Diseño e Implementación de un Prototipo de Escáner Automotriz, con Visualización de Datos en Tiempo Real y Cálculo de Parámetros Indicados y Efectivos de un Motor de Combustión Interna
170
0
0
Texto completo
(2) Certifico que el presente trabajo fue desarrollado por PEREIRA SALAZAR ROBERTO PATRICIO bajo mi. _____________________ ING. IVAN ZAMBRANO O.. _____________________ ING. JORGE MARTINEZ C.. i.
(3) Nosotros,. declaramos bajo juramento que el. presentado para. mos derechos de propiedad. intelectual correspondiente a este trabajo, a la por la normativa institucional vigente.. _____________________. _____________________ Pereira Salazar Roberto Patricio. ii.
(4) DEDICATORIA A Lalita, Anibital, Luchito y Marco Gabriel, por ser mi respaldo, llenarme de bendiciones,. en mi vida.. incondicional han sido la piedra angular de mi vida, han sabido inculcar cualquier adversidad que se presente en el camino.. uto, durante todo este proceso, por estar a mi lado en todo momento gracias.. por nunca. su. incondicionalidad por vencido.. A toda mi familia y amigos porque con sus plegarias, consejos y palabras. es de mi vida.. iii.
(5) DEDICATORIA. , mi Panchito y Patito Baez. A mi padre, quien siempre ha estado a mi lado en cada paso que he dado;. A mi madre, gran consejera y amiga; siempre has estado a mi lado en cada. Quienes con palabras de aliento han logrado que en mi crezcan las ganas de lograr cosas que parecen imposibles y que a su vez van a llenar de. A ustedes les dedico el producto de mi esfuerzo, por ser mi ejemplo e. Roberto Patricio Pereira Salazar. Mat Fraser. iv.
(6) AGRADECIMIENTO Quiero expresar mi gratitud a Dios, por estar conmigo en cada instante y brindarme la tenacidad para superar cualquier infortunio.. Al D. por vencido.. Del mismo modo, mi agradecimiento a mis padres, por hacer de mi quien soy. proceso.. mi mentor, y mi amigo.. Y a mis amigos que de una forma u otra forman parte de este logro.. v.
(7) AGRADECIMIENTO En primer lugar, a Dios por guiarme y protegerme siempre.. A mis padres, Patricio y Margarita, gracias por confiar en. y apoyarme en cada. uno de los pasos que he dado para conseguir las metas que me he planteado. El amor y respeto que siento por ustedes es infinito, y le agradezco a Dios por permitirme ser su hijo.. nde que tengo en la recorrer.. A mi enamorada, Karen, por estar a mi lado en este camino, y con amor y paciencia ser incondicional cada momento que lo he necesitado.. Mi mejor amigo,. Mis amigos, Christian, Jean, Ricardo, Marco, Jair y Ramiro, quienes han estado momento.. conseguir cada objetivo que me he propuesto.. Roberto Patricio Pereira Salazar vi.
(8) ................................................................................................. x ................................................................................................. xii ........................................................................................ xiv ........................................................................................................ 1 Objetivo General ................................................................................................ 3 ......................................................................................... 3 Estado Del Arte .................................................................................................. 4 1.. .................................................................................. 7. 1.1.. OBDII ....................................................................................................... 7. 1.2.. Protocolos de. ................................................................... 8. ISO 9141-2 ..................................................................................... 9 ISO 14230-4 ................................................................................... 9 ISO 15765-4 ................................................................................... 9 SAE J1850 .................................................................................... 10 1.3.. DLC ....................................................................................................... 11 ................. 12. 1.4.. ......................................... 13 ............................................................... 13 ..................................................... 15 ................................................. 16. 1.5. 2. 2.1.. Rendimiento de combustible ................................................................. 24 .................................................................................... 25 .......................................................................... 25. 2.1.1.. Necesidades por satisfacer .......................................................... 25. 2.1.2.. Benchmarking ............................................................................... 26. 2.1.3.. Casa de la calidad ........................................................................ 28 vii.
(9) 2.1.4. 2.2.. Especificaciones del prototipo ...................................................... 30 ................................................................... 31. 2.2.1.. prototipo ............................................... 31. 2.2.2.. ..................................................................... 35. 2.2.3.. ....................................................................... 39. 2.3.. ................................................. 40. 2.4.. .................................................................... 41. 2.4.1.. ................................................. 42. 2.4.2.. .......................................................... 55. 2.5.. Montaje de prototipo .............................................................................. 61. 2.6.. Procedimiento de Montaje ..................................................................... 62. 2.7.. .................................................... 63. 2.8.. ......................................................................... 64. 3. 3.1.. .............................................................. 65 Resultados............................................................................................. 65. 3.1.1.. Prueba de funcionamiento prototipo. .......... 65. 3.1.2.. Prueba de funcionamiento de prototipo. real. ..................................................................................................... 69. 3.1.3.. Prueba de funcionamiento. 3.1.4.. Prueba de funcionamiento. Flujo de datos en tiempo. ..... 70. ................................................. 73 3.1.5. 3.2.. Prueba de funcionamiento. ........................ 78. ............................................................................................... 79. 3.2.1.. -. ............................. 79. 3.2.2.. - Flujo de datos en tiempo real ............. 80. 3.2.3.. -. ........ 81. 4.. CONCLUSIONES Y RECOMENDACIONES ......................................... 93. 4.1.. Conclusiones ......................................................................................... 93 viii.
(10) 4.2.. Recomendaciones ................................................................................. 95 ................................................................................................ 96. Anexos ............................................................................................................. 99 Anexo 1: Encuestas ......................................................................................... 99 Anexo 2: Comandos AT ................................................................................. 103 SparkFun OBD II - UART..................... 107 ..................................................................... 116 ............................. 132 ...................................................................... 135 Anexo 7: Manuales de funcionamiento .......................................................... 145 Anexo 8: Certificados CCICEV ....................................................................... 152. ix.
(11) ndice de figuras Figura 1. Pines utilizados por Protocolo ISO 9141-2 & KWP2000. .................... 9 Figura 2. Pines utilizados por Protocolo CAN................................................... 10 Figura 3. Pines utilizados por Protocolo J1850 VPM. ....................................... 11 Figura 4. Pines utilizados por Protocolo J1850 PWM....................................... 11 Figura 5. Terminales del DLC........................................................................... 12 ................ 13 Figura 7. Diagrama indicador de un motor de 4 tiempos. ................................. 16 Figura 8. Diagrama p - V. Ciclo Otto. ............................................................... 17 .................................. 22 Figura 10. Autel MaxiSys. MS906. ................................................................. 28. Figura 11. Carman i100. ................................................................................... 28 Figura 12. Launch X431 PAD II. ....................................................................... 28 Figura 13. QFD................................................................................................. 29 Figura 14. SparkFun OBD-II UART. ................................................................. 34 Figura 15. Arduino Due. ................................................................................... 38 Figura 16. Ejemplo tipo de dato........................................................................ 45 Figura 17. Programa de Arduino. ..................................................................... 46 .................................................... 50 ........................................................................ 52 ............................................ 54 ............................................... 57 .................................. 58 ..................................................... 58 Figura 24. Interfaz gr. ................................................ 59 ............................. 59. Figura 26. Diagrama de desplazamiento entre interfaces. ............................... 60 Figura 27. DB9. OBDII. .................................................................................. 61. Figura 28. Sparkfun OBD II. UART. ............................................................... 61. Figura 29. Arduino DUE. .................................................................................. 61 Figura 30. Prototipo ensamblado. .................................................................... 62 Figura 31. Diagrama de montaje de prototipo. ................................................. 63 Figura 32. Prototipo final. ................................................................................. 63 x.
(12) ................................................................... 64 ...................................................................... 65 ..................................................................... 65 prototipo. ............................................................ 66 ............................................................. 66 ................................................................ 67 Figura. prototipo. ...................................................... 67 prototipo. .............................. 68 ............................... 68. Figura 42. Lectura de flujo de datos. prototipo. .............................................. 69. Figura 43. Lectura de flujo de datos. ............................................... 69. Figura 44. Ruta planificada............................................................................... 70 Figura 45. Curva de Torque y Potencia. ........................................................... 72 ........................................................................ 73 ................................................................. 73 Figura 48. Resultado prototipo. ........................................................................ 73 ...................... 74 ...................... 76 ........................................................................ 78 .......................................................................................... 78 ................................................................ 81 prueba 1. ............................................ 82 - prueba 1.................................................. 82 - prueba 2. ............................................. 83 - prueba 2.................................................. 83 potencia. ................................. 85 potencia. .......... torque. .................................... 88 torque. .......................................................... 89 ........................................................................ 91. xi.
(13) ndice de tablas Tabla 1. Protocolos automotrices por fabricante. .............................................. 8 ............................................... 12 Tabla 3. Nomenclatura diagrama motor 4 tiempos. .......................................... 17 Tabla 4. Nomenclatura figura 8. ....................................................................... 18 Tabla 5. Nomenclatura figura 9. ....................................................................... 22 .................................... 26 Tabla 7. Especificaciones de prototipo. ............................................................ 30 Tabla 8. Sistemas del prototipo. ....................................................................... 30 Tabla 9. Subsistemas del prototipo. ................................................................. 31 ................. 32 ..... 32 ....................................... 33 ......................................................................................................................... 33 Tabla 14. Alternativas microcontrolador. .......................................................... 35 .................................. 36 ....................................... 37 ............................ 37 Tabla 18. Arduino Due. .................................................................................... 38 .................................................. 39 ........................................... 40 Tabla 21. Modos de protocolo OBD. ................................................................ 42 Tabla 22. Cadena de caracteres. ..................................................................... 43 Tabla 23. Modo 01. .......................................................................................... 43 Tabla 24. Modo 03. .......................................................................................... 44 Tabla 25. Modo 04. .......................................................................................... 44 Tabla 26. Funciones del prototipo. ................................................................... 45 .................................................. 47 .............................................. 55 Tabla 29. Requisitos del sistema...................................................................... 63 prototipo. ........................................... 71 ................................................. 75 xii.
(14) Tabla 32. Datos de prototipo - prueba 1. .......................................................... 75 ................................................. 77 Tabla 34. Datos de prototipo - prueba 2. .......................................................... 77 Tabla 35. Rendimiento - prueba de laboratorio. ............................................... 79 Tabla 36. Consumo. prototipo. ....................................................................... 79. Tabla 37. Respuesta de equipos. .................................. 80. Tabla 38. Respuesta de equipos. flujo de datos............................................. 80. Tabla 39. Valores promedio de potencia. ......................................................... 84 Tabla 40. Valores promedio de torque. ............................................................ 84 Tabla 41. Error porcentual. potencia. ............................................................. 86 potencia.................................................. 87. Tabla 43. Error porcentual. torque.................................................................. 89 torque. .................................................... 90. Tabla 45. Rendimiento. prototipo. .................................................................. 90. Tabla 46. Error porcentual. rendimiento ......................................................... 91 rendimiento. ........................................... 92. xiii.
(15) ndice de ecuaciones Vd. ........................................ 18 Vc. ........................................................... 18 mm. .............................................................. 18 P2. .............................................................. 18 T2. ...................................................... 18 - V2. ............................................................. 19 ma. ...................................................................... 19 mf. .......................................................... 19 Qin. .............................................. 19 T3. ................................................... 19 V3. ......................................................... 19 P3. ........................................................... 19 - T4. .......................................................... 20 P4. ................................................................. 20 V4. ............................................................... 20 - W 3-4. ............................................................ 20 W 1-2. ........................................................... 20 W i.................................................................. 20 W net. .................................................................... 20 i.. .............................................................. 21. Qin. ............................................................... 21 -. . ...................... 21. . ................................................... 22 . ................................................................. 23 Me. .......................................................... 23 -. . ............................................................. 23 -. ........................................................... 23 pme..................................................... 24 . ....................................................... 24. xiv.
(16) RESUMEN. El objetivo de este proyecto se centra. indicados y efectivos del motor; con el fin de facilitar y hacer interactivo el procedimiento, se desarrolla terfaz humano comerciales en nuestro medio, se procede forman debe cumplir, estos requerimientos se obtienen mediante la casa de la calidad (QFD); definiendo las principales funciones del datos; con el fin de cumplir los requerimientos necesarios se seleccionan las. desarrolla. a , que brinda fiabilidad a los resultados del es Vehiculares. (CCICEV. EPN),. nciones del prototipo se realiza. automotriz comercial, el equipo Autel MaxiSys MS906. Palabras Clave: Arduin. .. xv.
(17) ABSTRACT The main goal of this project focuses on the design of an automotive scanner prototype that allows communication with the engine control unit (ECU) of a vehicle, in order to receive data computer and mathematically generate the calculations of indicated and effective parameters of the engine. In order to facilitate and make the procedure interactive, an intuitive graphic interface is developed, based on the Gedis guide, generating in this way a correct design of the human machine interface. The design begins with an analysis of the main commercial scanners in our environment, proceeding with the selection of the elements that are part of it, based on the technical requirements that the prototype must comply; These requirements are obtained through the quality function deployment (QFD), defining the main functions of the prototype: Calculation of effective engine parameters, reading and deletion of fault codes and reading of data flow. In order cards are selected for data acquisition and interpretation. On the other hand, the visualization and the human machine interface are developed in PC in the Validation in the calculation function of engine parameters obtained by the prototype was performed with a calibrated and certified equipment in the country, which provides reliability to the results of the prototype presented. This equipment is the dynamometer of the Technological Transfer Center for Training and Research in Control of Vehicle Emissions (CCICEVEPN). In addition, the validation of the other functions of the prototype is carried out with the Autel MaxiSys MS906. Keywords: Arduino, CCICEV, scanner, parameters, Matlab, SparkFun.. xvi.
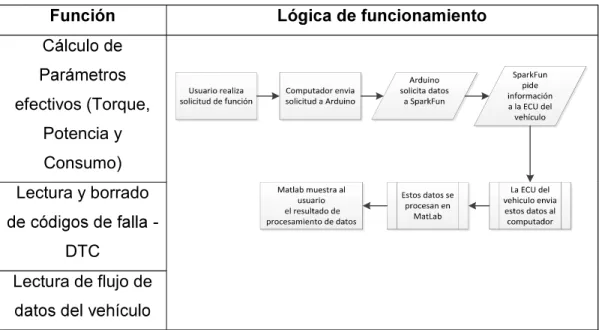
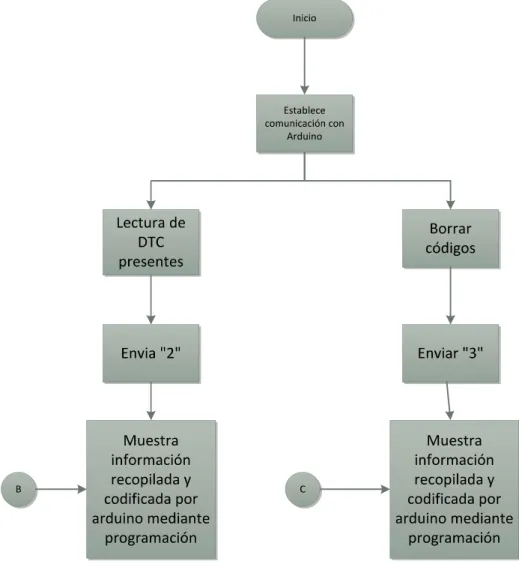
(18) ESC TIEMPO REAL. Ecuador requiere que se utilice. En. son sumamente escasos los lugares que poseen este equipo con. motor de encendido provocado (MEP), factores que son necesarios para que para obtenerlos es necesario usar. humana calibrac. en el equipo, de modo que a pesar de ser una prueba de la que se. obtienen presenta, dificultan la misma. en (DTC) de estos efectivos vos (MCIA) en tiempo real. 1. motor de.
(19) prototipo, seleccionado, la misma que se establece entre el prototipo y el conector de diagnosis del (DLC). A su vez se da. utilizados, y la. prog. tarjetas. procesamiento de datos,. estos y los procedimientos que la. misma conlleva igital. y ejecutada. en Windows. total. de los datos que ofrece la Unidad de Control de motor (ECU), es viable tener una idea del estado de los sensores actuadores y diferentes unidades de control , del mismo modo adquiriendo datos generados por los sensores es posible procesarlos y indicados y efectivos del motor, se realiza una prueba de ruta en la ciudad de Quito.. 2.
(20) Objetivo General. interna.. .. compatibilidad de su l. de falla y calcular potencia y torque el prototipo y Calcular mediante procesamiento m. , Torque. efectivo, Potencia efectiva y consumo de un motor. Generar c. Validar los datos obtenidos, y las curvas generadas con el prototipo d respectivamente.. 3.
(21) Estado Del Arte. interna. no. e. investigaciones parcialmente relacionadas se han llevado a cabo; por ejemplo 2013) investiga la influencia de la altura en el rendimiento del veh culo, con un. ,. En g prestaciones reales del e puede mencionar al encendido, entre otros.. basados en el microcontrolador ELM 327 debido a las ventajas en cuanto a y su compatible con distintos protocolos automotrices. Se elabora la interfaz con el usuario. En el 2013 (Wang, Ge, Yu, & Xiangyu, 2013), realizan un estudio referente a la altura afecta la densidad de aire, de modo que a mayor altura menor densidad lo ucida, las emisiones aumentaron costosa estaba provista de: un analizador de gases, un medidor de combustible, 4.
(22) el contenedor de un. eba. la potencia y el torque de un. obtuvo un intervalo de confianza , afectada 10% cada 1000 metros de altura.. de protocolos OBDII ELM327, un microcontrolador 18F4550, un teclado y una. , se genera el interfaz humano. m quina en un ordenador.. automotriz para Chevrolet Activo, Hyundai Tucson 2005 y Ford Explorer 2003, el. c. el dispositivo, y resolver el problema.. limitada del microcontrolador ELM y su incapacidad para acceder a protocolo CAN, desenvolvimiento que cualquier otro ELM327.. 5.
(23) motor,. Ecuador en el Centro de Transferencia. Vehiculares (CCICEV) se puede obtener mediciones certificadas de potencia y certificaciones de manten. monetaria elevada.. , (ECU).. automotriz, dado que, mediante un costo razonable, se puede determinar el e. culo en base a un flujo de datos de los. s. tiempo real en un ve mucho menor.. funciones las despliega un software intuitivo y amigable con el usuario basado interfaz humano Gedis).. 6.
(24) 1.. del monitoreo y diagn. , , a partir de 1996 cada. que sea. fabricado debe poseer un conector tipo OBD II y el mismo debe estar ubicado . Este sistema brinda la posibilidad de observar en tiempo real el funcionamiento de diversos sensores y actuadores presentes en el v posibilidad de diagnosticar los mismos. controlar y monitorear las emisiones de gases contaminantes, ya que dicho sistema tiene la posibilidad de informar al conductor mediante un testigo luminoso ubicado en el tablero de instrumentos MIL (Mal Function Indicator Light) en la cabina, (Morales & Valverde, 2010). verificando que lleven a cabo sus funciones de forma correcta todo esto con el fin de que el MCIA no genere emisiones contaminantes en exceso. (Morales & Valverde, 2010) Cabe recalcar. sistema OBD II es compatible con los diversos. protocolos que cada fabricante utiliza para la ECU que va a montar en sus. Todos los interprete l. programados de tal forma que la ECU reciba e les de los diferentes sensores del. 7.
(25) Un protocolo de comunicaci. es un conjunto de normas que deben cumplir. imposible. (Tarnok, 2013). palabras, os que intervienen se comunican, en la industria automotriz existen varios protocolos por cada requerimiento que presente la red. Un protocolo de gran importancia y utilidad en la interconexi (Controller Area Network). (Morales & Valverde, 2010) El protocolo CAN ofrece la ventaja de la velocidad con la que se establece la comu cuales son exactamente iguales, uno es espejo de otro. industria automotriz se muestran en la Tabla 1. Tabla 1. Protocolos automotrices por fabricante.. PROTOCOLO OBD ISO. 9141-2. FABRICANTE. /. japoneses incluyendo Alfa. KWP2000-4 2004, Kia, Land Rover, Mazda, Mercedes, Mitsubishi, Nissan, Peugeot, Renault, Saab, Skoda, Subaru, Toyota, Vauxhall, Volkswagen posterior al 2001, Volvo hasta 2004 J1850 PWM. Ford hasta 2003, Jaguar hasta 2003, Mazda hasta 2004.. J1850 VPW. General Motors, Chrysler. ISO 15765-4 (CAN). Ford, Mazda, Volvo desde 2004. (Fuente:. 8.
(26) ISO 9141-2 Este es un protocolo similar al RS-. bidireccional y unidireccional respectivamente. ISO 14230-4 En este protocolo. de velocidad que oscila entre 1200 -2. Las trama Figura 1.. Figura 1. Pines utilizados por Protocolo ISO 9141-2 & KWP2000. (Fuente:. ISO 15765-4 Este protocolo es conocido como Controller Area Network (CAN), fue cualquier protocolo aumento considerablemente hasta los 1Mbit/s o 1000000 baudios , de modo que se lo clasific en l por la cual a partir. , en. se ha ido 9.
(27) -4 . Figura 2.. Figura 2. Pines utilizados por Protocolo CAN. (Fuente:. SAE J1850. velocidad baja. (VPM) y de velocidad media (PWM) posee dos capas, la ca. capa de enlace. .. 1.1.1.1 VPW. protocolo de Ge . Figura 3.. 10.
(28) Figura 3. Pines utilizados por Protocolo J1850 VPM. (Fuente:. 1.1.1.2 PWM. protocolo lo utiliza Ford y consigue una velocidad de 41,6kbit/s y utiliza dos cables para transmitir en modo diferencial. . Figura 4.. Figura 4. Pines utilizados por Protocolo J1850 PWM. (Fuente:. El. o Diagnostic Link. Connector, conocido como puerto DLC, en un de 16 pines; de los cuales se utiliza algunos con el fin de establecer la y la ECU del protocolo automotriz se utilizan los 16 pines.. 11.
(29) , podremos notar la ausencia de pines en alguno de los orificios del DLC 5.. Figura 5. Terminales del DLC. (Fuente:. de acuerdo con el , Tabla 2.. Tabla 2.. .. (Fuente: Tarnok, 2013). de falla en los diferentes protocolos. , , Sistemas del chasis. , Comunicaciones de la red. , 12. . Figura.
(30) corresponden al tipo (Tarnok, 2013).. terna ya tienen un importante grado de madurez, no existe una nomenclatura aceptada , posiblemente porque su desarrollo se ha realizado por por lo que . (Payri & Desantes, 2011).. importantes del motor, incluyen. funcionamiento, tanto en lo que se refiere a prestaciones como a emisiones (Payri & Desantes, 2011). Se toma como referencia a la Figura 6.. Figura 6.. . (Fuente: Payri & Desantes, 2011). 13.
(31) (Payri & Desantes, 2011). : junto con la (D). :. se mueve entre dos posiciones extremas,. denominados punto muerto superior (PMS) e inferior (PMI), la carrera es la distanci. s extremas de su. desplazamiento. (S). : en. . (S/D). Longitud de la manivela: longit. el codo de biela,. este es el elemento que da lugar a de la biela en un giro. . (l). Longitud de la biela: es una barra articulada en sus extremos, la biela une el (L), de forma que transmite el se desplaza dentro del cilindro. (Ap =. 2/4). Cilindrada unitaria: volumen que existe en el desplazamiento desde el punto (VD = ApS). se la. entre el volumen .. apertura y cierre i. menor. entre l. lvulas. puesta en marcha. tiene lugar mediante un sistema de levas, por lo que realizar un levantamiento paulatino para evitar aceleraciones excesivas que puedan poner en peligro las resulta necesario, o deceleraciones excesivas que puedan producir el despegue de las mismas del mecanismo que las acciona y con ello producir ruido, vibraciones y desgaste prematuro. N mero de cilindros:. (Motor de MCIA pueden estar constituidos por uno o varios. 14.
(32) desfase entre ellos. ionamiento. funcionamiento, poseen definen el estado operativo del motor a partir de variables que pueden medirse experimentalmente y sobre las que actuar el sistema de control del motor para fijar el punto de funcionamiento requerido (Payri & Desantes, 2011). un motor que permiten definir su estado operativo a partir de variables experimentales son (Payri & Desantes, 2011): N unidad de tiempo y determina la periodicidad de entrada al sistema. Este es uno de los grados de libertad del motor para dar potencia, generalmente se lo mide en revoluciones por minuto [rpm]. Grado de carga: cuantifica lo que proporciona el motor comparado con el ofrecer. Se suele aplicar al par en el eje, a la potencia e incluso al caudal de combustible aceptado por unidad de tiempo, habitualmente en [g/s]. Los motores fundamentan su almacenada. considera de 44 300 [kJ/kg]. L. real es un. [kPa]. 15.
(33) indicados y efectivos P. , . Considerando que el origen de la ejercido po. c. los que se calculan en base a condiciones los disponibles en valorar el funcionamiento de l rendimiento, potencia, y. emisiones, claves a la hora de comparar motores o estr (Payri & Desantes, 2011). 1.4.3.1. El diagrama de indicador. , este diagrama de un solo cilindro,. a lo. (Payri &. Desantes, 2011). Figura 7.. Figura 7. Diagrama indicador de un motor de 4 tiempos. (Fuente: Payri & Desantes, 2011). 16.
(34) Donde: Tabla 3. Nomenclatura diagrama motor 4 tiempos.. Vc VD. Cilindrada unitaria. AE. Apertura de escape. PMIes. Punto muerto inferior escape. PMIad PMS. Punto muerto superior. (Fuente: Pulkrabek, 1997). presentado. Para lograrlo, en primera instancia se debe pertinentes que permiten conseguir este fin, para eso se debe considerar un ciclo de volumen constante, como se observa en la Figura 8. Se considera un ciclo Otto. prueba trabaja. al poseer un motor de gasolina de 4 tiempos. Volumen en ciclo Otto. Figura 8. Diagrama p - V. Ciclo Otto. (Fuente: Payri & Desantes, 2011). 17.
(35) Donde: Tabla 4. Nomenclatura figura 8.. P V. Volumen. Qa. Calor de entrada. Qc. Calor de salida. (Fuente: Payri & Desantes, 2011). 1.4.3.1.1. 1. Volumen desplazado por cilindro. Vd.. (Fuente: Pulkrabek, 1997). 2. Volumen comprimido. Vc.. (Fuente: Pulkrabek, 1997). 1.4.3.1.2.. Figura 8 3. Masa de la mezcla. mm.. (Fuente: Pulkrabek, 1997). 1.4.3.1.3.. Figura 8 4.. P2.. (Fuente: Pulkrabek, 1997). 5. Temperatura de punto 2. (Fuente: Pulkrabek, 1997). 18. T2..
(36) 6. Volumen de punto 2 - V2.. (Fuente: Pulkrabek, 1997). 1.4.3.1.4. Considerando un 0% de residuo de la. , lo que se conoce como una. completa, se puede conocer la masa de combustible y la masa de aire que son parte del ciclo: 7. Masa del aire. ma.. (Fuente: Pulkrabek, 1997). 8. Masa del combustible. mf.. (Fuente: Pulkrabek, 1997). 1.4.3.1.5.. Figura 8 9. Calor que ingresa al sistema. Qin.. (Fuente: Pulkrabek, 1997). 10. Temperatura del punto 3. T3.. (Fuente: Pulkrabek, 1997). 11. Volumen del punto 3. V3.. (Fuente: Pulkrabek, 1997). 12.. P3.. (Fuente: Pulkrabek, 1997). 19.
(37) 1.4.3.1.6.. Figura 8 13. Temperatura punto 4 - T4.. (Fuente: Pulkrabek, 1997). 14.. P4.. (Fuente: Pulkrabek, 1997). 15. Volumen punto 4. V4.. (Fuente: Pulkrabek, 1997). 1.4.3.1.7. 16. Trabajo producido - W 3-4.. (Fuente: Pulkrabek, 1997). 17. Trabajo absorbido. W 1-2.. (Fuente: Pulkrabek, 1997). 1.4.3.1.8. Trabajo indicado inferiores de ad) y de escape (PMles): 18. Trabajo indicado. W i.. (Fuente: Pulkrabek, 1997). resultado de calcular el trabajo neto del ciclo. 19. Trabajo neto. (Fuente: Pulkrabek, 1997). 20. W net..
(38) Es un trabajo positivo generado por los. 1.4.3.1.9. Potencia indicada Corresponde al trabajo indicado por unidad de tiempo. Puede calcularse, potencia en un cilindro o bien al motor completo; el trabajo W es la suma de los trabajos de todos los cilindros. Para un solo cilindro tenemos: 20. Potencia indicada. i.. (Fuente: Pulkrabek, 1997). y n es una constante de valor 2, para motores de 4 tiempos. 1.4.3.1.10.. Rendimiento indicado. mica del combustible, sin embargo, para el caso experimental, se calcula. 21. Calor entregado. Qin.. (Fuente: Pulkrabek, 1997). En donde: QHV. c. 22.. -. (Fuente: Pulkrabek, 1997). 1.4.3.1.11. Es. es la eficiencia de la. (pmi) constante y que. un trabajo igual al trabajo indicado. Figura 9.. 21. ..
(39) Figura 9.. . (Fuente: Payri & Desantes, 2011). Donde: Tabla 5. Nomenclatura figura 9.. p V. Volumen. VD. Cilindrada unitaria. Wi. Trabajo indicado. pmi. indicada. (Fuente: Payri & Desantes, 2011). 23.. media indicada. .. (Fuente: Pulkrabek, 1997). 1.4.3.2. Se refieren al eje del motor y por tanto incluyen el ciclo cerrado, el bombeo y las Por lo que es recomendable considerar una encuentre en condicione. Son habituales los que se. mencionan. 22.
(40) 1.4.3.2.1. Potencia efectiva imen de giro N. L. de 24. Potencia efectiva. .. (Fuente: Pulkrabek, 1997). 1.4.3.2.2. Par/Torque efectivo su eje hacia el dica la capacidad tractora que brinda. 25. Par/Torque efectivo. Me.. (Fuente: Pulkrabek, 1997). 1.4.3.2.3. Trabajo efectivo El trabajo efectivo es el trabajo. . 26. Trabajo efectivo -. .. (Fuente: Pulkrabek, 1997). 1.4.3.2.4. Rendimiento efectivo . 27. Rendimiento efectivo -. .. (Fuente: Pulkrabek, 1997). 1.4.3.2.5. trabajo indicado. El rendimiento mec Generalmente. Sin embargo, se. recomienda trabajar con un rendimiento de 0.85 en casos experimentales. 23.
(41) 1.4.3.2.6. (pme), como una igual al trabajo efectivo. 28.. pme.. (Fuente: Pulkrabek, 1997). Se puede definir el rendimiento de combustible como la cantidad de combustible que se requieren para generar el distancia. Generalmente viene dado por [gr/km], [ml/kg] o incluso en [l/100km]. alternativo tiene muchas variables que inciden directamente en el rendimiento. Los factores ambientales Camber Caster El cilindraje del motor eno n De forma experimental, se puede evaluar la eficiencia de un motor calculando el consumo. 29. Consumo e. (Fuente: Pulkrabek, 1997). 24. ..
(42) 2.. de las necesidades que actualmente presenta el diagn stico automotriz, en base a estas necesidades se desarrolla una casa de la calidad (QFD), con el fin de desarrollar un prototipo que satisfaga las mismas.. presentes en el mercado, para desarrollar un prototipo competitivo que sea. lisis se establecen las. 2.1.1. Necesidades por satisfacer Se realizan encuestas a dos personas especialistas en la rama automotriz, para que ellos basados en su conocimiento y pericia dentro del. rea automotriz. ecuatoriana, indiquen cuales son las necesidades que ellos desean satisfacer en sus talleres. Los dos especialistas en el. seleccionados son: el Ing. Jorge. y el Ing. Fernando Robles, M.Sc. los dos poseen una. , M.Sc. en sistemas. automotrices MC Taller Automotriz , por lo cual es una persona que posee mucha experiencia y especialista en En el Anexo 1 se observa las encuestas realizadas, con las cuales se establece las siguientes necesidades:. Leer flujo de datos en tiempo real Interfaz de usuario amigable. 25.
(43) 2.1.2. Benchmarking Para el desarrollo del prototipo propuesto, es el uso en talleres particulares de la ciudad de Quito. Los principales modelos que se comercializan son: Autel MaxiSys - MS906 Carman i100 Launch X431. Tabla 6. Tabla 6.. s.. Autel. MaxiSys. Carman. MS906 (Autel, 2017) TM. Sistema. Android. Operativo. KitKat. i100 Launch. (Carman, 2015). 4.4.2, Windows. X431. (Launch, 2017) XP, Android 5.1. Windows. Vista,. Windows. 7,. Windows 8 Procesador. Samsung Exynos 6. Cortex M3 120 Mhz CPU. Core (1.3 GHz quad-. 2.0. GHz,. octacore. core ARM cortex A7 + 1.7 GHz dual-core ARM Cortex Memoria. A15). 2 GB RAM & 32 GB 2 GB RAM & 32 GB 2 GB RAM & 64 GB ROM. ROM. Pantalla. 7.5. ROM pulgadas, 10.1. pulgadas,. capacitiva LED de 8.0 pulgadas Conectividad. Wi. con 1440x1080. Fi. Bluetooth V2.0. DB16 DLC. USB 2.0. Usb 2.0 Tarjeta SD (hasta 32 GB). 26. 1920x1200 Wi. Fi.
(44) Trasera. de. 8.0 No aplica. linterna Sensores Sensor. de. Frontal. 2. trasera. 5. No aplica. No aplica. No aplica. No aplica. Luz. Ambiental Salida/Entrada Audio. Altavoz sencillo de. Litio. 3.7V/5000 de Litio 2100mAh 1 mAh / celda de. mAh de. celda. poder. de. 3.7V. 12 VAC/DC. VAC/DC Voltaje. de Corriente. entrada Consumo. 12V (9. continua Corriente continua Corriente continua. 35V). de 5W. 12V. 12V. 2.4W. 9W. -. -. Temperatura de funcionamiento Temperatura de almacenamiento Dimensiones. 270.8 mm x 176.0 60 mm x 130 mm x 85 mm x 42 mm x mm x 36.0 mm. 27 mm. 18 mm. Peso. 0.93 kg. 180 g. 100 g. Protocolos. ISO. 9142-2,. ISO ISO 9142-2, ISO ISO 9141, J1850. 14230-2, ISO 15765- 14230-2, 4,. K-Line,. LLine, 15765-4,. ISO PWM, J1850 VPW, SAE- ISO 14230-4, SCI,. Flashing Code, SAE- J1850, SAE-J1850 CCD J1850 VPW, SAE- PWM J1850. PWM,. ISO. CAN CAN ISO 11898, 11898, Highspeed,. Highspeed,. Middlespeed,. Middlespeed,. Lowspeed. Lowspeed. and Singlewire CAN. 27. and.
(45) Singlewire CAN, GM K/L-Line. High. UART, UART Echo Speed. Serial,. Byte Protocol, Honda Flashing. Code,. Diag-H Protocol, TP Ethernet Protocol 2.0, TP 1.6, SAE Byte. Protocol,. J1939, SAE J1708, Honda. Diag-H. Fault-Tolerant CAN. Protocol,. KWPT. 1281,. TP2.0,. TP1.6, J2610(Chrysler SCI). *. J2534. Available (2017) Imagen. Figura 11. Carman i100. (Fuente: Carman, 2015). Figura 10. Autel MaxiSys MS906. (Fuente: Autel, 2017). Figura 12. Launch X431 PAD II. (Fuente: Launch, 2017). (Fuente: Andrade & Pereira, 2018). 2.1.3. Casa de la calidad En base a los apartados 2.1.1 y 2.1.2 se lleva a cabo la matriz conocida como la Figura 13.. 28.
(46) (Fuente: Andrade & Pereira, 2018). 29. Figura 13. QFD..
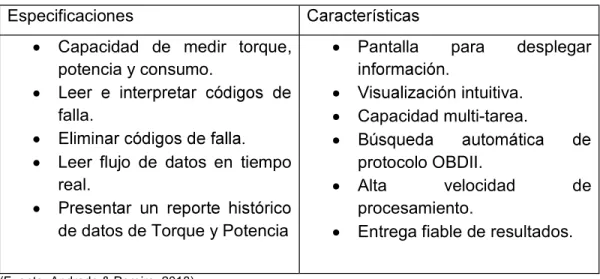
(47) 2.1.4. Especificaciones del prototipo , las. s. que debe poseer el prototipo se observan en la Tabla 7: Tabla 7. Especificaciones de prototipo.. Especificaciones Capacidad de medir torque, potencia y consumo.. Pantalla. para. desplegar. intuitiva. Capacidad multi-tarea.. falla. Leer flujo de datos en tiempo real. de datos de Torque y Potencia. protocolo OBDII. Alta velocidad de procesamiento. Entrega fiable de resultados.. (Fuente: Andrade & Pereira, 2018). ecer que el prototipo al igual que sus competidores debe poseer dos sistemas que deben ser analizados por separado, como se observa en la Tabla 8. Tabla 8. Sistemas del prototipo.. Sistema. Condiciones del sistema. Sistema permita diagn stico por USB. de datos. Sistema de control. . Interfaz con usuario amigable.. (Fuente: Andrade & Pereira, 2018). En base a los sistemas y las condiciones se puede reconocer que el prototipo debe constar de distintos subsistemas, como se observa en la Tabla 9.. 30.
(48) Tabla 9. Subsistemas del prototipo.. Sistema. Subsistema prototipo. .. Control. . .. (Fuente: Andrade & Pereira, 2018). la comunicaci. el. lo de prueba y el prototipo, y a su vez interpretar entrega.. que cumplan con cada una de las funciones. A priori, se puede considerar que. poder visualizar los resultados de las diferentes funciones que realiza el prototipo. 2.2.1.. prototipo. importancia. Sin embargo, se plantea que el prototipo pueda no solo trabajar con ctible poder probar el funcionamiento de este en varios. de tipo serial, que consiste en enviar microcontrolador que se emplee. Para poder resolver este particular, se presentan las alternativas de las posibles que cumplan con el objetivo en la Tabla 10.. 31.
(49) Tabla 10. Alternativas. .. Alternativas Dispositi A. Freematics OBD-II I2C Adapter. B. SparkFun OBD-II UART. C. Seeed Studios CAN-BUS. (Fuente: Andrade & Pereira, 2018). Una vez que se han establecido las posibles alternativas, se deben considerar Tabla 11. Tabla 11.. .. Criterio I. Facilidad de montaje. 20%. II. Bajo Costo. 15%. III. 25%. IV. Disponibilidad. 15%. V. Mayor cobertura de protocolos vehiculares. 25%. Total. 100%. (Fuente: Andrade & Pereira, 2018). rototipo. Facilidad de montaje Es un montaje dificultoso puede generar problemas en el ensamblaje del prototipo. Bajo costo El costo es un fa. 32.
(50) Compatibilidad con c El microcontrolador y la ECU deben comunicarse con este elemento, por lo que se requiere de. Disponibilidad. del prototipo, resulta fundamental para el desarrollo de este trabajo. Mayor cobertura de protocolos vehiculares Es necesaria, con el fin de poder escoger de manera correcta el. de. prueba del prototipo, esto asegura la calidad de los datos recibidos desde la ECU. Conociendo los criterios de sel cuantificar el cumplimiento de cada alternativa, Tabla 12. Tabla 12.. .. Cuantitativa No cumple. 1. Cumple parcialmente. 3. Si cumple. 5. (Fuente: Andrade & Pereira, 2018). Se asigna uno de los tres valores de la Tabla 12 la Tabla 11, para poder verificar las ventajas y desventajas de cada una de las alternativas. Los resultados se observan en la Tabla 13. Tabla 13.. .. Criterio. I. II. III. IV. V. Sumatoria. Sumatoria. Alternativas. Ponderada. A. 5. 1. 1. 1. 3. 11. 2.3. B. 5. 3. 5. 1. 5. 19. 4.1. C. 5. 5. 1. 1. 3. 15. 2.9. (Fuente: Andrade & Pereira, 2018). 33.
(51) -II UART (Figura 14), e. hip, esta tarjeta permite la. mediante un cable cuyos conectores son socket DB9 a OBD II, la misma que un conjunto de comandos Hayes (comandos AT) mediante un microcontrolador.. Compatibilidad con los comandos AT Mbps) Compatibilidad con diversos protocolos ISO 15765-4 (CAN) ISO 14230-4 (KP2000) ISO 9141SAE J1850 VPW (GM) SAE J1850 PWM (Ford) ISO 15765 ISO 11898 SAE 1939 Amplia memoria. Figura 14. SparkFun OBD-II UART. (Fuente: Toni_K, 2018). 34.
(52) La tarjeta SparkFun OBDII datos que deseemos obtener, mediante el uso de los comandos AT. Los comandos AT deben su nombre a que los mismos generalmente comienzan con la letra A o la letra T, son comandos que se utilizan como lenguaje de. Estas solicitudes deben ser enviadas desde un microcontrolador, posteriormente. El Anexo 2 muestra la lista completa de comandos AT. 2.2.2. e encarga de ser interpretados por el prototipo. Y a su vez, los resultados deben ser visibles en la pantalla de un computador. Es por lo que se requiere de un dispositivo co que sea capaz de interpretar estos datos, y a su vez enviarlos al computador. UART, es necesario el uso de un microcontrolador, que trabaje con protocolos de desde SparkFun OBDII. UART al computador.. Para resolver este particular se presentan las siguientes alternativas que existen en el mercado, Tabla 14. Tabla 14. Alternativas microcontrolador.. Alternativas A. Microcontrolador Microchip. B. Microcontrolador Atmega. C. Tarjeta Microcontroladora Arduino Due. (Fuente: Andrade & Pereira, 2018). 35.
(53) Tabla 15. Los criterios son ponderad. Facilidad de montaje. un montaje dificultoso puede generar problemas en el ensamblaje del prototipo. Bajo costo. Compatibilidad con c El. y el computador. deben conectarse y es Velocidad de procesamiento. la velocidad de respuesta del prototipo a las solicitudes que el usuario realice a del interfaz humano - maquina.. Tabla 15.. .. Criterio I. Facilidad de ensamblaje y montaje. 15%. II. Bajo Costo. 15%. III IV. 20% Disponibilidad 36. 10%.
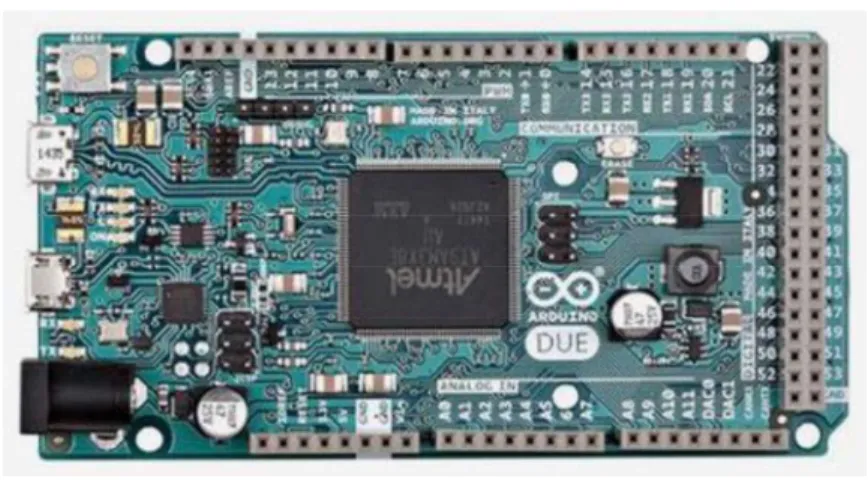
(54) V. Velocidad de procesamiento. 20%. VI. 20% Total. 100%. (Fuente: Andrade & Pereira, 2018). cuantificar el cumplimiento de cada alternativa, ver Tabla 16. Tabla 16.. .. Cualitativa. Cuantitativa. No cumple. 1. Cumple parcialmente. 3. Si cumple. 5. (Fuente: Andrade & Pereira, 2018). Se asigna uno de los tres valores de la Tabla 16 la Tabla 15, para poder verificar las ventajas y desventajas de cada una de las alternativas. Los resultados se observan en la Tabla 17. . Tabla 17.. .. Criterio. I. II. III. IV. V. VI. Sumatoria Sumatoria. Alternativas. ponderada A. 1. 5. 5. 5. 3. 3. 22. 3.6. B. 1. 5. 5. 5. 3. 1. 20. 3.2. C. 5. 3. 5. 5. 5. 5. 28. 4.7. (Fuente: Andrade & Pereira, 2018). , Figura 15.. 37.
(55) Figura 15. Arduino Due. (Fuente: Arduino, 2018). La simplicidad de montaje y facilidad con la que se puede programar y hermanar OBDII. SparkFun OBDII. UART, convierten al Arduino Due en. UART y a su vez enviar esta infor. en la que se procesa y muestra los resultados. Es decir, Arduino Due es totalmente compatible con el prototipo. Las principales Tabla 18. Tabla 18. Arduino Due.. Microcontrolador. AT91SAM3X8E 3.3 V 7. Entradas y Salidas Digitales. 12 V. 54 pines. Entradas. 12 pines 2. Corriente total de salida en todas las. 130 mA. entradas y salidas Memoria Flash. 512 kB. Memoria RAM. 96 kB (64 kB y 32 kB). Velocidad del oscilador. 84 MHz. 38.
(56) Dimensiones. 101.52 mm x 53.3 mm. Peso. 36 g. (Fuente: Arduino, 2018). Due por lo que ha sido seleccionada, entre ellas se tiene: Se puede alimentar directamente desde el puerto USB de un computador programa principal. que se comunique al mismo tiempo con SparkFun OBDII-UART y el computador. El entorno que no es un inconveniente hacer que la placa se adapte a las necesidades del prototipo. El Anexo 3 seleccionadas para implementar el prototipo. 2.2.3.. de prueba. 2.2.3.1.. Ford Ecosport 2007.. En la Tabla 19. Tabla 19. Ficha t. .. Motor. Delantero transversal. Cilindrada. 1.999 cm3. 39.
(57) 87.5 x 83.1 mm. secuencial 143 CV a 6 000 rpm 19.2 kgm a 4 250 rpm Caja manual de cinco marchas Delantera Independiente tipo McPherson con brazos triangulares delantera. montados sobre chasis auxiliar, resortes helicoidales,. arrastrados, Frenos. resortes. amortiguadores. Delanteros a disco ventilado (258 mm). Traseros a tambor (203 mm). ABS. 205/65x15. Largo/ancho/alto Distancia. helicoidales,. 4.220/1.734/1.679. entre 2.490/1.484/1.446. ejes/trochas 296 cm3 Tanque. de 45 litros. combustible (Fuente: Ford, 2008). prototipo, la Tabla 20 Tabla 20.. .. Sistema Operativo. 40.
(58) Procesador. Arduino: Microprocesador AT91SAM3X8E. Memoria. Arduino: 96 kB RAM. Conectividad. DB16 DLC Micro USB 2.0 Arduino: 7 Arduino: 3.3 VDC. Temperatura. de Arduino: -. funcionamiento Protocolos. SAE J1850 PWM (Ford) Este es el protocolo de prueba, ya que es el protocolo que posee la ECU del seleccionado. ISO 15765-4 (CAN) ISO 14230-4 (KP2000) ISO 9141SAE J1850 VPW (GM) ISO 15765 ISO 11898 SAE 1939 evaluados en el. (Fuente: Andrade & Pereira, 2018). En base a los datos adquiridos por el prototipo, es necesario interpretar los mismos, y con eso poder conocer los distintos resultados en base a la prueba. lo de prueba.. ha sido seleccionada la tarjeta microcontroladora Arduino Due, se va a programar las principales funciones del prototipo en el entorno de software libre. 41.
(59) mediante que se desea realizar entre las tres disponibles. 2.4.1. Como se observa en el apartado 2.2.1 OBD II - UART, la cual debe recibir un Arduino. SparkFun OBD II. UART responde una cadena de caracteres que debe ser. El protocolo OBD contiene 10 acceder. , Tabla 21. Tabla 21. Modos de protocolo OBD.. Modo Modo 01. Permite la lectura del flujo de datos. Como, por ejemplo: motor (aire, refrigerante), o cualquier otro dato disponible Cada uno de los elementos PID. Es importante aclarar que no todas las ECU son compatibles con todos los PID.. Modo 02 Modo 03. datos congelados. Muestra los. Modo 04 Modo 05. Auto no usan protocolo CAN). 42.
(60) Modo 06. Realiza auto vigilancia constante.. Modo 07. Permite la lectura de DTC no confirmados almacenados en la ECU.. Modo 08. Permite la lectura del resultado del auto sistemas, este modo es usado. Modo 09. diagn stico en otros en Europa,. Permite la lectura de. Modo 10 pueden ser borrados mediante el modo 4, un ciclo de auto eliminaci (Fuente: Andrade & Pereira, 2018). de funcionamiento planteados en e hacer uso del modo 01, 03 y 04. Las respuestas enviadas por la ECU son cadenas de caracteres, como se observa en la Tabla 22. Tabla 22. Cadena de caracteres.. A. B. C. A A A A A A A A B B B B B B B B C C C C C C C C 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0 (Fuente: Dashboards, 2010). Los bytes de respuesta se representan con las letras A, B y C. En donde A es el significativo. Para el modo 01, en la Tabla 23 se observa los PID asociados a cada uno de los datos que el prototipo requiere para cumplir las distintas funciones que posee. Tabla 23. Modo 01.. PID (hex). Bytes de respuesta. Valor. 43. Valor. Unidad.
(61) 04. 1. 05. 1. Carga calculada del motor Temperatura del enfriamiento motor. 0. 100. %. A/2.55. -40. 215. 0. 255. kPa. A. 0. rpm. 0. 16 383.75 255. (256A + B) /4 A. -40. 215. 0. 100. %. A / 2.55. 0. 1.275. V. A / 200. A. 40. del. 0B. 1. 0C. 2. RPM del motor. 0D. 1. Velocidad. 0F. 1. Temperatura del aire del colector de. 11. 1. del. km/h. A - 40. acelerador 14. 2 A: Voltaje. (Fuente: Dashboards, 2010). Para el Modo 03, en la Tabla 24 se observa la respuesta de SparkFun OBDII UART. Tabla 24. Modo 03.. Bytes de respuesta. Nota. n6. 3 falla. mensaje. (Fuente: Dashboards, 2010). Para el Modo 04, en la Tabla 25 se observa la respuesta de SparkFun OBDII UART. Tabla 25. Modo 04.. Bytes de respuesta 0 falla (Malfunction Indicator Lamp, MIL) (Fuente: Dashboards, 2010). La ECU. 44.
(62) Para cumplir con este fin, se utiliz para transformar tipos de datos.. la ECU se observa en la Figura 16.. Figura 16. Ejemplo tipo de dato. (Fuente: Andrade & Pereira, 2018). seleccionadas, en la Tabla 26. ipales funciones. del prototipo. Tabla 26. Funciones del prototipo.. efectivos (Torque, Potencia y Consumo) Lectura y borrado DTC Lectura de flujo de (Fuente: Andrade & Pereira, 2018). implementada en Arduino y Matlab.. 45.
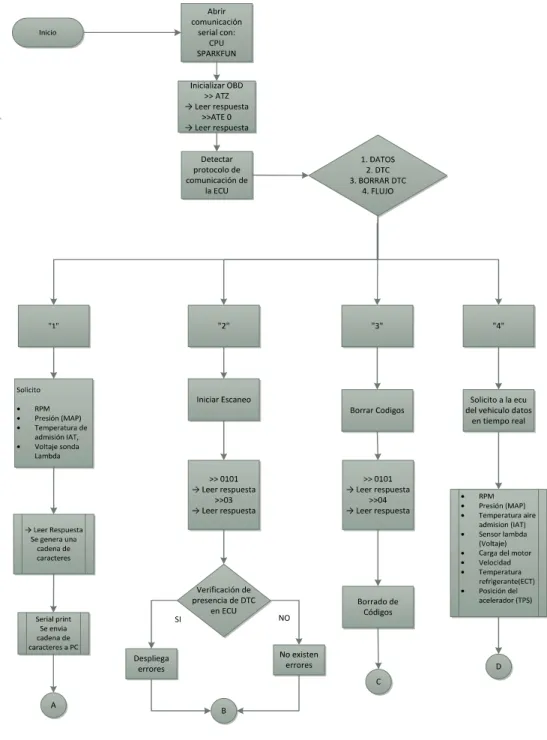
(63) 2.4.1.1.. respuesta se realiza en Matlab. En diagrama de flujo de la Figura 17 muestra la. Figura 17. Programa de Arduino. (Fuente: Andrade & Pereira, 2018). 46.
(64) , misma que hace referencia a la Figura 17, el Anexo 4 muestra completa de Arduino. Tabla 27. Muestra p. Arduino.. Serial.begin(9600); Serial1.begin(9600);. case '3':. OBD INIT:. Serial1.print("0101 r");. void ODB_init(void). OBD_read();. {. delay(500); //Wait for a little while before. Serial1.flush();. sending the reset command to the. delay(500);. OBD-II-UART. Serial.println("Borrado. de. delay(2000); //Reset the OBD-II-UART. for(int j=0; j<4; j++){. Serial1.print("ATZ r");. Serial1.print("04 r");. //Wait for a bit before starting to. delay(500);. send commands after the reset.. OBD_read();. delay(2000);. }. OBD_read();. e='0';. Serial1.print("ATE0 r");. break;. OBD_read(); Serial1.flush(); }. case '4': f=getRPM(); //RPM g=getPres(); //MAP [kPa]. case '1': a=getRPM();. i=getSOV1(); //sensor 02 [mV]. b=getPres();. j=getCarga(); //carga del motor [%]. c=getIAT();. 47.
(65) d=getSOV1();. k=getVel();. break;. //velocidad. del. vehiculo [km/h] n 2:. m=getTPS(); //TPS (%). case '2':. break;. Serial.println("INICIALIAZANDO SCANNEO"); delay(500); Serial1.print("0101 r"); OBD_read(); delay(500); Serial1.flush(); delay(500); Serial.println("LECTURA. DE. ERRORES"); for (int i=0; i<4; i++){ Serial1.print("03 r"); OBD_read(); delay(3000); } break; (Fuente: Andrade & Pereira, 2018). 2.4.1.2. Para realizar el monitoreo de datos y control de las funciones del prototipo se ha seleccionado el software Matlab.. del computador. Logrando de esta manera comunicarse con la tarjeta Arduino Due.. 48.
(66) Por tales razones, c necesaria para cumplir con las funciones necesarias.. El software de Matlab utiliza los datos recolectados por Arduino para. utilizan se encuentra en los puntos 1.4.3.1 y 1.4.3.2 correspondientes, devuelve los datos en una tabla de Excel, En el Anexo 5 n puntual de funcionamiento del. debe permitir que se realicen las siguientes tres funciones: detener por completo el prueba y permita graficarlos un mejor entendimiento. El diagrama de flujo del programa que se ejecuta en esta ventana se puede observar en la Figura 18.. 49.
(67) Figura 18.. .. (Fuente: Andrade & Pereira, 2018). 50.
(68) hace referencia a la Figura 18, el Anexo 6 de Matlab. Matlab:. 51.
(69) 2.4.1.2.1.. DTC. En este caso,. interprete la respuesta dada por. Arduino para que se pueda leer y desplegar los DTC presentes en la ECU del ECU se desplegar. ue existan n. Al falla, sino que a su vez sea posible realizar el borrado. .. El diagrama de flujo del programa se puede observar en la Figura 19.. Figura 19.. automotriz.. (Fuente: Andrade & Pereira, 2018). 52.
(70) Matlab:. hace referencia a la Figura 19, el Anexo 6. de Matlab.. Leer. 2.4.1.2.2. Para este caso, se requiere los datos en vivo de algunos sensores disponibles ayudan a tener una buena idea del funcionamiento. El diagrama de flujo del programa se puede observar en la Figura 20.. 53.
(71) Figura 20.. .. (Fuente: Andrade & Pereira, 2018). Figura 20, el Anexo 6 contiene. de Matlab.. R. 54.
(72) 2.4.2.. ajusten a las necesidades.. un interfaz, los indicadores que forman parte del se observan en la Tabla 28. Tabla 28.. .. Indicador Arquitectura pantallas. 55.
(73) Plantillas de los diferentes tipos de pantallas. funcionalidades. Comandos de entrada de datos. Modo de entrada de datos a la interfaz. (Fuente:. siguientes:. tiempo real).. reparac. ha sido exitoso convertir la cadena de caracteres asociada en su respectivo ico.. 56.
(74) 2.4.2.1.. pantallas: 2.4.2.1.1.. Pantalla Principal (Figura 21). Figura 21.. .. (Fuente: Andrade & Pereira, 2018). componentes de esta (Anexo 7).. 2.4.2.1.2.. Figura 22). visualizador que forma parte de Anexo 7).. 57.
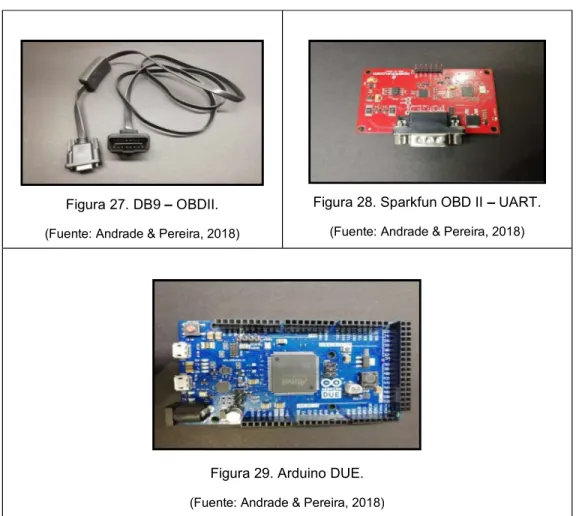
(75) Figura 22. Pantalla de c. efectivos.. (Fuente: Andrade & Pereira, 2018). 2.4.2.1.3.. Potencia (Figura 23). de. Figura 23.. .. (Fuente: Andrade & Pereira, 2018). 58.
(76) 2.4.2.1.4.. Pantalla. automotriz (Figura 24). Se presenta el funcionamiento de cada uno de los botones y visualizadores que forman parte de la interfaz de. er automotriz (Anexo 7).. Figura 24.. .. (Fuente: Andrade & Pereira, 2018). 2.4.2.1.5.. Pantalla de flujo de datos en tiempo real (Figura 25). Se presenta el funcionam datos en tiempo real (Anexo 7).. Figura 25.. . (Fuente: Andrade & Pereira, 2018). En la Figura 26 se muestra como el usuario puede desplazarse entre las distintas. 59.
(77) 60. (Fuente: Andrade & Pereira, 2018). Figura 26. Diagrama de desplazamiento entre interfaces..
(78) Para proceder al montaje del prototipo es necesario tener cada uno de los siguientes elementos a la mano: 1. SPARKFUN OBDII-UART, posee un interruptor que permite o detiene el intercambio de datos. (Figura 27). 2. La placa SPARKFUN OBDII contiene un microcontrolador que maneja diversos protocolos automotrices, por (Figura 28). 3.. de datos, misma que se. encarga del env estos y posterior transferencia de datos a la PC y el software s, (Figura 29).. Figura 27. DB9. Figura 28. Sparkfun OBD II. OBDII.. UART.. (Fuente: Andrade & Pereira, 2018). (Fuente: Andrade & Pereira, 2018). Figura 29. Arduino DUE. (Fuente: Andrade & Pereira, 2018). 61.
(79) n son. Arduino y la PC. 3. Se conecta el cable DB9. OBDII a la placa SparkFun OBD II. UART,. quedando el prototipo como se observa en la Figura 30.. Figura 30. Prototipo ensamblado. (Fuente: Andrade & Pereira, 2018). El prototipo ensamblado completamente pe ECU. SPARKFUN OBD II de realizar toda la. II. Arduino. PC de datos por la tarjeta SPARKFUN 0BD. UART, Arduino interpreta las cadenas de caracteres y las. a la PC y. el software Matlab es el encargado de utilizar los datos de Arduino para trabajar con ellos por el usuario. En la Figura 31. 62.
(80) Figura 31. Diagrama de montaje de prototipo. (Fuente: Andrade & Pereira, 2018). La Figura 32 muestra el encapsulamiento final del prototipo, en el contenedor y el ordenador.. Figura 32. Prototipo final. (Fuente: Andrade & Pereira, 2018). Sabiendo que el prototipo requiere de un computador que posea el software Matlab, en la Tabla 29 este equipo para que el procesamiento de los datos sea el adecuado. Tabla 29. Requisitos del sistema.. Requisitos del sistema Sistemas Operativos. Windows 10, Windows 8.1, Windows 8, Windows 7. 63.
(81) Procesadores. Cualquier procesador Intel x86 o AMD que soporte SSE2, o superior. Espacio en disco. 1 GB para instalar Matlab. Memoria Ram 4 GB recomendado para uso de Simulink (Fuente: Andrade & Pereira, 2018). La Figura 33 involucradas.. Figura 33.. .. (Fuente: Andrade & Pereira, 2018). 64.
(82) 3. R. protocolo de pruebas que permitan verificar el funcionamiento de cada uno de los procesos que realiza el prototipo. Dos de los modos de funcionamiento (. automotriz y flujo de datos en tiempo real) se pueden evidenciar su. funcionamiento prueba y a su vez encenderlo. resultados con los. E d la curva de torque y potencia que es el resultado del prototipo es cercana o no a la que entrega el equipo del Laboratorio de la EPN. 3.1.1. Prueba de funcionamiento prototipo. r Automotriz. Procedimiento: a) Desconectar dos sensores del. de prueba, en este caso el sensor. TPS y CMP. Figura 34 y Figura 35.. Figura 34.. TPS.. Figura 35.. (Fuente: Andrade & Pereira, 2018). (Fuente: Andrade & Pereira, 2018). 65. ..
(83) b). de error presentes. En la Figura 36 sensores que se desconectan en el paso a). Por lo que se observan los. Figura 36.. prototipo.. (Fuente: Andrade & Pereira, 2018). c) MS906. Figura 37.. Figura 37.. .. (Fuente: Andrade & Pereira, 2018). 66.
(84) d) Se conectan nuevamente los sensores que se retiraron, para simular una falla. Figura 38.. Figura 38.. .. (Fuente: Andrade & Pereira, 2018). e). Figura 39.. Figura 39.. prototipo.. (Fuente: Andrade & Pereira, 2018). 67.
(85) f) Verificar con el modo de han sido borrados. Figura 40.. Figura 40.. prototipo. (Fuente: Andrade & Pereira, 2018). g). MaxiSys. MS906. Figura 41.. Figura 41.. . (Fuente: Andrade & Pereira, 2018). 68.
(86) 3.1.2. Prueba de funcionamiento de prototipo real. Flujo de datos en tiempo. Procedimiento: a) Conectar el prototipo al de lectura de datos en tiempo real. Figura 42.. Figura 42. Lectura de flujo de datos. prototipo.. (Fuente: Andrade & Pereira, 2018). b) Desconectar el prototipo, y bajo las mismas condiciones, realizar la lectura MS906.. Figura 43. Lectura de flujo de datos (Fuente: Andrade & Pereira, 2018). 69. ..
(87) 3.1.3. Prueba de funcionamiento. efectivos. prueba es en la ciudad de Quito El tramo de prueba consiste en partir desde la entrada de la Escuela Superior redondel y retornar por la misma avenida al punto de partida, Figura 44. El prototipo contiene la progr. necesaria para dicho c lculo, en el Anexo 5.. Figura 44. Ruta planificada. (Fuente: Google Maps, 2018). En la Tabla 30 realizar la prueba en la ruta.. 70.
(88) Tabla 30. prototipo.. (Fuente: Andrade & Pereira, 2018). 71.
(89) En la Figura 45 prueba de ruta realizada.. Figura 45. Curva de Torque y Potencia. (Fuente: Andrade & Pereira, 2018). Al analizar la Tabla 30 [Nm] a 3900 rpm y la potencia m Se puede observar que las curvas obtenidas son continuas, que a su vez en debe a que la prueba presenta variaciones de carga debido prueba de ruta.. 72.
(90) 3.1.4. Prueba de funcionamiento laboratorio. efectivos en. Procedimiento: a). Figura 46.. Figura 46.. .. (Fuente: Andrade & Pereira, 2018). b) Se realiza una prueba simult prototipo, para validar los resultados. En la Figura 47 se observa el equipo de laboratorio y en la Figura 48 .. Figura 47.. .. Figura 48. Resultado prototipo.. (Fuente: Andrade & Pereira, 2018). (Fuente: Andrade & Pereira, 2018). 73.
(91) Resultados de la prueba: En la Figura 49 se observan las curvas obtenidas en la primera prueba discreta realizada.. Figura 49 (Fuente: Lincango, 2018). 74.
(92) A su vez, el equipo de laboratorio entrega el listado de datos de la prueba realizada, como se observa en la Tabla 31. Tabla 31. Datos prueba 1. (Fuente: Lincango, 2018). El prototipo entrega como resultado de la prueba realizada, una tabla de valores que puede ser trabajada en Excel para procesar estos datos de la forma que el usuario considere la mejora. De la prueba obtiene como resultado la Tabla 32. Tabla 32. Datos de prototipo - prueba 1.. (Fuente: Andrade & Pereira, 2018). La prueba se lleva a cabo dos veces, los resultados de la segunda prueba son los siguientes:. 75.
(93) En la Figura 50 se observan las curvas obtenidas en la segunda prueba discreta realizada.. Figura 50. (Fuente: Lincango, 2018). 76.
(94) En la Tabla 33 Tabla 33. (Fuente: Lincango, 2018). Mientras que en la Tabla 34 se muestran los resultados entregados por el prototipo. Tabla 34. Datos de prototipo - prueba 2.. (Fuente: Andrade & Pereira, 2018). 3.2. En el Anexo 8, se adjunta los certificados entregados por el CCICEV, en los. 77.
(95) 3.1.5. Prueba de funcionamiento Procedimiento: a.. iamente anclado. Figura 51.. Figura 51.. .. (Fuente: Andrade & Pereira, 2018). b. Desconectar la bomba de combustible, para nister de combustible, se conocer con exactitud el volumen de combustible consumido durante la prueba. Figura 52.. Figura 52.. .. (Fuente: Andrade & Pereira, 2018). c. y Potencia, se lleva a cabo la prueba de consumo. d. La cantidad de combustible restante ;p. alizar ha sido el rendimiento. e. Realizar la prueba 2 veces. 78.
(96) f. En la Tabla 35 se observa los resultados que ha dado la prueba de laboratorio consumido de combustible en cierta distancia. Tabla 35. Rendimiento - prueba de laboratorio.. (Fuente: Lincango, 2018). g. La Tabla 36 muestra los resultados obtenidos en el prototipo, el se realiza con la 29. Tabla 36. Consumo. prototipo.. (Fuente: Andrade & Pereira, 2018). El Anexo 8 incluye los certificados de la prueba realizada en el CCICEV.. prototipo, y verificar que las funciones se encuentran correctamente. 3.2.1.. -E 3.1.1, se ha realizado una prueba de. como resultado cada uno de los equipos. Tabla 37.. 79.
(97) Tabla 37. Respuesta de equipos. e. .. Equipo. Prototipo 906. Respuesta. P0122: Throttle/pedal position sensor/switch A circuit low. P0340:. Camshaft. position mariposa. de. sensor A circuit bank 1 or single sensor.. P0340: levas A (banco 1) problema en el circuito. (Fuente: Andrade & Pereira, 2018). 906 con lo que ha entregado el prototipo, es posible decir que el prototipo es confiable al realizar. 3.2.2.. - Flujo de datos en tiempo real. En el apartado 3.1.2 Autel MaxSys MS. 906 y con el prototipo. Los resultados que ambos equipos. entregan se pueden ver y contrastar en la Tabla 38. Tabla 38. Respuesta de equipos. flujo de datos.. Dato Entregado. Prototipo MaxSys MS. Carga de Motor [%]. Revoluciones del motor [rpm] Velocidad del. 906. 27.5. 27. 23. 23. 97. 97. 802. 799. 0. 0. 63. 52. 18.8. 18. (Fuente: Andrade & Pereira, 2018). Es importante aclarar que la lectura de flujo de datos se realiza en primer lugar. 80.
(98) En la Figura 53 se observa el diagrama de los resultados de la Tabla 38, para que se puedan apreciar de forma simple.. Figura 53.. flujo de datos.. (Fuente: Andrade & Pereira, 2018). Se observa que las lecturas de las condiciones son similares. Por lo que se concluye que los datos entregados por el prototi pueden hacer uso de estos. 3.2.3.. -C. para validar que los resultados de Torque y Potencia entregados por el prototipo pueden ser considerados fiables. Para esto, se compara la curva de potencia y torque de cada equipo. 3.1.4.. Torque. Tanto para la prueba 1 y 2.. 81.
(99) En la Figura 54 primera prueba discreta de torque y potencia.. Figura 54. prueba 1.. (Fuente: Andrade & Pereira, 2018). En la Figura 55. obtenidas. prueba discreta de torque y potencia.. Figura 55. - prueba 1.. (Fuente: Andrade & Pereira, 2018). 82.
(100) En la Figura 56 segunda prueba discreta de torque y potencia.. Figura 56. - prueba 2.. (Fuente: Andrade & Pereira, 2018). En la Figura 57 prueba discreta de torque y potencia.. Figura 57. - prueba 2.. (Fuente: Andrade & Pereira, 2018). los valores que se obtienen en las pruebas al utilizar el prototipo.. 83.
(101) Para realizar el respec prototipo. En la Tabla 39 se observan los valores promedios de las dos pruebas promedio de las pruebas del prototipo en la columna llamada Potencia. Tabla 39. Valores promedio de potencia.. (Fuente: Andrade & Pereira, 2018). En la Tabla 40 se observan los valores promedio de Torque, en la columna columna Torque los entregados por el prototipo. Tabla 40. Valores promedio de torque.. (Fuente: Andrade & Pereira, 2018). En base a que el objetivo es verificar si los datos entregados por el prototipo son realiza una l. Es importante aclarar que el conjunto de datos es multivariable,. 84.
(102) independiente son las revoluciones del motor, y en cada caso las variables Torque y la Potencia efectivos.. entrega el prototipo. 3.2.3.1.. Potencia. Haciendo uso de los datos de la Tabla 39 Figura 58 muestra en. Figura 58. potencia. (Fuente: Andrade & Pereira, 2018). A su vez, la Figura 59. 85.
(103) Figura 59 Grafica de residuos. potencia.. (Fuente: Andrade & Pereira, 2018). validar los resultados entregados por el prototipo. Para conseguirlo, se calcula el Tabla 41 se observan los valores de estos errores. Tabla 41. Error porcentual. potencia.. (Fuente: Andrade & Pereira, 2018). 86.
(104) Con. Tabla 42.. Tabla 42. potencia.. (Fuente: Andrade & Pereira, 2018). Al ser el error promedio de la prueba de Potencia de 9.52 41%, se puede afirmar que el prototipo entrega valores confiables. 3.2.3.2.. Torque. Procediendo de forma similar que en el punto 3.2.3.1, en la Figura 60 se muestra rojo la recta del prototipo.. 87.
(105) Figura 60. torque. (Fuente: Andrade & Pereira, 2018). una tendencia similar y son cercanas ent La Figura 61 misma se aprecia que tienen una tendencia similar y que ninguno de sus residuos es mayor que 3.. 88.
(106) Figura 61. torque.. (Fuente: Andrade & Pereira, 2018). En la Tabla 43, se observa el valor del error porcentual de torque para cada. Tabla 43. Error porcentual. torque.. (Fuente: Andrade & Pereira, 2018). 89.
(107) Tabla 44. Tabla 44. torque.. (Fuente: Andrade & Pereira, 2018). Al ser el error promedio de la prueba de Torque de 8.52. efectivo. 3.2.3.3.. Consumo - Rendimiento. En base a los resultados entregados en el punto 3.1.5, se observa que los valores obtenidos en la prueba de laboratorio (Tabla 35), se encuentra el rendimiento en [km/gal], mientras que utilizando la. 29 mediante el. software desarrollado, el prototipo entrega los valores de la cantidad de combustible utilizado en la prueba en [g] (Tabla 36). Por lo que es necesario, calcular el rendimiento en cada prueba conociendo la densidad del combustible (0.68 [g/cm3]) y la distancia recorrida (5.7 [km]). La Tabla 45 muestra el resultado del rendimiento. Tabla 45. Rendimiento. prototipo.. (Fuente: Andrade & Pereira, 2018). 90.
(108) Utilizando estos valores se calcula el error porcentual de cada tramo, tomando el valor entregado en el laboratorio como el valor real. Tabla 46. Tabla 46. Error porcentual. rendimiento. (Fuente: Andrade & Pereira, 2018). En la Figura 62 laboratorio con el prototipo.. Figura 62. (Fuente: Andrade & Pereira, 2018). Con los valores presentados observan en la Tabla 47.. 91.
(109) Tabla 47. rendimiento.. (Fuente: Andrade & Pereira, 2018). Aunque apenas se han considerado dos datos, se observa que promedio del error de la prueba de Consumo. Rendimiento es de 7.36. 2.54%, para confiar en este resultado entregado por el prototipo es contempla en este proyecto.. 92.
(110) 4. CONCLUSIONES Y RECOMENDACIONES. a. ISO 15765-4 (CAN), ISO 14230-4 (KP2000), ISO 9141-. 1850 VPW (GM), SAE. J1850 PWM (Ford), ISO 15765, ISO 11898 y SAE 1939. Por lo que, si un. b.. trabaja con un protocolo SAE J1850 PWM. Por lo que todas las funciones programadas en el prototipo han sido verificadas en funcionalidad, lectura de DTC, flujo de datos y. c.. mano de las modos de entrada de datos y para una persona que se desenvuelve en el campo automotriz.. d. haciendo uso de una matriz QFD, se definen las principales funciones del prototipo: c. p. torque, potencia y consumo),. l. DTC y lectura de flujo de datos del. vez validada para verificar el correcto funcionamiento del prototipo de e. L. c. de torque y potencia de la prueba que se. llevando a cabo, sin s resultados, se ha. 93.
(111) implementado, el guardar estos datos en una hoja de Excel. Lo que permite que el usuario tenga una herramienta adicional para interpretar y trabajar con los datos guardados. A su vez se puede acceder al modo de lectura de datos de poten f. omercial marca: Autel modelo MaxSys MS provocado un error, y s valida la correcta operabilidad y resultados que entrega el prototipo. g.. datos, en. prototipo. h. que es de utilidad para conocer. han sido en realidad las. prestaciones del motor en una determinada ruta. Las curvas entregadas tiempo futuras investigaciones. i.. , los errores porcentuales 9.52% Torque 8.52%. 1.75% y Consumo. Rendimiento 7.36%. 2.41%,. 2.54%; estos. errores denotan la fiabilidad de los resultados entregados por el prototipo, y validan el mismo; sin embargo, es necesario continuar con la .. 94.
(112) a. E considerar la forma adecuada en la que se debe trabajar la cadena de que partiendo de esto se puede interpretar los datos en base a la norma SAE J1979. b. El prototipo presentado hace uso del dato del sensor MAP para poder. indicados y efectivos teniendo como dato la lectura del sensor MAF, y de esta manera cubrir un mayor porcentaje del parque automotor de Quito. c. Implementar un soporte multilenguaje, permite que el prototipo pueda ser utilizado por usuarios del sector automotriz que no son hispanohablantes. d. El uso. del prototipo se puede ver reflejado en una correcta. e. una vez que el problema que ha ocasionado los mismos haya sido solucionado. .. 95.
(113) B (s.f.). Agency, E. P. (19 de 01 de 2017). EPA. Obtenido de Dynamometer Drive Shules: https://www.epa.gov/vehicle-and-fuel-emissions-testing/dynamometerdrive-schedules Andrade, & Pereira. (2018). parametros i Quito: EPN. Arab, S. (15 de 03 de 2018). http://www.conmasfuturo.es. Obtenido de http://www.conmasfuturo.es: http://www.conmasfuturo.es/tag/elementosde-arduino/ Arduino. (2018). Arduino. Obtenido de https://www.arduino.cc/ Autel,. I.. (2017).. AUTEL. -. Automotive. Intelligence.. Obtenido. de. Obtenido. de. http://www.auteliberica.es/products/maxisys-ms906.html Carman,. I.. C.. (2015).. CARMAN. INTERNATIONAL.. http://carman.global/product/auto-i-100/ Castillo, J., & Rojas, E. (2016). Quito: Escuela. Quito: Universidad San Francisco de Quito.. VEHICULAR. Dashboards, G. &. (11 de Junio de 2010). OBD-II Resource. Recuperado el 14 de Mayo de 2018, de http://obdcon.sourceforge.net/2010/06/obd-ii-pids/ Ford. (2008). Ford. Obtenido de www.ford.com 96.
(114) Jairo Castilo, e. (s.f.). Launch. (2017). X-431. Obtenido de http://www.x431.com/ Lincango, D. (2018). Pruebas . Quito: CCICEV.. Guatemala: San Carlos de Guatemala.. MULTIPROTOCOLO. GUATEMALA: UNIVERSIDAD DE SAN CARLOS DE GUATEMALA.. 9141-2.. Sevilla:. Universidad. de. Sevilla.. Obtenido. de. http://www.onboarddiagnostics.com/page03.htm Morales, C., & Valverde, U. (2010). Scanner Automotriz Interfaz PC. Mexico DF:. MOTORGIGA.. (05. de. 04. de. 2018).. motorgiga.. Obtenido. de. https://diccionario.motorgiga.com/diccionario/consumo-de-combustibledefinicion-significado/gmx-niv15-con193674.htm a , B., & Hurtado, M. (2015). 2003), Ford Explorer (2003 - 2006), Chevrolet Activo(2002-2013), con sistema OBDII, Fundamentado en el proyecto visualOBDJAR. Quito:. Pamplona: UPNA. Payri & Desantes. (2011).. Valencia:. Pulkrabek, W. (1997). Engineering Fundamentals of the Internal Combustion Engine. New Jersey: Prentice Hall.. 97.
(115) SparkFun, E. (2016). SparkFun Start Something. Obtenido de Products SparkFun OBD II UART: https://www.sparkfun.com/products/9555 Tarnok, F. (22 de Octubre de 2013). http://www.multiscanners.cl. Obtenido de http://www.multiscanners.cl/atecnicos/conector2.htm: http://www.multiscanners.cl The MathWorks, I. (15 de Abril de 2018). MathWorks. Obtenido de https://la.mathworks.com/discovery/matlab-gui-html Toni_K. (16 de 03 de 2018). https://learn.sparkfun.com. Obtenido de https://learn.sparkfun.com/tutorials/obd-ii-uart-hookup-guide Walli,. T.. (7. de. 02. de. 2018).. geotab.. Obtenido. de. https://www.geotab.com/blog/connecting-telematics-technology-tovehicle/ Wang, X., Ge, Y., Yu, L., & Xiangyu, F. (2013). Effects of altitude on the thermal efficiency of a heavy-duty diesel engine. Beijing: ELSEVIER.. 98.
(116) Anexos Anexo 1: Encuestas. 99.
(117) 100.
(118) 101.
(119) 102.
(120) Anexo 2: Comandos AT. 103.
(121) 104.
(122) 105.
(123) 106.
(124) Anexo 3:. SparkFun OBD II - UART. 107.
(125) 108.
(126) 109.
(127) 110.
(128) 111.
Figure


+7

Documento similar
En la base de datos de seguridad combinados de IMFINZI en monoterapia, se produjo insuficiencia suprarrenal inmunomediada en 14 (0,5%) pacientes, incluido Grado 3 en 3
Debido al riesgo de producir malformaciones congénitas graves, en la Unión Europea se han establecido una serie de requisitos para su prescripción y dispensación con un Plan
Como medida de precaución, puesto que talidomida se encuentra en el semen, todos los pacientes varones deben usar preservativos durante el tratamiento, durante la interrupción
•cero que suplo con arreglo á lo que dice el autor en el Prólogo de su obra impresa: «Ya estaba estendida esta Noticia, año de 1750; y pareció forzo- so detener su impresión
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
