06) Movimiento Circular
0601) Movimiento Circular
Uniforme
Desarrollado por el Profesor Rodrigo
Vergara Rojas
A) Generalidades
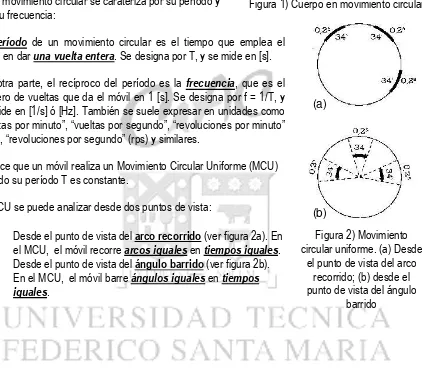
Un cuerpo efectúa un movimiento circular cuando se mueve sobre una circunferencia, como se ilustra en la figura 1.
Todo movimiento circular se carateriza por su período y por su frecuencia:
El período de un movimiento circular es el tiempo que emplea el móvil en dar una vuelta entera. Se designa por T, y se mide en [s].
Por otra parte, el recíproco del período es la frecuencia, que es el número de vueltas que da el móvil en 1 [s]. Se designa por f = 1/T, y se mide en [1/s] ó [Hz]. También se suele expresar en unidades como “vueltas por minuto”, “vueltas por segundo”, “revoluciones por minuto” (rpm), “revoluciones por segundo” (rps) y similares.
Se dice que un móvil realiza un Movimiento Circular Uniforme (MCU) cuando su período T es constante.
El MCU se puede analizar desde dos puntos de vista:
• Desde el punto de vista del arco recorrido (ver figura 2a). En el MCU, el móvil recorre arcos iguales en tiempos iguales. • Desde el punto de vista del ángulo barrido (ver figura 2b).
En el MCU, el móvil barre ángulos iguales en tiempos iguales.
(a)
(b)
Figura 2) Movimiento circular uniforme. (a) Desde
el punto de vista del arco recorrido; (b) desde el punto de vista del ángulo
barrido
[image:2.612.108.530.178.551.2]B) Velocidades en el MCU
Considérese el experimento ilustrado en la figura 3. Una persona toma un hilo de 1 [m] de largo, y ata a él una piedra en el extremo (A) y otra a 80 [cm] (B), Posteriormente, las hace girar a razón de 3 vueltas por segundo, y le pregunta a dos observadores externos, a los que denominaremos 1 y 2, cuál de las dos piedras tiene mayor velocidad.
• Desde el punto de vista del
observador 1, la piedra A tiene mayor velocidad, pues recorre una circunferencia mayor que la de B en el mismo tiempo. • Desde el punto de vista del observador 2,
por más vueltas que den, ninguna piedra le saca ventaja a la otra, pues siempre van juntas. Por lo tanto, tienen la misma velocidad.
Estas conclusiones, aunque aparentemente
contradictorias, son simultáneamente ciertas, pues los observadores estaban analizando el MCU desde diferentes puntos de vista.
El observador 1 está analizando la situación desde el punto de vista del arco recorrido (ver figura 4a), y la velocidad de la cual hablaba es la velocidad lineal o tangencial v, que se define como el cuociente entre el arco recorrido y el tiempo empleado (v=∆s ∆t). Se mide en [m/s], [Km/h], [m/min] y otras unidades similares
El observador 2 está analizando la situación desde el punto de vista del ángulo barrido (ver figura 4b), y la velocidad de la cual hablaba es la velocidad angular ωωωω, que se define como el cuociente entre el ángulo barridoy el tiempo empleado (
ω
=∆θ
∆t). Se mide en [rad/s], [rad/min], [grados/s], [grados/min] y otras unidades similaresPor consideraciones de geometría
θ
R S= ⋅∆
∆ [1]
Donde R es el radio del círculo.
dividiendo por ∆t
A
B
1
2
Figura 3) Ilustración del experimento de las piedras
θ
∆ s
∆
(a) (b)
[image:3.612.92.533.112.561.2]ω
R v t
θ
R t s
⋅ =
⇒
∆ ∆ = ∆ ∆
[2]
Donde v =∆s ∆t es la rapidez media de cambio de arco recorrido y
ω
=∆θ
∆t es la rapidez media de cambio del ángulo barrido. Haciendo ∆t → 0, v→v yω
→ω
, se llega a:ω
⋅ =R
v [3]
Para un cuerpo en MCU, la velocidad tangencial se puede definir como:
T R 2
v= ⋅
π
⋅ [4]Donde T es el período. Similarmente, se puede definir la velocidad angular como:
T 2
π
ω
= ⋅ [5]Reemplazando [4] en [5]
R R
T 2 T
R 2
v = ⋅
π
⋅ = ⋅π
⋅ =ω
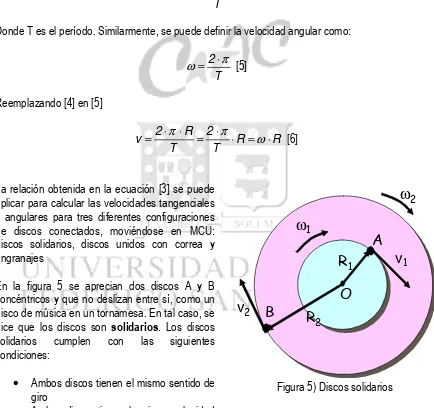
⋅ [6]La relación obtenida en la ecuación [3] se puede aplicar para calcular las velocidades tangenciales y angulares para tres diferentes configuraciones de discos conectados, moviéndose en MCU: discos solidarios, discos unidos con correa y engranajes
En la figura 5 se aprecian dos discos A y B concéntricos y que no deslizan entre sí, como un disco de música en un tornamesa. En tal caso, se dice que los discos son solidarios. Los discos solidarios cumplen con las siguientes condiciones:
• Ambos discos tienen el mismo sentido de giro
• Ambos discos tienen la misma velocidad angular, es decir ω1= ω2 = ω
• Existe proporcionalidad directa entre las velocidades tangenciales de los discos con respecto a sus radios. Así, a mayor radio de giro, mayor velocidad tangencial.
R
1R
2O
B
A
v
1v
2ω
1ω
2 [image:4.612.90.524.228.636.2]2 1
2 1
2 2
1 1
R R v v R
v
R v
=
⇒
⋅ =
⋅ =
ω
ω
[7]
En la figura 6 se aprecian dos discos A y B unidos por una correa o banda que no desliza con ellos. Los discos unidos por correa cumplen con las siguientes condiciones:
• Ambos discos tienen el mismo sentido de giro
• Ambos discos tienen la misma velocidad tangencial, es decir v1= v2 =
v
• Existe proporcionalidad inversa entre las velocidades angulares de los discos con respecto a sus radios. Así, a mayor radio de giro, menor velocidad angular.
1 2
2 1
2 2
1 1
R R R
v
R v
=
⇒
⋅ =
⋅ =
ω
ω
ω
ω
[8]
En la figura 7 se aprecian dos discos A y B que se mantienen en contacto en un punto, en el que no deslizan entre sí. En este caso, se dice que los discos actúan como engranajes. Los engranajes cumplen con las siguientes condiciones:
• Ambos discos tienen sentidos de giro opuestos.
• Ambos discos tienen la misma velocidad tangencial, es decir v1= v2 = v
• Existe proporcionalidad inversa entre las velocidades angulares de los discos con respecto a sus radios. Así, a mayor radio de giro, menor velocidad angular.
1 2
2 1
2 2
1 1
R R R
v
R v
=
⇒
⋅ =
⋅ =
ω
ω
ω
ω
[9] R2
B
A ω2
v1 v2
R1
O O
ω1
Figura 6) Discos unidos con correa
R2
B A
ω2
v1 v2
R1 O R1 O O
ω1
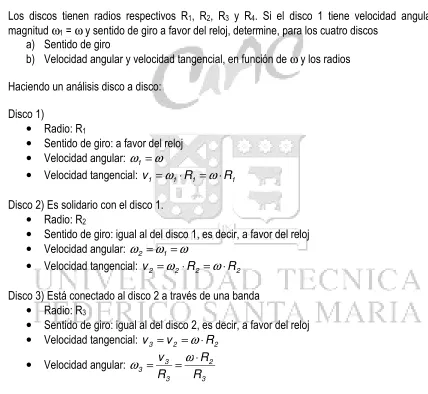
[image:5.612.98.516.70.621.2]Ejemplo: En la figura 8 se aprecian cuatro discos conectados de la siguiente manera:
• El disco 1 y el disco 2 son solidarios.
• El disco 2 y el disco 3 están unidos a través de una banda.
• El disco 3 y el disco 4 son engranajes
Los discos tienen radios respectivos R1, R2, R3 y R4. Si el disco 1 tiene velocidad angular de
magnitud ω1 = ω y sentido de giro a favor del reloj, determine, para los cuatro discos
a) Sentido de giro
b) Velocidad angular y velocidad tangencial, en función de ω y los radios
Haciendo un análisis disco a disco:
Disco 1)
• Radio: R1
• Sentido de giro: a favor del reloj • Velocidad angular:
ω
1 =ω
• Velocidad tangencial: v1 =
ω
1⋅R1 =ω
⋅R1Disco 2) Es solidario con el disco 1. • Radio: R2
• Sentido de giro: igual al del disco 1, es decir, a favor del reloj • Velocidad angular:
ω
2 =ω
1 =ω
• Velocidad tangencial: v2 =
ω
2⋅R2 =ω
⋅R2Disco 3) Está conectado al disco 2 a través de una banda • Radio: R3
• Sentido de giro: igual al del disco 2, es decir, a favor del reloj • Velocidad tangencial: v3 =v2 =
ω
⋅R2• Velocidad angular:
3 2
3 3 3
R R R
v ⋅
=
=
ω
ω
Disco 4) Está unido tangencialmente al disco 3 (engranajes). • Radio: R4
• Sentido de giro: opuesto al del disco 3, es decir, en contra del reloj • Velocidad tangencial: v4 =v3 =
ω
⋅R2• Velocidad angular:
4 2
4 4 4
R R R
v ⋅
=
=
ω
ω
R1 R2
R3
R4
1
ω
2
ω
3
ω
4
ω
1
v
2
v
3
v
4
v
1
2 3
4
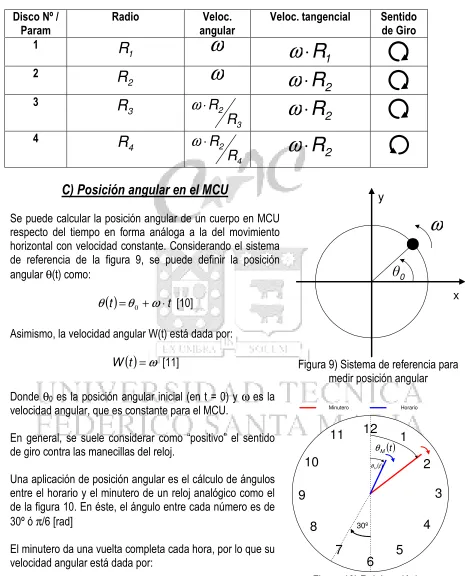
[image:6.612.77.505.216.610.2]En la siguiente tabla se resumen los resultados obenidos
Disco Nº / Param
Radio Veloc.
angular
Veloc. tangencial Sentido de Giro 1
1
R
ω
1
R
⋅
ω
2
2
R
ω
2
R
⋅
ω
3
3
R
3 2
R
R
⋅
ω
2
R
⋅
ω
4
4
R
4 2
R
R
⋅
ω
2
R
⋅
ω
C) Posición angular en el MCU
Se puede calcular la posición angular de un cuerpo en MCU respecto del tiempo en forma análoga a la del movimiento horizontal con velocidad constante. Considerando el sistema de referencia de la figura 9, se puede definir la posición angular θ(t) como:
( )
t =θ
+ω
⋅tθ
0 [10]Asimismo, la velocidad angular W(t) está dada por:
( )
t =ω
W [11]Donde θ0 es la posición angular inicial (en t = 0) y ω es la
velocidad angular, que es constante para el MCU.
En general, se suele considerar como “positivo” el sentido de giro contra las manecillas del reloj.
Una aplicación de posición angular es el cálculo de ángulos entre el horario y el minutero de un reloj analógico como el de la figura 10. En éste, el ángulo entre cada número es de 30º ó π/6 [rad]
El minutero da una vuelta completa cada hora, por lo que su velocidad angular está dada por:
[
]
[ ]
=
= =
min rad 30 h
rad 2 h 1
rad 2
ω
M
π
π
π
[12]
x y
ω
0
θ
Figura 9) Sistema de referencia para medir posición angular
12
3
9
6
1
2
4
5
7
8
10
11
30º
( )t
H
θ
( )t
M θ
Minutero Horario
[image:7.612.75.540.103.679.2]El horario da una vuelta completa cada 12 horas hora, por lo que su velocidad angular está dada por:
[
]
[ ]
=
= =
min rad 360 h
rad 6 h 12
rad 2
ω
H
π
π
π
[13]
Tomando como referencia la posición de las 12:00 hrs, y asumiendo como positivo el sentido de giro a favor de las manecillas del reloj, se puede expresar la posición de cada manecilla a través de las siguientes ecuaciones: Para el horario
( )
t tθ
H
H =
ω
⋅ [14]Para el minutero:
( )
t tθ
M
M =
ω
⋅ [15]D) Aceleración centrípeta
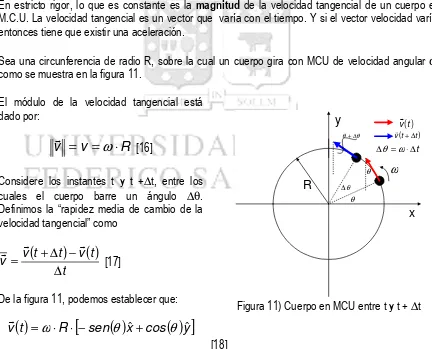
En estricto rigor, lo que es constante es la magnitud de la velocidad tangencial de un cuerpo en M.C.U. La velocidad tangencial es un vector que varía con el tiempo. Y si el vector velocidad varía, entonces tiene que existir una aceleración.
Sea una circunferencia de radio R, sobre la cual un cuerpo gira con MCU de velocidad angular ω, como se muestra en la figura 11.
El módulo de la velocidad tangencial está dado por:
R
v
v
=
=
ω
⋅
[16]
Considere los instantes t y t +∆t, entre los cuales el cuerpo barre un ángulo ∆θ. Definimos la “rapidez media de cambio de la velocidad tangencial” como
(
)
( )
t
t
v
t
t
v
v
∆
−
∆
+
=
[17]
De la figura 11, podemos establecer que:
( )
t
R
[
sen
( )
x
cos
( )
y
]
v
=
ω
⋅
⋅
−
θ
ˆ
+
θ
ˆ
[18]
y
x R
θ θ ∆
ω
( )t v
(t t)
v +∆
θ θ θ+∆
t ∆ ⋅ = ∆θ ω
[image:8.612.87.519.350.699.2]( )
[
(
)
(
)
]
(
)
(
)
[
sen x cos y]
R y cos x sen R t v ˆ ˆ ˆ ˆ t t + + ∆
∆ + − ⋅ ⋅ = ∆ + + ∆ + − ⋅ ⋅ = ω θ ω θ ω θ θ θ θ ω [19]
Usando las identidades trigonométricas
(
a b)
sen( )
acos( )
b cos( )
asen( )
bsen + = + [20a]
(
a b)
cos( )
a cos( )
b sen( )
asen( )
bcos + = − [20b]
Se puede expresar [19] como:
( )
(
( )
(
)
( )
(
)
)
( )
(
)
( )
(
)
(
)
ˆ
]
ˆ
[
y
sen
sen
cos
cos
x
sen
cos
cos
sen
R
t
v
t
t
t
t
∆
−
∆
+
∆
+
∆
−
⋅
⋅
=
ω
θ
ω
θ
ω
θ
ω
θ
ω
[21]Reemplazando [18] y [21] en [17], se llega a
( )
(
)
( )
(
)
( )
(
)
( )
(
)
( )
(
)
( )
(
)
ˆ] ˆ [ y cos sen sen cos cos x sen sen cos cos sen t R v θ ω θ ω θ θ ω θ ω θ ω − ∆ − ∆ + − ∆ + ∆ − ∆ ⋅ = t t t t [22]En la figura 12 se observa que, a medida que ∆t → 0, el vector “rapidez media de cambio de velocidad tangencial “dado por [22] tiende a
tomar la dirección del radio R y el sentido hacia el centro de giro.
La aceleración centrípeta es el límite de la expresión [17] cuando ∆t → 0.
(
)
( )
t t v t t v lim v lim a 0 t 0 t C ∆ − ∆ + = = → ∆ → ∆ [23]Así, ∆t → 0 ⇒ ∆θ → 0: En este caso, se pueden hacer las aproximaciones
(
ω
∆
t
)
≈
ω
∆
t
sen
y cos(
ω∆t)
≈1.Reemplazando [22] en [23] y aplicando estas aproximaciones: y x R θ ω ( )t v
( )t aC
Figura 13) Vectores velocidad tangencial y aceleración centrípeta en diferentes puntos de la trayectoria circunferencial.
Figura 12) vector rapidez media de cambio de velocidad
[image:9.612.83.523.164.645.2]( )
( )
( )
(
)
( )
( )
( )
(
)
( )
( )
( )
ˆ( )
ˆ] [ ] ˆ ˆ [ ] ˆ ˆ [ y sen -x cos R y sen -x cos t R lim y cos sen cos x sen cos sen t R lim a 2 0 t 0 t Cθ
θ
ω
θ
ω
θ
ω
ω
θ
θ
ω
θ
θ
θ
ω
θ
ω
− ⋅ ⋅ = ∆ ∆ − ∆ ⋅ = − ∆ − + − ∆ + − ∆ ⋅ = → ∆ → ∆ t t t t [24]En [24] se verifica claramente que
R
a
C=
ω
2⋅
[25]
Se define la aceleración centrípeta como aquella aceleración instantánea que sufre un cuerpo en M.C.U. Es un vector de dirección radial y dirigido hacia el centro de giro.
En la figura 13 se muestran los vectores velocidad tangencial y aceleración centrípeta para diversos punto de la trayectoria circular. Se aprecia claramente la perpendicularidad entre ambos vectores.
Otra manera de hacer esta demostración se ilustra en la figura 14. En ella, se muestra una partícula con MCU moviéndose entre los puntos A y B en un tiempo ∆t. En la figura, v1
es la velocidad tangencial en A, y v2
es la velocidad tangencial en B. El cambio vectorial de la velocidad
1 2 v v v − =
∆ se muestra en el triángulo O’A’B’. En virtud del “teorema de la horquilla” (ver anexo al final de este documento), los ángulos rotulados ∆φ en los triángulos OAB y O’A’B’ son iguales, por lo que ambos triángulos son semejantes. Así:
1 v R v s A' O' OA B' A' AB = ∆ ∆ ⇒
= [26]
Considerando ∆v =∆v
. Para el cuerpo en MCU, v1 = v2 =v
. Así: s R v v v R v s ∆ = ∆ ⇒ = ∆ ∆ [27]
Aplicando la definición de aceleración media:
φ ∆ O R R A B 1
v
2 v φ ∆v
∆
O' A' B's
∆
[image:10.612.87.515.216.458.2]t s R
v t v a
∆ ∆ = ∆ ∆
= [28]
Finalmente, haciendo el límite cuando ∆t → 0 para calcular la aceleración instantánea:
R v t s lim R v t s R v lim a lim a
2
0 t 0
t 0
t ∆ =
∆ =
∆ ∆ =
=
→ ∆ →
∆ →
∆ [29]
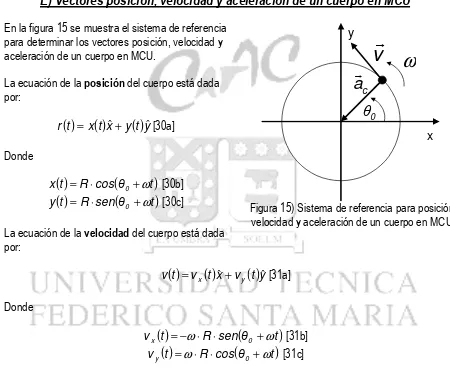
E) Vectores posición, velocidad y aceleración de un cuerpo en MCU
En la figura 15 se muestra el sistema de referencia para determinar los vectores posición, velocidad y aceleración de un cuerpo en MCU.
La ecuación de la posición del cuerpo está dada por:
( )
t x( )
t x y( )
t y r = ˆ+ ˆ[30a]Donde
( )
t R cos(
θ t)
x = ⋅ 0 +ω
[30b]( )
t R sen(
θ t)
y = ⋅ 0 +ω
[30c]La ecuación de la velocidad del cuerpo está dada por:
( )
t v( )
t x v( )
t y v = x ˆ+ y ˆ[31a]Donde
( )
t R sen(
θ t)
vx =−ω
⋅ ⋅ 0 +ω
[31b]( )
t R cos(
θ t)
vy =ω
⋅ ⋅ 0 +ω
[31c]La ecuación de la aceleración del cuerpo está dada por:
( )
t a( )
t x a( )
t y a = x ˆ+ y ˆ [32a]Donde
( )
t R cos(
θ t)
ax =−
ω
2 ⋅ ⋅ 0 +ω
[32b]( )
t R sen(
θ t)
ay =−
ω
2 ⋅ ⋅ 0 +ω
[32c]x y
ω
0
θ
v
c
a
[image:11.612.81.531.213.585.2]Anexo: Teorema de la Horquilla
El teorema dice que “los ángulos formados por rectas respectivamente perpendiculares entre sí, son iguales.”
Imagine un alambre doblado en forma de “horquilla”: las dos “ramas” forman un ángulo ϕ, como se muestra en la figura 16a. Si a continuación cada una de las ramas es doblada en 90º (ver figura 16b), ¿cuál es el ángulo que forman los
extremos doblados?
A primera vista, los dos extremos doblados no forman ángulos. Sin embargo, los ángulos se forman entre las prolongaciones de estos trazos. En la figura 16c, vemos que la horquilla, los extremos doblados y las prolongaciones forman una figura de 4 lados, cuya suma de ángulos es 360º. Como dos de los lados tienen 90º y el otro tiene un ángulo ϕ, el cuarto tiene (90 - ϕ)º. Finalmente, por geometría básica se puede demostrar que ϕ1 = ϕ2 = ϕ
ϕ
-90
(a)
(b)
(c)
Figura 16) Teorema de la horquilla (a) horquilla;(b) horquilla con las puntas doblada
[image:12.612.89.503.110.544.2]