Silla de ruedas eléctrica con sistema de navegación
38
0
0
Texto completo
(2) Contenido 1.. lntroducción ........................................ ........................ ................................... ................... 1. 1.1 .. Problemática ................................................................................................................. 1. 1.2.. Estado del arte .............................................................................................................. 1. 1.3.. Objetivos y metas ......................................................................................... ................. 2. 2.. Propuesta de solución ..................................... ....................................... ..... ..... ................. 3. 2.1.. Propuesta ..................................... ................................................................................. 3. 2.2.. Especificaciones mecánicas .................................................................... ....................... 3. 2.2.1.. Ruedas ..... ........................................................... ..................................... ................. 3. 2.2.2.. Distancia entre ejes ...................... ............................................................................. 4. 2.2.3.. Eje de ruedas traseras ............................................................................. ................... 4. 2.2.4.. Acoplamiento de los motores ................................. ................................................... 6. 2.2.5.. Base para la batería .................. ............................................................... .................. 8. 2.2.6.. Características del motor y datos de la silla .................. .. ........................................... 9. 2.2.7.. Comparativa con otros tipos de motores ... .......................................... ...................... 9. 2.2.8.. Resultados y Pruebas ............................................................................................... 1O. 2.3.. Etapa de potencia ........................................................................................................ 11. 2.3.1.. Interfaz de potencia para motores ........................................................................... 11. 2.4.. Control ............ .......................................................................................... .. ............... . 12 Control de velocidad analógico en lazo abierto .......... ................................... ........... 12. 2.4.1. 2.4.1.1.. Generación de la onda triangular ......................................................................... 13. 2.4.1.2.. PWM ................................................................................................................... 13. 2.4.1.3.. Circuito comparador ................................................................ ........ .... ...... ......... . 15. 2.4.2.. Aislamiento de la parte de alta potencia y baja potencia .......................................... 16. 2.4.3.. Resultados y pruebas ............................................................................................... 16. 2.5.. Sistema de navegación .................................................................................... ............ 21. 2.5.1.. Sensor ultrasónico ........................................................ ............................ ............... 21. 2.5.2.. Lógica difusa ................................................................ ............................................ 22. 2.5.2.1 .. Fuzificar ...... .......................................................................................... ............... 22. 2.5.2.2.. Evaluación de reglas .......... ........ .................................... ........... ...... ... .............. .... 22. 2.5.2.3.. Defuzificar ..... ....... ...... ........................ ................. ..... ............ ..... ............. ............ . 23. 2.5.3.. Sistema de navegación utilizando la lógica difusa .......... ........................................... 23. 2.5.3.1.. Programación en Basic stamp ..................................... .............................. ........... 26. 2.5.3.2.. Descripción gráfica del funcionamiento del sistema ............................................. 26.
(3) 2.5.4. 3. 3.1.. Resultados y pruebas ............................................................................................... 28. Resultados y pruebas finales ........................................................................................... 29 Protocolo de pruebas propuestas ................................................................................ 30. 4.. Conclusiones y trabajo futuro ........................................................ .................................. 30. 5.. Referencias ..................................................................................................................... 31. 6.. Apéndice......................................................................................................................................... 31.
(4) 1. Introducción 1.1.. Problemática. En México la mayoría de las sillas de ruedas usadas por la gente discapacitada no son eléctricas debido a que son muy costosas. En muchas ocasiones las personas no tienen la capacidad de mover las ruedas por lo que dependen de alguien más para poder ir de un lugar a otro. Con este proyecto esperamos desarrollar una silla de ruedas eléctrica que de movilidad a las personas con discapacidades, a un precio menor que las sillas de ruedas eléctricas del mercado.. 1.2.. Estado del arte 1. 1595: Primera silla de ruedas que fue diseñada para el propósito de ayudar a gente con discapacidad. Esta silla fue diseñada para el rey Felipe II de España.. 1. 1869: Primera patente de la silla de ruedas. Tenía un diseño bimanual impulsada por dos ruedas traseras.. 1. 1918: Primera silla de ruedas motorizada.. 1. 1933: Primera silla de ruedas plegable, parecida a la que se conoce hoy en día, construida por Herbert A. Everest y Harry C. Jennings.. 1. 1940: Primer diseño de silla de ruedas eléctrica patentada.. 1. 1957: Se vuelve uso común la silla de ruedas eléctrica.. I. l 960's: Médicos y diseñadores diseñan las primeras sillas de ruedas ajustadas para los niños con parálisis cerebral.. 1. 1964: Nacen los primeros juegos paraolímpicos en Tokio Japón.. I. l 970's: Sillas de ruedas ajustables hechas de aluminio.. I. l 980's y 1990's: Diseños revolucionarios en las sillas de ruedas. Se crean aditamentos de control, estilo, distancia de viaje, suspensión, manejabilidad y comodidad.. 1. 2003: Silla de ruedas iBOT desarrollada por Dean Kamen en colaboración ocn DEKa y Jhonson and Jhonson's. Es un asilla de ruedas que cuenta con 6 ruedas y es capaz de subir escaleras. Tiene un costo aproximado de $26100 usd.
(5) 1.3.. 1. 2005: En la Universidad Alex Mihailidis los colegas Jesee Hoey y Daniel Jun crean un sistema anticolisiones para sillas de ruedas eléctricas.. 1. 2007: En el Instituto Tecnológico de Estudios Superiores de Monterrey Campus Ciudad de México se diseña una silla de ruedas eléctrica con sistema de navegación.. Objetivos y metas. Una silla de ruedas tiene como objetivo perm1trr al usuario la max1ma funcionalidad, comodidad y movilidad. Para cumplir con este objetivo, ésta debe estar diseñada para ajustarse a la persona, no es la persona la que debe amoldarse a la silla. Es por esto que los objetivos de este proyecto tienen que tener las siguientes características: I. Silla de ruedas eléctrica de bajo costo con un sistema de navegación sencillo.. I. Fácil Mantenimiento de los mecanismos. I. Diseño ergonómico. 2.
(6) 2. Propuesta de solución. 2.1. Propuesta Se desea convertir una silla de ruedas convencional en una silla eléctrica que pueda evadir obstáculos. Se requiere de las siguientes etapas: •. •. • •. Mecánica: En esta parte se desarrollan los ejes para acoplar los motores a las ruedas de la silla así como el ajuste mecánico en general para adaptarlo a los motores y las partes electrónicas. Electrónica y eléctrica: En esta etapa se desarrollan los puentes H para el suministro de potencia a los motores así como algunas fuentes de voltaje para los circuitos de control sean alimentados. Control del sistema: Se desarrolla de forma analógica con amplificadores operacionales para la generación de un PWM. Sistema de navegación: Se colocan tres sensores en la silla para determinar la distancia entre esta y posibles objetos, a partir de las seflales recibidas por estos sensores se toman las decisiones de cómo se va a desplazar la silla.. 2.2. Especificaciones mecánicas 2.2.1.Ruedas Como dice su nombre, en la silla de ruedas, las ruedas son una parte muy importante del mecanismo. Una buena selección de estas permitirá el buen funcionamiento y será trascendental en el desplazamiento del usuario. Ruedas delanteras: Las ruedas delanteras son trascendentales para corregir y facilitar el movimiento de las ruedas traseras. Entre más pequeflas sean las ruedas se tendrá menos fricción con el piso y se tendrá mayor facilidad de giro. (Figura 1) Cubierta de las ruedas: Las cubiertas de las llantas permiten el amortiguamiento de la silla y la tracción de la silla con el piso. Dependiendo del material con el que este hecho, este mejorará el funcionamiento de la silla de ruedas. Las llantas que tienen esta silla son macizas que no amortiguan pero no requieren de mantenimiento por un largo periodo. (Figura 2). 3.
(7) Figura 1. Ruedas delanteras. Figura 2. Cubierta de llanta La propulsión óptima se realiza con las ruedas traseras paralelas al asiento. Si las ruedas están más anchas en la base, la silla es más estable. Si las ruedas están más juntas en la base, la silla es más inestable. [3]. 2.2.2. Distancia entre ejes Una distancia de 40 cm entre ejes trasero y delantero es lo suficientemente larga lo que permite mantener un rumbo más recto, pero también las ruedas recorren mayor distancia por lo que es necesaria más energía para su propulsión. Una distancia de ejes corta aproximadamente de 30 cm gira con mayor facilidad y se maneja más fácil al requerir menor gasto de energía para su propulsión[3].. 2.2.3. Eje de ruedas traseras Primero se quitaron los rodamientos que traían las llanas de la silla, ya que con estos se movían las llantas pero el eje permanecía fijo ( debido al principio de funcionamiento de los rodamientos), lo cual para nuestros 4.
(8) propósitos tendría que ser al revés, es decir, dejar fija la rueda y que ésta se moviera junto con el eje. Para lograr esto, como ya se dijo, se removieron los rodamientos de la rueda y se mecanizó una estructura tipo engrane la cual pudiera entrar a presión a la rueda para hacer que al girar ésta, girara el eje también. La forma de esta estructura se muestra en la siguiente imagen.. Figura 3. Estructura tipo engrane que se coloco en la rueda.. 5.
(9) 2.2.4.Acoplamiento de los motores En el proyecto anterior se hizo un acoplamiento por medio de chumaceras y un eje de metal como se ve en la Figura 4.. Figura 4. Acoplamiento de motores a la silla de ruedas del proyecto anterior. En este acoplamiento el eje se desviaba por lo cual la silla no se movía de manera recta. Debido a esto, se tuvo que modificar el sistema de los ejes totalmente. Lo cual se hizo de la siguiente forma. Primero se hizo la base sobre la cual se montan los motores para acoplarlos al eje de las ruedas, esta base se soldó a la estructura de la silla a la altura adecuada para dejar los centros de los ejes alineados; tanto de los motores como de las ruedas.. Figura 5. Base que soporta los motores. 6.
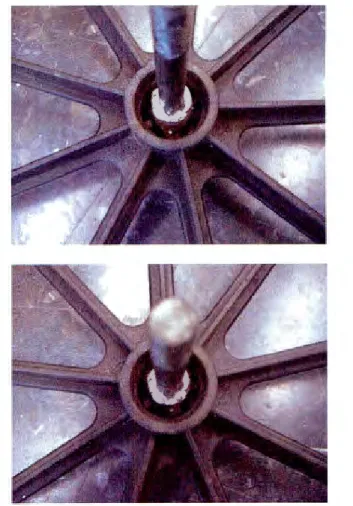
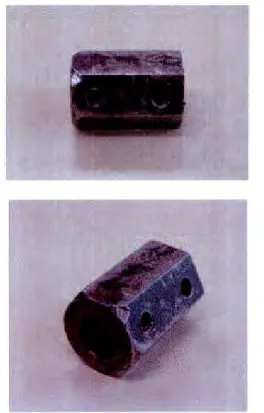
(10) Para acoplar los motores al eje de las ruedas se desarrollo una estructura la cual pudiera servir como acople entre el eje del motor y el eje de la llanta de la silla de ruedas, este acople se muestra en la siguiente imagen.. Figura 6. Acople entre eje y motor. Para acoplar los componentes (motor, acople y eje de la llanta) se les fabrico una cuerda a cada elemento para poder unirlos mediante pernos con cuerda los cuales permiten quitar los elementos de una manera más fácil.. Figura 7. Acoplamiento final entre el motor y la rueda. 7.
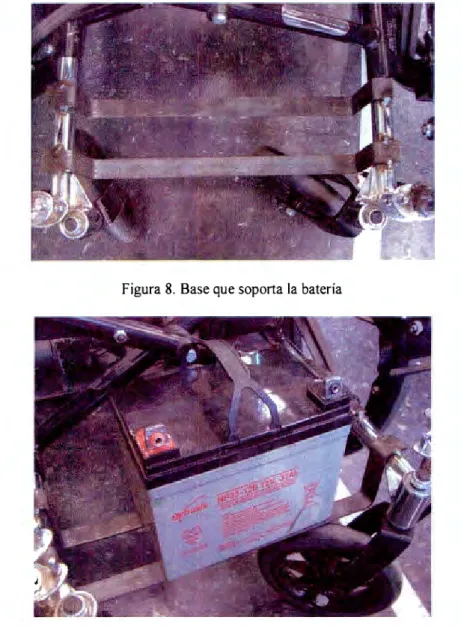
(11) 2.2.5. Base para la batería Se hizo con soleras la base para la batería, la cual irá sujetada con unos cinturones de seguridad para evitar que se caiga. Esta se muestra en la siguiente figura.. Figura 8. Base que soporta la batería. Figura 9. Batería sobre la base hecha. 8.
(12) 2.2.6. Características del motor y datos de la silla Las características del motor son las siguientes: • • • • •. Motores de CD Cuenta con un reductor de velocidad a base de engranes metálicos Voltaje de alimentación máximo de 12 volts La máxima velocidad del motor es 20rpm Cada motor pesa aproximadamente 3.5Kg. Las dimensiones de la silla de ruedas se muestran a continuación.. 90cm. . ///. 1/. · -/. ~. l. ~ - - · · -- · · ·· · ·. ...... . ..... · · · ~ cm. ............ -"'....... ..... Figura I O. Dimensiones de la silla de ruedas Algunos otros datos de interés se listan a continuación: • Peso de la silla incluyendo los motores, las baterías y los circuitos: 53Kg • Peso máximo soportado por la silla para su correcto funcionamiento: 25Kg • Velocidad máxima sin carga: 5Km/hr • Velocidad máxima con carga: 2Km/hr. 2.2.7.Comparativa con otros tipos de motores Para este proyecto se utilizaron motores de CD, pero podría ser posible utilizar de otro tipo; como los de corriente alterna. A continuación hacemos una comparativa entre los motores de CD y CA para describir la posibilidad de utilizar otro tipo de motores en la silla.. 9.
(13) Motor de CD Es menos eficiente que el motor de CA. Motor de CA Es más eficiente que el motor de CD. Para que este motor funcione con las baterías que la silla tiene se tendría que implementar un convertidor de CA a CD. Se utiliza por lo general en aplicaciones industriales de alto consumo de energía. Tabla 1. Comparativas entre motores de CD y CA. El motor de CD funciona conectándolo directamente a las baterías con las que cuenta la silla de ruedas. Se utiliza en aplicaciones pequeñas de bajo consumo de energía. 2.2.8. Resultados y Pruebas En las siguientes imágenes se muestran los resultados obtenidos. Figura 11 . Vista trasera de los resultados. 10.
(14) Figura 12. Vista frontal de los resultados Se realizó una prueba de la estabilidad de la silla, la cual consistió en montar todos los componentes a ella y una persona fue transportada en la misma para verificar que soportara el peso, además de que no se fuera hacia ningún lado por el peso tanto de la persona como de los demás componentes como batería y motores, es decir que no se desbalance.. 2.3. Etapa de potencia 2.3.1. Interfaz de potencia para motores Ya que la silla se mueve de forma recta (sin tambalearse de lado a lado como antes lo hacía), se procedió a medir la corriente que demandaba con carga y sin carga para poder diseñar el tipo de puente H a utilizar. Los resultados obtenidos fueron los siguientes: Carga Sin carga; estructura de la silla con pila (20 kg) Con carga; estructura de la silla, pila y persona (75 kg). Corriente 3 ampers máximo. 7 ampers máximo. Taba! 2. Carga aplicada a la silla Ys corriente demandada JI.
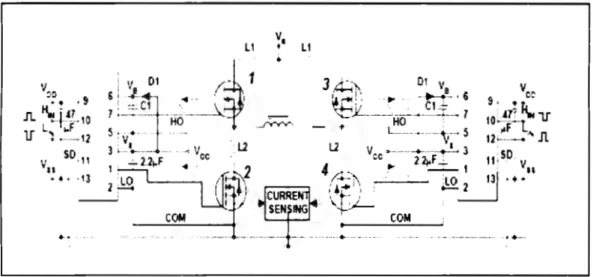
(15) Se decidió utilizar MOSFETS para hacer el puente H, ya que estos componentes trabajan con voltajes y no con corrientes lo que los hace más eficientes que los transistores. No se trabajo con un puente H integrado ya que el que encontramos en el mercado soportaba solamente hasta 6 Amperes lo cual como observamos en la tabla no es suficiente para el caso en el que se tenga carga de 75 kg o más.. V1. L1. 'I. i 'le. •1 . ..¡;*'. s , .._. lfl1.'"~-12. 5 ·v•3 , · '... . - - ~ V ce 1 : -"-2.2~F .• .. SD. VII •11 · • · -13. LI. 1. DI. 'f. . !I 1L ~f 4!_,o. 7. •. •. J ~°!\ ~ ~ ! ·.. ;_:.:--~!- -HÓ---~-. 01 \'. . ... . .. H. ~jl_·---~ HO:_~-~f~. JYvV·. L1 . ~. t. -. l2. 4 •--. ·r-·,' :. COM. ... . . ... -···· .... -·-· .. .. .. .. ... . ... ·-· ····. ·---- - ----·····- ··-. ---.. -···--···...... 1. L - -~----\¡--·S V • - - --+· - ··+. I_. l ce "'-f ... 2·~ 1. · o · r !:"1\2 r-+- i\ 2~ r ° ~ ~ . i 1'4URRE ( 1( 1 -SEN ING . "+:,L...... •. ... .. -. '. ·. · ~;. VC" . I0~-"-.1f. s. • t. 12!!._}·~11 : SO 11 : ·.. Vu 1J! ·•·. ~. COM ... ··-----~----·--. "'. . .·-··. Figura 13. Puente H utilizado para controlar el sentido del giro del motor Para controlar los MOSFETS del circuito mostrado en la figura 13 se genera una señal cuadrada la cuál es inyectada a las terminales de High Side channel (H1N) y Low Side channel (LJN) siendo la señal inyectada al high side el complemento de la señal low side. La figura 13 muestra las señales de entrada para cada lado del circuito. Al conectar la señal de entrada como se muestra en la figura 13, el circuito activa los MOSFETS I y 4 haciendo girar el motor hacia un lado. Al cambiar las señales inyectadas en ambos lados de los circuitos ahora se activan los MOSFETS 3 y 2 girando el motor hacia el otro lado. Se hizo uso de los circuitos integrados IR22 I O para controlar la activación de los MOSFETS.. 2.4.. Control. 2.4.1. Control de velocidad analógico en lazo abierto Para implementar el control de velocidad se decidió hacerlo de forma analógica, por medio de la realización de un PWM, utilizando una señal triangular y la señal a comparar (un valor de voltaje).. 12.
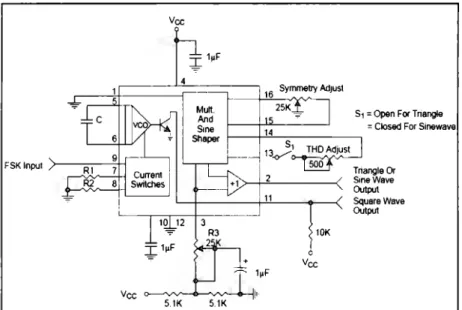
(16) 2.4.1.1. Generación de la onda triangular La onda triangular se generó utilizando el siguiente circuito. Para generar la onda triangular se utilizó un circuito integrado (XR2206) y se conectó como viene es su hoja de especificaciones, esto se muestra. en la figura 14.. +. FSK Input. 1µF. RI R2. Triangle Or. s,neweve Outpul. SquereWeve Output. 10 12 10K +1µF. ó +. ~. =. Vce,. 1µF. 1,-. Vce,. 5.1K. 5.1K. Figura 14. Generador de onda triangular. 2.4.1.2. PWM La modulación por ancho de pulsos (o PWM, de pulse-width modulation en inglés) es una técnica en la que se modifica el ciclo de trabajo de una señal periódica. La construcción típica de un circuito PWM se lleva a cabo mediante un comparador con dos entradas y una salida. Una de las entradas se conecta a un oscilador de onda triangular, mientras que la otra queda disponible para la señal moduladora. En la salida la frecuencia es generalmente igual a la de la señal triangular y el ciclo de trabajo está en función de la portadora. En las siguientes figuras se muestra el principio de funcionamiento del PWM. La señal triangular que es una de las entradas del comparador tiene la siguiente forma:. 13.
(17) V. :~. \. .~1 \ >. /\\. /\. r \V; \\. V. Figura 15. Onda triangular. La señal de referencia, varía y se compara con la señal triangular generándose así el PWM.. V. Figura 16. Onda triangular y señal a comparar. Las señales en rojo son las diferentes señales que vienen de un microcontrolador, para diferentes condiciones pero que siempre serán comparadas con la señal triangular en el amplificador operacional, como vemos si la señal roja que llamaremos a es mayor que la onda triangular que llamaremos b la salida del amplificador nos va a dar un valor de tensión "x" que consideraremos como un 1 lógico, y si el valor de a es menor o igual al de b nos va a dar una tensión cero, lo que quiere decir que solamente va a haber dos estados, encendido y apagado, esto nos va a proporcionar el ciclo de trabajo de los motores, es decir que va a estar encendiendo apagando el circuito pero a una frecuencia tan alta que solo se nota en el cambio de velocidad de los motores. Esto se puede ver de mejor forma en el siguiente diagrama. 14.
(18) V. ;#\ . : VA:V:Z2%A : ¡· :\ . 1. V ¡. :. t. ]I. ¡ 1. 1. 1. ª11!. JI. i. 1. 1. 1. :¡11 ::. iI. D. lt .. Ir.. n n [ ... Figura 17. PWM. Ciclo de trabajo para distintos voltajes. 2.4.1.3. Circuito comparador Un Amplificador Operacional puede ser utilizado para determinar cuál de las dos señales en sus entradas es mayor. (utilizado como comparador). Si una de las señales es mayor que la otra esto ocasiona que la salida del amplificador operacional sea máxima. Así, si la referencia es mayor que la señal triangular a la salida dará un voltaje en alto (+12 volts aproximadamente) y si la referencia está por debajo de la señal triangular la salida dará un voltaje de O volts. El circuito implementado con un amplificador operacional que realiza el PWM es el siguiente. 15.
(19) N\/\. + LM311. Vref~. I. -JUll. Figura 18. Comparador, (generador de PWM). 2.4.2.Aislamiento de la parte de alta potencia y baja potencia Para que lo elementos de baja potencia no sufrieran daños si ocurre algún error de sobre demanda de corriente se aislaron por medio de optoacopladores 6n137, la conexión utilizada se muestra en la figura 19. Pul•• Generator tr = 5ns. lo= SOl!. +5V. Vcc. 8 .1 11!. by pass lnpul. 1k. \. OutpUI (Vo). Mon~or. ~; el. (1,). GND 5. Figura 19. optoacoplador utilizado para aislar la parte de baja potencia y alta potencia. 2.4.3. Resultados y pruebas En las siguientes imágenes se muestran en su mayoría los circuitos realizados físicamente y los resultados obtenidos. El circuito generador de la onda triangular se muestra en la figura 20 y la onda generada por el mismo se puede ver en la figura 21.. 16.
(20) Figura 20. Circuito generador de onda triangular. Figura 21. Onda triangular generada por el circuito anterior (Sv por división). El circuito generador del PWM se puede observar en la imagen 22, y algunos de los resultados obtenidos de este se muestran en las figuras 23,24 y 25. Figura 22. Circuito generador de PWM. 17.
(21) Figura 23. Resultados del PWM (duty cycle de 30%). Figura 24. Resultados del PWM (duty cycle de 50%). Figura 25. Resultados del PWM (duty cycle de 85%). 18.
(22) Para aislar la parte de baja potencia y alta potencia se utilizaron optoacopladores los cuales se muestran a continuación fisicamente.. Figura 26. Aislamiento con optoacopladores El puente H, que controla a los motores por medio de un driver se puede ver en la figura 27 y la onda de activación de los mosfets en la figura 28. La integración de todos estos elementos se ve en la figura 29.. Figura 27. Puente H. 19.
(23) Figura 28. Ondas de activación de los mosfets. Figura 29. Circuito total que realiza el control de los motores (Integración) En el diagrama de la figura 30 se muestran las conexiones de manera más explícita del circuito desarrollado.. 20.
(24) , . , .... ~~- • .,N_'' [Q -·· ~ ~------'-v<;"""'.-.. - - - - - - - -. ,..... Figura 30. Diagrama de circuito. 2.5.. Sistema de navegación El principio de funcionamiento del sistema de navegación aquí desarrollado se basa en el siguiente comportamiento: 1. Se adquieren datos del ambiente por medio de sensores ultrasónicos. 2. Utilizando la teoría de la lógica difusa se evalúan los datos obtenidos de los sensores ultrasónicos y se toman decisiones las cuales son enviadas al control analógico. 3. Dependiendo de la señal recibida, los circuitos analógicos hacen el control en lazo abierto (PWM) para controlar el giro de los motores. 4. Después de esto se vuelven a adquirir datos volviendo así al paso l.. 2.5.1. Sensor ultrasónico El principio de funcionamiento del sensor ultrasónico de manera general es el explicado a continuación. Para mayor explicación se puede consultar el anexo correspondiente al sensor ultrasónico. a. Se envía un pulso a uno de los pines del sensor para activarlo. b. Por el mismo pin se recibe un pulso proveniente del sensor que nos indica el periodo que tardo en ir y regresar el pulso enviado anteriormente. Con esto podemos determinar la distancia a la cual se encuentra un objeto. Esto se puede ver de forma gráfica en la figura 31. 21.
(25) Sl.:>rl :iutsc. .n .. ---+. - .r----~ Echo Time P.Aso. ~. Vss. Figura 3 1. Principio de funcionamiento del sensor ultrasónico. 2.5.2. Lógica difusa La lógica difusa se basa en un conjunto de reglas llamados predicados, premisas o condiciones, que es solo una combinación de operadores ANO, OR, o NOT, para inferir un resultado. Existen varios métodos para inferir resultados; uno de los más comunes se llama el método de Mamdani. En 1975 Ebrahim Mamdani del Queen Mary College ofthe University of London publicó el articulo "An Experiment in Linguistic Síntesis with a Fuzzy Logic Controller" en donde se demuestra que la lógica difusa se puede utilízar en aplicaciones de control automático. En 1978 la empresa F.L.Smidt construyó un controlador de un horno de cemento, que se considera la primera aplicación industrial de la lógica difusa. El proceso de construir un controlador que utilice lógica difusa se puede dividir en la construcción de sus tres partes componentes. Este esquema representa el mecanismo de inferencia de Mamdani. Según Mamdani, el proceso de inferencia conlleva lo siguiente: fuzificar a partir de funciones de pertenencia, obtener el grado de activación de las reglas y a partir de estas obtener la conclusión, y luego pasar al mundo real este resultado es decir defuzificar.. 2.5.2.1. Fuzificar El primer paso que debe realízar el controlador es pasar la variable medida a una representación difusas, para que pueda ser utilizado por las siguientes etapas. Esto se hace utilizando funciones de membresia de conjuntos difusos predefinidos. Por cada variable de entrada al controlador, esta etapa determina su grado de pertenencia a algún conjunto difuso, a partir de la función de pertenencia del conjunto.. 2.5.2.2. Evaluación de reglas Esta etapa constituye el "cerebro" del controlador, puesto que aquí es donde se define la lógica que debe realizar para controlar adecuadamente a la planta. La entrada a esta etapa es el grado de pertenencia de las variables de entrada a algún conjunto difuso. A partir de estos datos se evalúan un 22.
(26) conjunto de reglas, como se describió anteriormente, para obtener un resultado. A partir del grado de activación de la condición if se obtiene el grado de activación de la conclusión. A partir de este resultado se obtiene una función de pertenencia para la salida, similar a las funciones de pertenencia de los conjuntos difusos. Esta función de pertenencia depende de las funciones de pertenencia de los conjuntos que definen la regla que aplica.. 2.5.2.3. Defuzificar Una vez que se tiene la función de pertenencia para la salida, lo que resta es pasar esto al mundo real, para que pueda controlar a algún dispositivo de la planta. Existen varios métodos a partir de los cuales se obtiene esta señal. Los más usados son los del "valor máximo" y el de "centro de gravedad":. ... Entrada. IF THEN ,.· -. ~. \. -. Fuzzificación. Evaluación de reglas. Defuzzi ficación. Figura 32. Diagrama de bloques de un sistema difuso Mamdani. 2.5.3.Sistema de navegación utilizando la lógica difusa Para la silla de ruedas se propusieron el siguiente conjunto de entradas, reglas y salidas Entradas: Se tiene 3 sensores y para cada sensor se considero ponerle las siguientes entradas.. 23.
(27) Memt,ership function plots. FIS Variables. ~ [ZZ] ~ S1. MI. ~. hlD. plot por,ts:. lej0$. os. $3. o --··-·-·----·---.i.-·---'----·-····--- O. O!. 1. 1 "·. - ______. 2. 25. input variable ·s1·. S1 Type. ~. ......... J103.3J 11033¡. __.¡. _ __. :l. Jcerca. .... Type. J. jtropmt. "-' Display Rango. 1161. ce re.a. j (-1.2-0.1411 .52.5) ~. __J. Close. __J. Figura 33. Entradas consideradas para el sistema difuso Las reglas establecidas dependiendo del valor de la entrada de cada sensor se muestran a continuación. •. • • • • • • •. J. lf(Sl is cerca) and (S2 is cerca) and (S3 is cerca) then (MD is no_girar)(MI is no _girar) ( 1) 2. If(Sl is cerca) and (S2 is cerca) and (S3 is lejos) then (MD is no_girar)(MI is no_girar) ( l) 3. If (SI is cerca) and (S2 is lejos) and (S3 is cerca) then (MD is girar_hacia_delante)(MI is no_girar) (l) 4. If (SI is cerca) and (S2 is lejos) and (S3 is lejos) then (MD is girar_ hacia_de !ante)(MI is no_girar) ( l ) 5. If (S l is lejos) and (S2 is cerca) and (S3 is cerca) then (MD is no_girar)(MI is gira_hacia_delante) (l) 6. If (SI is lejos) and (S2 is cerca) and (S3 is lejos) then (MD is no_girar)(MI is gira_hacia_delante) (!) 7. lf(Sl is lejos) and (S2 is lejos) and (S3 is cerca) then (MD is girar_hacia_delante)(MI is gira_hacia_delante) (1) 8. If (SI is lejos) and (S2 is lejos) and (S3 is lejos) then (MD is girar_hacia_delante)(Ml is gira_hacia_delante) (l). Las salidas que se proponen son las siguientes y vienen también descritas en las reg las (con las acciones).. 24.
(28) MentJersh,p funcuc-n plots. FIS Variables. pfot points: ~. nG~rar S1. g,rar.ac1a.,e1+.te. MI. '~. 1~. S2. MD. X:K 1,. ------!". TO. ... cuti,s1 varlotle "!Ar. C11reri Variable. OXro<t - s h i p Function (clici< on MF to select). Nome. Name. jgi's_hecia_atrás. Type. Jtn,pmt. "'. OI.C¡x.j. Type. Params. Ronge. li-12121. Display Ronge. lt-12 121. .::l. li-20.6 -13 -9 OJ Clase. Heip. Sefected varier.ble W. Figura 34. Salidas (acciones a tomar) Una simulación en Matlab® nos muestra que al variar los valores de los sensores (S 1=sensor 1, S2= sensor 2, S3= sensor 3) se obtienen diferentes salidas para cada motor como se ve en la figura 35. SI = 50 significa que el sensor 1 detecta un objeto a 50cm y así para los demás sensores. Sl = :-C. S2= 1€-7. ~ [¡:J. D 2 3. D. 53 = 167. --..,,,\. 4D. 1. ,e·. 1. E·. l. 1. \I ... 1. 1. 7 1. 8. 3~-4. l. 1. t. L. \. 1. L ~ L'. 1. \. \. //']. ¿¡. 1. 1. p01. ./ j. _/"J. ,,<J. ~<J. A) - 12. I Opened system FM, 8 rules. l ¡. 1. 1. IIPlot points:. ~. ,. / l. 1. P?,~ P?,.. ¡Input: ] [50 167 167]. r.11=-6.:.Se-018. 1. '. o. r.m = s.ce. .. 12. 1. 1. 12. - 12. 1IMove:. ~~~~. 11. Help. Close. Figura 35. Simulación en Matlab® para diferentes valores de los sensores. 25.
(29) 2.5.3.1. Programación en Basic stamp El basic stamp lo utilizamos para que nos de el valor de referencia del comparador para generar el PWM. Este valor se obtiene de las reglas del sistema difuso y dependerá de la distancia detectada por el sensor. El programa utilizado para leer los valores de distancia de los tres sensores y la evaluación de las reglas se muestra en el apéndice 1. En el siguiente diagrama de flujo se ilustra el funcionamiento del programa que se realizó en el BasicStamp.. Inicio. i. ... ······ · -·--··. ' Lectura de datos ,. .... de los tres sen60fes. :.. Si. No 51 cerca?. ..... 52 cerca?. •. :··;fo girar ;. otar derec~ :. G1ra1 motor ,zquierdo nacia adelante. No. S1. Girar motor derecho ha=,a adelante. Girar moro1 derecM. No. r.ac,a adelante 52 cerca? Girar motor ,z qUJerdc hac,a adelante. S1. No. 53 cerca·,. .,. Girar. .. ·. ambos motores hac,a atr~s. .. s, .t .... Parar motor 1.ZQu1erdo Parar motor derecho :·. Figura 36. Diagrama de flujo del funcionamiento del programa del BasicStamp. 2.5.3.2. Descripción gráfica del funcionamiento del sistema En las siguientes imágenes mostramos la ubicación de los sensores en la silla, además se ve de manera gráfica cómo tendría que comportarse el sistema.. 26.
(30) - ·---·---------------- ·---------- - - - - - - - - - - ---- --- . 1. !. S2. -~-ª. 1. 11. Trayectoria que la silla deberia seguir al. I. ~. ~. detectar obstáculo en el sensor 1. L __ ----··- - ·--.. -..-._ J. "O. ~ ::::,. ou,. ~ E. Figura 37. Comportamiento deseado del sistema ------- - -···- ·--·---·- --. --. -. -. -. i;J el_°') :E ·:..~·. ~. .6. f F. 1 1 1 1. Figura 38. Comportamiento deseado del sistema 2.. i·-. a~- o ~i. J 27. ;§ 1 co \. 1.
(31) 2.5.4. Resultados y pruebas El circuito con el basic stamp integrado se muestra en la figura 32.. Figura 39. Basic stamp integrado al circuito de control. En la siguiente se muestra los circuitos montados en la silla y conectados a las baterías.. Figura 40. Circuitos montados a la silla Inicialmente probamos la silla sin los sensores, utilizando una resistencia variable para cambiar el valor de referencia; que el BasicStamp está encargado de enviar. Así pudimos comprobar que al conectar todos los elementos el sistema funcionara de manera correcta, es decir que al cambiar la referencia cambiara el sentido de giro de la silla y la velocidad de la misma. 28.
(32) 3. Resultados y pruebas finales Las pruebas realizadas fueron del movimiento de la silla sin carga y con carga, estas pruebas se tienen en video los cuales vienen en el CD adjunto a este trabajo. Estas pruebas son básicamente para ver si la silla evadía los obstáculos, observamos que la respuesta es lenta, es decir si evade los obstáculos pero algunas veces la respuesta es muy lenta. A continuación se muestran algunas trayectorias que la silla siguió en un lugar con obstáculos. Primera trayectoria:. '-#<. -, ' •. O Obstáculos Trayectoria seguida por la silla. e Punto donde se detlNO la silla. [~ Figura 41. Trayectoria I Segunda trayectoria:. ---------- -- -·· -·- ·--. -. -. -~. ~ -. -·--·- --- - - -- · -··-- ·- --····. • Punto inicial. O Obstáculos. o. • •. :i -·. ·-·- -···-······- - -----·--·-·-·- ·- - -- - - --. Trayectoria seguida Punto final Silla de ruedas. -. .. •. Figura 42. Trayectoria 2. 29.
(33) í-. -- - - - - - - - -. Tercera trayectoria. 1. • Punto inicial. ~ ~::e~~~~: seguida. { {. l _.....D:...___.,.... . O"-/'::. LJ. •. Punto final. :t J. Silla de ruedas. '--------·--···.·-. . . . -.- . ._,_._________J Figura 43. Trayectoria 3. 3.1. Protocolo de pruebas propuestas A continuación se propone un protocolo de pruebas para que posteriormente se puedan anotar datos acerca de la silla y tomar las decisiones correspondientes para que su comportamiento sea el óptimo . . .... , .. ,. !',•,,.. \ ,·!1,'.1 .:·. \ ..,Ju¡,•. _...;:. 'b~·..:.·. :1:.: 1.-..;1 11· ·. C l, rns:n tc· n1a.\ 1n1a. \ ·.._.1 ,,-:1 ,L c!. f' ¡ ~;:; b ~i. 1n a\i1n: 1. ' ¡ J)lllilli.1. ¡;1) i)I Jl1J. illJl1lfl1 :1. !:,. :q,ii ,·:,_!.-.. il t' !l1 Jtid:id :;. J.ic:in 1:tcLt. :1¡1l!,:- :1ck ,. ,k m:mJ:id:i. ak J rl!ad:i. (. , ,r:·1,! nt,'. \ '-:1 ,,..:,,i.id. , dj ¡¡. ..·-· .;. Tabla 3. Protocolo de pruebas propuesta. 4. Conclusiones y trabajo futuro Al final de este proyecto se logró acoplar los motores a la silla de ruedas, así como el desarrollo e implementación de dos puentes H; uno para cada motor, los cuales nos permiten para controlar el sentido del giro del motor. Así mismo se hizo un control en lazo abierto utilizando PWM para controlar la velocidad de los motores.. 30. I. :.
(34) Se instalaron los sensores en la silla de ruedas y se hizo el programa encargado de detectar a qué distancia se encuentran los objetos, a partir de esto se programaron las reglas del sistema difuso propuesto también en el basic stamp. Como trabajo futuro los siguientes puntos se consideraron: • • •. Mejorar el sistema de navegación Mejorar la parte de diseño ergonómico de la silla Acomodar los circuitos a la silla. S. Referencias [ 1] http://www.electronicafac il. net/tutoriales/tutoria12 l 2. html [2]http://www2.e ie.ucr .ac.cr/- valfaro/docs/mono grafias/0302/ucr. ie4 3 1.trabajo .2003 .02 .grupo04.pdf [3] http://es.wikipedia.org/wiki/Modulaci%C3%83n_por_ancho_de_pulsos [4] http://www.unicrom.com/tut_comparadores.asp [5]http://www.fundinguniverse.com/company-histories/Segway-LLC-CompanyHistory.html [6] Trabajo realizado hace dos semestres por Carlos Balderas Bautista,René Álvarez López, Marco Aguirre Mejía, Francisco Domínguez [7] "The art of electronics", Paul Horowitz, Winfield Hill, segunda edición, Cambridge University press. [8] "Fuzzy sets and fuzzy logic: theory and applications", George J. Klir, Bo Yuan, Prentice Hall [9] "A first course in fuzzy logic", Hung T. Nguyen, Elbert A. Walker. Segunda edición, Chapman & Hall.. 6. Apéndice Programa desarrollado en Basic Stamp. ' ------------------------------------------------------ ----- -------------------- --------------------~-----------------------------------~---' File....... Ping_Demo.BS2 Purpose.... Demo Code for Parallax Ping Sonar Sensor Author. .... Jon Williams -- Parallax, lnc. ' E-mail... .. [email protected] ' Started .. .. ' Updated.... 1 1 JAN 2005 ' {$STAMP BS2) ' {$PBASIC 2.5). ·---------------------- - - - -------------------------------- --- - --~--------- -------------------------------------- -------------------------' -----[ Program Description ]--------------------------------------------'. 'This program demonstrates the use ofthe Parallax Ping Sonar sensor and 31.
(35) .. 'converting the raw measurement to English (inches) and Metric (cm) units .. ' Sonar Math: ' At sea leve! sound travels through air at 1130 feet per second. This 'equates to I inch in 73. 746 uS, or I cm in 29.034 uS) .. .. ' Since the Ping sensor measures the time required for the sound wave to ' travel from the sensor and back. The result -- after conversion to 'microseconds for the BASIC Stamp module in use -- is divided by two to 'remove the retum portion ofthe echo pulse. The final raw result is 'the duration from the front ofthe sensor to the target in microseconds.. ' -----[ Revision History ]-----------------------------------------------. ' -----[ 1/0 Defin iti on s ]-----------------------------------------------Ping Pingo Pingi. PIN PIN PIN. 15 14 13. 'pin 15=sl 'pin 14=s2 'pin 13=s3. • -----[ constan ts ]--------------------------------------------------#SELECT $ST AMP #CASE BS2, BS2E Trigger CON 5 CON $200 Scale #CASE BS2SX, BS2P Trigger CON 13 Scale CON $0CD #CASE BS2PE Trigger CON 5 Scale CON $1El #ENDSELECT RawToln RawToCm. CON $0379 CON $0801. ' trigger pulse= 10 uS 'raw x 2.00 = uS. 'raw x 0.80= uS. 'raw x 1.88 = uS. '1 / 73.746 ' 1 / 29.034. ' -----[ Variables ]-------------------------------------------------rawDist in ches cm rawDist2 inchcs2 cm2 rawDist3 inches3 cm3. VAR Word VAR Word VAR Word VAR Word VAR Word VAR Word VAR Word VAR Word VAR Word. 'raw measurement. ' raw measurement2. 'raw measurement3. ' ----[ EEPROM Data ]-----------------------------------------------. ' -----[ In itial ization ]---------------------------------------------. 32.
(36) Res et: DEBUG CLS, "Parallax Ping Sonar", CR, ".......................................", CR., CR, "Time (uS)..... ", CR, "lnches........ ", CR, "Centimeters.... ' setup report screen. ' -----[ Program Code ]-------------------------------------------------Main: DO GOSUB Gct_Sonar PAUSE I inches = rawDist ** RawToln cm= rawDist ** RawToCm inches2 = rawDist2 ** RawToln cm2 = rawDist2 ** RawToCm inches3 = rawDist3 ** RawToln cm3 = rawDist3 ** RawToCm DEBUG CRSRXY, 15, 3, DEC rawDist, CLREOL DEBUG CRSRXY, 15, 4, DEC inches, CLREOL DEBUG CRSRXY, 15, 5, DEC cm, CLREOL DEBUG CRSRXY, 15, 7, DEC rawDist2, CLREOL DEBUG CRSRXY, 15, 8, DEC inchcs2, CLREOL DEBUG CRSRXY, 15, 9, DEC cm2, CLREOL DEBUG CRSRXY, 15, 11, DEC rawDist3, CLREOL DEBUG CRSRXY, 15, 12, DEC inches3, CLREOL DEBUG CRSRXY, 15, 13, DEC cm3, CLREOL. PAUSE 10. 'convert to inches ' convert to ccntimeters 'convert to inches ' convert to ccntimeters 'convert to inches ' convert to centimeters ' update report screen. ' update report screen. ' update report screen. ' gel sensor value. '*********************** IF (cm >= 150)AND (cm2 >= l 50)AND (cm3 >= 150) THEN lejos, lejos) PWM O, 128,50 'puerto O es MI PWM 1, 128,50 'puerto I es M D DEBUG "(sl==lejos, s2=1ejos, s3=1ejos)" PAUSE I GOTO Main. 'cm= SI cm2==s2 cm3=s3 (lejos,. ELSE IF (cm >== 150)AND (cm2 >= 150)AND (cm3 < 125) THEN PWM O, 128,50. '(lejos, lejos,cerca). 33.
(37) PWM 1, 128,50 DEBUG "(s 1=lejos, s2=lejos,s3=ccrca)" PAUSE I GOTOMain ELSEJF (cm>= l 50)AND (crn2 < 125)AND (cm3 >= 150) THEN PWM O, 128,50 LOW I DEBUG "(sl=lejos,s2=cerca,s3=Jejos)" PAUSE 1 GOTOMain ELSEIF (cm >= 150)AND (cm2 < 125)AND (crn3 < 125) THEN PWM O, 128,50 LOWl DEBUG "(s 1=lejos,s2=cerca,s3=cerca)" PAUSE 1 GOTOMain ELSEIF (",n < 125)AND (cm2 >= 150)AND (cm3 >= 150) THEN PWM 1, 128,50 LOWO DEBUG "(si =cerca,s2=lejos,s3=lejos)" PAUSE 1 GOTO Main. '(lejos,cerca,lejos). '(lcjos,cerca,cerca). '( cerca,lejos,lejos). ELSEIF (cm < 125)AND (cm2 >= 150)AND (cm3 < 125) THEN PWM 1, 128,50 LOWO DEBUG "(s 1=cerca,s2=lejos,s3=cerca)" PAUSE 1 GOTO Main. '(cerca,lejos,cerca). ELSEIF (cm < 125)AND (cm2 < 125)AND (crn3 >= 150) THEN LOW 1 LOWO DEBUG "(s 1=cerca,s2=cerca,s3=1ejos)" PAUSE I GOTO Main. '( ccrca,cerca,lejos). ELSEIF (cm < 125)AND (cm2 < 125)AND (cm3 < 125) THEN LOW I LOWO DEBUG "(s 1=cerca,s2=cerca,s3=cerca)" PAUSE 1 GOTOMain. '(cerca,cerca,cerca). ELSEIF (cm < 150) AND (cm >=125) AND (cm2 < 150) AND (cm2 >=125)THEN '(medio cerca, medio cerca) PWM 0,64,50 PWM 1,64,50 DEBUG "(s 1=medio cerca, s2=medio cerca)" PAUSE I GOTOMain ELSEIF (cm < 150) AND (cm >=125) AND (cm2 >= 150) THEN '(medio cerca, lejos) PWM 0,64,50 PWM 1, 128,50 DEBUG "(s 1=medio cerca, s2=lejos)". 34.
(38) PAUSE I GOTO Main ELSEIF (cm< 150) AND (cm >=125) AND (cm2 < 125)THEN '(medio cerca, cerca) LOW I PWM 0,64,50 DEBUG "(s 1=medio cerca, s2=cerca)" PAUSE 1 GOTO Main ELSEIF (cm2 < 150) AND (cm2 >=125) AND (cm>= 150) THEN '(medio cerca, lejos) PWM 1,64,50 PWM O, 128,50 DEBUG "(s2=medio cerca, sl=lejos)" PAUSE I GOTO Main ELSEIF (cm2 < 150) AND (cm2 >=125) AND (cm< 125)THEN '(medio cerca, cerca) LOWO PWM 1,64,50 DEBUG "(s2=medio cerca, s 1=cerca)" PAUSE I GOTO Main. ENDIF ENDIF. '************************** LOOP END. ' -----[ Subroutines ]------------------------------------------------' This subroutine triggers the Ping sonar sensor and measures ' the echo pulse. The raw value fi"om the sensor is con verted to 'microseconds based on the Stamp module in use. This value is 'divided by two to remove the retum trip -- the result value is 'the distance fi"om the sensor to the target in microseconds. Get_Sonar: ' make trigger 0-1-0 Ping = O ' activate sensor PULSOUT Ping, Trigger 'measure echo pulse PULSIN Ping, 1, rawDist rawDist = rawDist */ Scale 'convert to uS rawDist = rawDist / 2 ' make trigger 0-1-0 Pingo= O ' actívate sensor PULSOUT Pingo, Trigger ' measure echo pulse PULSIN Pingo, 1, rawDist2 'convert to uS rawDist2 = rawDist2 */ Scale rawDist2 = rawDist2 / 2 ' make trigger 0-1-0 Pingi = O ' actívate sensor PULSOUT Pingi, Trigger ' measure echo pulse PULSIN Pingi, 1, rawDist3 ' convert to uS rawDist3 = rawDist3 */ Scale rawDist3 = rawDist3 / 2 ' remove retum trip RETURN. 35.
(39)
Figure

+7




Documento similar
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
You may wish to take a note of your Organisation ID, which, in addition to the organisation name, can be used to search for an organisation you will need to affiliate with when you
Where possible, the EU IG and more specifically the data fields and associated business rules present in Chapter 2 –Data elements for the electronic submission of information
The 'On-boarding of users to Substance, Product, Organisation and Referentials (SPOR) data services' document must be considered the reference guidance, as this document includes the
In medicinal products containing more than one manufactured item (e.g., contraceptive having different strengths and fixed dose combination as part of the same medicinal
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
