INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
DISEÑO DEL SISTEMA DE CONTROL PARA ORIENTAR
MÓDULOS FOTOVOLTAICOS
T E S I S
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS
CON ESPECIALIDAD EN INGENIERÍA MECÁNICA
PRESENTA:
ING. AIRAM VERÓNICA CURTIDOR LÓPEZ
DIRIGIDA POR:
M. EN C. CÁNDIDO PALACIOS MONTÚFAR
DR. JESÚS ALBERTO MEDA CAMPAÑA
CARTA CESIÓN DE DERECHOS
En la Ciudad de México, D.F. el día _05_ del mes de _Diciembre__del año_2012_, el (la)
que suscribe _AIRAM VERONICA CURTIDOR LÓPEZ_alumno(a) del Programa de
_MAESTRÍA EN CIECIAS CON ESPECIALIDAD EN INGENIERÍA EN INGENIERÍA
MECÁNICA_, con número de registro_B102174_, adscrito(a) a la
_SECCIÓN DE
ESTUDIOS DE POSGRADO E INVESTIGACIÓN DE LA E.S.I.M.E UNIDAD
ZACATENCO_
, manifiesto(a) que es el (la) autor(a) intelectual del presente trabajo de
Tesis bajo la dirección del (de la, de los)
_M. EN C. CÁNDIDO PALACIOS
MONTUFAR Y DR. JESÚS ALBERTO MEDA CAMPAÑA_
y cede los derechos del
trabajo titulado _DISEÑO DEL SISTEMA DE CONTROL PARA ORIENTAR
MÓDULO FOTOVOLTÁICOS_, al Instituto Politécnico Nacional para su difusión, con
fines académicos y de investigación.
Los usuarios de la información no deben reproducir el contenido textual, gráficas o datos
del trabajo sin el permiso expreso del (de la) autor(a) y/o director(es) del trabajo. Este
puede ser obtenido escribiendo a las siguientes [email protected]_. Si
el permiso se otorga, el usuario deberá dar el agradecimiento correspondiente y citar la
fuente del mismo.
Airam Verónica Curtidor López
RESUMEN
Actualmente el alto consumo de energía eléctrica y el déficit de hidrocarburos para
atender la demanda global, así como la necesidad de reducir la emisión de gases
contaminantes, ha motivado a la búsqueda de nuevas formas de generar energía
eléctrica, para ello se han desarrollado nuevas tecnologías que emplean el uso de
energías limpias o también conocidas como energías renovables. En este trabajo
de tesis se emplea la energía solar como fuente generadora de energía eléctrica,
la cual es obtenida con la ayuda de sistemas de conversión es decir módulos
fotovoltaicos.
Por lo anterior en este trabajo se implemento el control de un mecanismo de dos
grados de libertad con la finalidad de seguir la posición del sol durante el día
(Este-Oeste) así como durante el año (Norte-Sur), para aumentar la eficiencia de
los módulos fotovoltaicos en cuanto a captación solar y con ello incrementar la
generación de potencia eléctrica.
El proyecto consiste en controlar la posición angular de dos mecanismos que
guían el movimiento de los módulos fotovoltaicos. Mediante un sensor solar
comercial se realiza el seguimiento de la trayectoria del sol durante el día y a lo
largo del año, la señal de este sensor será utilizada para controlar dos
motorreductores monofásicos, y con ello dar la orientación apropiada a los
módulos fotovoltaicos, la energía solar captada será convertida mediante los
módulos en corriente directa la cual será almacenada en un banco de baterías,
para posteriormente mediante el uso de un inversor convertir la corriente de CD
(corriente directa) a corriente de CA (corriente alterna), necesaria para alimentar
los motores que posicionan tres concentradores solares cilíndricos parabólicos y
para uso domestico.
Los módulos fotovoltaicos están montados en una estructura cuadrada formada
por perfiles de PTR. Para lograr los dos movimientos independientes Este-Oeste
y Norte Sur, se implemento dos estructuras cuadradas, donde una de ellas soporta
los módulos y permite el movimiento en la dirección Este-Oeste, mientras que la
estructura colocada en la parte inferior a los módulos permite el movimiento en la
dirección Norte-Sur.
Para controlar el mecanismo se diseño el sistema de control a través de una
técnica llamada ubicación de polos, para ello previamente se desarrollo el modelo
matemático del sistema y se realizó la simulación en computadora del
comportamiento de este con dicho control.
La implementación del control se logró con la ayuda de un sensor solar comercial
que mide los cambios transitorios de la intensidad de la luz a través de 6
fotodiodos sensibles a la incidencia de la luz solar. Esta señal es enviada a un
PLC el cual enviara las órdenes a los dos motores para alcanzar la posición
deseada.
ABSTRACT
Currently the high consumption of electricity and oil deficit to meet global demand
and the need to reduce polluting gas emissions, has motivated to search new ways
to generate electricity and therefore humans have developed new technologies
employing the use of clean energy also known as renewable energy. In this thesis
work, solar energy is used as a source of electrical energy which is obtained with
the help of conversion systems also known as photovoltaic modules.
Therefore in this paper we implement a control for a mechanism with two degrees
of freedom in order to track the position of the sun during the day (East-West) and
the year (North-South), to increase photovoltaic modules
’
efficiency in terms of
solar catchment and thereby increase the generation of electrical power.
The project is to control the angular position of two mechanisms that guide the
movement of the PV modules. A commercial solar sensor was used, it was
employed to track the path of the sun during the day and throughout the year, this
sensor signal is used to control two-gearmotors and thus give appropriate
guidance to the photovoltaic modules, the energy captured by solar modules will
be converted to direct current which is stored in a battery bank and with the aid of
an inverter, this is converted into AC (alternating current), needed to feed the
motors that move three cylindrical parabolic solar concentrators and for domestic
use.
The photovoltaic modules are mounted on a structure composed of square profiles
PTR. To achieve the two independent movements East-West and North-South, two
square structures were implemented, where one of them supports the modules and
allows movement in the East-West direction, while the structure placed on the
bottom of the modules allows the North-South direction movement.
These two structures are supported by two towers at their sides, where we
installed a worm gear transmission to reduce the speed of a motor 1750 rpm to
0.465 rpm which helps smooth positioning.
A control system was designed through a technique called pole placement to
control the mechanism and the mathematical model of the system and its computer
simulation was developed.
photodiodes sensitive to the incidence of sunlight. This signal is sent to a PLC
which will send orders to the two motors to achieve the desired position.
ÍNDICE GENERAL
II OBJETIVOS.
III JUSTIFICACIÓN.
IV PLANTEAMIENTO DEL PROBLEMA.
CAPÍTULO I. Estado del Arte.
1.1 Módulos fotovoltaicos.
1.1.1 Energía solar.
1.1.2 Ventajas del uso de energía solar.
1.1.3 Desventajas del uso de energía solar.
1.2 Antecedentes históricos.
1.2.1 Aprovechamiento de energía solar en México.
1.3 Energía solar fotovoltaica.
1.4 Clasificación de paneles solares en función del material.
1.5 Clasificación de paneles solares en función de su forma.
1.6 Clasificación de paneles solares por su sistema de
seguimiento solar.
CAPÍTULO II. Modelado dinámico.
2.1 Modelo matemático.
2.2 Cinemática directa.
2.2.1
Representación de Denavit- Hartenberg
.
2.3 Dinámica.
2.3.1 Modelo Dinámico de Lagrange-Euler.
2.3.2 Velocidades de las articulaciones.
2.3 3 Energía cinética.
2.3.4 Energía potencial.
2.3.5Ecuaciones de movimiento del marco con
articulaciones giratorias.
CAPÍTULO III. Diseño del sistema de control.
3.1
Representación en el espacio de estados.
3.2 Linealización.
3.3 Diseño por ubicación de polos.
3.3.1 Condición necesaria y suficiente para la ubicación
arbitraria de polos.
3.3.2 Pasos para el diseño de la ubicación de los polos
3.3.3 Asignación de polos robusta.
3.4
Implementación del control en SimMechanics.
3.5
Implementación del control con modelo matemático.
CAPÍTULO IV. Implementación del sistema de control.
4.1
Descripción del sistema eléctrico.
4.1.1
Módulos fotovoltaicos.
4.1.2 Banco de baterías.
4.1.3 Cargador de batería solar.
4.1.4 Inversor Conermex.
4.1.4.2 Panel y ubicación de controles e
indicadores luminosos.
4.1.5 Sensor solar.
4.1.6 Controlador de sensor solar.
4.1.7 Gabinete de control de movimiento Norte-Sur
Este-Oeste.
4.1.7.1 Contactores EATON XTCE009B 10-24 V.
4.1.7.2 Interruptor Termomagnético Moeller
XpolePLS-C16.
4.1.7.3 Fuente AG QC-INS 115 VCA-230
VCA 24 VCD.
4.1.7.4 Relevador SCHRACK RA 460-615.
4.1.7.5 Controlador Lógico Programable Moeller
easy-DTCX.
4.2 Descripción de la parte mecánica.
4.2.1
Motor siemens 1750 RPM 1 hp.
4.2.2 Transmisión de cuatro barras.
4.3 Descripción del sistema de control.
4.3.1 Programación y comunicación.
4.5 Diagramas de conexiones eléctricas.
CAPÍTULO V. Análisis de resultados.
5.1 Introducción.
5.2
Marco inferior (eje Norte-Sur) enfocado.
5.3
Marco superior (eje Este-Oeste) enfocado.
5.4
Marco superior e inferior desenfocados.
5.5 Marco superior e inferior enfocados.
5.6 Análisis económico.
5.7 Conclusiones.
5.8 Trabajo futuro.
Apéndice A
Apéndice B
Apéndice C
Apéndice D
Apéndice E
Bibliografía
102
103
104
106
111
114
124
115
ÍNDICE DE FIGURAS
1.1. Parque solar instalado en España (47.6 MW).
1.2. Celdas solares monocristalinas.
1.3. Celdas solares multicristalinas.
1.4. Módulos solares
1.5. Paneles solares con superficies reflejantes
1.6. Paneles solares con forma de teja
1.7. Paneles solares con forma de teja
1.8. Paneles solares bi-fasiales
1.9 Concepto de un eje tres posiciones
1.10 Diagrama esquemático de un sistema de un eje tres posiciones
1.11 Esquema del sensor de posición solar
1.12 Diagrama a bloques de sistema de seguimiento
1.13 Esquema de seguimiento
1.14 Representación grafica de operación de un colector plano
contra un sistema de concentración solar
1.15 Esquema de sistema de seguimiento solar
1.16 Diagrama a bloques de un sistema de seguimiento solar
2.1. Mecanismo de dos grados de libertad
2.2. Parámetros de Denavit-Hartenberg
2.3. Movimiento del modulo fotovoltaico en la dirección este-oeste
2.4. Movimiento del modulo fotovoltaico en la dirección norte-sur
2.5. Ejes de giro y centros de masa del sistema
2.6 Asignación de referencias para marco inferior
2.7. Asignación de referencias para marco superior
2.8 Modelo del sistema en Sim-Mechanics
2.9. Esquema del sistema en Sim-Mechanics
2.10 Esquema del sistema en movimiento
2.11 Sistema sin mecanismo de cuatro barras
2.12 Comportamiento dinámico del marco inferior
2.13 Comportamiento dinámico del marco superior
3.1. Sistema de control de lazo abierto
3.2. Sistema de control de lazo cerrado con u=-kx
3.3. Diagrama a bloques del control del sistema en SimMechanics
3.4. Modelo en SimMechanics inicializado
3.5. Modelo en SimMechanics 1= -49º 2=-23º
3.6. Resultado de control de posición 1=-49º
3.7. Resultado de control de posición 2=-23º
3.8. Comportamiento de los pares u
1y u
2con Sim-Mechanics
3.9. Diagrama a bloques del control del sistema en SimuLink
3.10. Resultados del control del sistema en SimuLink
3.11. Resultados del control del sistema en SimuLink 1=-49º
3.12. Resultados del control del sistema en SimuLink 2=-23º
3.13 Resultados de u
1y u
2con SimuLink
4.1.
Modulo Fotovoltaico ERDM SOLAR “TP6”
4.2. Modulo Fotovoltaico ERDM SOLAR “TP6”
4.3 Curva característica en función a la corriente-voltaje
4.4. Curva característica en función a la potencia-voltaje
4.5. Banco de baterías
4.6. Cargador de Tri Star
4.7 Diagrama de conexión para carga solar y control de carga
4.8. Inversor de onda senoidal de onda modificada
4.9. Controles de inversor Conermex
4.10. a) Vista lateral del sensor b) Vista superior del sensor
4.11. Controlador del sensor
4.12 Gabinete de control de movimiento Norte-Sur, Este-Oeste
4.13 Contactores EATON XTCE009B
4.14 Interruptor Termomagnético Moeller Xpole PLS-C16
4.15 Configuración de colores de Interruptor Termomagnético Moeller
4.16 Diagrama eléctrico de la botonera arranque y paro con el
relevador de enclave
4.17 Relevador de enclave
4.18 Partes principales de PLC Moeller 822 DC-TCX
4.19 PLC Moeller
4.20 Motor para accionar el marco Norte-Sur
4.21Transmisión para marco Este-Oeste
4.22 Software Easy Soft-Pro
4.23 Pantalla de inicio del software Easy Soft-Pro
4.24 Lista de los diferentes PLC
4.25 Selección del modelo del PLC al espacio de trabajo
4.26 Selección de la versión del PLC
4.27 Esquemas de contactos
4.28 Programa empleado en el control
4.29 Programa para colocar módulos en posición horizontal
4.30 Protocolo de comunicación del PLC
4.31 Interfaz para enviar datos de la PC al PLC
4.32 Alimentación principal
4.33 Alimentación del PLC y el Controlador Solar
4.34 Entradas y salidas del PLC
4.35 Entradas y salidas de controlador de sensor solar
4.36 Diagrama eléctrico del circuito de potencia
5.1 Colocación del sensor solar en el sistema de seguimiento solar
5.2. Numeración de módulos
5.3. Marco inferior (Norte-Sur) enfocado
5.4. Marco (eje Este-Oeste) enfocado
5.5. Ambos ejes desenfocados
5.6. Medición de corriente con los módulos desenfocados
5.7. Ambos ejes enfocados
5.8. Medición de corriente con los módulos enfocados
5.9. Medición de corriente en baterías con los módulos
desenfocados
5.10 Medición de corriente en baterías con los módulos enfocados
5.11. Ángulo de inclinación marco inferior
5.12. Lecturas de la inclinación para el eje Norte-Sur
5.13. Lecturas de la inclinación para el eje Este-Oeste
92
93
94
95
96
97
97
98
98
100
101
ÍNDICE DE TABLAS
2.1. Parámetros de Denavit-Hartenberg
2.2. Parámetros de Denavit-Hartenberg del sistema real
2.3 Parámetros físicos de marco inferior
2.4 Parámetros físicos de marco superior
4.1. STC: Irradiancia 1000 W/m
2, Temperatura del Modulo 25º,
AM=1.5
4.2. Características Mecánicas
4.3 Parámetros Eléctricos
4.4. Dimensiones de baterías ROLLS
4.5. Características de las terminales y de la estructura
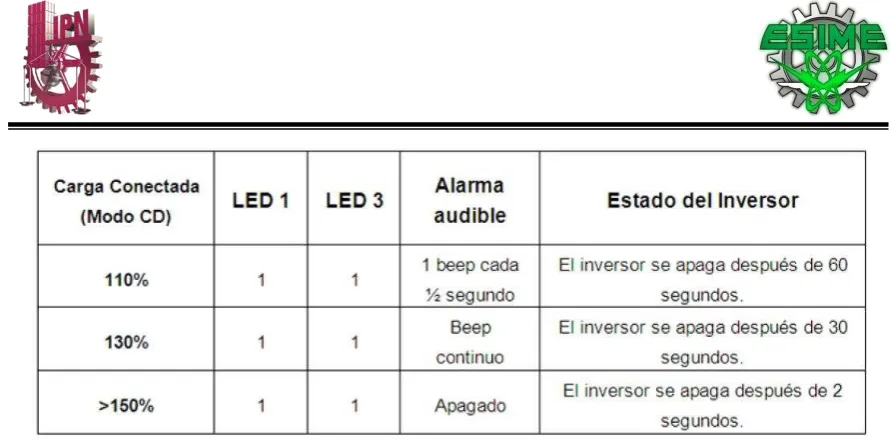
4.7 Indicadores luminosos de inversor cargador de 24 V de la serie
SM
4.8. Descripción de las alarmas por sobrecarga
4.9. Indicadores de estado de carga
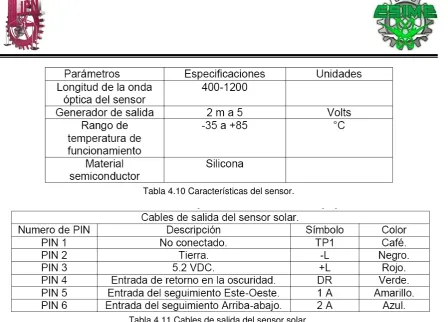
4.10. Características del sensor
4.11. Cables de salida del sensor solar
4.12 Especificaciones eléctricas del control de seguimiento
4.13 Características de los elementos del control de seguimiento
4.14 Calibraciones de ángulo Este-Oeste, Arriba-Abajo
4.15 Especificaciones eléctricas de la fuente
4.16 Especificaciones técnicas del PLC MOELLER
4.17 Especificaciones del motor
4.18 Tabla de selección para interruptor termomagnético
5.1 Resultados marco inferior enfocado
5.2. Resultados marco superior enfocado
5.3. Resultados ambos ejes desenfocados
5.4. Resultados ambos ejes enfocados
5.5. Ángulos de inclinación para sistema de seguimiento solar
64
65
65
67
67
68
69
70
73
76
77
87
I
OBJETIVO GENERAL
Diseñar e implementar el sistema de control para orientar módulos fotovoltaicos,
con la finalidad de aumentar la captación de energía solar e incrementar la
potencia eléctrica generada por el sistema.
OBJETIVOS PARTICULARES
1.
Obtener parámetros físicos y mecánicos del mecanismo de dos grados de
libertad para orientar módulos fotovoltaicos.
2.
Obtener el modelo dinámico
del mecanismo de dos grados de libertad para
orientar módulos fotovoltaicos.
3.
Obtener un esquema de control por medio del método de ubicación de
polos.
4.
Implementación del esquema de control.
II
JUSTIFICACIÓN
En la actualidad debido al déficit de hidrocarburos para atender la demanda global,
los altos precios del petróleo, así como la necesidad de reducir la emisión de
gases contaminantes, es necesario el desarrollo de nuevas tecnologías para el
uso de energías renovables.
Por lo anterior el propósito que se persigue mediante el desarrollo de este trabajo
es el aprovechamiento y uso de la energía solar que será captada por módulos
fotovoltaicos para generar energía eléctrica. Se diseñó e implementó un sistema
de control de un mecanismo de dos grados de libertad para orientar dichos
módulos y con ello mejorar la captación de energía solar, lo cual genera un
aumento en la potencia eléctrica producida por el sistema.
Este sistema se desarrolló para ser implementado en el municipio de Jiutepec en
el estado de Morelos para alimentar los motores que posicionan tres
concentradores solares cilíndricos parábolicos así como para uso domestico.
PLANTEAMIENTO DEL PROBLEMA.
Esta tesis consiste en aprovechar la energía solar que será captada por medio de
módulos fotovoltaicos los cuales tendrán la función de generar energía eléctrica.
Para aumentar la captación de energía solar se desarrolló un sistema de control
de un mecanismo de dos grados de libertad para orientar los módulos
fotovoltaicos, con la ayuda de un sensor solar se realizó el seguimiento de la
trayectoria del sol a lo largo del año y durante el día.
1
CAPITULO I
ESTADO DEL ARTE
1.1 MÓDULOS FOTOVOLTAICOS
1.1.1 Energía solar [1]
La energía solar tiene una gran importancia a nivel mundial, debido a diferentes acontecimientos como el calentamiento global, la contaminación, la escasez de recursos no renovables, la gran demanda energética, o la falta del suministro eléctrico en áreas rurales, a motivado al desarrollo de alternativas energéticas tales como energía eólica, bio-combustibles, energía solar entre otras.
La energía solar es considerada como una fuente de energía renovable. La energía renovable es conocida como un sistema de energía limpia ya que no causa efectos en el ambiente durante y después de su generación. Al igual que el resto de las energías limpias, contribuye a la reducción de emisión de gases de efecto invernadero y especialmente de CO2.
La energía solar es producida en el centro del sol, en un proceso llamado fusión nuclear, la intensidad de calor y presión en el sol causa que los átomos de hidrógeno se separen y se fusionen para formar átomos de helio. Una pequeña cantidad de masa es perdida en este proceso, esta pérdida de materia es emitida al espacio como energía radiante. Por lo menos el 1% de esta energía llega a la tierra. La energía del sol viaja a la velocidad de la luz (300 000 km/s), y llega a la tierra en aproximadamente 8 minutos. La energía solar se manifiesta en un espectro que se compone de radiación ultravioleta, visible e infrarroja. Al llegar a la Tierra, pierde primero su parte ultravioleta, que es absorbida por una capa de ozono que se presenta en el límite superior de la atmósfera. Ya en la atmósfera, la parte infrarroja se pierde ya sea por dispersión al reflejarse en las partículas que en ella se presentan o al llegar a las nubes, que son capaces de reflejar hasta un 80% de la radiación solar que a ellas llega. El resto llega a la superficie, ya sea de manera directa o indirectamente como reflejo de las nubes y partículas en la atmósfera. La radiación solar que llega a la superficie terrestre se puede transformar directamente en electricidad o calor. El calor, a su vez, puede ser utilizado directamente como calor o para producir vapor y generar electricidad. Ahora bien la cantidad de energía recibida en un área específica depende de diferentes factores tales como; la hora del día, las estaciones del año, la nubosidad del cielo, y la proximidad al ecuador.
2
domésticas con la finalidad de absorber, la energía del sol y convertirla en energía eléctrica.
[image:20.612.132.481.248.503.2]El panel solar es básicamente usado en la generación de corriente directa (C.D), el número de celdas o paneles empleados determina la cantidad de electricidad que será generada. Mediante un banco de baterías se almacena la corriente directa la cual se puede convertir en corriente alterna (C.A) mediante el uso de un inversor, este tipo de corriente se utiliza con mayor frecuencia en la industria o en el hogar, en la figura (1) se muestra un conjunto de paneles solares instalados en España y los cuales generan una potencia aproximada de 47.6 MW.
Figura 1.1 Parque solar instalado en España (47.6 MW).
1.1.2 Ventajas del uso de energía solar:
Fuente ilimitada
No causa contaminación en aire y agua.
Tienen una vida larga (los paneles solares duran aproximadamente 30 años). Resiste condiciones climáticas extremas: granizo, viento, temperatura, humedad. Se puede instalar en zonas rurales donde no se tiene suministro eléctrico.
Se puede generar en el lugar de consumo.
3
1.1.3 Desventajas del uso de energía solar:
El costo de generación de energía eléctrica por medio de sistemas fotovoltaicos solares es aún muy alto.
Es necesario el uso de sistemas de almacenaje tales como bancos de baterías. Su eficiencia depende de la disponibilidad de la luz solar recibida.
1.2 ANTECEDENTES HISTORICOS
El efecto fotovoltaico fue descubierto por el físico francés Edmund Becquerel en 1839, al iluminar el electrodo de una célula electrolítica con electrolito poco conductor. En los años 1880, las primeras células fotovoltaicas eran fabricadas con Selenio y solamente conseguían entre el 1-2 % de eficiencia de conversión. En 1861, Mouchout desarrolló una máquina de vapor alimentada por el sol. Esta máquina era de un costo muy elevado, por lo que se descartó su empleo en ese tiempo. En el siglo XIX científicos desarrollaron grandes colectores en forma de cono que hervían el amoníaco para realizar el trabajo de locomoción y refrigeración. Brevemente Francia e Inglaterra tenían la esperanza de que la energía solar abasteciera las operaciones en las soleadas colonias de África y Asia Oriental.
En 1880 Charles Fritts inventó las celdas solares térmicas que posteriormente fueron usadas en los paneles para calentadores y otros dispositivos.
En los Estados Unidos, el sueco John Ericsson apoyó los esfuerzos por aprovechar la energía solar. Se diseño el colector parabólico, tecnología que funciono cien años después con el mismo diseño básico.
Posteriormente William Grylls Adams descubrió que cuando la luz brillaba sobre el selenio, el material se llenaba de electrones, produciendo electricidad.
En 1921 Albert Einstein obtuvo el Premio Nobel de física, por sus aportaciones en el efecto fotoeléctrico, un fenómeno esencial para la generación de electricidad por medio del uso de celdas solares.
En 1953 en Bell Laboratories, los científicos Gerald Pearson Daryl Chapin y Calvin Fuller desarrollaron la primera celda solar de silicio capaz de generar una corriente eléctrica medible con una eficiencia de 4.5%. En 1956 las celdas solares fotovoltaicas, estaban lejos de ser económicamente prácticas, la electricidad procedente de celdas se vendía aproximadamente a 300 dólares el Watt. La era espacial, y la guerra fría durante la década de 1950 y 1960 dio oportunidad para el progreso de la energía solar, puesto que, los satélites y aviones utilizaban paneles solares para la producción de electricidad.
En 1955 se comercializa la primer celda fotovoltaica, con una eficiencia del 2% a un precio de $25 USD cada celda de 14 mW.
4
La Universidad de Delaware construye el “Solar One” en 1λ73, una de las primeras viviendas con energía fotovoltaica. Las placas fotovoltaicas instaladas en el techo tiene un doble efecto: generar energía eléctrica y actuar como colector solar (calentaba el aire bajo ellas, y este aire era llevado a un intercambiador de calor para acumularlo).
En 1973 los precios del petróleo casi se duplicaron, los líderes de países dependientes de petróleo buscaron alternativas energéticas, el gobierno de los EE.UU. realizó una gran inversión en celdas solares que Bell Laboratories había producido en 1953. La esperanza en la década de 1970 fue que a través de la inversión masiva en apoyo a la investigación, la energía solar fotovoltaica podría reducir los costos y eventualmente ser competitiva con los combustibles fósiles. Durante 1990, los costos de la energía solar disminuyeron como se predijo, pero los costos de los combustibles fósiles también disminuyeron, por lo que la energía solar competía con cierta desventaja, en términos de costo.
Se fundan las primeras compañías de energía solar en 1974-1977. En Lewis Research Center de la NASA, la potencia de energía fotovoltaica supera los 500 kW. Posteriormente en 1978 esta compañía instala un sistema FV de 3.5 kWp, en la reserva india Papago (Arizona). Se utilizaba para bombear agua y abastecer 15 casas (iluminación, bombeo de agua, refrigeración). Es utilizado hasta la llegada de las líneas eléctricas en 1983 y a partir de entonces solo se utiliza para bombeo de agua.
En 1983 la producción mundial de energía fotovoltaica supera los 21.3 Mw, y las ventas superan los 250 millones de USD. El vehículo Solar Trek, alimentado por energía fotovoltaica atraviesa Australia 4000 km en alrededor de 27 días. La velocidad máxima es de 72 km/h. La compañía ARCO Solar construye una planta de energía fotovoltaica de 6-MW en California, en una extensión de 120 acres, conectado a la red eléctrica general puede suministrar energía para 2000-2500 casas.
En 1λλ6 en Alemania sobrevoló el avión “Icaro” movido por energía fotovoltaica, las alas y la zona de la cola estaban cubiertas de 3000 celdas de alta eficiencia.
Sin embargo en Japón y Alemania el crecimiento del mercado fotovoltaico ha estado presente desde 1990 hasta la actualidad, en el año 2002 Japón instaló 25 000 paneles solares en tejados. El mercado fotovoltaico está creciendo a un 30% de paneles por año, tratando de disminuir los costos y hacerlo cada vez más rentable.
1.2.1 Aprovechamiento de energía solar en México [10]
5
Esto no significa, que la energía solar directa sea la más económica para el universo de usuarios de energía en el país, ya que su costo actual sólo lo justifica para un número limitado de usuarios, particularmente los que viven alejados de la red eléctrica.
Por otra parte, los pioneros en el desarrollo de tecnología de generación de electricidad, a partir de celdas fotovoltaicas, fueron investigadores del Centro de Investigación y Estudios Avanzados del Instituto Politécnico Nacional (CINVESTAV), quienes desarrollaron una pequeña planta piloto con una capacidad de producción de fotoceldas que permitió, en los años setenta, proveer de electricidad a un número significativo de aulas dentro del sistema nacional de telesecundarias.
Posteriormente con el apoyo del gobierno federal dentro del Programa Solidaridad, y mediante la participación de instituciones como Comisión Federal de Electricidad (CFE), y los Gobiernos estatales y municipales, entre otros, se instalaron en México alrededor de 40,000 sistemas fotovoltaicos, y otros diez mil por la iniciativa privada, para proveer de electricidad a zonas alejadas de la red eléctrica. Esto ha permitido que miles de pequeños poblados cuenten con iluminación eléctrica durante las noches y, en algunos casos, con electricidad para bombeo de agua. Igualmente, el uso de estos sistemas se ha generalizado para la comunicación en sistemas de auxilio e iluminación en carreteras federales, para dar energía a estaciones del sistema de comunicación por microondas y a la telefonía rural. Asimismo, en México se aplican ampliamente los sistemas fotovoltaicos en sistemas de comunicación telefónica rural. La capacidad instalada en sistemas fotovoltaicos en México, según datos de la ANES, fue de 0.9 MW para el año de 1999, con lo que el acumulado, hasta ese mismo año, es de 12.92 MW.
1.3 ENERGIA SOLAR FOTOVOLTAICA
El efecto fotovoltaico se produce al incidir la luz sobre materiales semiconductores extrínsecos generándose un flujo de electrones en el interior de esos materiales y una diferencia de potencial que puede ser aprovechada, análoga a la que se produce entre los bornes de una pila, [8].
En una lámina de material semiconductor puro se introducen elementos químicos llamados dopantes que hacen que ésta tenga un exceso de electrones, no existe un desequilibrio eléctrico, se tendrá el mismo número de electrones que de neutrones en el total de la plancha del semiconductor, convencionalmente se tiene que esta plancha tiene carga negativa y se le denomina N. En otra lámina de material semiconductor se hace el mismo proceso pero en esta ocasión con otra sustancia dopante que provoca que haya una falta de electrones. Por lo que esta plancha tiene carga positiva y se le denomina P. Por último se realiza la unión P-N en la cual el exceso de electrones de N pasa al otro cristal y ocupa los espacios libres en P. La zona inmediata a la unión queda cargada positivamente en N y negativamente en P creándose un campo eléctrico cuya barrera de potencial impide que haya un proceso de retorno de electrones de una plancha a otra.
6
[image:24.612.224.391.396.557.2]Existen celdas monocristalinas y multicristalinas, la diferencia entre ellas radica en la distribución de los cristales de silicio que la componen. Ambas son de alta eficiencia en la conversión fotovoltaica, esta cubiertas por una película anti-reflexión azul oscuro de nitruro de silicio o dióxido de titanio, de color homogéneo, por lo general se confeccionan con avanzada tecnología de impureza adquirida y superficie trasera de aluminio, para un alto rendimiento de conversión energética en la instalación fotovoltaica. De alta calidad en plata y plata-aluminio para garantizar mayor fuerza en las uniones de la soldadura. En la figura 1.2 y figura 1.3 se muestra algunos tipos de celdas solares.
Figura 1.2 Celdas solares monocristalinas [37].
Figura 1.3 Celdas solares multicristalinas [37].
1.4 CLASIFICACIÓN DE PANELES SOLARES EN FUNCIÓN DEL MATERIAL
Silicio puro monocristalino: Están compuestas por secciones de una barra de silicio perfectamente cristalizado en una sola pieza. Son de alta eficiencia, y tienen un costo mayor. En laboratorio se han alcanzado rendimientos máximos del 24.7% y un rendimiento del 16% para los comerciales, (la diferencia del rendimiento obtenido para paneles comerciales y de laboratorio, radica en que en laboratorios se trabaja en condiciones ideales).
7
silicio que se ha estructurado desordenadamente en forma de pequeños cristales. Son de menor eficiencia y menor costo. Se obtiene con ellos un rendimiento inferior que con los monocristalinos. En laboratorio se tiene un rendimiento del 19.8% y en los comerciales de 14 %). Por las características físicas del silicio cristalizado, los paneles fabricados siguiendo esta tecnología tienen mayor grosor que los policristalinos, este tipo de paneles son más finos y versátiles que permiten incluso en algún caso su adaptación a superficies irregulares. Son los denominados paneles de lámina delgada, estos son de diferentes tipos:
Silicio amorfo. (TFS): Basados en silicio, este material no tiene estructura cristalina. Paneles de este tipo son habitualmente empleados para pequeños dispositivos electrónicos (Calculadoras, relojes) y en pequeños paneles portátiles. Su rendimiento máximo alcanzado en laboratorio ha sido del 13% siendo el de los módulos comerciales del 8%.
Teluro de cadmio: Rendimiento en laboratorio de 16% y en módulos comerciales de 8%.
Arseniuro de Galio: Uno de los materiales más eficientes. Presenta un rendimiento en laboratorio del 25.7% y en los comerciales del 20%. Diseleniuro de cobre en indio: Con rendimiento en laboratorio
aproximadamente de 17% y en módulos comerciales del 9%, [9].
Figura 1.4 Módulos solares.
1.5 CLASIFICACIÓN DE PANELES SOLARES EN FUNCIÓN DE SU FORMA
Los paneles solares se pueden clasificar de acuerdo a su forma ya sea para adaptarse a alguna aplicación específica o para lograr un mayor rendimiento.
8
investigaciones en sistemas que concentran la radiación solar por medio de lentes.
Figura 1.5 Paneles solares con superficies reflejantes [38]
Paneles fotovoltaicos forma “teja”: Este tipo de paneles son pequeños los cuales se combinan en gran número para cubrir la superficie de los tejados de las viviendas. Aptos para cubrir grandes demandas energéticas en los que se necesita una mayor superficie de captación.
9
Figura 1.7 Paneles solares con forma de teja
Paneles bi-faciales: Estos están basados en la capacidad de transformar la radiación solar recibida por las dos caras del panel fotovoltaico en electricidad. Para aprovechar esta cualidad se coloca sobre dos superficies blancas que reflejan la luz solar en la parte trasera del panel.
Figura 1.8 Paneles solares bi-faciales [38]
1.6 CLASIFICACION DE PANELES SOLARES POR SU SISTEMA DE SEGUIMIENTO SOLAR
Otra manera de aumentar la eficiencia de un panel fotovoltaico es mediante el desarrollo de sistemas mecatrónicos de seguimiento solar, con la finalidad de obtener una mayor captación de la radiación solar y con ello incrementar la generación de potencia eléctrica.
10
Seguimiento acimutal: Este tipo de seguimiento es de un solo eje y es aquel en el que se sigue la trayectoria del sol desde su posición más oriental hasta su posición más occidental, con un eje de rotación vertical.
Seguimiento polar: Este tipo de seguimiento es de un solo eje y es aquel en el que se sigue la trayectoria del sol desde su posición más oriental hasta su posición más occidental, con un eje de rotación inclinado respecto a la vertical.
Seguimiento de doble eje: Este tipo de seguimiento es de dos ejes y es aquel en el que se sigue la trayectoria del sol desde su posición más oriental hasta su posición más occidental, con un eje de rotación vertical, y el que sigue la trayectoria del sol desde su posición más baja hasta su posición más alta, con un eje de rotación horizontal. Es decir, es el resultado de combinar el seguimiento acimutal con el cenital.
Por ejemplo en [11] se presenta el diseño de un sistema de seguimiento solar el cual consiste de tres posiciones y un eje. Este mecanismo ajusta la posición de cada módulo fotovoltaico, solo en tres ángulos fijos, (mañana, tarde y noche).
Las tres posiciones de paro son ilustradas en la figura 1.9, mañana (A), noche (B) y tarde (C). El módulo en la posición B está orientado al sur, mientras que en la posición A y C están orientados al este y oeste respectivamente, con un ángulo de la posición noche.
Figura 1.9 Concepto de un eje tres posiciones.
11
Figura 1.10 Diagrama esquemático de sistema un eje tres posiciones.
El sensor de posición consiste de dos elementos fotosensibles, divididos por un plato protector de luz. El movimiento del sistema inducirá una sombra en uno de los elementos fotosensibles, un circuito electrónico analógico detecta la señal así como la posición relativa del sol y acciona el motor para mover a la siguiente posición las cuales son: ángulo de paro mañana (este), ángulo de paro noche (sur), ángulo de paro tarde (oeste). La altura del plato protector de luz (shading plate) (H) y la distancia del elemento fotosensible del plato (L), determinan el tiempo de paro y arranque a la siguiente posición.
Figura 1.11 Esquema del sensor de posición solar.
12
sensor primario provee información, de la posición relativa del sol. El sensor de luz fijo determina si un rayo de luz está presente y provee información de la localización absoluta, cuenta con un encoder que envía información de la posición de seguimiento. El sub-circuito de seguimiento controla el movimiento del sistema mecánico y es usualmente controlado por el sensor primario. Y a la salida del circuito tiene un medio puente para controlar los servomotores de CD, en la siguiente figura 1.12 se aprecia el diagrama a bloques del sistema.
Figura 1.12 Diagrama a bloques de sistema de seguimiento
En el artículo [13] se tiene un sistema de seguimiento dual controlado por lógica difusa, el sistema emplea dos motores CD de imán permanente, la operación de este tipo de seguimiento está basado en la rotación del módulo fotovoltaico, tal que se mantenga en la posición perpendicular a la incidencia de los rayos solares. La parte principal del mecanismo consiste de un plato circular donde están montados los módulos fotovoltaicos y los sensores solares, el plato rota alrededor del eje horizontal permitiendo el seguimiento en la dirección Este-Oeste, esta estructura a su vez está montada en un marco, que rota alrededor del eje acimutal, siguiendo la dirección Norte- Sur.
Por otra parte en [14] emplean servomotores los cuales son comandados por medio de un control hibrido, compuesto de control de velocidad y de posición, para obtener un sistema de seguimiento de alta velocidad, Este control fue aplicado a un prototipo con un disco electro-óptico.
13
Figura 1.13 Esquema de seguimiento.
Otra solución es el uso de reflectores o lentes de Fresnel [16] los cuales ayudan a aumentar la concentración de la radiación solar y por consiguiente aumentar la eficiencia de la celda solar, estos lentes sirven como intermediarios entre el sol y la celda, ver figura 1.14, dando una mayor concentración entre 250- 500 veces en un área pequeña de celda.
14
En [17] emplean un motor a pasos controlado por un arreglo lógico programable (PLA) y con una resolución de posición angular de 7.5 º. Cuenta con dos sensores, que indican al control el movimiento a la siguiente posición angular. El la figura 1.15 se muestra un esquema de este sistema.
Figura 1.15 Esquema de sistema de seguimiento solar.
En el artículo [18] el sistema de seguimiento usa un motor a pasos, como se muestra en la figura 1.16. La posición del sol es determinada mediante el uso de un sensor de seguimiento, la lectura obtenida de este es convertida a una señal digital la cual es enviada a un control lógico difuso implementado en un FPGA, finalmente la salida del control es conectada a un driver del motor a pasos, para rotar el módulo en un eje hasta quedar perpendicular a los rayos del sol.
15
CAPITULO II
MODELO DINÁMICO
2.1 MODELO MATEMATICO
El sistema propuesto para orientar y seguir la trayectoria del sol consiste en un mecanismo de dos grados de libertad, el cual tiene instalado módulos fotovoltaicos, que captan la energía solar y la transforman en energía eléctrica con ayuda de un inversor y un banco de baterías.
El mecanismo consiste de dos marcos, el marco superior guía los módulos fotovoltaicos en la dirección este-oeste es decir tiene la función de seguir al sol durante el día, el marco inferior guía los módulos en la dirección norte-sur el cual seguirá al sol durante el año. En la figura 2.1 se muestra el sistema descrito anteriormente.
16
Para lograr el seguimiento que se mencionó previamente es necesario implementar un sistema de control de posición con la finalidad de aumentar la captación de la energía solar y con ello incrementar la generación de potencia eléctrica.
Este capítulo está dedicado a describir el método empleado para obtener el modelo matemático de dicho sistema, el cual se basó en la representación de Denavit-Hartenberg para conocer la cinemática del mecanismo y posteriormente deducir las ecuaciones de movimiento mediante la formulación de Lagrange-Euler.
2.2 CINEMATICA DIRECTA
La cinemática directa consiste en encontrar una matriz de transformación que relaciona el sistema de coordenadas ligado al cuerpo al sistema de coordenadas de referencia. Se utiliza una matriz de rotación 3x3 para describir las operaciones rotacionales del sistema ligado al cuerpo con respecto al sistema de referencia. Se utilizan entonces las coordenadas homogéneas para representar vectores de posición en un espacio tridimensional, y las matrices de rotación se ampliaran a matrices de rotación homogénea 4x4 para incluir las operaciones traslacionales del sistema de coordenadas ligado al cuerpo. Esta representación matricial de un elemento mecánico rígido para describir la geometría espacial fue utilizada por primera vez por Denavit y Hartenberg.
2.2.1 Representación de Denavit- Hartenberg [19]
Para describir la relación traslacional y rotacional entre elementos adyacentes, Denavit y Hartenberg propusieron un método de establecer de forma sistemática un sistema de coordenadas (sistema ligado al cuerpo) para cada elemento de una cadena articulada. La representación de Denavit y Hartenberg consiste de una matriz de transformación homogénea 4x4 ecuación (2.1), representa cada uno de los sistemas de coordenadas de los elementos en la articulación con respecto al sistema de coordenadas del elemento previo, [20].
La representación de Denavit –Hartenberg de un elemento rígido consiste de cuatro parámetros geométricos que están asociados a cada elemento del sistema y describen cualquier articulación ya sea prismática o de revolución. Estos parámetros se describen a continuación:
ai-1 : Es la distancia de Zi a Zi-1 a través del eje xi.
i-1: Es el ángulo que se mide desde Zi a Zi-1 a través del vector xi.
17
Articulación i i-1 ai-1 i di
1 0 a0 1 d1
2 1 a1 2 d2
3 2 a2 3 d3
Tabla 2.1 Parámetros de Denavit-Hartenberg.
Por lo tanto a partir de la descripción anterior de cada parámetro, se obtuvieron los valores reales del sistema de dos grados de libertad. Donde di, ai-1, i-1 permanecen constantes, ya que el sistema tiene dos articulaciones giratorias ique cambia cuando el elemento i gira con respecto al elemento i-1, por lo que 1 y 2 son las variables de articulación. En la figura 2.2 se ilustran estos parámetros.
18
Articulación i i-1 ai-1 i di
1 0 0 1 0
2 -90 a1 2 0
3 0 0 0 0
Tabla 2.2 Parámetros de Denavit-Hartenberg del sistema real.
Una vez establecidos los parámetros para cada elemento, se puede obtener una matriz de transformación homogénea. Sustituyendo los valores anteriores en la ecuación (2.1) se tiene los siguientes resultados:
2.3 DINAMICA
La dinámica trata con las formulaciones matemáticas de las ecuaciones de movimiento del mecanismo de dos grados de libertad, estas ecuaciones son útiles para la simulación en computadora del movimiento, así como para el control del mismo. El problema de control consiste en obtener modelos dinámicos del mecanismo y a continuación especificar leyes o estrategias de control correspondientes para conseguir la respuesta y rendimiento del sistema deseado.
El modelo dinámico del mecanismo se puede obtener a partir de leyes físicas tales como las leyes de la mecánica newtoniana y lagrangiana.
2.3.1 Modelo Dinámico de Lagrange-Euler [19]
19
1. La matriz de transformación de coordenadas homogéneas 4x4 , que describe la relación espacial entre los sistemas de coordenadas del elemento i- ésimo y el elemento (i-1)- ésimo. Relaciona un punto fijado en el elemento i expresado en coordenadas homogéneas con respecto al sistema de coordenadas i-ésimo en el sistema de coordenadas (i-1)-ésimo.
2. La ecuación de Lagrange- Euler
Donde:
L = función lagrangiana = energía cinética K- energía potencial P; K = energía cinética total del mecanismo;
P = energía potencial total del mecanismo; qi = coordenada generalizada mecanismo;
= primera derivada respecto al tiempo de la coordenada generalizada qi;
i = fuerza (o par) generalizado aplicado al sistema en la articulación y para mover el elemento i.
De las ecuaciones de Lagrange- Euler anterior se requiere escoger un conjunto de coordenadas generalizadas para describir el sistema. Las coordenadas generalizadas se utilizan como un conjunto de coordenadas convenientes que describen completamente la localización (posición y orientación) de un sistema con respecto a un sistema de coordenadas de referencia, [20].
2.3.2 Velocidades de las articulaciones
La formulación de Lagrange-Euler requiere conocer la energía cinética del sistema físico, así como la velocidad de cada articulación, [19].
La derivada parcial de con respecto a i se puede calcular fácilmente con la ayuda de una matriz Qi que para una articulación en revolución, se define como:
20
De lo anterior, para i= 1, 2, 3,…,nLa ecuación (2.8) se puede interpretar como el efecto del movimiento de la articulación j
sobre todos los puntos en el elemento i. Con el fin de simplificar las notaciones, definidas
, entonces la ecuación (2.8) se puede escribir como sigue para i= 1, 2, , n,
Utilizando la notación anterior vi se puede expresar como sigue:
Para una articulación giratoria, el efecto de premultiplicar por Qi es equivalente a intercambiar los elementos de las dos primeras filas de , negando todos los elementos de la primera fila y anulando todos los elementos de las filas tercera y cuarta. Los efectos de interacción entre las articulaciones se muestran a continuación:
21
2.3.3 Energía cinética [19]
Sea Ki la energía cinética del elemento i, i = 1, 2, 3,…, n, expresada en el sistema de coordenadas de la base, y sea dKi la energía cinética de una partícula con masa diferencial dm en el elemento i;
Donde se utiliza un operador traza en lugar de un producto escalar de vectores en la ecuación anterior para formar el tensor del cual se puede obtener la matriz de inercia del elemento Ji, (o matriz de pseudoinercia). Sustituyendo la vi de la ecuación (2.10), la energía cinética de la masa diferencial es:
La matriz Uij es la velocidad de cambio de los puntos sobre el elemento i relativo al sistema de coordenadas de la base cuando j cambia. Es constante para todos los puntos en el elemento i. También es independiente de la distribución de masa del elemento i,
así que, sumando todas las energías cinéticas de todos los elementos y poniendo la integral dentro de los corchetes:
22
Donde . Si se emplea el tensor de inercia Iij que se define como
Donde los índices i, j, k indican los ejes principales del sistema de coordenadas i-ésimo y
es la delta de Kronecker, entonces Ji, que es el tensor de inercia se expresa como:
23
Figura 2.3 Movimiento del modulo fotovoltaico en la dirección este-oeste.
24
Por lo anterior el sistema cuenta con dos ejes de giro, que están asignados en la dirección z1 y z2, así como sus respectivos centros de masa c1 y c2.
Figura 2.5 Ejes de giro y centros de masa del sistema.
Cada marco está fabricado por cuatro tubos cuadrados de PTR calibre #14 Azul de 4 x 1 ½ ”, densidad = 7872 kg/m3. El marco inferior está compuesto de dos tubos de PTR con las mismas dimensiones (PTR 1 y PTR 2), longitud= 3.37 m, altura= 0.1016 m, ancho= 0.0381 m. Así como por dos tubos de PTR (PTR 3 y PTR 4) de longitud= 3.7238 m, altura= 0.1016 m, ancho= 0.0381.
Aplicando las ecuaciones del Apéndice A para obtener el momento de inercia de un prisma rectangular solido con respecto al centro de masas se tienen los siguientes resultados:
MARCO INFERIOR
PTR 1 y 2
PTR 3 y 4
I
x13.6317 kg m
218.3909 kg m
2I
Y0.02211 kg m
218.4068 kg m
2I
Z13.6462 kg m
20.0244 kg m
2A
0.1348 m
20.0152 m
2V
1.83 x 10
-3m
32.06 x 10
-3M
14.399 kg
16.294
25
Sumando los valores de Ix para el PTR 1 y 2 así como los valores para el PTR 3,4 se obtiene un valor Ix(marco_inf)= 64.0457 kg m2, del mismo modo para IY,IZ, M se obtiene los siguientes resultados Iy(marco_inf)= 36.8579 kg m2, Iz(marco_inf)= 27.3415 kg m2, M(marco_inf)= 60.6225 kg.
Utilizando la representación matricial de la ecuación (2.15) se obtiene el tensor de inercia siguiente:
Figura 2.6 Asignación de referencias para marco inferior.
Ahora bien el marco superior está formado por dos tubos de PTR de las mismas dimensiones (PTR 5 y PTR 6), longitud= 3.18 m, altura= 0.1016 m, ancho= 0.0381 m. y por dos tubos de PTR (PTR 7 y PTR 8) con una longitud= 3.5438 m, altura= 0.1016 m, ancho= 0.0381m. Este marco incluye 10 módulos fotovoltaicos, cuyas dimensiones son 1481mm x 671mm x 50 mm y masa= 14 kg, las cuales se muestran en la figura 2.7.
MARCO SUPERIOR
PTR 5 y 6 PTR 7 y 8 MODULO Ix 11.3902 kg m2 15.8513 kg m2 3.0842 kg m2
IY 11.4037 kg m2 0.02321 kg m2 2.5618 kg m2
IZ 0.0208 kg m2 15.8663 kg m2 0.5281 kg m2
A 0.0127 m2 0.0142 m2 0.9937 m2
V 1.72 x 10-3 m3 1.92 x 10-3 0.04968 m2
M 13.512 kg 15.1424 kg 14 kg
26
Sumando los valores de Ix para el PTR 1 y 2, para el PTR 3,4 y de los 10 módulos fotovoltaicos se obtiene un valor Ix(marco_sup)= 85.4528 kg m2, del mismo modo para IY,IZ,
M se obtiene los siguientes resultados Iy(marco_sup)= 48.6004 kg m2, Iz(marco_inf)= 37.0564 kg m2, M
(marco_inf)= 197.4605 kg.
Utilizando la representación matricial de la ecuación (2.15) se obtiene el tensor de inercia siguiente:
Figura 2.7 Asignación de referencias para marco superior
Finalmente la energía cinética total K del mecanismo se puede expresar como:
2.3.4 Energía potencial
Se tiene que la energía potencial total está dada por P y la energía potencial de cada
27
Y la energía potencial total se obtiene sumando todas las energías potenciales de cada elemento.
Donde g = (gx, gy, gz, 0) es el vector fila de gravedad expresado en el sistema de coordenadas de la base.
La función lagrangiana L=K-P se obtiene a partir de las ecuaciones 2.18 y 2.20.
Aplicando la formulación de Lagrange- Euler a la función lagrangiana de la ecuación 2.21 da el par generalizado necesario i para que el actuador de la articulación i mueva el elemento i-esimo del marco,
Para i=1,2,…,n. La ecuación anterior se puede expresar en notación matricial.
O en forma matricial
Donde:
(t)=nx1vector generalizado aplicado en las articulaciones i=1,2,…, n esto es
vector nx1 de las variables de articulación del marco se expresa como.
28
vector nx1 de la aceleración de las variables de articulación
D( )= matriz simétrica inercial relacionada con la aceleración nxn cuyos elementos son
vector de fuerza de Coriolis y centrifuga no lineal nx1
La matriz Uijk se interpreta como los efectos de interacción del movimiento de la articulación j y k sobre todos los puntos en el elemento i.
29
Por otra parte el vector C( )=vector de fuerza de la carga gravitatoria nx1 está dado por:2
Donde:
2.3.5 Ecuaciones de movimiento del marco con articulaciones giratorias
La matriz simétrica que está relacionada con la aceleración D( ), de la ecuación 2.25 se muestra a continuación:
30
Los términos relacionados con la velocidad de Coriolis y velocidad centrífuga
enunciados en las ecuaciones (2.26) y (2.27), se pueden expresar mediante un vector columna de dos dimensiones:
Utilizando la ecuación 2.26 se deduce los términos de Coriolis y centrífugo. Donde el subíndice i expresa la articulación en el cual se manifiestan los pares inducidos por la velocidad. Para la articulación 1, i=1 se tiene lo siguiente:
Para la articulación 2, i=2 se tiene lo siguiente:
31
Sustituyendo los valores anteriores en las ecuaciones 2.26 y 2.27 se obtuvo que :
Finalmente se sustituyen los valores anteriores en el vector de la ecuación (2.32). Por último se obtiene los términos relacionados con la gravedad c=(c1 c2)T.
Donde:
]
De lo anterior se obtiene los términos de la matriz de gravedad.
Las ecuaciones de movimiento de Lagrange- Euler para el mecanismo de dos grados de libertad son las siguientes:
32
Donde:33
Figura 2.8 Modelo del sistema en Sim-Mechanics
En la figura 2.9 se observa el modelo del sistema, el cual cuenta con dos articulaciones de revolución, en las cuales están conectados un sensor de posición y un actuador que envía la respuesta de la velocidad del sistema.
34
Ahora bien en las siguientes imágenes se observa la respuesta del sistema ante el efecto de la gravedad, donde cada marco tenderá a caer y a oscilar alrededor de su eje de giro.
Figura 2.10 Esquema del sistema en movimiento.
En la siguiente figura se observa como el mecanismo tenía que ser detenido antes de que se implementara los mecanismos de cuatro barras, ya que comenzaba a girar cada marco en sus respectivos ejes.
35
Ahora bien como se aprecia en la figura 2.12 se tiene la respuesta del sistema inicializado en un ángulo 1=0, ,=0 y 1=0 N-m para el marco inferior que gira al sistema en la dirección Norte-Sur a lo largo del año. La línea magenta indica la posición en un tiempo de 20 segundos, donde el ángulo 1, está dado en grados. La línea amarilla indica la velocidad a lo largo del tiempo es decir la velocidad , dada en grados/s.
Figura 2.12.Comportamiento dinámico del marco inferior.
Por otra parte en la siguiente figura se tiene la respuesta del sistema inicializado en un ángulo 2=0, ,=0 y 2=0 para el marco superior el cual contiene los módulos fotovoltaicos y gira en la dirección Este-Oeste a lo largo del día. La línea amarilla indica la velocidad en un intervalo de 20 s donde , está dada en grados/s. Mientras que la línea magenta indica la posición del marco superior, en grados.
36
.CAPITULO III
DISEÑO DEL SISTEMA DE CONTROL
3.1 REPRESENTACIÓN EN EL ESPACIO DE ESTADOS [23]
El estado de un sistema dinámico es el conjunto más pequeño de variables (denominas variables de estado) tal que el conocimiento de esas variables en t=t0, conjuntamente con el conocimiento de la entrada para t t0, determinan completamente el comportamiento del sistema en cualquier tiempo t t0.
Las variables de estado de un sistema dinámico son las variables que constituyen el conjunto más pequeño de variables que determinan el estado del mencionado sistema dinámico.
Se requiere al menos n variables x1, x2, … xn para describir completamente el comportamiento dinámico del sistema de orden n. Estas son las n variables de estado.
La representación del modelo dinámico de sistemas en el espacio de estados se usan tres tipos de variables.
Variables de entrada Variables de salida Variables de estado
La ventaja del uso en representación en espacio de estado es que éste puede en su modelado representar sistemas tanto continuos como discretos, lineales o no lineales variables o invariantes en el tiempo y generalmente usados en notación matricial, [24].
Ahora bien de las ecuaciones 2.39 y 2.40 se obtiene lo siguiente:
37
Las variables de estado son las siguientes:La representación en el espacio de estados es la siguiente
Este sistema representado en el espacio de estados es no lineal, para linealizarlo se emplea la siguiente técnica.
3.2. LINEALIZACIÓN [23]
La gran mayoría de los sistemas físicos son no lineales. Una clase importante de ellos se puede describir por las ecuaciones de estado
Donde f y h son campos vectoriales no lineales.
Una ecuación de estado lineal es una herramienta útil para describir sistemas como (3.4) en forma aproximada. El proceso de obtención de un modelo lineal a partir de uno no
lineal se llama linealización.
La linealización se realiza alrededor de un punto o trayectoria de operación, [25], definida
por valores nominales , , y , que satisfacen la ecuación (3.4)
38
Es de interés el comportamiento de la ecuación no lineal (3.4) para una entrada y estado inicial “cercanos” a los valores nominales, es decir y para y suficientemente pequeños para t t0.
Suponemos que la correspondiente solución permanece cercana a la nominal, y escribimos x(t) = , + xd (t) para cada t t0. En términos de la ecuación de estado no lineal (3.29) se tiene lo siguiente.
Asumiendo diferenciabilidad, podemos expandir el lado derecho de esta ecuación usando series de Taylor alrededor de y , reteniendo sólo los términos de primer orden.
Notar que la expansión es en términos de x y u; no se hace con respecto a la tercer
variable t.
Repitiendo la operación para cada i = 1, . . . ,n, y volviendo a la notación vectorial, se
obtiene:
Donde la notación representa el Jacobiano, o Matriz Jacobiana, del campo vectorial f
con respecto a x,
3.3 DISEÑO POR UBICACIÓN DE POLOS [23]
39
retroalimentación de estado, a través de una matriz de ganancia de retroalimentación del estado adecuada.
Considerando que el sistema de control de lazo abierto (el estado x no se realimenta a la señal de control u) se encuentra descrito por la ecuación:
Donde:
x = vector de estado (de dimensión n) u = señal de control (escalar)
A = matriz constante n x n B = vector constante n x 1
Figura 3.1: Sistema de control de lazo abierto.
El control mediante la realimentación del estado es:
Donde:
K es la matriz de realimentación de estado de 1 x n con elementos de ganancia
constante.
Sustituyendo la ecuación (3.8) en la (3.9), se tiene:
40
ganancia 1 x n de retroalimentación del estado y el sistema se convierte en un sistema de
control de lazo cerrado, ver figura 3.2.
Figura 3.2: Sistema de control de lazo cerrado con u = -K x.
Este es un sistema de lazo cerrado porque el estado x está realimentando a la señal de control u.
3.3.1 Condición necesaria y suficiente para la ubicación arbitraria de polos [23]
La ubicación arbitraria de los polos para un determinado sistema, es posible si y sólo si, el sistema tiene estado completo controlable, es decir, la matriz M tiene inversa. Los valores propios de la matriz A – BK (que se designan 1, 2, … n) son los polos de lazo cerrado deseados.
Si un sistema es por completo controlable, siempre se puede representar la ecuación de estado (3.8) en forma canónica controlable
Se define la matriz de transformación T como:
41
donde las ai son los coeficientes característicosSe define como un nuevo vector de estado
Si el rango de M es n (lo que significa que el sistema tiene estado completo controlable) la
matriz T tiene inversa. Utilizando la matriz T se puede transformar (3.8) a la forma canónica controlable:
Donde
Para encontrar la ecuación característica de realimentación de estado del sistema
Se desarrolla:
Donde KT = es la matriz de coeficientes:
42
Ecuación característica de realimentación de estadoIgualando los coeficientes del polinomio característico obtenido de los valores propios de la matriz (A – BK), que se habían designado como 1, 2, … n, que son los polos de lazo cerrado deseados, con los coeficientes de potencias iguales de de (3.21) se tiene:
Con el resultado anterior se obtienen los valores de la matriz K que se expresan como:
Así se ha comprobado que para que los polos se puedan ubicar en forma arbitraria, es condición necesaria y suficiente que el sistema tenga estado completo controlable.
3.3.2 Pasos para el diseño de la ubicación de los polos
Considerando el sistema descrito por (3.8) con la señal de control dada por (3.9).
43
Paso 1.Hay que verificar la condición de controlabilidad del sistema.
Paso 2.
A partir del polinomio característico de la matriz A,
Se debe determinar los valores de a0, a1, a2, … , an-1.
Paso 3.
Ahora bien se debe determinar la matriz de transformación T que transforma la ecuación de estado del sistema a la forma canónica controlable (si la ecuación del sistema ya está en dicha forma, entonces T = I).
Paso 4.
Utilizando los valores propios deseados (los polos de lazo cerrado buscados), hay que hallar el polinomio característico deseado:
Y determinar los valores de α0, α1, α2, …, αn-1
Paso 5.
Determinar la matriz K de ganancia de realimentación de estado, descrita como:
3.3.3 Asignación de polos robusta [26]
Ahora bien, considerando el sistema lineal multivariable invariante en el tiempo definido por la ecuación de estado 3.8. Donde la matriz B es asumida como de rango completo. El comportamiento del sistema de la ecuación 3.8 es gobernado por los polos del sistema, que son los valores propios de la matriz A, como se describió anteriormente. Para hacer que un sistema sea estable a menudo es deseable modificar los polos de éste, lo que puede ser logrado usando una retroalimentación de estado expresada en la ecuación 3.9.

![Figura 1.2 Celdas solares monocristalinas [37].](https://thumb-us.123doks.com/thumbv2/123dok_es/5004948.77242/24.612.224.391.396.557/figura-celdas-solares-monocristalinas.webp)