Evaluación del método activo para determinar contenidos de humedad de suelos
119
0
0
Texto completo
(2) PONTIFICIA UNIVERSIDAD CATOLICA DE CHILE ESCUELA DE INGENIERIA. EVALUACIÓN DEL MÉTODO ACTIVO PARA DETERMINAR CONTENIDOS DE HUMEDAD EN SUELOS. JOSÉ LUIS SERNA FARFÁN. Tesis presentada a la comisión integrada por los profesores: FRANCISCO SUÁREZ POCH JOSÉ FRANCISCO MUÑOZ PARDO EDWIN GUZMÁN CÁCERES GONZALO YAÑEZ CARRIZO. Para completar las exigencias del grado de Magister en Ciencias de la Ingeniería. Santiago de Chile, Octubre, 2015.
(3) Dedicado a toda mi familia, que a pesar de la distancia siempre estuvieron conmigo.. iii.
(4) AGRADECIMIENTOS En primer Lugar quiero agradecer a mi familia, por darme todo su apoyo y quererme por sobre todas las cosas, agradezco a mi padre por el gran ejemplo que es, a mi madre por aconsejarme, amarme, y apoyarme siempre, a mis hermanos por hacerme reír cuando estaba triste. Un agradecimiento especial a mi profesor supervisor, Profesor Francisco Suárez P., por su apoyo incondicional, por guiarme en este trabajo desde el primer día, por sus consejos, pero sobre todo por confiar en mí, por ser un amigo y porque siempre me alentó en seguir adelante. También agradecer al Profesor José F. Muñoz, por su aporte, guía y buena disposición en todo momento del trabajo de investigación. Agradezco también al Programa Nacional de Becas y Crédito Educativo del Perú (PRONABEC), que sin su apoyo económico no hubiera sido posible la realización de este trabajo de investigación. Quiero agradecer también a todo el Departamento de Ingeniería Hidráulica y Ambiental, profesores, alumnos de postgrado y personal administrativo. También agradezco al proyecto Fondecyt N°1130522 por su apoyo económico, y facilitar el desarrollo de este trabajo de investigación. A Dios por brindarme buena salud, y tener las ganas de salir adelante siempre.. iv.
(5) TABLA DE CONTENIDOS Página AGRADECIMIENTOS .......................................................................................... iv TABLA DE CONTENIDOS ................................................................................... v ÍNDICE DE TABLAS ........................................................................................... vii ABSTRACT ......................................................................................................... xiii RESUMEN ............................................................................................................ xv 1. 2. INTRODUCCIÓN .......................................................................................... 1 1.1. Motivación............................................................................................... 1. 1.2. Hipótesis de investigación ..................................................................... 11. 1.3. Objetivos ............................................................................................... 11. 1.4. Estructura de esta tesis........................................................................... 12. TEORÍA ........................................................................................................ 13 2.1. Medición distribuida de temperaturas usando FO-DTS ........................ 13. 2.1.1 Configuraciones típicas de sistemas FO-DTS. .................................. 20 2.1.2 Calibración de sistemas FO-DTS ...................................................... 23 2.2. Medición del contenido de humedad utilizando pulsos de calor ........... 26. 2.2.1 Métodos de sondas individuales y de múltiples sondas..................... 26 2.2.2 Método activo para la determinación de contenidos de humedad ..... 29 3. MATERIALES Y MÉTODOS ..................................................................... 35 3.1. Propiedades del suelo utilizado ............................................................. 35. 3.1.1 Curva granulométrica ........................................................................ 35 v.
(6) 3.1.2 Propiedades hidrodinámicas .............................................................. 35 3.1.3 Propiedades térmicas ......................................................................... 39 3.2. Instalación experimental ........................................................................ 40. 3.2.1 Columna experimental ....................................................................... 40 3.2.2 Sistema de medición FO-DTS de alta resolución espacial ................ 43 3.2.3 Sistema eléctrico que permite generar los pulsos de calor ................ 46 3.3. Experiencias realizadas para evaluar el método activo para la determinación distribuida de humedades .............................................. 49. 3.3.1 Medición y calibración del sistema FO-DTS .................................... 51 3.3.2 Evaluación del método activo ............................................................ 54 4. RESULTADOS Y DISCUSIÓN .................................................................. 59 4.1. Propiedades del suelo utilizado ............................................................. 59. 4.1.1 Curva granulométrica ........................................................................ 59 4.1.2 Propiedades hidrodinámicas .............................................................. 60 4.1.3 Propiedades térmicas ......................................................................... 62 4.2. Experiencias realizadas para evaluar el método activo para la determinación distribuida de humedades .............................................. 63. 4.2.1 Mediciones FO-DTS: exactitud y precisión ...................................... 63 4.2.2 Evaluación del método activo ............................................................ 68 5. CONCLUSIONES ........................................................................................ 94. vi.
(7) ÍNDICE DE TABLAS Tabla 3-1: Resumen general y corriente eléctrica media, I (A), utilizada en cada una de las experiencias. El valor entre paréntesis corresponde al porcentaje de corriente configurado en el sistema eléctrico......................................................................... 50 Tabla 4-1: Parámetros ajustados de la curva de retención de humedad del suelo empleado en este estudio. ....................................................................................... 60 Tabla 4-2: Propiedades térmicas del suelo utilizado en el este estudio en función del contenido de humedad. ........................................................................................... 62 Tabla 4-3: Raíz del error cuadrático medio (RMSE, °C) en las zonas de referencia utilizadas para calibrar las temperaturas FO-DTS. ................................................. 66 Tabla 4-4: Sesgo medio (MB, °C) en las zonas de referencia utilizadas para calibrar las temperaturas FO-DTS............................................................................................. 67 Tabla 4-5: Raíz del error cuadrático medio (RMSE, °C) en la zona de validación. ......... 67 Tabla 4-6: Sesgo medio (MB, °C) en la zona de validación. ........................................... 68 Tabla 4-7: Parámetros de calibración (a y b), y métricas de evaluación (r2 y RMSE) obtenidos en las experiencias con distinta duración del pulso de calor.................. 75 Tabla 4-8: Métricas de evaluación de las mediciones FO-DTS en función del t utilizado para integrar la temperatura acumulada. ................................................................. 79 Tabla 4-9: Parámetros de calibración (a y b), y métricas de evaluación (r2 y RMSE) de las curvas DS20 con t = 5, 10, 15, 30, 60 y 150 s. .............................................. 80 Tabla 4-10: r2 y RMSE del ajuste de las curvas DS20 en función de t0. ......................... 84 Tabla 4-11: r2 y RMSE obtenidos del ajuste de las curvas DS en función del porcentaje de corriente aplicado al cable de fibra óptica. ........................................................ 87 Tabla 4-12: RMSE e intensidad de corriente en las experiencias de validación del método activo. ..................................................................................................................... 93. vii.
(8) ÍNDICE DE FIGURAS Figura 1-1: Determinación del contenido de humedad volumétrico de un suelo usando el método pasivo (Steele-Dunne et al., 2010; Suárez, 2013) ........................................ 7 Figura 1-2: (a) Determinación de la difusividad térmica (D) del suelo en una ubicación del cable de fibra óptica. (b) Saturación relativa media observada mediante sensores ECH2O e inferidos a partir de las estimaciones de la difusividad térmica (Modificado de Steele-Dunne et al., 2010; Suárez, 2013)........................................ 7 Figura 1-3: Temperatura acumulada (Tcum) integrada en 120 s como función del contenido de humedad (). Para cada contenido de humedad, las barras de error corresponden a la desviación estándar de tres repeticiones (Sayde et al., 2010)...... 8 Figura 2-1: Dispersión de la luz dentro de una fibra óptica. ............................................ 14 Figura 2-2: Espectro óptico de la luz en un punto dentro de la fibra donde ocurre dispersión. En FO-DTS, la razón entre las señales Stokes y anti-Stokes de la dispersión Raman se utiliza para determinar la temperatura en el punto de dispersión. ............................................................................................................... 15 Figura 2-3: Interacción entre la luz dispersada y la estructura cristalina de una fibra óptica (Smith y Dent, 2005). .................................................................................. 16 Figura 2-4: Diagrama de un sistema típico de medición distribuida de temperaturas usando cables de fibra óptica (Suárez et al., 2011a). .............................................. 17 Figura 2-5: Tipo de configuraciones típicas en instalaciones experimentales FO-DTS: a) configuración “simplex single-ended”; b) configuración “duplex single-ended”; c) configuración “double-ended”. Modificado de Hausner et al. (2011).................... 21 Figura 2-6: Propiedades térmicas de un suelo en función de la saturación relativa calculadas utilizando los modelos de Johansen (1975) y Campbell (1985), y asumiendo dos valores distintos para el contenido de cuarzo (Q). Modificado de Steele-Dunne et al. (2010). ..................................................................................... 28. viii.
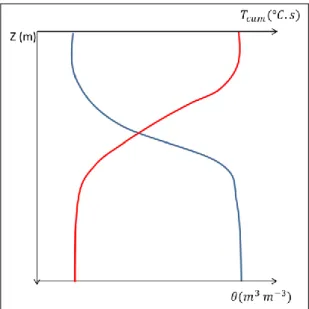
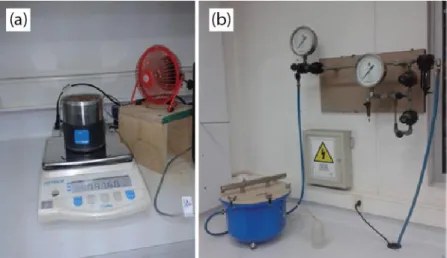
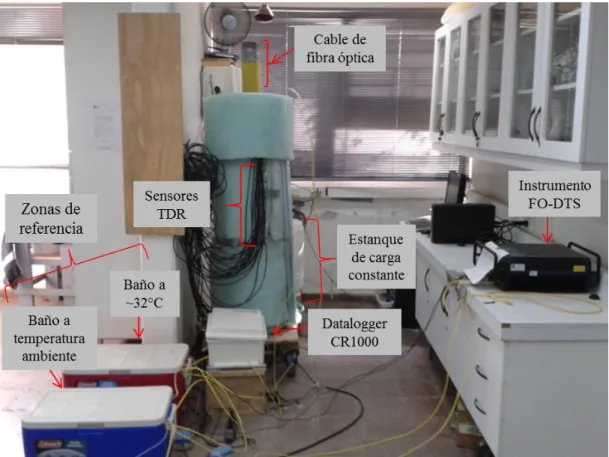
(9) Figura 2-7: Ilustración del concepto de temperatura acumulada, Tcum, cuando se aplica un pulso de calor al cable de fibra óptica. El esquema muestra el aumento de temperatura en un punto específico de la fibra óptica. tf es el tiempo final de la aplicación del pulso de calor, que en este caso coincide con el tiempo total de integración (t0). ....................................................................................................... 30 Figura 2-8: Ilustración de la relación entre los perfiles de Tcum y en un medio poroso parcialmente saturado. ............................................................................................ 33 Figura 3-1: Experiencias para determinar la curva de retención de humedad. (a) Fotografía del instrumento HYPROP con la muestra de suelo. (b) Fotografía del extractor de presión. ............................................................................................... 37 Figura 3-2: Permeámetro de carga variable utilizado para determinar la conductividad hidráulica saturada (Ks)........................................................................................... 39 Figura 3-3: Esquema de la columna experimental donde se pueden apreciar los sensores de humedad (TDR), el cable de fibra óptica y el estanque de carga constante que permite fijar el nivel freático a distintas profundidades. ........................................ 41 Figura 3-4: Fotografía del interior de la columna experimental antes de rellenarla con suelo. En el centro de la columna se observa el cable de fibra óptica y en el borde de la columna se ven los sensores de humedad (TDR CS645). ............................. 42 Figura 3-5: Fotografía del interior de la columna experimental cuando se estaba llenando con el suelo. ............................................................................................................ 43 Figura 3-6: Instrumento FO-DTS, zonas de referencia y distribución del cable de fibra óptica en la instalación experimental. Se muestra además la zona en la cual se aplica una diferencia de potencial eléctrico (V) para generar los pulsos de calor dentro de la columna de suelo. ............................................................................... 44 Figura 3-7: Fotografía de la instalación experimental que se utilizó para evaluar el método activo. ........................................................................................................ 46. ix.
(10) Figura 3-8: Diagrama del sistema automatizado de control de corriente para generar pulsos de calor en cables de fibra óptica. ............................................................... 47 Figura 3-9: Fotografía del sistema eléctrico utilizado para generar los pulsos de calor. . 48 Figura 3-10: Pantalla principal de la interfaz gráfica del sistema regulador de corriente. ................................................................................................................................ 49 Figura 3-11: Ejemplo de un perfil longitudinal de: (a) las señales Raman Stokes y antiStokes; y (b) las temperaturas asociadas a las señales Raman. .............................. 52 Figura 3-12: Interfaz gráfica del programa computacional utilizado para calibrar las mediciones FO-DTS. .............................................................................................. 53 Figura 3-13: Descripción gráfica del intervalo de integración (t) utilizado para calcular la temperatura acumulada (Tcum)............................................................................. 56 Figura 3-14: Descripción gráfica del intervalo de integración (t0) utilizado para evaluar su efecto sobre el contenido de humedad. .............................................................. 57 Figura 4-1: Curva granulométrica del suelo en estudio. .................................................. 59 Figura 4-2: Curva de retención de humedad determinada experimentalmente combinando el método de la evaporación (Peters y Durner, 2008) y el método del extractor de presión (Rowell, 2014), y el modelo de van Genuchten (1980) ajustado a la información experimental. ................................................................. 61 Figura 4-3: Curva de conductividad hidráulica del suelo empleado en este estudio. ...... 62 Figura 4-4: Ejemplo del perfil longitudinal típico de las señales Raman Stokes y antiStokes, y del perfil de temperaturas: (a) señales Raman al final de la aplicación de un pulso de calor. La ubicación de los componentes del sistema (zonas de referencia y columna de suelo) también se presenta en esta figura; (b) perfiles longitudinales de temperatura típicos antes y al final de la aplicación de un pulso de calor. Estos perfiles fueron calibrados usando los métodos propuestos por Hausner et al. (2011). ............................................................................................. 64. x.
(11) Figura 4-5: Evolución temporal de la intensidad de corriente (A) aplicada al cable de fibra óptica por un tiempo de 20 min. .................................................................... 69 Figura 4-6: Perfil de Tcum al aplicar un pulso de calor de 20 min con una intensidad promedio de 17.5 A. El nivel freático se encuentra a una profundidad de 1.20 m. 70 Figura 4-7: Comparación del perfil de y Tcum al aplicar un pulso de calor de 20 minutos. El nivel freático se encuentra a una profundidad de 1.20 m. ................... 71 Figura 4-8: Curva de calibración DS obtenida a partir de un pulso de calor de 20 min. ................................................................................................................................ 73 Figura 4-9: Perfil del contenido de humedad (DS) obtenido a partir de la curva de calibración de un pulso de calor de 20 min con una intensidad de corriente de 17.5 A y cuando el nivel freático se encontraba a 1.20 m de profundidad. La zona achurada corresponde al error de las mediciones DS estimado como el RMSE de los datos medidos con el sistema TDR y los estimados usando el método activo en posiciones ubicadas a la misma profundidad que los sensores TDR...................... 74 Figura 4-10: r2 y RMSE calculados para cada curva DS en función de la duración del pulso de calor. ......................................................................................................... 76 Figura 4-11: Curvas DS vs Tcum para distintas duraciones del pulso de calor: a) 2 min; b) 5 min; c) 10 min; y d) 20 min............................................................................ 77 Figura 4-12: Perfil de humedad estimado con pulsos de distinta duración: a) 2 min; b) 5 min; c) 10 min; y d) 20 min. ................................................................................... 78 Figura 4-13: r2 y RMSE del ajuste de las curvas DS20 cuando t = 5, 10, 30, 60 y 150 s. ................................................................................................................................ 80 Figura 4-14: Determinación del perfil de humedad utilizando el método activo: a) DS20 con t = 5 s; b) DS20 con t = 10 s; c) DS20 con t = 15 s; d) DS20 con t = 30 s; e) DS20 con t = 60 s; y f) DS20 con t = 150 s. ............................................. 82. xi.
(12) Figura 4-15: r2 y RMSE del ajuste de las curvas DS20 cuando t0 = 10, 15, 20, 25, 30 y 35 min. .................................................................................................................... 84 Figura 4-16: Determinación del perfil de humedad utilizando el método activo: a) DS20 con t0 = 10 min; b) DS20 con t0 = 15 min; c) DS20 con t0 = 20 min; d) DS20 con t0 = 25 min; e) DS20 con t0 = 30 min; y f) DS20 con t0 = 35 min. ....................... 85 Figura 4-17: evolución temporal de la intensidad de corriente aplicado al cable de fibra óptica con la columna drenada. .............................................................................. 86 Figura 4-18: r2 y RMSE del ajuste de las curvas DS en función de la intensidad de corriente promedio aplicada al cable de fibra óptica. ............................................. 88 Figura 4-19: Determinación del perfil de humedad utilizando el método activo: a) DS12%; b) DS14% y c) DS16%. ............................................................................ 89 Figura 4-20: Validación del método activo en una repetición de la experiencia usada para construir la curva de calibración (DS20). ...................................................... 90 Figura 4-21: Evaluación del método activo para condiciones hidráulicas distintas. La calibración fue establecida cuando el nivel freático estaba a 1.20 m de profundidad y la evaluación del método corresponde a una situación donde el nivel freático estaba a 0.90 m de profundidad. ............................................................................. 92. xii.
(13) ABSTRACT In recent years, fiber-optic distributed temperature sensing (FO-DTS) methods have been successfully used to investigate a wide range of hydrological applications. In particular, two methods have been developed to monitor the soil water content: the passive and the active methods. This thesis presents an assessment of the active method to determine the soil’s volumetric water content.. In the active method, an armored fiber-optic cable is buried in the ground, and a heat pulse of duration tf is applied along the cable. Then, the thermal response of the cable is analyzed to determine the moisture content at different segments of the cable. To estimate the volumetric water content, the active method uses an empirical correlation between water content and cumulative temperature. Here, the cumulative temperature is defined as the integral of the temperature increase in each segment of the cable between the instant where the heat pulse begins until a final time (t0), which not necessarily is equal to the duration of the heat pulse.. To assess the active method, different experiments were carried out. These experiments had different heat pulse durations (2, 5, 10 and 20 min with electrical powers of 2.12, 2.58, 2.32 and 2.43 W m-1, respectively). These experiments allowed determining the optimum heat pulse duration (tf), the optimum temporal integration interval (t), the optimum final time of integration (t0) used in the calculation of the cumulative temperature, and the optimum current (I) that should circulate through the fiber-optic cable to generate the heat pulse. The results show that the optimum operating parameters are: tf = 20 min, t = 150 s, t0 = tf, and I ≈ 17 A (2.43 W m-1). With this assessment, volumetric water contents ranging from 0.14 to 0.46 m3 m-3 were obtained,. xiii.
(14) with errors that are smaller than 0.07 m3 m-3. Therefore, the active method seems to be a promising technique to measure spatially distributed volumetric water contents.. Keywords: Fiber-optic distributed temperature sensing (FO-DTS), active method, volumetric water content.. xiv.
(15) RESUMEN En los últimos años las mediciones distribuidas de temperaturas con cables de fibra óptica (FO-DTS) se han utilizado con éxito para investigar una amplia gama de procesos hidrológicos. En particular, se han desarrollado dos métodos para monitorear el contenido de humedad volumétrico del suelo: el método pasivo y activo. Esta tesis presenta una evaluación del método activo para determinar el contenido de humedad del suelo.. En el método activo, un cable de fibra óptica con elementos conductores es enterrado en el suelo, y un pulso de calor de duración tf es aplicado a lo largo del cable. Luego, la respuesta térmica del cable se analiza para determinar el contenido de humedad en distintos segmentos del cable. Para estimar el contenido de humedad, el método activo utiliza una correlación empírica entre contenido de humedad volumétrico y temperatura acumulada, la cual se define como la integral del aumento de temperatura en cada segmento del cable entre el instante inicial del pulso de calor y un tiempo final (t0), el cual no necesariamente corresponde a la duración del pulso de calor. Para evaluar el método activo se realizaron distintos experimentos. Estos experimentos tuvieron distintas duraciones del pulso de calor (2, 5, 10 y 20 min con potencias eléctricas de 2.12, 2.58, 2.32 y 2.43 W m-1, respectivamente). Estas experiencias permitieron determinar la duración óptima del pulso de calor (tf), el tiempo de integración óptimo (t), el tiempo final óptimo (t0) utilizado en el cálculo de la temperatura acumulada, y la corriente óptima que debe circular por el cable de fibra óptica para generar el pulso de calor. Los resultados revelan que los parámetros óptimos son: tf = 20 min, t = 150 s, t0 = tf, e I ≈ 17 A (2.43 W m-1). Este análisis permitió obtener contenidos de humedad que van desde 0.14 hasta 0.46 m3 m-3, con errores xv.
(16) menores que 0.07 m3 m-3. Por lo tanto, el método activo aparece como una técnica promisoria para monitorear contenidos de humedad volumétricos de manera espacialmente distribuida.. Palabras clave: Mediciones distribuidas de temperaturas con cables de fibra óptica (FODTS), método activo, contenido de humedad volumétrico.. xvi.
(17) 1. 1 1.1. INTRODUCCIÓN Motivación La necesidad de entender y predecir interacciones entre procesos hidrológicos y. atmosféricos ha promovido el estudio del contenido de humedad () en suelos a nivel mundial y para distintos tipos de climas (Entekhabi et al., 1996; Shuttleworth et al., 2010). Por ejemplo, el año 2014 la Agencia Nacional de Aeronáutica y del Espacio (NASA) de los Estados Unidos realizó la primera misión espacial especialmente dedicada a monitorear contenidos de humedad en la superficie terrestre mediante el uso de imágenes satelitales (Entekhabi et al., 2011). Iniciativas como ésta, que involucran una cantidad importante de recursos económicos para su desarrollo, demuestran la importancia de cuantificar correctamente esta variable hidrológica, que no solamente es clave para entender los fenómenos hidrológicos y atmosféricos, sino que también es crucial para cuantificar la disponibilidad del recurso hídrico en el medio ambiente (Grifoll et al., 2005; Rose et al., 2005; Steele-Dunne et al., 2010). El monitoreo del contenido de humedad tradicionalmente se ha realizado mediante el método gravimétrico (Klute, 1994). Este método de medición puntual consiste en recolectar muestras de suelo en terreno, determinar su peso húmedo y luego secar la muestra en un horno a 105°C durante 24 horas para determinar su peso seco. A pesar de que este método sigue siendo ampliamente utilizado debido a que es la forma más robusta para la determinación del contenido de humedad, posee varias desventajas que impiden que sea empleado periódicamente en un perfil de suelo. Su principal desventaja es que es destructivo. Además, si se requiere monitorear el contenido de humedad a distintas profundidades, este método requiere una excavación previa a la recolección de la muestra de suelo. El proceso de excavación puede modificar las condiciones de humedad de la muestra, por lo que el estudio de la evolución temporal del contenido de humedad y de los flujos de agua en un perfil de suelo generalmente no es posible.
(18) 2. mediante este método. Otra desventaja de este método es que es laborioso, y requiere de bastante tiempo para poder recolectar la muestra (cuando se desea medir el perfil de humedades). Por estas razones, este método no es sustentable en el tiempo (Reynolds, 1970; Schmugge et al., 1980). Debido a las desventajas del método gravimétrico, otros métodos de medición de contenidos de humedad han sido desarrollados (Schmugge et al., 1980; Topp et al., 1980; Dalton y van Genuchten, 1986). Actualmente, el método puntual más popular de medición de humedad en suelos corresponde a la reflectometría de dominio temporal (TDR, por sus siglas en inglés) (Topp et al., 1980). Este es un método electromagnético indirecto, rápido y no destructivo que permite estimar el contenido de humedad de un suelo a partir de su constante dieléctrica aparente, a (-). Debido a la gran diferencia entre la constante dieléctrica del agua (agua ≈ 80), del aire (aire ≈ 1), y de los constituyentes sólidos del suelo seco (sólidos ≈ 3-5), pequeños cambios en el contenido de humedad de un suelo implican grandes cambios en su constante dieléctrica aparente, lo que permite la determinación del contenido de humedad de un suelo. Topp et al. (1980) reportaron una ecuación empírica comúnmente llamada "ecuación universal", que relaciona el contenido de humedad, θ (m3 m-3), y la constante dieléctrica aparente de un suelo. Esta relación ha permitido el uso extensivo de la técnica TDR debido a que es independiente de los constituyentes del suelo. Por lo tanto, en teoría, no sería necesario calibrar los sensores antes de su instalación en terreno. Sin embargo, estudios posteriores han demostrado que existe una dependencia importante entre la constante dieléctrica aparente de un suelo y su salinidad (Nadler et al., 1999; Persson et al, 2004; Friedman, 2005), la temperatura (Or y Wraith, 1999; Seyfried y Grant, 2007), y la mineralogía del suelo (Regalado et al., 2003). A pesar de que técnicamente es posible medir el perfil de humedad de un suelo con la técnica TDR (Famiglietti et al., 1999, 2008), es importante tener en cuenta que monitorear contenidos.
(19) 3. de humedad a escalas espaciales mayores puede aumentar considerablemente el costo de la red de sensores requerida para realizar esta tarea (Shuttleworth et al., 2010). Mediciones indirectas del contenido de humedad a escalas del orden de 1 km son posibles utilizando métodos innovadores como el uso de neutrones (Desilets et al., 2010). Estos neutrones se generan naturalmente en la superficie terrestre debido a rayos cósmicos energéticos y responden fuertemente a la presencia de agua en las cercanías de la superficie de la tierra. Por lo tanto, permiten estimar contenidos de humedad hasta profundidades de aproximadamente 70 cm. En principio, esta metodología podría ser aplicada en zonas complejas como en ambientes salinos, humedales o turberas, suelos rocosos o en la zona activa del permafrost. Lamentablemente, debido a que este método está enfocado a escalas representativas de hidrología superficial, no entrega información significativa para el completo entendimiento de los flujos de agua a través de la zona vadosa. Imágenes satelitales también han sido utilizadas en la determinación del contenido de humedad en suelos (Albergel et al., 2010; Entekhabi et al., 2011; Rebel et al., 2012). Actualmente la NASA está llevando a cabo un proyecto para mapear globalmente el contenido de humedad en la superficie terrestre a partir de mediciones realizadas en el espacio (Soil Moisture Active Passive (SMAP) Mission - Entekhabi et al. (2011)). Utilizando distintos tipos de radares se podrá observar el contenido de humedad a través de la vegetación, independiente de la nubosidad existente en la zona de medición, durante el día o la noche. La resolución espacial de estas mediciones variará desde 29 km x 35 km hasta mediciones de 1 km x 3 km. En este proyecto se realizarán mediciones periódicas del contenido de humedad, el cual será validado en una zona experimental ubicada en Oklahoma, Estados Unidos (Steele-Dunne et al., 2010; Cosh et al., 2011). Debido a la naturaleza de las imágenes satelitales, estas mediciones permitirán obtener excelentes resultados a escala de cuenca (3-1000 km2), los cuales permitirán analizar cómo las variaciones del contenido de humedad en suelos afectan las.
(20) 4. condiciones atmosféricas y climáticas. Sin embargo, solamente permiten estimar esta variable en los primeros centímetros del suelo. A escalas del orden de centímetros o de metros, las cuales son adecuadas para el estudio de los flujos de agua y del contenido de humedad en la zona vadosa, los métodos térmicos han sido ampliamente utilizados para la determinación del contenido de humedad y del movimiento de agua (de Vries y Peck, 1958; Campbell et al., 1991). Estos métodos generalmente se basan en la aplicación de un pulso de energía utilizando una fuente lineal, e.g., un cable, donde la respuesta térmica del suelo es analizada (Bristow et al., 1994) y las propiedades térmicas del suelo son inferidas. La tasa de disipación de calor depende de la densidad del suelo, mineralogía, forma de las partículas y, primordialmente del contenido de humedad (Shiozawa y Campbell, 1990). La respuesta térmica del suelo puede ser monitoreada en el mismo punto donde se realiza la inyección de energía (de Vries y Peck, 1958; Shiozawa y Campbell, 1990; Bristow et al., 1994) o en puntos cercanos a ella mediante el uso de múltiples sensores (Lubimova et al., 1961; Jaeger, 1965; Larson, 1988; Campbell et al., 1991; Bristow et al., 1993, 1994; Heitman et al., 2003; Ren et al., 2003, 2005). Varios métodos analíticos y numéricos han sido desarrollados para interpretar la disipación del pulso de calor en suelos. Generalmente, se asume una fuente lineal de energía infinitamente larga y de radio finito, donde las propiedades térmicas del suelo son calculadas resolviendo la ecuación de conducción térmica en coordenadas radiales (Jaeger, 1965; Carslaw y Jaeger, 1959). Para cuantificar el contenido de humedad, estos métodos se enfocan en el cálculo de la conductividad térmica y del calor específico del suelo a partir de su respuesta térmica a un pulso de calor. A partir de estos valores, el contenido de humedad es inferido debido a que las propiedades térmicas de un suelo húmedo generalmente son funciones monótonas que aumentan a medida que aumenta el contenido de humedad..
(21) 5. Recientemente, métodos distribuidos de temperatura utilizando cables de fibra óptica (FO-DTS, por sus siglas en inglés), han sido empleados para determinar flujos de agua y contenidos de humedad en el subsuelo (Weiss, 2003a,b; Perzmaier et al., 2004, 2006; Aufleger et al., 2005; Sayde et al., 2010, 2014; Steele-Dunne et al., 2010; Ciocca et al., 2012; Striegl y Loheide, 2012). Estos métodos utilizan la reflexión de luz al interior de un cable de fibra óptica para determinar la temperatura a lo largo del cable (esto es explicado con más detalle en la sección de teoría). Métodos FO-DTS permiten monitorear temperaturas con una resolución espacial de 0.25-2.0 m, una resolución temporal de 1-60 s, y una precisión de temperatura de ±0.01 °C, a lo largo de cables de hasta 10 km de longitud (Selker et al., 2006; Tyler et al., 2009; Suárez et al., 2011a). Esta tecnología permite realizar este monitoreo en grandes extensiones, ofreciendo una alternativa relativamente económica para realizar mediciones continuas en miles de ubicaciones dentro de una cuenca o de una zona de interés. En el pasado, se concluyó que la cuantificación de contenidos de humedad a partir de métodos FO-DTS solamente podía ser cualitativa, es decir, que solamente se podría distinguir entre zonas secas, húmedas o saturadas (Weiss, 2003a). Esto debido a que se determinó que pequeños cambios en el contenido de humedad volumétrico no podrían ser detectados para contenidos de humedad volumétricos mayores que 0.06 m3 m-3. Según Weiss (2003a), solamente una mejora significativa de la razón señal/ruido de los instrumentos FO-DTS podría ser suficiente para cuantificar el contenido de humedad volumétrico por sobre 0.06 m3 m-3. Sin embargo, recientemente se desarrollaron los métodos pasivo y activo que han permitido cuantificar los contenidos de humedad con una mayor precisión (Steele-Dunne et al., 2010; Sayde et al., 2010). En estos métodos, el cable de fibra óptica debe ser enterrado a distintas profundidades del suelo. En el método pasivo, el sistema FO-DTS mide las fluctuaciones de temperatura que se generan debido a los ciclos radiativos diarios; mientras que en el método activo, el cable es calentado y se monitorea la respuesta térmica a lo largo del cable..
(22) 6. En el método pasivo, se registra la distribución espacial de temperaturas en el suelo durante varios días, y luego se utiliza la ecuación de energía para encontrar los parámetros térmicos del suelo que representan las observaciones realizadas (SteeleDunne et al., 2010). Estos parámetros son función del contenido de humedad del suelo. Al registrar las temperaturas a diferentes profundidades, las propiedades térmicas del suelo pueden ser inferidas mediante un proceso de inversión de parámetros, y luego el contenido de humedad puede ser estimado usando una relación representativa entre la conductividad térmica y la humedad (e.g., Johansen, 1975; Campbell, 1985). Steele-Dune et al. (2010) desarrollaron el método pasivo. Ellos enterraron dos cables de fibra óptica a aproximadamente 8 y 10 cm bajo la superficie del suelo para monitorear la respuesta térmica de la señal diurna producida por la radiación solar (Figura 1-1). Una sección de aproximadamente 50 m fue utilizada para medir la evolución térmica a cada profundidad y el contenido de humedad del suelo fue derivado a partir de estas mediciones. A pesar de que Steele-Dunne et al. (2010) obtuvieron resultados razonables tanto para la difusividad térmica como para la saturación relativa (Figura 1-2), se debe señalar que este método se basa en el conocimiento de la profundidad del cable y, pequeñas variaciones en esta profundidad podrían causar grandes errores en la estimación de las propiedades térmicas del suelo y de su contenido de humedad. El punto clave de este método es la relación entre la humedad del suelo y su conductividad térmica. Por lo tanto, esta relación también debe ser desarrollada mediante mediciones in-situ en todo el rango de humedades..
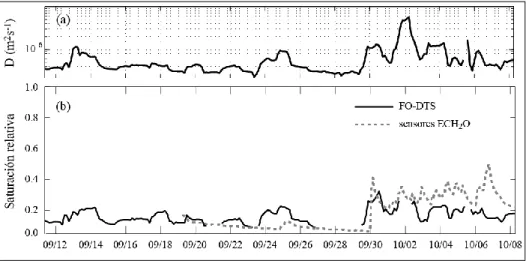
(23) 7. Figura 1-1: Determinación del contenido de humedad volumétrico de un suelo usando el método pasivo (Steele-Dunne et al., 2010; Suárez, 2013). Figura 1-2: (a) Determinación de la difusividad térmica (D) del suelo en una ubicación del cable de fibra óptica. (b) Saturación relativa media observada mediante sensores ECH2O e inferidos a partir de las estimaciones de la difusividad térmica (Modificado de Steele-Dunne et al., 2010; Suárez, 2013)..
(24) 8. Por otro lado, en el método activo, el sistema FO-DTS utiliza cables de fibra óptica con elementos metálicos (conductores eléctricos), donde una diferencia de voltaje se aplica entre los extremos del cable para calentarlo durante un periodo de tiempo determinado. Sayde et al. (2010) desarrollaron el método activo y demostraron que se puede cuantificar el contenido de humedad de manera más precisa que la realizada en el pasado. Ellos enterraron un cable de fibra óptica compuesto por elementos eléctricamente conductores en una columna de arena ensayada en el laboratorio. El cable fue calentado a través pulsos de calor de 120 s de duración y la variación térmica en el cable permitió posteriormente correlacionar una variable llamada temperatura acumulada con el contenido de humedad. En su investigación, Sayde et al. (2010) lograron cuantificar la humedad de un suelo arenoso entre contenidos de humedad volumétricos de 0.04 y 0.40 m3 m-3, con una precisión de 0.001 y de 0.046 m3 m-3, respectivamente (Figura 1-3).. Figura 1-3: Temperatura acumulada (Tcum) integrada en 120 s como función del contenido de humedad (). Para cada contenido de humedad, las barras de error corresponden a la desviación estándar de tres repeticiones (Sayde et al., 2010)..
(25) 9. La diferencia entre la metodología aplicada por Sayde et al. (2010) y la metodología utilizada en estudios anteriores (Weiss, 2003a; Perzlmaier et al., 2004) es la interpretación de los resultados experimentales. Por un lado, Weiss (2003a) y Perzlmaier et al. (2004) utilizaron una metodología que considera tiempos lejanos a la aplicación de un pulso de calor prolongado para determinar la conductividad térmica del suelo, para luego determinar el contenido de humedad mediante una curva de calibración. Desafortunadamente, este método de ajuste utilizaba datos experimentales que variaban muy poco entre contenidos de humedad, siendo poco sensible a estos cambios. Por otro lado, Sayde et al. (2010), al observar los resultados obtenidos por Weiss (2003a) y Perzlmaier et al. (2004), se dieron cuenta de que el cambio de temperaturas es bastante sensible al contenido de humedad durante el calentamiento de la fuente de energía y, al analizar datos obtenidos en tiempos cercanos a la aplicación del pulso de calor, lograron cuantificar el contenido de humedad en el rango completo de humedades de un suelo. Sayde et al. (2014) extendieron su trabajo de laboratorio y realizaron pruebas en un campo agrícola sujeto a irrigación para determinar el contenido de humedad y los flujos de agua cerca de la superficie del suelo. Con este objetivo, enterraron un cable de fibra óptica de 750 m de largo en tres transectos de ~240 m, a profundidades de 0.30, 0.60 y 0.90 m. La curva de calibración del contenido de humedad obtenida previamente en el laboratorio fue utilizada para estimar el contenido de humedad en el campo. Los resultados de Sayde et al. (2014) demuestran que la curva de calibración obtenida en laboratorio era aplicable para las profundidades de 0.30 y 0.60 m, mientras que para 0.90 m de profundidad no se obtuvieron buenos resultados, principalmente debido a la heterogeneidad del suelo. Ciocca et al. (2012) aplicaron el método activo en un lisímetro, el cual fue llenado con un suelo franco. En el primer metro del lisímetro instalaron un cable de fibra óptica de 30 m de largo, con la finalidad de determinar contenidos de humedad utilizando el método activo. Para inferir la distribución del contenido de humedad ellos analizaron.
(26) 10. dos estrategias para estimar la conductividad térmica del suelo. La primera se basa en el análisis de la fase de calentamiento y permite estimar simultáneamente la capacidad calórica del suelo. La segunda se basa en analizar la fase de enfriamiento. Dado que tanto la conductividad térmica y la capacidad calorífica del suelo dependen de la humedad de éste, es posible inferir el contenido de humedad a partir de las propiedades térmicas. Striegl y Loheide (2012) aplicaron el método activo en un transecto de aproximadamente 130 m de longitud bajo condiciones de campo, y denominaron al método monitoreo distribuido de humedad (DS, por sus siglas en inglés). Ellos ajustaron una función exponencial que relaciona el contenido de humedad y el aumento de temperatura en el cable (∆T-θ), obteniendo un r2 y un RMSE de la función ajustada de 0.94 y 0.16 °C, respectivamente. Además, encontraron que la pendiente de la relación ∆T-θ (curva de respuesta DθS) disminuye a medida que el contenido de humedad aumenta, lo que es consistente con resultados de estudios anteriores y que sugiere que el método activo es menos preciso para contenidos de humedad más altos (Weiss 2003a,b; Sayde et al., 2010). La ventaja de utilizar el método activo para determinar contenidos de humedad utilizando la tecnología FO-DTS, es que solamente se requiere un cable que permite aplicar el pulso de calor y monitorear la disipación de energía. Debido a que los métodos FO-DTS solamente requieren una calibración para poder determinar la temperatura a lo largo de todo el cable (Suárez et al., 2011a, b), se elimina la incertidumbre que existe al tener múltiples calibraciones de sensores (uno de los principales problemas al realizar mediciones puntuales con múltiples sensores). Adicionalmente, la escala espacial que se puede alcanzar con métodos FO-DTS permite observar fenómenos que ocurren desde centímetros incluso hasta kilómetros, lo que abre una nueva ventana al entendimiento de los procesos físicos que ocurren en el medioambiente..
(27) 11. A pesar de que existen estudios que han investigado el método activo para determinar contenidos de humedad, no existen trabajos que presenten una evaluación sistemática de la exactitud y precisión de esta metodología. Por lo tanto, esta investigación busca complementar las investigaciones anteriores mediante un análisis de incertidumbre del método activo. 1.2. Hipótesis de investigación La hipótesis de esta investigación es que el método activo permite cuantificar. contenidos de humedad con una exactitud y precisión suficiente para un correcto estudio del estado hídrico en medios porosos. 1.3. Objetivos El objetivo principal de esta investigación es evaluar experimentalmente el método. activo, desarrollado por Sayde et al. (2010), para comprender la precisión y exactitud que este método puede alcanzar. Los objetivos específicos de este trabajo son: 1) Construir una instalación experimental que permita evaluar el método activo para determinar contenidos de humedad de manera distribuida. 2) Investigar la exactitud y precisión térmica que pueden alcanzar los métodos FO-DTS cuando se evalúa el método activo. 3) Construir curvas de calibración del método activo para suelos arenosos, considerando la duración del pulso de calor y el tiempo óptimo de integración de la respuesta térmica del suelo. 4) Investigar el efecto de los parámetros de operación del método activo en la determinación de contenidos de humedad. Dentro de estos parámetros se encuentran: i) la duración del pulso de calor; ii) el intervalo de integración de los datos FO-DTS; iii) el tiempo final de integración en el cálculo de la temperatura acumulada; y iv) la.
(28) 12. intensidad de corriente que se hace circular por los cables para aplicar los pulsos de calor. 1.4. Estructura de esta tesis La estructura de lo que resta del documento está organizada de la siguiente. manera: primero se presenta una descripción de la teoría empleada en esta investigación, la cual está subdividida en teoría de sistemas FO-DTS y teoría de métodos térmicos para determinar pulsos de calor. Luego, se describen los materiales y métodos, presentando las metodologías asociadas a: 1) la caracterización del suelo utilizado; 2) la instalación experimental que fue construida para realizar esta investigación; y 3) la evaluación del método activo para determinar contenidos de humedad. Después, se describen y analizan los resultados para luego presentar las conclusiones de esta investigación..
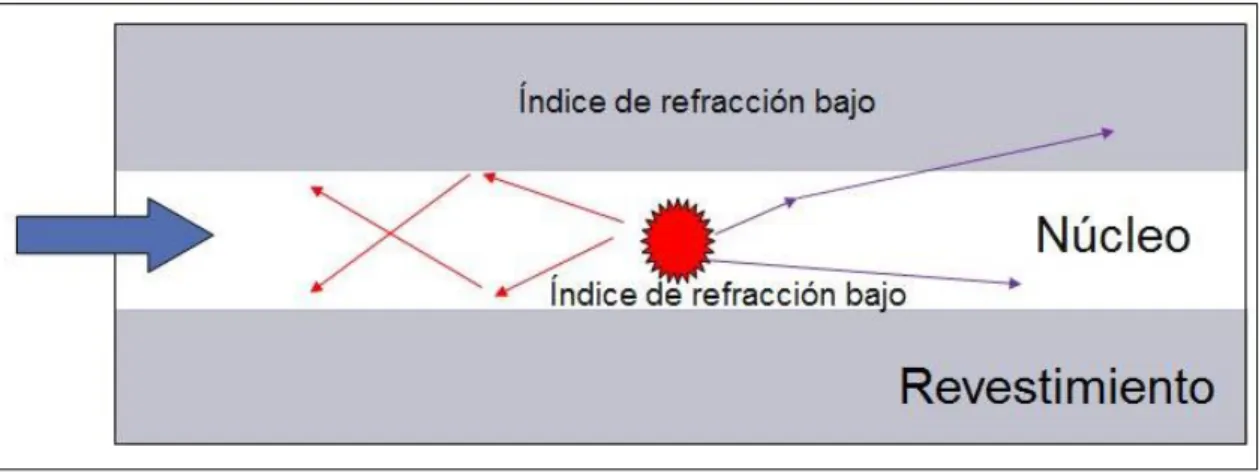
(29) 13. 2 2.1. TEORÍA Medición distribuida de temperaturas usando FO-DTS La tecnología FO-DTS utiliza principios de dispersión Raman para estimar las. temperaturas a lo largo de un cable de fibra óptica. De este modo, el cable se comporta como un termómetro que puede alcanzar una resolución térmica del orden de ±0.01 °C, y resoluciones espaciales y temporales de 0.26-2.0 m y 1-60 s, respectivamente, en cables de hasta 10 km, dependiendo de la integración temporal seleccionada y de los instrumentos utilizados (Selker et al., 2006; Hausner et al., 2011). En esta sección se presenta la teoría que utilizan los sistemas FO-DTS para determinar la temperatura a lo largo de la fibra óptica. Para medir las temperaturas a lo largo del cable, el instrumento FO-DTS emite pulsos de láser a una frecuencia (o longitud de onda) conocida. Estos pulsos de luz iluminan una fibra óptica, la cual consiste en un núcleo de vidrio rodeado por un revestimiento de vidrio con un índice de refracción mucho más bajo que el del núcleo (Figura 2-1). A medida que la luz viaja a lo largo de la fibra, una fracción de ella es dispersada debido a la interacción con la estructura cristalina y con la frecuencia de vibración (temperatura) de la fibra (Hausner, 2010). La luz dispersada viaja de vuelta hacia el emisor de luz (Figura 2-1), donde un receptor la recolecta. La dispersión de la luz puede ser clasificada como elástica o inelástica. La dispersión elástica, conocida como dispersión Rayleigh, ocurre cuando la energía cinética de los fotones incidentes se conserva. Por lo tanto, la frecuencia de los fotones dispersados es igual a la frecuencia de la luz incidente (Figura 2-2). Por otro lado, la dispersión inelástica ocurre cuando la energía cinética de los fotones no se conserva. Esto produce que la frecuencia de la luz incidente y de los fotones dispersados (o reflejados) no coincida. En fibras ópticas, la dispersión inelástica generalmente tiene dos componentes (Dakin et al., 1985): Brillouin y Raman (Figura 2-2). La dispersión Brillouin se propaga como ondas acústicas y es el.
(30) 14. resultado de los cambios de la densidad del medio, debido a interacciones entre ondas de luz que se propagan en todas las direcciones dentro de la fibra (Kurashima et al., 1990). La dispersión Brillouin ocurre a una amplitud conocida, pero tiene una frecuencia variable. La dispersión Raman, que ocurre a frecuencias conocidas, se produce por interacciones entre los fotones y las moléculas que vibran dentro de la estructura cristalina de la fibra de vidrio. Esta interacción produce un desplazamiento de la luz en un rango de frecuencia predecible (Figura 2-2).. Figura 2-1: Dispersión de la luz dentro de una fibra óptica. La luz dispersada hacia frecuencias más bajas (o longitudes de onda más largas) que la luz incidente se le denomina Stokes (Figura 2-2), mientras que la luz dispersada hacia frecuencias más altas (o longitudes de onda más cortas) se le llama anti-Stokes. La señal Stokes se produce cuando un fotón excita a una molécula en un estado vibratorio base, y la molécula vuelve a un estado ligeramente más alto (Figura 2-3 (b)). Cuando el fotón incidente golpea a una molécula previamente excitada y esta molécula vuelve a su estado base, se genera la dispersión anti-Stokes (Figura 2-3 (c)). A mayor temperatura de la fibra, mayor será el número de colisiones entre moléculas previamente excitadas y mayor será la amplitud de la dispersión anti-Stokes (Smith y Dent, 2005)..
(31) 15. Figura 2-2: Espectro óptico de la luz en un punto dentro de la fibra donde ocurre dispersión. En FO-DTS, la razón entre las señales Stokes y anti-Stokes de la dispersión Raman se utiliza para determinar la temperatura en el punto de dispersión. Aunque las frecuencias de las señales Raman son predecibles, sus intensidades no lo son. La intensidad de la dispersión anti-Stokes depende fuertemente de la temperatura de las moléculas de sílice de la fibra, mientras que la intensidad de la dispersión Stokes depende débilmente de esta temperatura (Figura 2-2). Debido a esta dependencia diferencial de la temperatura, la razón entre las señales Stokes y anti-Stokes se puede usar para determinar la temperatura de la fibra en el punto de dispersión de la luz. La distancia del punto de dispersión de la luz se calcula mediante reflectometría óptica de dominio temporal (OTDR, por sus siglas en inglés) utilizando la velocidad de la luz en la fibra de vidrio, que depende de la frecuencia de la luz y el índice de refracción de la propia fibra. En fibras ópticas estándar, la velocidad de la luz varía entre 1.7x108 y 2x108 m s-1 (Hausner, 2010)..
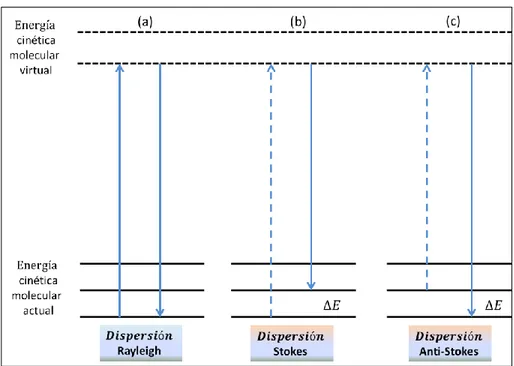
(32) 16. Figura 2-3: Interacción entre la luz dispersada y la estructura cristalina de una fibra óptica (Smith y Dent, 2005). Los instrumentos FO-DTS que están disponibles en el mercado generalmente utilizan un pulso laser de 10-20 ns para iluminar la fibra óptica. Después de emitir el pulso de láser, las señales dispersadas regresan al instrumento, donde son recolectadas por el detector del equipo en períodos de tiempo discretos. Debido a que la luz en la fibra viaja aproximadamente 2 m cada 10 ns, las señales que llegan al instrumento FODTS durante los primeros 10 ns después del pulso de luz proceden del primer metro de la fibra. Por lo tanto, si la unidad de detección de señales se configura para recolectar datos cada 10 ns, el instrumento FO-DTS entregará mediciones de temperaturas integradas cada 1 m de fibra. El instrumento DTS repite la emisión de pulsos de luz y almacena la información de forma continua durante períodos de tiempo según lo especificado por el usuario. Un diagrama de un sistema FO-DTS típico se presenta en la Figura 2-4)..
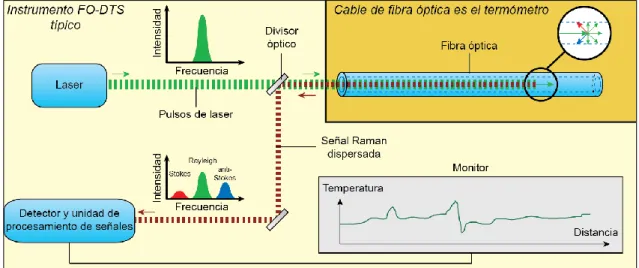
(33) 17. Figura 2-4: Diagrama de un sistema típico de medición distribuida de temperaturas usando cables de fibra óptica (Suárez et al., 2011a). Las intensidades de las señales Stokes y anti-Stokes recolectadas en el instrumento FO-DTS pueden ser expresadas como (Rogers, 1999; Hausner et al., 2011; Suárez et al., 2011a): 𝐼𝑆 (𝑥) = 𝐼0 𝐼𝑆𝑅 𝑒𝑥𝑝(−𝛼0 𝑥) 𝑒𝑥𝑝(−𝛼𝑆 𝑥)℘𝑆 𝛤𝑆 𝐼𝑎𝑆 (𝑥) = 𝐼0 𝐼𝑎𝑆𝑅 𝑒𝑥𝑝(−𝛼0 𝑥) 𝑒𝑥𝑝(−𝛼𝑎𝑆 𝑥)℘𝑎𝑆 𝛤𝑎𝑆. (2.1) (2.2). donde 𝐼𝑆 (𝑥) y 𝐼𝑎𝑆 (𝑥) (unidades arbitrarias) son las intensidades de las señales Raman Stokes y anti-Stokes, respectivamente, detectadas por el instrumento FO-DTS. Estas señales son producidas en un evento de dispersión en la fibra que ocurre a una distancia x del instrumento; 𝐼0 (unidad arbitraria) es la intensidad del pulso láser emitido desde el instrumento FO-DTS; 𝐼𝑆𝑅 y 𝐼𝑎𝑆𝑅 (unidades arbitrarias) son intensidades de referencia que permiten cuantificar la eficiencia relativa de los receptores que recolectan los fotones de las señales Stokes y anti-Stokes en las frecuencias relevantes; 𝛼0 , 𝛼𝑆 y 𝛼𝑎𝑆 (m-1) son los coeficientes de atenuación del pulso láser emitido, de la señal Stokes y de.
(34) 18. la señal anti-Stokes, respectivamente, considerados uniformes a lo largo de la fibra; ℘𝑆 y ℘𝑎𝑆 (-) son la distribución de probabilidad de Bose-Einstein de los fotones de las señales Stokes y anti-Stokes (Farahani y Gogolla, 1999); y Γ𝑆 y Γ𝑎𝑆 (-) son los coeficientes de captura de las señales Stokes y anti-Stokes, los cuales representan la fracción de la luz dispersada que se dirige de nuevo hacia la fuente de luz (Hausner et al., 2011). La razón entre los coeficientes de captura de las señales Stokes y anti-Stokes, Γ𝑆 /Γ𝑎𝑆 , se puede aproximar como (𝜆𝑆 ⁄𝜆𝑎𝑆 )4 , donde 𝜆𝑆 y 𝜆𝑎𝑆 (m) son las longitudes de onda de las señales Stokes y anti-Stokes, respectivamente (Yilmaz y Karlik, 2006). En las ecuaciones (2.1) y (2.2), el término "exp(−𝛼0 𝑥)" representa la atenuación de la luz emitida a medida que se aleja del instrumento FO-DTS. Los términos "exp(−𝛼𝑆 𝑥)" y "exp(−𝛼𝑎𝑆 𝑥)" representan la atenuación de las señales Stokes y anti-Stokes, respectivamente, a medida que la luz dispersada viaja de vuelta al instrumento FO-DTS. Estas atenuaciones son diferentes porque las señales de dispersión Raman tienen frecuencias distintas. La distribución de probabilidad de los fotones de Bose-Einstein puede ser descrita como (Farahani y Gogolla, 1999): ∆𝐸 −1 ℘𝑆 = [1 − 𝑒𝑥𝑝 (− )] 𝑘𝑇. ℘𝑎𝑆 = [𝑒𝑥𝑝 (−. ∆𝐸 ∆𝐸 −1 )] [1 − 𝑒𝑥𝑝 (− )] 𝑘𝑇 𝑘𝑇. (2.3). (2.4). donde ∆𝐸 (J K-1) representa la diferencia en los estados moleculares de energía que produce la dispersión Raman (Figura 2-3); k (J K-1) es la constante de Boltzmann; y T (K) es la temperatura absoluta. Sustituyendo las ecuaciones (2.3) y (2.4) en las ecuaciones (2.1) y (2.2), respectivamente, tomando la razón entre las intensidades Stokes y anti-Stokes, R(x) (-), y definiendo 𝑅𝑅 = 𝐼𝑆𝑅 ⁄𝐼𝑎𝑆𝑅 (-), se obtiene:.
(35) 19. 𝑅(𝑥) =. 𝐼𝑆 (𝑥) 𝜆𝑆 4 𝛥𝐸 𝑒𝑥𝑝(−𝛼𝑆 𝑥) = 𝑅𝑅 ( ) 𝑒𝑥𝑝 ( ) 𝐼𝑎𝑆 (𝑥) 𝜆𝑎𝑆 𝑘𝑇 𝑒𝑥𝑝(−𝛼𝑎𝑆 𝑥). (2.5). Definiendo ∆𝛼 = 𝛼𝑎𝑆 − 𝛼𝑆 (m-1) como la atenuación diferencial de las señales anti-Stokes y Stokes, y reordenando la ecuación (2.5) se obtiene: 𝑇(𝑥) =. 𝛥𝐸 ⁄𝑘 𝜆 4 𝑙𝑛[𝑅(𝑥)] − 𝑙𝑛[𝑅𝑅 ] − 𝑙𝑛 [( 𝑆 ) ] − ∆𝛼𝑥 𝜆𝑎𝑆. (2.6). En estudios de FO-DTS asociados al área de hidrología, se acostumbra a definir los parámetros 𝛾 = 𝛥𝐸 ⁄𝑘 (J K-1) y 𝐶 = −𝑙𝑛[𝑅𝑅 ] − 𝑙𝑛[(𝜆𝑆 ⁄𝜆𝑎𝑆 )4 ] (-) (Hausner et al., 2011; Suárez et al., 2011b). Estos parámetros generalmente se utilizan como parámetros de calibración y dependen de la frecuencia del láser incidente, de las señales Raman, del sistema electrónico del instrumento (detector de fotones), y de las condiciones de operación del instrumento FO-DTS. Reemplazando los parámetros 𝛾 y 𝐶 en la ecuación (2.6) se obtiene: 𝑇(𝑥) =. 𝛾 𝑙𝑛[𝑅(𝑥)] + 𝐶 − ∆𝛼𝑥. (2.7). La ecuación (2.7) describe la temperatura a lo largo de toda la fibra óptica y asume que la atenuación diferencial es uniforme a lo largo de la fibra. Sin embargo, ésta podría cambiar a lo largo de la fibra debido a diferencias en la fabricación, la tensión u otros defectos que atenuarían las dos frecuencias Raman de manera diferente (Hausner et al., 2011). Cuando existen defectos en la fibra que hacen que la atenuación diferencial no sea uniforme, la temperatura a lo largo del cable puede ser estimada como (van de Giesen et al., 2012):.
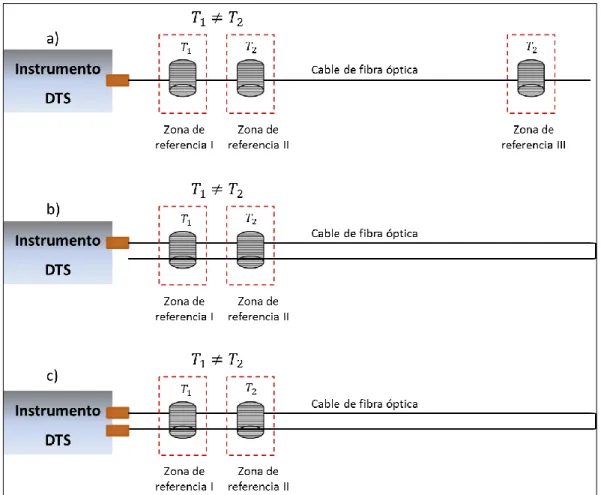
(36) 20. 𝑇(𝑥) =. 𝛾 𝑥. 𝑙𝑛[𝑅(𝑥)] + 𝐶 − ∫0 ∆𝛼𝑑𝑥. (2.8). La ecuación (2.8) puede ser resuelta si es que se ilumina la fibra por ambos extremos (Tyler et al., 2009; van de Giesen et al., 2012). En la presente investigación, la atenuación diferencial fue uniforme y por lo tanto se utilizó la ecuación (2.7) para determinar temperaturas a lo largo del cable, la cual requiere conocer la razón de las intensidades Stokes y anti-Stokes. Más adelante se describe el algoritmo de calibración empleado para encontrar los parámetros , y C que permiten encontrar el perfil de temperaturas a lo largo de los cables de fibra óptica. Como se describió anteriormente, cuando se determina la temperatura a lo largo de la fibra óptica, la ubicación del punto de dispersión también debe ser conocida. Esta ubicación se puede encontrar mediante la medición de la duración de la reflexión de la luz en la fibra óptica. La distancia, x, recorrida por la luz puede ser estimada por (Yilmaz y Karlik, 2006): 𝑥=. 𝑐𝑡 2𝑛𝑓. (2.9). donde c es la velocidad de la luz en el vacío, nf es el índice de refracción de la fibra, y t es el tiempo de propagación de la luz (tanto en la dirección hacia adelante como en la dirección hacia atrás). 2.1.1. Configuraciones típicas de sistemas FO-DTS. Existen tres configuraciones típicas de instalaciones experimentales FO-DTS:. “simplex single-ended”, “duplex single-ended” y “double-ended”. La Figura 2-5 presenta un esquema de cada una de estas configuraciones (Hausner et al., 2011)..
(37) 21. Figura 2-5: Tipo de configuraciones típicas en instalaciones experimentales FO-DTS: a) configuración “simplex single-ended”; b) configuración “duplex single-ended”; c) configuración “double-ended”. Modificado de Hausner et al. (2011). La configuración “simplex single-ended” usa un sistema FO-DTS que mide temperaturas a lo largo del cable con una sola fibra óptica, donde un extremo de la fibra está conectado al instrumento, y el otro se encuentra alejado de éste impidiendo su conexión (Figura 2-5 (a)), i.e., solamente se ilumina la fibra por un extremo. Según las recomendaciones entregadas por Hausner et al. (2011), para obtener mediciones de temperaturas precisas, en este tipo de instalaciones se debe conocer la temperatura en tres zonas de referencia, dos de ellas ubicadas en un extremo del cable y la otra ubicada.
(38) 22. en el otro extremo de éste. Además, es necesario que las temperaturas de referencia de las zonas contiguas sean distintas. En este tipo de configuración, las temperaturas medidas en las zonas más cercanas al instrumento son las que tienen un menor error de medición y las más alejadas poseen un mayor error (Tyler et al., 2009; Hausner et al., 2011; Suárez et al., 2011b). La configuración “duplex single-ended” es similar a la configuración anterior, con la diferencia que el extremo más lejano de la fibra se encuentra cerca del instrumento (Figura 2-5 (b)). Esta configuración tiene la ventaja de que para obtener temperaturas con una alta resolución solamente se requieren dos zonas de referencia, las cuales deben estar a distintas temperaturas (Hausner et al., 2011). Al igual que en la configuración anterior, las temperaturas medidas en las cercanías del instrumento tienen un menor error de medición, mientras que las temperaturas al final del cable poseen un mayor error (Tyler et al., 2009; Hausner et al., 2011; Suárez et al., 2011b). La configuración “double-ended” es similar a la configuración “duplex singleended”, con la diferencia de que ahora ambos extremos de la fibra se conectan al instrumento FO-DTS (Figura 2-5 (c)). Esta configuración permite iluminar el cable de fibra óptica por ambos lados y, por lo tanto, tener dos estimaciones de la temperatura en cada punto de la fibra. Una de las ventajas de la configuración “double-ended” es que permite determinar la atenuación diferencial a lo de la fibra, por lo que si existiesen defectos en la fibra que produzcan una atenuación diferencial variable a lo largo de ella, esta configuración permite corregir estos efectos (Tyler et al., 2009; van de Giesen et al., 2012). En este tipo de configuración, a diferencia de las anteriores, las temperaturas medidas en la zona media del cable poseen un menor error de medición. Esto se debe a que la estimación del perfil de temperaturas a lo largo del cable resulta de una convolución de las señales Raman Stokes y anti-Stokes recolectadas a ambos extremos del cable (Hausner et al., 2011; Suárez et al., 2011b; van de Giesen et al., 2012)..
(39) 23. 2.1.2. Calibración de sistemas FO-DTS Existen varios algoritmos de calibración de perfiles de temperatura a partir de las. señales Raman Stokes y anti-Stokes, los cuales dependen del tipo de configuración de la instalación experimental FO-DTS (Hausner et al., 2011; van de Giesen et al., 2012). En la presente investigación, las mediciones FO-DTS fueron realizadas utilizando la configuración “duplex single-ended” y calibradas utilizando el algoritmo #2 presentado por Hausner et al. (2011), que consiste en el cálculo explícito de los parámetros de calibración basados en tres zonas de calibración. Por lo tanto, en este documento solamente se describe este algoritmo de calibración. Las investigaciones de Hausner et al. (2011), Suárez et al. (2011b) y van de Giesen et al. (2012) presentan más detalles de algoritmos de calibración, tanto para mediciones “single-ended” como “double-ended”. 2.1.2.1 Calibración explícita de parámetros basada en tres zonas de calibración El procedimiento de calibración explícita de los parámetros , y C asume que la atenuación diferencial a lo largo del cable es uniforme, y se basa en la comparación de las temperaturas estimadas utilizando la ecuación (2.7) con las temperaturas medidas de manera independiente en zonas de referencia donde la temperatura es uniforme (Figura 2-5 (b)). Dado que existen tres parámetros que se deben encontrar, el algoritmo de calibración utiliza las temperaturas medias medidas de manera independiente en tres zonas de calibración para resolver simultáneamente un conjunto de tres ecuaciones lineales. Este conjunto de ecuaciones se obtiene a partir de la ecuación (2.7), evaluada en tres posiciones 𝑥𝑖∗ (punto medio de la zona de referencia “i”, con i = 1, 2, 3), las cuales tienen una temperatura Ti (Hausner et al., 2011): 𝐴̅𝑦⃗ = 𝑏⃗⃗. (2.10).
(40) 24. con: 1 ̅ 𝐴 = [1 1. −𝑇1 −𝑇2 −𝑇3. 𝑇1 𝑥1∗ 𝑇2 𝑥2∗ ] 𝑇3 𝑥3∗. (2.11). 𝛾 𝑦⃗ = [ 𝐶 ] 𝛥𝛼. (2.12). 𝑇1 𝑙𝑛{𝑅(𝑥1 )}∗ 𝑏⃗⃗ = [𝑇2 𝑙𝑛{𝑅(𝑥2 )}∗ ] 𝑇2 𝑙𝑛{𝑅(𝑥3 )}∗. (2.13). 𝑛𝑖. 1 𝑥𝑖∗ = ∑ 𝑥𝑗 𝑛𝑖. (2.14). 𝑗=1 𝑛𝑖. 1 𝑙𝑛{𝑅(𝑥𝑖 )}∗ = ∑ 𝑙𝑛{𝑅(𝑥𝑗 )} 𝑛𝑖. (2.15). 𝑗=1. donde ni es el número de mediciones dentro de la zona de calibración “i”. Si la matriz 𝐴̅ es no singular, su inverso puede ser utilizado para calcular explícitamente los valores de , y C. Para que la matriz 𝐴̅ sea invertible, es necesario que las temperaturas T1, T2 y T3 incluyan al menos dos temperaturas diferentes. Para puntos de calibración que están lo suficientemente lejos, esta condición es suficiente (Hausner et al., 2011). Los sistemas FO-DTS pueden ser calibrados de manera estática o de manera dinámica. Una calibración estática se basa en un conjunto único de parámetros de calibración, los que son definidos a partir de datos tomados en un intervalo inicial de integración. Esta calibración asume que los parámetros no cambian en el tiempo, y aplica estos parámetros a todas las mediciones realizadas. Por otro lado, una calibración.
(41) 25. dinámica actualiza los parámetros de calibración en cada uno de los instantes en que se realizan las mediciones, lo que minimiza desviaciones asociadas a calibraciones estáticas (Hausner et al., 2011). 2.1.2.2 Métricas de evaluación de los datos calibrados Una vez calibrados los datos es importante establecer su exactitud y precisión, las cuales se pueden evaluar si es que se tienen mediciones independientes de temperatura en una zona de referencia que no haya sido utilizada para calibrar el perfil de temperaturas. En este trabajo, se utilizaron el sesgo medio (MB – “mean bias”) y la raíz del error cuadrático medio (RMSE) como las métricas de evaluación de los datos calibrados. El sesgo medio se define como (Hausner et al., 2011): 𝑚. 𝑛. 1 𝑀𝐵 = ⌈∑ ∑(𝑇𝑗 − 𝑇)⌉ 𝑛 𝑘. (2.16). 𝑗. donde n es el número de mediciones independientes de temperatura en cada zona de referencia, Tj son las mediciones de temperatura realizadas por el sistema FO-DTS en las m zonas de referencia y T son las mediciones independientes de temperatura. Por otro lado, la raíz del error cuadrático medio se define como (Bennett et al., 2013): 𝑛. 1 2 𝑅𝑀𝑆𝐸 = √ ∑(𝑇𝑗 − 𝑇) 𝑛. (2.17). 𝑗=1. Es importante notar que la exactitud y precisión de las mediciones independientes de temperatura finalmente limitará la exactitud y precisión de las mediciones de los datos calibrados. Además, para evaluar la calidad de los datos calibrados se requieren al.
(42) 26. menos cuatro zonas de referencia (o de temperatura conocida): tres zonas para calibrar los datos y una zona para validarlos. En estas zonas es suficiente contar con dos temperaturas distintas. El RMSE de la zona de validación permite evaluar el ruido del instrumento FO-DTS, y el MB de la zona de validación revela cualquier error sistemático de los datos calibrados (Hausner et al., 2011). 2.2. Medición del contenido de humedad utilizando pulsos de calor La aplicación de pulsos de calor ha sido ampliamente utilizada para la. determinación de las propiedades térmicas del suelo, del contenido de humedad () y del movimiento de agua en el suelo (Bristow et al., 1993, 1998; Campbell et al., 1991; Tarara et al., 1997). Estudios de laboratorio y de campo indican que estos métodos ofrecen ventajas como: bajo costo, menor perturbación del suelo, y lecturas automáticas y frecuentes. Sin embargo, tienen la desventaja de ser métodos de medición puntual (Ren et al., 2003). 2.2.1. Métodos de sondas individuales y de múltiples sondas Los métodos de pulsos de calor se basan en la aplicación de un pulso de energía al. suelo que provoca un cambio de temperatura, la cual es medida por uno o más sensores (Bristow et al., 1994). La tasa de transmisión radial de calor depende de la densidad aparente del suelo, de la mineralogía, de la forma de las partículas y, principalmente, del contenido de agua en el suelo (Jury y Horton, 2004). Los métodos de pulsos de calor donde las observaciones térmicas son realizadas solamente con un sensor cerca de la fuente de calor, se denominan métodos de sondas individuales (Shiozawa y Campbell, 1990; Bristow et al., 1994), mientras que los métodos donde las observaciones térmicas se realizan con más de un sensor en la vecindad de la fuente de calor se les denomina métodos de múltiples sondas (Larson, 1988; Campbell et al., 1991; Bristow et al., 1993,.
(43) 27. 1994; Heitman et al., 2003; Ren et al., 2003, 2005). En ambos métodos, las propiedades térmicas del suelo se calculan a partir de la respuesta de éste a los pulsos de calor, a través de la resolución de la ecuación radial de conducción de calor (Carslaw y Jaeger, 1959; Jury y Horton, 2004). Estos métodos asumen que un pulso de calor de duración tf es aplicado por una fuente infinitamente larga en un medio homogéneo e isotrópico, que inicialmente se encuentra a una determinada temperatura. La variación de temperatura, T (°C), a una distancia r (m) de la fuente, está dada por (de Vries y Peck, 1958; Shiozawa y Campbell, 1990; Bristow et al., 1994): 𝑞′ −𝑟 2 ∆𝑇(𝑟, 𝑡) = 𝐸𝑖 ( ) 4𝜋𝐷𝑇 𝜌𝑐 4𝐷𝑇 𝑡 ∆𝑇(𝑟, 𝑡) =. 𝑞′. 4𝜋𝐷𝑇 𝜌𝐶𝑝. [𝐸𝑖 (. −𝑟 2 4𝐷𝑇 (𝑡−𝑡𝑓 ). −𝑟 2. ) − 𝐸𝑖 (. 4𝐷𝑇 𝑡. )]. 0 < 𝑡 ≤ 𝑡𝑓. (2.18). 𝑡 > 𝑡𝑓. (2.19). donde 𝑞 ′ (J m-1 s-1) es la energía aplicada por la fuente, 𝜌 (kg m-3) es la masa específica del medio, Cp (J kg-1 °C-1) es el calor especifico del medio poroso, 𝜆 (W m-1 °C-1) es la conductividad térmica, 𝐷𝑇 = 𝜆⁄𝜌𝐶𝑝 (m2 s-1) es la difusividad térmica, y Ei denota la integral exponencial. La minimización de la suma de los cuadrados de los errores entre la variación de temperatura medida experimentalmente y la estimada a partir de las ecuaciones (2.18) y (2.19) permite determinar las propiedades térmicas del suelo, las que pueden ser correlacionadas con el contenido de humedad. Muchas de las investigaciones pasadas se han centrado en determinar , Cp y DT a partir de la respuesta térmica de un suelo a un pulso de calor (Bristow et al., 1994; Welch et al., 1996; de Vries, 1952), para luego encontrar el contenido de humedad a partir de modelos como los presentados por Johansen (1975) o Campbell (1985) (Figura 2-6)..
Figure
+7


Documento similar
La Normativa de evaluación del rendimiento académico de los estudiantes y de revisión de calificaciones de la Universidad de Santiago de Compostela, aprobada por el Pleno or-
De este modo se constituye un espacio ontológico y epistemológico a la vez, en el que cada elemento (cada principio) ocupa un lugar determinado en la totalidad, y desde ahí está
De acuerdo con el concepto de superficie específica, se podrían esperar mayores contenidos de humedad para suelos de grano pequeño que para suelos de grano grueso, siendo iguales sus
a) Existen métodos rápidos para determinar la humedad de granos comerciales, los cuales se basan en diferentes principios, tales como medida de la
En diciembre 2020, se realizó el primer muestreo de lombrices y raíces a la vez que se tomaron muestras para determinar humedad y contenido de N en suelo en
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
De hecho, este sometimiento periódico al voto, esta decisión periódica de los electores sobre la gestión ha sido uno de los componentes teóricos más interesantes de la
El objetivo del presente estudio es identificar las prácticas y el conocimiento sobre el almacenamiento de medicamentos que tienen los habitantes del barrio La
