Campus Monterrey
Lic. Arturo Azuara Flores:
Director de Asesoría Legal del Sistema
Por medio de la presente hago constar que soy autor y titular de la obra titulada
_", en los sucesivo LA OBRA, en virtud de lo cual autorizo a el Instituto Tecnológico y de Estudios Superiores de Monterrey (EL INSTITUTO) para que efectúe la divulgación, publicación, comunicación pública, distribución y reproducción, así como la digitalización de la misma, con fines académicos o propios al objeto de EL INSTITUTO.
El Instituto se compromete a respetar en todo momento mi autoría y a otorgarme el crédito correspondiente en todas las actividades mencionadas anteriormente de la obra.
De la misma manera, desligo de toda responsabilidad a EL INSTITUTO por cualquier violación a los derechos de autor y propiedad intelectual que cometa el suscrito frente a terceros.
Nombre y Firma AUTOR (A)
Modelado y Control de Giroscopio-Edición Única
Title Modelado y Control de Giroscopio-Edición Única Authors Amézquita Brooks, Luis A.
Issue Date 2005-06-01
Abstract Este proyecto representa el primer paso en una rama de investigación iniciada en el CEM enfocada al uso de giroscopios controlados con fines de aplicación automotriz. Con este fin se inició el estudio del giroscopio mecánico de laboratorio ECP750. Como primer paso en la investigación se pretende proveer de modelos lineales para un rango de operación adecuado que sean Útiles para el diseño de controladores lineales. Además de dichos modelos, se reportan algunos comportamientos, no modelables linealmente, observados en el dispositivo. Así mismo, se presenta un esquema de control capaz de cumplir con los objetivos de control comunes para este tipo de
aplicaciones. Además del diseño de un controlador lineal multivariable, se presenta una implementación tipo "scheduling" con el fin de extender el rango de operación del sistema de control. En todos los casos se presentan respuestas en tiempo real que ilustran los resultados obtenidos. En términos generales se obtiene información Útil con respecto a las dificultades y posibilidades
existentes al controlar un giroscopio con objetivos y rangos de operación acordes a aplicaciones automotrices.
Discipline Ingeniería y Ciencias Aplicadas / Engineering & Applied Sciences
Item type Tesis
???pdf.cover.sheet .thesis.degree.nam e???
.dc.contributor.adv isor???
???pdf.cover.sheet .thesis.degree.prog ram???
Campus Estado de México
Rights Open Access
Downloaded 19-Jan-2017 13:46:43
CAMPUS ESTADO DE MÉXICO
MODELADO Y CONTROL DE GIROSCOPIO
TESIS QUE PARA OPTAR EL GRADO DE MAESTRO EN CIENCIAS DE LA INGENIERIA
PRESENTA
LUIS ANTONIO AMÉZQUITA BROOKS
Asesor: DR. JESÚS ULISES LICEAGA CASTRO Comité de tesis: DR. VIRGILIO VÁSQUEZ LÓPEZ
DR. ALEJANDRO ACEVES LÓPEZ
DR. EDUARDO LICEAGA CASTRO
Jurado: DR. ALEJANDRO ACEVES LÓPEZ, Presidente DR. VIRGILIO VÁSQUEZ LÓPEZ, Secretario DR. EDUARDO LICEAGA CASTRO Vocal DR. JESÚS ULISES LICEAGA CASTRO Vocal
RESUMEN
Este proyecto representa el primer paso en una rama de investigación iniciada en el CEM enfocada al uso de giroscopios controlados con fines de aplicación automotriz. Con este fin se inició el estudio del giroscopio mecánico de laboratorio ECP750.
Como primer paso en la investigación se pretende proveer de modelos lineales para un rango de operación adecuado que sean útiles para el diseño de controladores lineales. Además de dichos modelos, se reportan algunos comportamientos, no modelables linealmente, observados en el dispositivo.
Así mismo, se presenta un esquema de control capaz de cumplir con los objetivos de control comunes para este tipo de aplicaciones.
Además del diseño de un controlador lineal multivariable, se presenta una implementación tipo “scheduling” con el fin de extender el rango de operación del sistema de control.
En todos los casos se presentan respuestas en tiempo real que ilustran los resultados obtenidos.
ABSTRACT
The present project represents the first step in a research branch initiated in the CEM with the goal of using controlled gyroscopes for automotive applications. With this goal in mind, the study of the ECP750 gyroscope was initiated.
As a first step in the research path, linear models for an adequate operating range, which can be useful for the design of linear controllers, are provided. In addition to the linear models, some observed behaviours, which cannot be modelled using linear systems, are reported.
A control scheme, capable of achieving the common control requirements for this area of application is also presented.
In addition to the design of a lineal multivariable controller the implementation of a scheduling approach, used to increase the operating range, of the control system is shown.
In every case, real time responses are given in order to illustrate the results.
RESUMEN/ABSTRACT ... 2
1 INTRODUCCIÓN ... 6
1.1 ANTECEDENTES ... 6
1.2 CONTENIDO GENERAL DE LA TESIS... 8
1.3 INTRODUCCIÓN AL GIROSCOPIO ... 9
1.3.1 CARACTERÍSTICAS GENERALES ... 9
1.3.2 APLICACIONES DEL GIROSCOPIO ... 10
1.4 MECÁNICA DEL GIROSCOPIO Y MODELOS EXISTENTES. ... 11
1.5 CONTROL DE GIROSCOPIOS... 12
1.6 OBJETIVOS... 13
1.6.1 OBJETIVOS PRINCIPALES ... 13
1.6.2 OBJETIVOS SECUNDARIOS... 14
1.7 EQUIPO ... 14
1.8 ESQUEMA DE CONTROL PROPUESTO... 16
1.9 CONCLUSIONES... 16
2 MODELADO DEL GIROSCOPIO ... 17
2.1 PRESESIÓN... 17
2.2 MODELACIÓN ... 20
2.2.1 ESTIMACIÓN CON MÍNIMOS CUADRADOS CON FACTOR DE OLVIDO. .... 23
2.2.1.1 ESTABILIDAD BIBO Y RANGO DE OPERACIÓN... 24
2.2.1.2 ESTRUCTURA DEL PROCESO ... 25
2.2.1.3 EXCITACIÓN PERSISTENTE ... 26
2.2.2 OBSERVACIONES DE LA IDENTIFICACIÓN EN TIEMPO REAL ... 26
2.2.3 MODELOS OBTENIDOS ... 32
2.3 ANÁLISIS DEL MODELO. ... 39
2.3.1 ESTRUCTURA DEL MODELO ... 39
2.4 COMPARACIÓN ENTRE MODELOS ... 43
2.5 OBSERVACIONES DEL PROCESO ... 50
2.6 PLANTEAMIENTO FINAL DEL MODELO... 53
2.6.1 MODELO EN q2=20o q3=0o y w1=480rpm... 55
2.6.2 MODELO EN q2=-20o q3=0o y w1=480rpm ... 56
2.6.3 MODELO EN q2=0o q3=0o y w1=480rpm... 56
2.7 CONCLUSIONES... 57
3 CONTROL EN UN PUNTO DE OPERACIÓN... 58
3.1 ESPECIFICACIONES DEL SISTEMA DE CONTROL ... 58
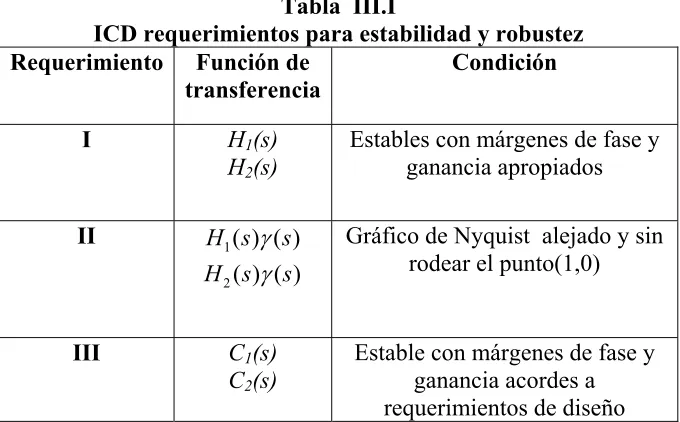
3.2 ICD ... 59
3.2.1 LA FUNCIÓN GAMMA ... 60
3.2.1.1 RELACIÓN DE GAMMA Y LA MATRIZ RGA... 60
3.2.1.2 GAMMA Y LOS CEROS DE FASE NO MÍNIMA... 61
3.2.1.3 ROBUSTEZ ESTRUCTURAL... 61
3.2.2 ACOPLAMIENTO ENTRE CANALES ... 62
3.3 DISEÑO DEL CONTROLADOR ... 63
3.3.1 CONTROLADORES SISO... 63
3.3.3 ANÁLISIS DE GAMMA... 66
3.3.4 EXISTENCIA DE CONTROLADOR Y CONDICIONES PARA ESTABILIDAD . 67 3.3.5 DISEÑO DE CONTROLADORES ICD ... 69
3.3.5.1 REQUERIMIENTO I ... 69
3.3.5.2 REQUERIMIENTO II... 70
3.3.5.3 REQUERIMIENTO III ... 71
3.3.5.4 ACOPLAMIENTO ENTRE CANALES ... 72
3.3.5.5 EL PAPEL DE LOS LAZOS CERRADOS SISO ... 73
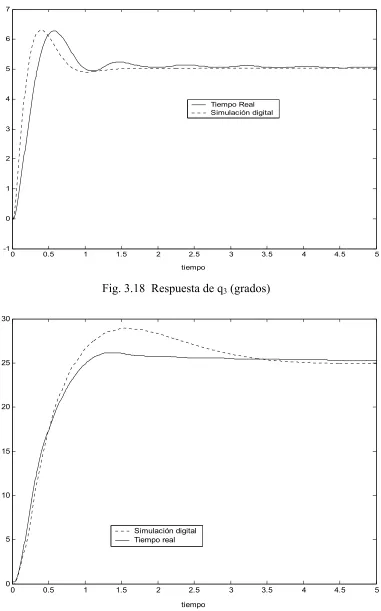
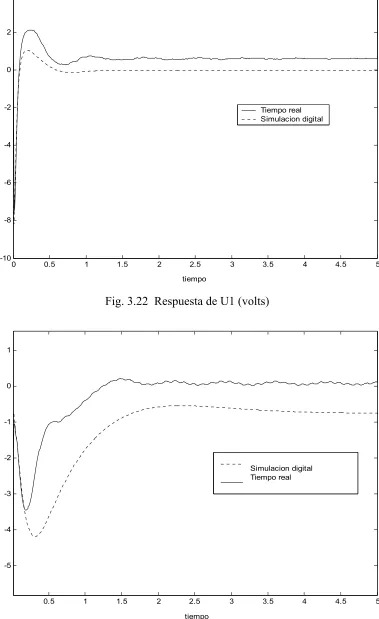
3.4 PRUEBAS DE SIMULACIÓN DIGITAL Y RESPUESTAS EN TIEMPO REAL ... 73
3.5 CONCLUSIONES... 78
4 ESQUEMA SCHEDULING Y CONTROLADOR FINAL... 79
4.1 ANÁLISIS DE GAMMA PARA LOS PUNTOS DE OPERACIÓN RESTANTES ... 79
4.1.1 ANÁLISIS DE GAMMA PARA EL PUNTO DE OPERACIÓN q2= -20o... 79
4.1.2 ANÁLISIS DE GAMMA EN PUNTO DE OPERACIÓN q2=0o... 80
4.2 CONCLUSIONES DEL ANÁLISIS DE GAMMA... 81
4.3 DESACOPLAMIENTO DE LOS CANALES... 82
4.3.1 ACONDICIONAMIENTO DE LA SEÑAL DE REFERENCIA... 82
4.3.2 SOLUCIÓN SCHEDULING ... 85
4.3.2.1 CRITERIO DE SCHEDULING... 85
4.3.2.2 ESTABILIDAD... 85
4.3.2.3 IMPLEMENTACIÓN EN TIEMPO REAL ... 86
4.4 CONCLUSIONES... 91
5 TRABAJO FUTURO ... 92
5.1 CONTINUANDO LA LÍNEA DE INVESTIGACIÓN... 92
5.2 MODIFICACIONES DEL ESQUEMA DE CONTROL... 93
5.3 CONCLUSIONES... 97
6 CONCLUSIONES ... 98
7 BIBLIOGRAFÍA ... 101
1 INTRODUCCIÓN
1.1 ANTECEDENTES
El presente proyecto es parte de la Cátedra de Control del departamento de Mecatrónica del Tecnológico de Monterrey Campus Estado de México, enfocada a fortalecer la línea de investigación en Sistemas de Control Multivariable; así mismo, se tienen relaciones de trabajo con respecto al proyecto con la universidad HTW de Saarbrucken, Alemania.
Este proyecto representa el primer paso en una rama de investigación iniciada en el campus enfocada al uso de giroscopios controlados para la estabilización de vehículos. Como primer paso en la investigación se pretende proveer de modelos lineales para un rango de operación adecuado que sean útiles para el diseño de controladores lineales. Así mismo, se presenta un esquema de control capaz de cumplir con los objetivos de control comunes para este tipo de aplicaciones. En términos generales se obtiene información útil con respecto a las dificultades y posibilidades existentes al controlar un giroscopio con objetivos y rangos de operación acordes a aplicaciones automotrices.
ambos casos, el tener un giroscopio controlado brinda ventajas contra su contraparte en lazo abierto, sin embargo, se encontraron pocas referencias del uso de giroscopios controlados para aplicaciones comerciales.
El problema de control –NO DE USO INSTRUMENTAL- del giroscopio mecánico ha sido, relativamente, poco abordado. Se tienen algunos resultados como [1] y [4], donde el diseño del sistema de control se limita a controlar solamente una configuración limitada del giroscopio. En [4], la estructura de 4 salidas 2 entradas del giroscopio se limita a un sistema 2x1 –una entrada dos salidas-, frenando los ejes restantes del dispositivo, con solo una salida completamente controlada. En [1], se presentan varias configuraciones siendo la más compleja una configuración de 2x2 donde los ángulos “yaw” y “azimuth” son las variables controladas. En el caso de [1] no se hace ningún esfuerzo por reducir el acoplamiento sobre-simplificando el sistema 2x2 a dos simples funciones SISO. Cabe mencionar que tanto en [1] como en [4] el propósito de controlar el giroscopio no es para una aplicación posterior sino para ilustrar diversos esquemas de control, limitando más aun las restricciones al no tener anchos de banda y rangos de operación que satisfacer. Debido a esto, existe la necesidad de plantear el problema del control del giroscopio en un sentido más completo, esto es, introduciendo condiciones de diseño y controlando las 4 variables de salida. Además, los rangos de operación de [1] y [4] son limitados debido a las limitantes de los modelos usados y a saturaciones en los esfuerzos de control con referencias de tamaño moderado. Para esta tesis se propone el control del giroscopio como un dispositivo 4x2 -en su configuración más completa- con dos salidas controladas y las otras dos salidas medidas y controladas como parte de un control en cascada sin consigna específica de señal de referencia a seguir. Gracias a la descomposición del modelo, se logró que las dos salidas parcialmente controladas tuviesen su propio controlador en lazo cerrado y fuesen, en realidad, el esfuerzo de control de las variables controladas de tal forma que rechacen perturbaciones. Además, al tener todas las variables en lazo cerrado, es posible –mediante la introducción de señales de referencia para las variables parcialmente controladas- controlar totalmente las cuatro variables de salida. A pesar de que el objetivo de la tesis se centra en el control de solo dos salidas, resultados preliminares del control de todas las variables se muestran al final de la tesis. Se logró, también, controlar el dispositivo en un rango de operación que va acorde con posibles aplicaciones en la estabilización de vehículos. Cabe mencionar que se hizo el diseño de los controladores de tal manera que se cuida la no-saturación de los actuadores. Por otro lado, durante el proceso de identificación no se garantiza la no-saturación al sólo ser necesario garantizar las características requeridas para los datos de entrada/salida del sistema dadas por el algoritmo de identificación, tal y como se estudian en el capítulo 2.
Cómo se había mencionado, el giroscopio es un problema MIMO de dos entradas y cuatro salidas altamente acoplado y no-lineal que presenta dinámicas de zona muerta en sus actuadores. Estas características presentan dificultades al momento de diseñar e implementar controladores de todo tipo.
1.2 CONTENIDO GENERAL DE LA TESIS
En este capítulo se presentan de manera breve las características generales de los giroscopios, así como sus aplicaciones más típicas. También se mencionan algunas aplicaciones innovadoras del giroscopio en sistemas de control y se comentan los resultados reportados en [4]. Posteriormente, se describen brevemente las características del giroscopio ECP750 con el cual se trabajó durante la elaboración de esta tesis. Finalmente, se presentan los objetivos generales de la tesis.
En el capítulo 2 se estudia el fenómeno de la presesión, la cual representa el fenómeno mecánico que da origen al Giroscopio, junto con una evaluación de los modelos presentados en [1]. A partir de esta evaluación y dado que dichos modelos no cumplen con las características deseadas, se decide realizar la identificación del proceso mediante el método de Mínimos Cuadrados con Factor de Olvido en tres puntos de operación definidos por el ángulo “roll” q2={20o, 0o, -20o}.
Las funciones de transferencia identificadas se sometieron a un proceso de reducción para simplificar su estructura sin perder las dinámicas más importantes. Además, se presenta una reestructuración del modelo de 4x2 a dos sistemas SISO en serie con un sistema MIMO 2x2. Esta reestructuración permite, posteriormente, utilizar el marco teórico de ICD el cual está basado en sistemas cuadrados nxn.
En el capítulo 3 se hace una breve introducción al marco de análisis y diseño ICD. Debido a que ICD es usado para el diseño de controladores para sistemas nxn y dado que el giroscopio tiene una estructura formada por dos sistemas SISO seguidos de un sistema 2x2, la definición tradicional de los controladores fue modificada para poder usar el marco teórico de ICD. Usando uno de los modelos identificados en el capítulo 2, se presenta el análisis de la planta mediante la Función de Estructura Multivariable. A partir de dicho análisis se presentan condiciones para la existencia y el diseño del controlador MIMO. Así mismo, se muestran respuestas en tiempo real de las variables de interés así como del acoplamiento. Este controlador representa la base sobre la cual se diseña, posteriormente, el controlador final para todo el rango de operación.
Posteriormente, en el capítulo 4, se analizan los modelos en los puntos de operación restantes mediante el marco teórico de ICD. A partir de este análisis, se evalúa el comportamiento de los canales individuales y, sobre todo, del acoplamiento. Utilizando esta información se determina que es posible utilizar un solo controlador diagonal para preservar las características deseadas de los canales para todo el rango de operación. Por otro lado, se determina que el acoplamiento tiene un comportamiento altamente no lineal que presenta problemas con controladores no diagonales. Utilizando ICD se desacoplan los canales, en gran medida, utilizando separación de anchos de banda; sin embargo, esto no resulta suficiente dadas las demandas especificas para cada variable de salida en cada uno de los canales. Adicionalmente, se presenta un diseño tipo “Scheduling” para controlar el giroscopio en un rango de operación mucho más amplio. Esto se pudo lograr gracias al análisis de la Función de Estructura Multivariable la cual es la piedra angular de ICD. Finalmente se muestran resultados en tiempo real del sistema de control diseñado.
1.3 INTRODUCCIÓN AL GIROSCOPIO
1.3.1 CARACTERÍSTICAS GENERALES
El giroscopio es un dispositivo mecánico como el que se presenta en la figura 1.1, con las variables de entrada y salida que se resumen en la tabla I.I y que presenta las siguientes dos características:
• Los ángulos q2 y q4 tienden a permanecer en la misma posición [22] cuando el disco
central esta girando y se rota el dispositivo en alguno de esos ángulos. Esto se debe al fenómeno llamado presesión.
• El giroscopio presenta el fenómeno de la presesión que en conjunto con la presencia de fricción en los ejes y cojinetes, y de errores de fabricación [17] (desbalanceos, etc), provoca que la primera propiedad tenga una “deriva”, es decir un pequeño error que se va acumulando [22].
TABLA I.I Variables del giroscopio ECP 750
Símbolo Variable
T1 Torca aplicado al eje 1 (via voltage al motor 1)
T2 Torca aplicado al eje 2 (via voltage al motor 2)
q1 Posición angular del eje 1 q2 Posición angular del eje 2 q3 Posición angular del eje 3 q4 Posición angular del eje 4 w1 Velocidad angular del eje 1 (disco)
Fig. 1.1 Esquema de un giroscopio común.
En la sección 2.1 se explica a detalle el fenómeno de la presesión. De manera cualitativa, la presesión consiste en el fenómeno, que presenta un disco rotando, de transferir el par aplicado en uno de sus ejes hacia otro eje.
[image:12.612.86.569.360.581.2]la ventaja de no depender, y por lo tanto no verse afectados, de los campos magnéticos. Esto es ideal en aplicaciones de aeronáutica y astronáutica.
Cabe resaltar que el amplio uso de los giroscopios ha dado como resultado la creación de muy diversas variantes de estos dispositivos, tales como:
Giroscopios vibracionales [12] Giroscopio de fibra óptica [13]
Giroscopio ESG (electrostatically suspended gyroscope) [14]
1.3.2 APLICACIONES DEL GIROSCOPIO
El uso y estudio del giroscopio generalmente se ve limitado a sus capacidades como un instrumento de medición y sólo ocupa el papel de sensor de posición angular en sistemas de control automatizado. Se debe notar que muchos de estos nuevos dispositivos que genéricamente son llamados giroscopios, ya no conservan los principios físicos de los giroscopios mecánicos. Lo anterior ocurre ya que se les nombra “giroscopio” a muchos dispositivos que, de manera similar al giroscopio clásico, ayudan a medir desplazamientos angulares. Todo esto permite también ver como el uso de los giroscopios se destina principalmente al sensado [17]. En el caso del uso de técnicas de control, se encuentran principalmente sistemas que pretenden lograr un mejor desempeño de los giroscopios como instrumentos de medición.
Además, el uso de los modelos matemáticos de este dispositivo se da, por lo general, al momento del diseño del dispositivo sensor, de tal manera que el dispositivo resultante no requiere el constante análisis de los modelos, sino de pequeños ajustes correctivos que se implementan de manera programada. Un ejemplo de esto se tiene en los compases giroscópicos, en los cuales el dispositivo sufre constantemente de reajustes manuales o programados por un computador para la corrección de la “deriva”, dichos reajustes se dan mediante la comparación de los datos proporcionados por otros instrumentos de medición más precisos (GPS, información de torre) y no por el análisis completo de los modelos matemáticos [16].
Al contar con un giroscopio controlado, la versatilidad de este dispositivo se vería aumentada sobretodo en las aplicaciones donde el giroscopio es un dispositivo activo.
1.4 MECÁNICA DEL GIROSCOPIO Y MODELOS EXISTENTES.
Un giroscopio es básicamente un disco rotando a velocidad constante como el que se muestra en la figura 1.2. Las ecuaciones que describen el comportamiento de un disco rotando sin fricción están dadas por [19]:
ΣMx = θ" - Iy(ψ')2cosθsinθ + Izψ'sinθ(ψ'cosθ + φ')
ΣMy = Iy(ψ'θ'cosθ + ψ"sinθ) - Izθ'(ψ'cosθ + φ') + Ixψ'θ'cosθ (1.1)
ΣMz = Iz(- ψ'θ'sinθ + ψ"cosθ + φ") - Ixψ'θ'sinθ + Iyψ'θ'sinθ
donde:
θ = Angulo con respecto a la gravedad
ψ = Presesión. φ = Angulo de rotación.
ΣMz,x,y= Suma de momentos.
Iz,x,y= Masas inerciales para cada eje.
y
[image:14.612.202.432.335.565.2]• =' :Derivada de •
Fig. 1.2. Disco rotando en el espacio.
La obtención de modelos lineales o no lineales para fines de control a partir de la solución de las ecuaciones (1.1) no es trivial.
Como se mostrará en la sección 2.2, los modelos lineales obtenidos a partir del modelo no lineal de [1], no representan el comportamiento del giroscopio correctamente. Así mismo, en la siguiente sección se muestran los resultados de un sistema de control diseñado usando modelos similares.
1.5 CONTROL DE GIROSCOPIOS
Resultados alentadores en el control de giroscopios se han obtenido mediante la aplicación de un controlador del tipo “Control de Modelo Interno Generalizado” (GIMC por sus siglas en ingles) basado en técnicas de optimización con modelado de variaciones paramétricas. En [4] se muestra el diseño de un controlador para un giroscopio similar al ECP750 usando modelos lineales similares a aquellos obtenidos por la linealización de los modelos no lineales de [1]. Sin embargo, estos resultados están limitados al caso de una entrada y dos salidas con sólo una salida controlada, además se pueden observar claras diferencias entre la simulación digital y la respuesta en tiempo real. Aquí cabe notar que el giroscopio puede ser visto como un problema de
2 entradas 4 salidas como se indica en la tabla I.I. En este caso se controla el ángulo q4 -de la
figura 1.1- y el ángulo q2 solo es observado para efectos del controlador pero no controlado. Los
otros ángulos, q1 y q3 se encuentran frenados mecánicamente.
En la figura 1.3 se pueden ver los resultados de la simulación digital de un controlador H∞ y un
controlador PD reportados en [4].
Fig. 1.3 Simulación digital (Ko controlador PD) segundos
En la figura 1.4 se tiene la respuesta de esos mismos controladores en una implementación en
tiempo real. El controlador PD logra controlar el ángulo q4 de manera apropiada, pero la
respuesta tiene significativas diferencias en cuanto a la frecuencia de oscilación y presenta un
error en estado estacionario [4]. Por otro lado, el controlador H∞ mantiene estabilidad pero falla
Fig. 1.4. Resultados en tiempo real (Ko controlador PD) segundos
En la figura 1.5. se muestran los resultados de la aplicación de un controlador GIMC. Estos resultados muestran respuestas aceptables que conservan estabilidad y desempeño aceptable pero con importantes diferencias entre la simulación digital y las respuestas en tiempo real.
1.5.a Simulación digital con GIMC 1.5.b Resultados en tiempo real con GIMC
segundos 2 segundos
En [4] se indica claramente cómo las diferencias vistas entre las simulaciones digitales y
respuestas en tiempo real con H y GIMC se deben a las grandes diferencias entre los modelos
existentes y el comportamiento del sistema.
∞
Esto deja notar la necesidad de contar con un modelo que contenga una mejor representación del comportamiento que presenta el giroscopio, lo cual plantea el primer objetivo de esta tesis.
1.6 OBJETIVOS
1.6.1 OBJETIVOS PRINCIPALES
Obtención de modelos lineales en 3 puntos de operación para el eje q2, del giroscopio
modelo 750 de ECP, mediante el método de mínimos cuadrados con factor de olvido. En su conjunto los 3 modelos deberán representar al proceso en un rango total de operación
de ±15o para el eje q
2, y en algún punto de operación para los demás ejes que conserven
Diseño e implementación en tiempo real de controladores lineales multivariables para el sistema de giroscopio modelo 750 de ECP. Control de dos de sus ejes con un ancho de banda de 1.7-8.5rad/seg . La elección del rango de operación y de anchos de banda, va enfocada a cumplir con el Nivel 1 de Maniobrabilidad para el control de vuelo de helicópteros [8]. Así mismo, el presente trabajo es una primera aproximación al control del giroscopio para futuras aplicaciones automotrices. Después de analizar los datos obtenidos en el proceso de identificación y modelado, se fija este objetivo al siguiente punto. En la sección 3.1 se discuten las razones para esta elección.
o Las salidas q3 y q4 controladas con un ancho de banda de 1.7-8.5rad/seg. q3 con
mayor ancho de banda y q4 con menor ancho de banda y mayor rango de
operación.
Implementación de un esquema de control tipo scheduling para mejorar el desempeño del
sistema de control dentro del rango de operación de seleccionado para controlar el
proceso.
15o ±
1.6.2 OBJETIVOS SECUNDARIOS
Estos objetivos representan algunos de los puntos que se desarrollaron y que podrían ser de utilidad en trabajos futuros, ya sea en esta línea de trabajo o en otras aplicaciones del giroscopio.
Diseño e implementación de programas y algoritmos en Matlab para aplicaciones de identificación de procesos. Diseño e implementación de los algoritmos de control.
Se observaron ciertas características no lineales de zona muerta que, en principio, permitirían el control (en regulación o tracking) de las cuatro variables de salida (dentro del rango de operación) con tan sólo dos entradas. A pesar de no ser este uno de los objetivos de esta tésis, esto se puede lograr gracias el uso del esquema de control propuesto en esta tesis y puede ser de gran utilidad para mantener a las variables internas dentro de su rango de operación o modificar “en línea” la configuración del giroscopio. Resultados preliminares en tiempo real se presentan en el capítulo 5.
1.7 EQUIPO
Para el análisis y diseño de sistemas de control de este tipo, se usará un giroscopio modelo 750 de la marca ECP. La figura 1.5 muestra un esquema de este sistema.
El sistema cuenta con las siguientes características:
Planta electromecánica: El giroscopio con actuadores (motores de CD) y codificadores
ópticos (mejor conocidos como “encoders”) de alta resolución. (Una cuenta = 1
66.66
grados para q2 y una cuenta =
1
Sistema de potencia: Comprende a la parte del acondicionamiento de señales de los actuadores y sensores.
Sistema de procesamiento y captura de señales: Esta parte esta conformada por una tarjeta de adquisición de datos la cual, además, tiene un DSP integrado, de tal forma que puede realizar control en tiempo real.
Sistema computacional: Se usó una computadora clase Pentium a 66Mhz para realizar las tareas más básicas del procesamiento de las señales.
Software de procesamiento en tiempo real: El software que se utilizó es el software propietario de la empresa ECP, este software permite la programación de controladores en tiempo real en un lenguaje computacional similar a la familia de lenguajes C.
Software de análisis de datos: Para el análisis de los datos experimentales se usó primordialmente el paquete de software MATLAB [20].
Control Effort (currents)
Real-time Control Algorithm (User Specified) Control Firmware User/System Interface Program ("Executive", C language)
+
DAC
• E n co d er # 1 • E n co d er # 2 • E n co d er # 3
• E n co d er # 1 • E n co d er # 2 • E n co d er # 3
• E n co d er # 1 • E n co d er # 2 • E n co d er # 3
T + T1 z 1 ++ T7 z
7 S o +S 1 -1 ++S 7 -7 - - -K 0 K 1 z++ K
7 z- 7 1 +L 1 z ++ L7 z 1 1+ R1z-1++ R7 -7
1 1 + J1z- 1
1 1 + G z H o+ H 1 z
-1 o + I1z-1
E o+ E 1z 1 F o+ F 1
z - 1
F ee d b ac k L oo p # 1
F ee d b ac k L oo p # 2 F ee d b ac k
L oo p # 3 N o de
A
N o de C N o de B
N o de D
-7
Mechanism
Drive Electronics
(Also referred to herein as "Control Box")
Power Supply Sensor #3 (Feedback Sensor) Sensor #2 Shielded Cable Shielded Cable Actuator #1 Sensor feedback Sensor #1 Ribbon Cable Aux. DAC Readouts Control Effort (a number) Control Effort (voltages) Digital-to-Analog Converters Numeric plant position signals Aux. DAC Readouts Ancilliary I/O
• Opto Isolation • Limit Switch I/O (if used)
• Trajectory Generation • Data Collection & Storage • Audit safety limits • Aux DAC updates • Watchdog timer support
Clock driven interrupt to syncronously service real-time control routine
Program Flow
Control algorithm parameters Execution commands Trajectory definition Safety shutdown commands
Real-t ime data display Upload acquired data Upload system status
Inputs From Controller
Off-line Functions
Plotting, file management, data import/export, unit conversions, etc.
Outputs to Controller
Encoder Pulse Decoders PC bus or
RS-232 Interface
Multi-task Routines
• Downloaded from Executive • Up to 1.1 kHz servo closure rates • 48 bit multiplication, 96 bit addition
(Fig. 4.5-2) (Fig. 4.5-1)
(Fig's 2.1-1 Through 2.1-12)
DSP (M56001) Based Controller / Data Acquisition Board
Control Effort (torque) Servo Amplifiers Current Control
(Fig's 4.3-2, -3) Actuator
#2
1.8 ESQUEMA DE CONTROL PROPUESTO
El esquema de control propuesto para la solución del problema de control del giroscopio, es el denominado Diseño por Canal Individual (ICD por sus siglas en inglés), el cual es un marco de análisis y de diseño, de sistemas multivariables lineales. Las técnicas de ICD permiten diseñar controladores a partir de sistemas SISO que se obtienen desde un sistema multivariable, de esta forma se pueden aplicar técnicas de análisis frecuencial clásicas como Nyquist y Bode además de los conceptos de robustez existentes en los sistemas SISO [10] [5] [6]. La elección de este marco de análisis y diseño se debe a que ICD provee herramientas para analizar la naturaleza del acoplamiento de sistemas MIMO y, además, incluye nociones de robustez sobre la estructura misma de los sistemas MIMO.
Finamente, debido a las características no lineales que presenta el sistema, se realiza la implementación de un sistema tipo scheduling para controlar el giroscopio en un rango de operación más amplio.
1.9 CONCLUSIONES
La función de los giroscopios dentro del control de procesos consiste principalmente en el sensado de posiciones angulares y, en algunos casos, en la estabilización de dispositivos usando giroscopios en un esquema de lazo abierto.
Existen pocas referencias acerca del uso de los giroscopios en lazo cerrado, sin embargo, la utilidad de un giroscopio controlado se podría explotar en varias áreas como la estabilización de diversos vehículos, robots y satélites.
Un trabajo previo en el control de un giroscopio similar al ECP750, usando modelos similares a aquellos reportados en [1], muestra que existe la necesidad de contar con modelos lineales que representen mejor el comportamiento del giroscopio. La obtención de estos modelos, para un rango de operación específico, es uno de los objetivos de esta tesis.
En esta tesis se atacará el problema del giroscopio en su configuración completa de dos entradas y cuatro salidas.
2 MODELADO DEL GIROSCOPIO
En este capítulo se estudia el dispositivo electromecánico giroscopio ECP750 a fin de obtener modelos lineales que sean útiles para el diseño de controladores lineales. Se analiza el fenómeno de la presesión de tal forma que el lector se familiarice y comprenda fácilmente este fenómeno, También se hace una evaluación cualitativa del comportamiento del giroscopio en los puntos de operación deseados.
2.1 PRESESIÓN
Existen muchas formas de plantear el problema físico de la presesión, sin embargo, la complejidad de muchas de ellas no permite una fácil comprensión del fenómeno. Debido a esto se decidió desarrollar un planteamiento simplificado para así obtener una explicación accesible del fenómeno. Esto se realizó no con la finalidad de generar modelos, sino con la finalidad de entender el problema claramente.
Se tiene un disco en el espacio, sin fricción ni gravedad, rotando a una velocidad constante sobre el eje , como se muestra en la figura 2.1. Suponiendo, además, distancias, masas inerciales y velocidades unitarias para facilitar el cálculo.
z
F1(t)=
δ
( )tSi se aplica un impulso de fuerza F1(t)=
δ
( )t en el extremo ry del disco con dirección se tendríauna torca en la componente
z
x solamente.
Recordando que:
T = Fr (para una sola componente) (2.1)
T = J
α
α
=a/rdonde:
radio del disco constante
masa inercial constante
( ) torca
( ) aceleración rotacional
( ) aceleración lineal r
J T t
t a t
α
= =
= = =
Asumiendo distancias y masas inerciales unitarias –cada una con sus respectivas unidades- , la fuerza está dada por:
( ) ( ) ( )
F t =T t =
α
t (2.2)Por otro lado, la velocidad rotacional del disco en x es igual a la integral de la aceleración
rotacional. En la ecuación (2.2) se determinó que, debido a que muchos de los valores se consideran unitarios, la aceleración angular será igual a la fuerza que puede depender del tiempo -F(t)- entonces:
( ) x
w =
∫
F t dt (2.3)Si se aplica un impulso de fuerza F t( )=
δ
( )t -figura 2.1- únicamente en dirección en elextremo del cuerpo , se tendría una velocidad constante igual a 1 alrededor del eje x.
z ry
1
x
w = (2.4)
Este comportamiento es normal si se tiene un cuerpo simétrico con el eje en x, y si (t) es igual
a un impulso en dirección
1 F
x en el extremo del cuerpo, este empieza a rotar a velocidad
constante sin detenerse, en caso de no existir fricción.
ry
Al mismo tiempo, como se indicó, se tiene una velocidad de rotación constante sobre el eje z, nótese que esta velocidad rotacional es completamente ortogonal a la inducida por el impulso de
fuerza F1(t). Debido a esto wx =1 solo por el instante en el que se aplica el impulso de fuerza.
z
w =C (2.5)
Debido a la ley de la conservación del momento rotacional, T = J
α
, en un primer instante el discoPara poder determinar en todo momento el comportamiento del disco –no solo en el instante en que se aplica el impulso de fuerza- se analizan varios componentes del momento generado a
partir del impulso de fuerza . Para lograrlo es necesario calcular la magnitud del momento
angular provocado por el impulso de fuerza F
1( ) F t
1(t). Debido a la ley de la conservación del
momento, esta magnitud no cambiará en ningún momento si no existen fuerzas externas.
Se puede notar que la magnitud del momento en el instante que se da el impulso F1(t) es igual a
uno, esto se debe a que m=Jwx y se sabía que wx=1, J =1.
Se pueden analizar dos componentes críticas de este momento, la componente sobre el eje x y la
componente sobre el eje y. En este caso se omite la magnitud del momento ya que se determinó
que era igual a uno.
cos( ) sin( ) x y m m
φ
φ
== (2.6)
donde:
momento en
momento en
deplazamiento angular sobre el eje x y m x m y z
φ
= = =La introducción del desplazamiento angular
φ
-ver figura 2.1- ayuda a elucidar el efecto quetiene el hecho de que el disco esté rotando también sobre el eje z -esto es justamente lo que
produce la presesión.-. Es claro que, debido a la velocidad constante de wz, el ángulo
φ
vacambiando en el tiempo, este cambio esta definido por la velocidad del disco. Entonces el valor
de
φ
es una función del tiempo y los componentes del momento también.Se deduce que en t=0 se tiene
φ
=0, a medida que pasa el tiempoφ
se va incrementando demanera lineal. Si se asume que
φ
( )t =t se tiene:( ) cos( )
( ) sin( )
x y
m t t
m t t
=
= (2.7)
Por otro lado, el desplazamiento angular, analizado únicamente en uno de sus componentes, es
igual a la integral de la velocidad angular, además, el momento angular es igual a m=Jw donde w
es la velocidad angular
.
Entonces se tiene:
( ) cos( ) sin( )
( ) sin( ) cos( )
x
y
q t t dt t a
q t t dt t b
= = = = −
∫
+ +∫
(2.8) donde:( ) desplazamiento angular en
( ) desplazamiento angular en
x y
q t x
q t y
Se puede deducir fácilmente y a b ya que se sabe que: (0) 0 (0) 0 x y q q = =
sustituyendo esto en (2.8) se deduce que:
( ) sin( )
( ) cos( ) 1
x y
q t t
q t t
=
= − + (2.9)
Esto da la respuesta impulsorial del sistema. Transformando por Laplace se tiene:
2
( ) 1
( ) 1
x q s
F s = s + (2.10)
3
( ) 1
( )
y
q s
F s = s +s (2.11)
Finalmente, en [1] las funciones de trasferencia para el giroscopio ECP modelo 750 sin tomar en cuenta fricción y con balanceo perfecto, están dadas por:
2 ( ) ( ) x
q s A
F s = Bs +C (2.12)
3
( )
( )
y
q s D
F s = Es +Fs (2.13)
donde:
1
, , , , , constantes definidas a partir de las masas inerciales
y la velocidad w (Tabla I.I), especificas del giroscopio
A B C D E F=
2.2 MODELACIÓN
La estructura del modelo en Matriz Función de Transferencia (MFT) del Giroscopio es la siguiente –véase figura 1.1-:
1
2
3
4
11 12
21 22 1
31 32 2
41 42
w G G
q G G T
q G G T
donde:
2
3
4
1
angulo del eje 2 en grados
angulo del eje 3en grados
angulo del eje 4 en grados
velocidad del disco en q q q grados w seg = = = =
1 Torque aplicado al disco (via el voltage aplicado a motor1)
2 Torque aplicado al eje 2 (via el voltage aplicado a motor 2) T
T =
=
En [1] se reporta un modelo lineal, en espacio de estado, para el giroscopio modelo 750 obtenido de manera teórica, esto es, aplicando la teoría de mecánica del movimiento angular asumiendo fricción nula en los rodamientos y un balanceo perfecto de los componentes, en el punto de
operación de q2 =q3 =q4 =0 grados y w1=480RPM .
2 2 3 3 4 4 1 1 2 2 3 3 4 4
0 0 0 0 1 0 0 0 0
0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 1 0 0
1
0 0 0 0 0 0 0 0
2
0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
q q
q q
q q
T
w w Cd
T
Ca w Ce
w Cf w w Cc w w • • • • • • • ⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎡ ⎢ ⎥ =⎢ ⎥⎢ ⎥+⎢ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎢ ⎥ ⎣ ⎦⎣ ⎦ ⎣ ⎣ ⎦ ⎤ ⎢ ⎥ ⎣ ⎦ ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥⎦ (2.15) donde: ( ) 1 1 Jd Ca Ic Id
Jb Jc Jd
Cc
Jd Jb Jc
Cd Ic Id Ce Jb Jc ⋅ Ω = + + + = + = + − = +
Ji,Ki,Ii = Momentos inerciales de los componentes del giroscopio.
con i=a, b, ó c
A partir del modelo en espacio de estados (2.15) se puede obtener la MFT (matriz función de
transferencia) asumiendo como variables de salida a ( ). En este punto cabe resaltar
que se tienen puntos de operación que varían en relación a las variables , el sistema no
presenta variaciones con respecto a . En el presente proyecto se estudia el control del
giroscopio en tres puntos de operación con respecto a la variable .
1 2 3 4
w q q q
1 2 3
w q q
4 q
Por otro lado, este modelo, como se mencionó anteriormente, no toma en cuenta la existencia de fricción y desbalanceos en el proceso, por lo cual existen diferencias significativas entre los datos obtenidos en tiempo real y los que se obtienen de simulaciones digitales usando la MFT.
Este efecto se puede observar en la figura 2.2, donde se puede ver la respuesta de a una
entrada del tipo senoidal en T2. La figura 2.2 muestra la respuesta en tiempo real con un periodo
de muestreo trada:
2( q kT)
eg a la en
0.00884
T = s
2( ) sin(20 t)
T t = ⋅
π
(2.16)Fig. 2.2 respuesta en lazo abierto de 2
2
( ) ( )
q z
T z con T2 igual a (2.16)
segundos
En este caso, la función de trasferencia en tiempo continuo que corresponde la discretización
2( )
22( ) 2( )
q z
G z
T z = , obtenida de (2.15), esta dada por
2
2
( ) 10.25
22( )
2( ) 589.2
q s
G s
T s s
= =
+ (2.17)
Como se puede observar, los datos experimentales no corresponden con lo que indicaría el modelo linealizado reportado en [1] ya que este tiene un par de polos complejos estrictamente imaginarios, es decir, es un oscilador puro.
Finalmente, debido a desbalanceos y a la presencia de amortiguamientos en la planta real, se decidió realizar una identificación del proceso que permita generar un modelo que incluya dinámicas que pudieran dificultar el posterior diseño e implementación de los controladores. La estrategia seleccionada es la aplicación del algoritmo Mínimos Cuadrados Recursivos con Factor de Olvido. Los resultados se validaron mediante análisis frecuencial y cálculo de error cuadrático medio.
Por otro lado , se seleccionaron 3 puntos de operación para la identificación q2=20o, q2=0o y
movimiento en q2 de ±15o es suficiente para aplicaciones automovilísticas. Además, el hecho de
que el punto de operación no dependa de q4 permitirá tener un rango de operación aún más
amplio en esta variable. Los puntos de operación de q3 y w1 se seleccionaron de tal forma que se
conservara el efecto de la presesión en el dispositivo.
2.2.1 ESTIMACIÓN CON MÍNIMOS CUADRADOS CON FACTOR DE OLVIDO.
El método usado para la estimación del modelo en los diferentes puntos de operación fue el de Mínimos Cuadrados con Factor de Olvido (MCFO). Este método tiene como finalidad minimizar el error cuadrático medio entre el modelo estimado y los datos experimentales. Para realizar el
proceso de estimación se hizo la elección de un periodo de muestreo . La
elección de este periodo de muestreo se realizó basándose en que era el menor tiempo de
muestreo que se podía elegir para fines prácticos. En [1] se reporta que la complejidad y
extensión del programa de control está directamente limitada por el tiempo de muestreo, un tiempo de muestreo menor significa un programa más limitado. Este tiempo de muestreo es suficientemente pequeño para representar frecuencias muy superiores a los anchos de banda deseados –355rad/s contra 8rad/s- y suficientemente grande para permitir controladores moderadamente complejos. Como nota adicional, el dispositivo solo permite usar tiempos de muestreo que sean múltiplos de 0.000884 seg.
0.00884
T = seg
Sea el modelo de regresión:
1
( ) T i
y t =
θ
Φ− (2.18)donde θ es el vector de parámetros y Φ el vector de regresión:
1 2 1
( 1) ( 2) ( ) [ ] ( 1) ( 2) ( ) T
n m i
y i
y i
y i m
u i
u i
u i n
θ θ θ θ + − − ⎡ ⎤ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ = Φ = ⎢ ⎥ − ⎢ ⎥ − ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ − ⎢ ⎥ ⎣ ⎦ …
Si se define la función de costo:
2
1 1
1
ˆ parametros estimados
T t
t
i
K i i
i K i
K J Y K
λ
θ
λ
λ
θ
∧ − − = = ⎡⎛ ⎞⎛ ⎞ ⎤ ⎢ ⎥ = ⎜ ⎟⎜ − Φ ⎟ ⎢⎝ ⎠⎝ ⎠ ⎥ ⎣ ⎦ = ∀ =∑ ∏
(2.19)Usando el algoritmo de MCFO es posible estimar el vector ˆθ a partir de datos experimentales. A
1 1 1 1 1
1 1 1 1 1 ( ) 1 1 T
i i i i i i i
T
i i i i
i i T
i i i
F Y F F F F F θ θ λ θ λ ∧ ∧ ∧ − + − − − − − + − − = + Φ − Φ ⎡ Φ Φ = ⎢ − ⎥ + Φ Φ ⎣ ⎦ ⎤ (2.20) donde:
= Factor de olvido. 0 1
λ 〈 〈λ
La principal diferencia entre MCFO y el método de los mínimos cuadrados tradicionales, consiste
en que es recursivo y en la existencia de un factor λ o factor de olvido.
De las ecuaciones (2.20) se puede extraer el término que representa el error de estimación.
1 1
(
T t
t t t
e Y θ
∧
− −)
= − Φ (2.21)
Las condiciones a cumplir para lograr limet →0 son [2]:
Estabilidad BIBO (bounded input bounded output) Rango de operación limitado (Para sistemas no lineales) Conocimiento de la estructura del proceso
Señal de excitación persistente a la entrada.
2.2.1.1 Estabilidad BIBO y rango de operación
Las dos primeras condiciones, BIBO y rango de operación, presentaron dificultades en lazo abierto ya que, como se mostró anteriormente, el sistema tiene desbalanceos que tienden a moverlo fuera de los rangos de operación deseados -comportamiento que asemeja una
inestabilidad, ver figura 2.2-. Este problema se observó en q2 y q3 principalmente.
Para resolver este problema se utilizaron controladores tipo PD y PID diseñados sin ningún requerimiento además de mantener todas las salidas del sistema dentro de los rangos de operación
deseados y proporcionar señales de entrada y salida acotadas dentro de un rango. El diseño de
estos controladores se hizo de forma heurística usando análisis frecuencial.
El proceso de identificación consistió en los siguientes pasos y casos:
Identificación de G22 y G42 con control PD en q2, con todos los demás ejes fijos.
Diseño de mejores controladores para q2 y q4 con base a modelos identificados.
Identificación de G22 y G42 con nuevos controles en y , con todos los demás ejes
fijos.
2
q q4
Identificación de G11 y G13 con control PD en q3, con todos los demás ejes fijos.
Diseño de mejores controladores para w1 y q3 con base a modelos identificados.
Identificación de G11 y G13 con nuevos controles y , con todos los demás ejes
fijos.
1
o En los primeros pasos para la identificación se tuvo que realizar un proceso
iterativo de identificación-diseño-control-identificación... para poder llegar al punto donde se tenían todas las salidas del sistema controladas y acotadas.
Diseño de controladores PD y PID simples para , , y con base a modelos
identificados.
1
w q2 q3 q4
Identificación de todas las funciones de transferencia sin tener ejes fijos
o Finalmente se controlan todas las variables de salida de manera que estén acotadas
y listas para ser sometidas al proceso de identificación. Las repercusiones de identificar el sistema controlado se discuten en la sección 2.2.1.3
El objetivo de diseñar controladores para cada una de las variables de interés no es el cumplir con requisitos de desempeño ni estabilidad robusta, sino de mantener el punto de operación para cada una de las variables y proporcionar estabilidad BIBO. Sin embargo, se pudieron realizar varias observaciones preliminares acerca de la naturaleza interna del proceso, como el bajo o inexistente
acoplamiento entre q2 y w1 en el punto de operación q2=0 grados.
Finalmente el esquema de control utilizado para la identificación se presenta en la figura 2.3. En esta figura se observa como cada una de las funciones de transferencia que conforman la MFT (2.14) fueron estimadas basándose en datos de entrada/salida para cada uno de los puntos de operación. Los controladores sólo fueron utilizados para cumplir con los requisitos de estabilidad.
En la figura 2.3 también se puede observar como idealmente se desea obtener los datos de entrada/salida para cada función de transferencia individual. Sin embargo, en todos los casos las
señales “medidas” (w1, q2, q3 y q4) representan la suma algebraica de las salidas de dos funciones
de transferencia independientes –p.e. q2 es la suma de G22(s) y G21(s)-. Para lograr una
aproximación a la idealización de la figura 2.3, en todo caso se llevó una de las dos entradas (T1
ó T2) a cero. De esta forma se aproxima la identificación del sistema con solo datos de
entrada/salida de funciones de transferencia individuales.
2.2.1.2 Estructura del proceso
La siguiente condición a cumplir, para el algoritmo de MCFO, es conocer la estructura de la función de transferencia, es decir, el número de polos y ceros. Sin embargo, este es un dato casi nunca conocido. El conocimiento a priori de la estructura del proceso no es posible de manera practica ya que, a pesar de tener un conocimiento previo de la estructura general dada por información de modelado teórico reportado en [1], justamente se pretende que la estimación descubra dinámicas no modeladas, las cuales son desconocidas antes de realizar la estimación. Debido a lo anterior, se utilizó el cálculo del error cuadrático para la determinación de la estructura. Esto es, se realizaron varias estimaciones con diferentes estructuras y se calcularon los
errores cuadráticos 1 2
2 e
⎛ ⎜
⎝
∑
⎠⎞
⎟de cada estimación para seleccionar la estructura con el menor error
Fig. 2.3. Esquema de control/identificación. SPi=señales de excitación
2.2.1.3 Excitación persistente
Finalmente, se tiene que cumplir con la condición de excitación persistente la cual se aproximó utilizando señales cuadradas y senoidales con modulación de frecuencia en rangos muy por arriba de los anchos de banda deseados (8.5 rads/aeg).
Este punto también presenta un problema práctico, ya que no es posible generar señales que tengan altas ganancias para toda frecuencia. Además, la inclusión de un controlador en la estimación, para mantener la estabilidad BIBO, implica también un filtraje de la señal de excitación original.
2.2.2 OBSERVACIONES DE LA IDENTIFICACIÓN EN TIEMPO REAL
A continuación se muestra una simulación del funcionamiento del programa básico de identificación utilizado en Matlab.
1. Se propone una planta en el dominio de Z
a. n=[1, 0.2, -0.4, 0.1]
b. d=[1, 0.1, 0.6, -0.3, 0.7]
2. Se crea una señal de excitación senoidal con modulación de frecuencias. 3. Se simula digitalmente la respuesta de la planta
4. Se utiliza el método de identificación y se le indica que busque hasta siete polos y siete ceros máximo.
5. El programa regresa la siguiente planta estimada a. Ne=[ 0.9999 0.2000 -0.4000 0.0999]
b. De=[1.0000 0.1000 0.6000 -0.3000 0.7000]
Como se puede ver, el error en la estimación de los parámetros es despreciable. Para ilustrar el efecto de ruido dentro del proceso de simulación el programa en Simulink se modificó anexando una señal aleatoria con distribución uniforme a la salida del proceso, como se muestra en la figura 2.4. La media de la señal aleatoria se encuentra idealmente en cero, sin embargo, en la práctica, la media no se encuentra exactamente en cero; esto tiene un efecto sobre la ganancia en estado estacionario que se describe más adelante. Nótese que esta simulación sirve sólo para ilustrar el efecto que el ruido puede tener en la identificación de un proceso real. Queda claro que en la identificación de un proceso real no se conoce el ruido.
Fig. 2.4 Esquema de estimador con ruido.
1. Se toma la misma señal de la simulación digital y se le agrega ruido aleatorio del 10% de la amplitud máxima de la señal de entrada.
2. Se utiliza el método de identificación y se le indica que busque hasta siete polos y siete ceros máximo.
a. Nr=[ 0.3089]
b. Dr=[ 1.0000 -0.7479 1.0550 -0.8462 1.2180 -0.9038 0.3120 -0.1066]
Fig. 2.5 Comparación entre estimación (punteada) y sistema original (continua).
Nótese como la estimación identifica dinámicas similares a las originales en ganancia pero no así en fase.
Si se reduce la amplitud del ruido a un 5% de la señal de entrada, se obtiene la siguiente estimación:
Nr=[ 0.9614 0.1241 -0.6325 -0.0854]
Dr=[ 1.0000 0.0389 0.4894 -0.4116 0.6541]
Y su correspondiente respuesta en frecuencia en la figura 2.6:
Fig. 2.6 Comparación entre estimación (punteada) y sistema original (continua)
Finalmente con un ruido del 1% de la amplitud máxima de la señal de entrada se tiene la siguiente estimación
Nr=[ 0.9894 0.2014 -0.4221 0.0938]
Dr=[ 1.0000 0.0952 0.5940 -0.3056 0.6993]
Y su correspondiente respuesta en frecuencia en la figura 2.7:
Fig. 2.7 Comparación entre estimación (punteada) y sistema original (continua)
En el último caso las respuestas en frecuencia son prácticamente idénticas.
Esto lleva a notar la influencia del ruido sobre la eficacia del algoritmo MCFO, lo cual se tomó en cuenta posteriormente en el proyecto. Además, MCFO presenta un gran rechazo al ruido con distribución uniforme [2], sin embargo, en los casos anteriores la media no se encontraba exactamente en cero, lo cual resulta, efectivamente, en un efecto tipo “offset”. Por ejemplo, en el caso del ruido del 5%, se observan errores en frecuencias bajas (estado estacionario) mientras que en frecuencias altas se tiene un error pequeño.
Finalmente, es posible pensar en ruidos menores al 5% en las señales medidas debido a la alta precisión de los codificadores ópticos digitales y sistemas de adquisición de datos con los que cuenta el sistema.
Además del uso de MCFO para la estimación de los modelos, también se uso otra técnica para el ajuste final de algunos de los modelos obtenidos. El algoritmo de mínimos cuadrados es altamente sensible a componentes de alta frecuencia los cuales pueden deberse a:
La figura 2.8 muestra el diagrama de Bode de una función de transferencia estimada con MCFO (línea punteada) contra la función de transferencia correspondiente obtenida del modelo reportado en [1] que no toma en cuenta fricciones (línea continua). Como se puede apreciar, el modelo estimado contiene una gran cantidad de dinámicas en altas frecuencias. Nótese además, que la estimación indica que el sistema no tiene un integrador como lo indica el modelo de [1] sino un polo lento de alta ganancia, esto se discute más adelante, en este punto se discute la relevancia de las dinámicas de alta frecuencia.
Fig. 2.8 Comparación entre estimación (punteada) y modelo lineal (continua) de [1]
Debido a la alta frecuencia en la que se encuentran y a las bajas ganancias que presentan, con relación a las otras dinámicas, es posible eliminarlas del modelo si se toman las siguientes consideraciones:
i. Se garantiza su atenuación limitando el ancho de banda del sistema en lazo cerrado.
ii. Las dinámicas presenten ganancias bajas
Para eliminar las dinámicas no deseadas se utilizó la función “modred” de Matlab que permite eliminar estados discriminándolos mediante sus gramianas. El comando “modred” da la opción de eliminar estados y presenta también la gramiana de cada uno de ellos; entonces, se pueden eliminar los estados que presenten las menores gramianas.
Fig. 2.9 Comparación de modelo estimado reducido (punteada) con modelo lineal (continua) de [1]
Como se puede observar, usando el método de reducción de orden se obtiene un modelo que no presenta las dinámicas de alta frecuencia que pueden ser causadas por ruido, reduciendo la complejidad del modelo y manteniendo, al mismo tiempo, las dinámicas principales del sistema. Así mismo, el orden del modelo estimado presentado en la figura 2.8 era igual a 18 y el orden del modelo estimado reducido presentado en la figura 2.9 es igual a 4.
Por otro lado, en [3] se muestra cómo la cota superior del error generado por el truncamiento de un estado en una realización balanceada esta dada por:
( ) ( ) 2
donde:
valor de la gramiana del estado truncado
( ) modelo original
( ) modelo reducido
maximo valor sigular (cota superior)
r
r
G jw G jw g
g G jw G jw
σ
σ
⎡ ⎤
⎣ − ⎦≤
= =
= =
(2.22)
Nótese que no es posible determinar en este punto cuáles de estas dinámicas de alta frecuencia, presentes en el modelo estimado, se deben a la sensibilidad del algoritmo de mínimos cuadrados al ruido, y cuales se deben a dinámicas reales presentes en la planta. Por lo tanto, sólo es posible eliminarlas si se toman en consideración los puntos i-ii anteriormente presentados y tomando en cuenta que la cota dada por la ecuación (2.22) sea pequeña.
una entrada tipo senoidal modulada en frecuencia. Como se puede apreciar, las señales de salida
están acotadas. Por otro lado, la entrada también se encuentra acotada a por parte del
sistema electromecánico. De tal forma que se cumple con los requisitos del algoritmo de MCFO.
10V
±
Fig. 2.10 Comparación entre estimación (continua) y datos experimentales (punteada)
2.2.3 MODELOS OBTENIDOS
A continuación se presentan los modelos obtenidos, así como una comparación en frecuencia con los modelos lineales dados en [1]. Se puede observar que las diferencias principales se encuentran en la presencia de amortiguamientos que no estaban presentes en el modelo reportado en [1].
Es importante recalcar que en esta sección sólo se presentan los datos obtenidos a partir de la estimación y la reducción de orden. En secciones posteriores de este capítulo, se presentan descomposiciones sobre la estructura del modelo. Los modelos finales, en los tres puntos de operación son presentados en la sección 2.6
Las siguientes funciones de transferencia se estimaron en el punto de operación q2=0o q3=0o y
w1=480rpm. Así mismo, se hace una comparación en frecuencia entre los modelos continuos
G11(s)= G11(z)=
Funciones de transferencia G11
G22(s)= G22(z)=
G31(s)= G31(z)=
Funciones de transferencia G31
G42(s)= G42(z)=
Las funciones de transferencia G12, G21, G32 y G41 son nulas en este punto de operación, tanto como en el modelo teórico como en las estimaciones. En las estimaciones no fue posible encontrar ninguna relación entrada/salida y cualquier variación se debe a la existencia de la no linealidad. Esto implica la inexistencia del acoplamiento en este punto específico. Se estimó
también en el punto de operación q2=20o q3=0o y w1=480rpm. En este punto de operación se
puede observar la no-nulidad de G12, G21, G32 y G41.
A continuación se presentan cada una de las funciones de trasferencia para el punto de operación =20 grados. Así mismo se hace una comparación entre los modelos de [1] (línea continua) para el mismo punto de operación y los obtenidos a partir de la estimación (línea punteada). También se pueden ver los diagramas de Bode correspondientes.
2 q
G11(s)= G11(z)=
G12(s)= G12(z)=
Funciones de transferencia G12
G21(s)= G21(z)=
G22(s)= G22(z)=
Funciones de transferencia G22
G31(s)= G31(z)=
G32(s)= G32(z)=
Funciones de transferencia G32
G41(s)= G41(z)=
G42(s)= G42(z)=
Funciones de transferencia G42
Finalmente, para el punto de operación q2=-20o q3=0o y w1=480rpm sólo se aprecia un cambio de
signo, manteniendo los otros parámetros, en las funciones de transferencia G21, G41, G32 y G12
con respecto a las mismas funciones para el punto q2=20o, q3=0o y w1=480rpm. Las otras
funciones de transferencia (G11, G22 G31 y G42) se mantienen iguales a las del punto q2=20o.
Este fenómeno, de simetría del aparato, se observa también con los modelos lineales de [1] en estos dos puntos de operación.
2.3 ANÁLISIS DEL MODELO.
2.3.1 ESTRUCTURA DEL MODELO
Para los puntos de operación =20 grados y =-20 grados, las funciones tienen
una magnitud muy pequeña –por debajo de 0dB- en todo el rango de frecuencias. Esto se debe en parte, a que, recordando la estructura del giroscopio, el Torque 1 se aplica de manera ortogonal al
ángulo y el Torque 2 se aplica de manera ortogonal al ángulo . Debido a esto, las funciones
de trasferencia se deben sólo al efecto de la presesión. En realidad si el disco del
giroscopio no esta rotando, estas relaciones se nulifican totalmente. Las dinámicas que estas funciones representan, están altamente relacionadas con la fricción, de ahí la diferencia entre las
2
q q2 G21 y G12
2
q q1
21 y 12
funciones dadas en [1], donde no se toma en cuenta la fricción, y las obtenidas mediante la estimación.
21 y 12
G G
Experimentalmente, la magnitud de las salidas , con respecto a los torques T2 y T1
respectivamente, es tan baja que es difícil diferenciar el efecto de perturbaciones y ruidos de las dinámicas de la planta.
1 y w q2
En general, debido a su baja ganancia, estas funciones de transferencia son despreciables, por lo cual los modelos para estos puntos de operación quedan con la siguiente estructura:
1
2
3
4
11 0
0 22 1
31 32 2
41 42
w G
q G T
q G G T
G G q ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ ⎢= ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (2.23)
Recordando la estructura del giroscopio, la Torca 1 se aplica de manera ortogonal al ángulo y
la Torca 2 se aplica de manera ortogonal al ángulo , sin importar el punto de operación. Esto
es, la Torca 1 no afecta de manera directa al ángulo y viceversa. Además, los cuerpos de los
ángulos son los únicos que están directamente acoplados a los motores que generan las
torcas 1 y 2 respectivamente.
2 q 1 q 2 q 1 y q q2
4
El efecto de la torca 2 sobre ángulos diferentes a depende de la presesión y de la ley de la
conservación del momento. Así mismo el efecto de la torca 1 sobre ángulos diferentes a depende también de la presesión y de la ley de la conservación del momento. Entonces, se tienen dos arreglos mecánicos como los que se presentan en la figura 2.11:
2 q 1 q Ángulo 1 2 q q Torca 1
2 Otros componentes
mecánicos (fricciones, masas inerciales, etc.)
Fig. 2.11 Diagrama mecánico del giroscopio
Entonces, es posible determinar que todos los efectos de las torcas 1 y 2 sobre los ángulos
pueden ser medidos a partir de los ángulos .
3
q y q q y q1 2
En la figura 2.12 se presenta la estructura 4x2 que representa al giroscopio tomando en cuenta
que G21 y G12 son despreciables. En este caso los diagramas de bloques presentan funciones de
Fig. 2.12 Diagrama de bloques del giroscopio
Tomando en cuenta que todos los efectos de las torcas 1 y 2 sobre los ángulos pueden ser
medidos a partir de los ángulos entonces se puede descomponer la figura 2.12 en la
figura 2.13.
3 q y q4
2 1 q y q
Donde las nuevas funciones de transferencia G11a, G21a, G22a y G12a representan a las
relaciones salida/entrada 3( ), 4( ), 4( ) 3( )
1( ) 1( ) 2( ) 2( )
q s q s q s q s
y
w s w s q s q s respectivamente. Representaciones
continuas de las funciones de transferencia G11a, G21a, G22a y G12a, para los diferentes puntos
de operación, pueden ser encontradas en la sección 2.6. Cabe mencionar que las funciones de
transferencia G11a, G21a, G22a y G12a se obtuvieron a partir de la identificación de los datos de
salida/entrada correspondientes.
A partir de este diagrama es posible reconocer claramente la interconexión de dos sistemas SISO seguidos de un sistema 2x2 como el que se presenta en la figura 2.14.
Fig. 2.14 Giroscopio representado por 2 sistemas SISO en serie con sistema MIMO 2x2
Finalmente esta nueva estructura será de gran utilidad en el diseño de controladores lineales y análisis del modelo con las herramientas de ICD que se llevará a cabo en el capítulo 3.
Para el punto de operación =0 muchas de las funciones de transferencia son despreciables por
lo cual queda la siguiente estructura:
2 q 1 2 3 4 11 0
0 22 1
31 0 2
0 42
w G
q G T
q G T
G q ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ ⎢= ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (2.24)
Con lo cual en realidad se obtienen dos sistemas de 2x1 de la forma:
[ ]
1 3 11 1 31 w G T q G ⎡ ⎤ ⎡ ⎤ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦⎣ ⎦ y