref) p
F F dT Q
A T T T F F hA F T T F T T
A dt C
( ) i i p dT Q
hA F T T
dt C
En resumen, el modelo está formado por dos ecuaciones principales:
i
dh
A F F
dt i
dV
F F dt
( )
i i
p
dT Q
hA F T T
dt C i( i ) p
dT Q
hA F T T
Donde h y T son las variables del sistema. Como variables de entrada se tiene: Ti, Fi,y F. Los
parámetros constantes físicos del modelo son: área (A), densidad liquido (ρ), Calor especifico (C p)
Creamos una función dtdh.m para ser llamada por el programa principal
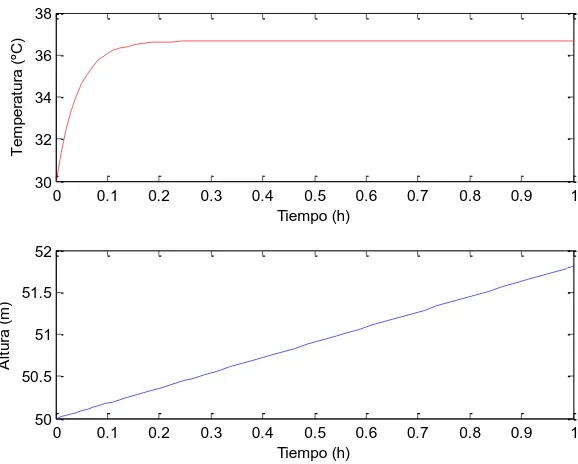
Respuesta a la simulación del sistema:
function dTH=dtdh(t,x)
global U A V ro Cp Fi Ti F Th tfin
dTH = zeros(1,2); dh=(Fi-F)/A;
dT=(Fi*(Ti-x(1))+U*A*(Th-x(1))/ro/Cp)/x(2); dTH=[dT dh]';
%PROGRAMA PRINCIPAL PARA MODELAR UN TANQUE DE CALENTAMIENTO
clear all clc
global U A V ro Cp Fi Ti F Th tfin
%parametros del modelo (en el sistema Inglês de unidades): U=150;
A=200; ro=50; Cp=0.75;
%variables de entrada: Fi=400; %[g/h]
F=38; %[g/h] Th=40; %[ºC] Ti=30; %[ºC]
%condiciones iniciales: T=30;
V=50; x0=[T V];
%intervalo de integración: tin=0;
tfin=1;
tspan=[tin tfin]; %comando ODE45:
[t,x] = ode45 (@dtdh, tspan, x0);
%gráficos:
subplot(2,1,1), plot(t,x(:,1),'r') xlabel('Tiempo (h)')
ylabel('Temperatura (ºC)')
subplot(2,1,2), plot(t,x(:,2),'b') xlabel('Tiempo (h)')
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 50
50.5 51 51.5
Tiempo (h)
A
lt
u
ra
(
m
)
ACTIVIDADES A REALIZAR EN EL LABORATORIO
[image:11.595.153.442.69.301.2]En el circuito de la Figura 7 se muestran dos filtros pasivos para un sistema de audio. El filtro de la Figura 7a está compuesto por una bobina L2, un condensador C2 y el parlante; por otra parte, el de la Figura 7b se implementa con un condensador C3, dos bobinas L2 y L3 y el parlante. El parlante se comporta como una resistencia R2.
[image:11.595.104.498.450.551.2]
Figura 7a Figura 7b
Como actividad a desarrollar en el laboratorio, usted debe:
a. Determinar las ecuaciones diferenciales (modelo matemático) que describen la relación entre las
señales de salida y entrada de los dos circuitos si se considera como señal de salida la tensión en cada uno de los parlantes.
b. Teniendo en cuenta que el valor de los elementos para el filtro de la Figura 7a son: L2=6mH,
C2=46,875 µF, y R2=8Ω y los del filtro de la Figura 7b: L2=6,37 mH, L3=2,12 mH y C3=88,417
µF y R3=8Ω. (Favor obtener valores aproximados a los elementos del circuito). Obtener la
respuesta de los dos sistemas del ítem anterior aplicando Simulink para el sistema de la figura 7a y el comando ode45 para el sistema de la figura 7b, considerando condiciones de reposo inicial
nulas, para una señal onda cuadrada de 0,5 Vpico con offset de 0,5 Vdc (esta señal emula un
EJERCICIOS DE REFUERZO COMO TRABAJO INDEPENDIENTE EXTRACURRICULAR
Ejercicio 1:Resuelva la siguiente ecuación diferencial. Modele el sistema y obtenga la respuesta en el tiempo para una entrada escalón de magnitud 2.
Ejercicio 2: La figura muestra un vaso cerrado, aislado, lleno de un líquido y conteniendo un calentador eléctrico inmerso en el líquido. La resistencia eléctrica del calentador, por su vez, está
colocada dentro de una chaqueta metálica de resistencia térmica RHL. La resistencia térmica del vaso
y su aislamiento es RLa. El calentador tiene una capacitancia térmica CH y el líquido una
capacitancia térmica CL. La temperatura del calentador es ϴH y la del líquido ϴL, la cual es
considerada uniforme debido al mezclador dentro del vaso.
El calentador eléctrico y el líquido están inicialmente a temperatura ambiente ϴA, estando el
calentador desconectado. En el instante t = 0, el calentador es encendido, de modo que el flujo de
calor fornecido al sistema es qi(t). Se pide
i. Modelo matemático cuya salida es la temperatura del líquido ϴL(t) y entrada al modelo es el
calor fornecido qi(t).
ii. Usando el simulink, graficar las temperaturas ϴL(t), ϴH(t) para una entrada tipo escalón de
amplitud 1,5 x 104 W.
iii. A partir del grafico del ítem (ii), encontrar el tiempo que lleva el líquido para alcanzar la
temperatura deseada ϴL(t) = 365K.
CH =20 x 103 J/°K
CL =1 x 106 J/°K
RHL =1 x 10-3 °K/W
RLA =5 x 10-3 °K/W