Clusterización en redes Ad Hoc de gran escala Edición Única
75
0
0
Texto completo
(2) c Eulogio Fabián Ocura Camacho, 2005.
(3) Clusterización en redes Ad Hoc de gran escala por. Ing. Eulogio Fabián Ocura Camacho. Tesis Presentada al Programa de Graduados de la División de Tecnologı́as de Información y Electrónica como requisito parcial para obtener el grado académico de. Maestro en Ciencias especialidad en. Telecomunicaciones. Instituto Tecnológico y de Estudios Superiores de Monterrey Campus Monterrey Diciembre de 2005.
(4) Instituto Tecnológico y de Estudios Superiores de Monterrey Campus Monterrey División de Tecnologı́as de Información y Electrónica Programa de Graduados. Los miembros del comité de tesis recomendamos que la presente tesis de Eulogio Fabián Ocura Camacho sea aceptada como requisito parcial para obtener el grado académico de Maestro en Ciencias, especialidad en: Telecomunicaciones. Comité de tesis:. Dr. Cesar Vargas Rosales Asesor de la tesis. Dr. José Ramón Rodrı́guez Cruz. Dr. Jorge Carlos Mex Perera. Sinodal. Sinodal. Dr. David Garza Salazar Director del Programa de Graduados. Diciembre de 2005.
(5) A mi esposa Silvia, a mi madre Rosa Marı́a, a mis hermanos José Martı́n, Gilberto, Horacio y Marbila. Por su amor, su comprensión, su apoyo y su confianza..
(6) Reconocimientos. A mi esposa Silvia que ha sido la base de mi determinación por continuar estudiando, quien me ha proporcionado su amor, su confianza, su esfuerzo y comprensión. A mi madre Rosa Marı́a que ha servido como ejemplo y me ha brindado su apoyo en todo momento, sin esperar nunca una retribución a cambio y dispuesta siempre a darlo todo por el bienestar de sus hijos. A mi hermano José Martı́n y su esposa Marı́a Magdalena, a mis hermanos Gilberto, Horacio y Marbila con quienes estaré siempre en deuda por todo lo que me han apoyado a lo largo de mi vida, por haberme proporcionarme techo, alimento y apoyo económico en los momentos de crisis padecidos. A mi tı́o Miguel y a su familia por el apoyo y la confianza brindada. A todos los compañeros de la maestrı́a que me acompañaron y apoyaron durante mi estancia en el Tecnológico, especialmente a Hilda, Brenda, Elo, Eric, Oziel, Paco, Toño, Pepe, Jere, Victor, Fernando, Michel, Hugo, Javier y Mario. Al Dr. Cesar Vargas por guiarme en el desarrollo de mi tema de investigación. Al Dr. Carlos Mex y Dr. Ramón Rodrı́guez por aceptar ser mis sinodales. A mis suegros Juan y Guillerma por el apoyo recibido y la confianza brindada. Pero sobre todo gracias a Dios por bendecirme de esta forma.. Eulogio Fabián Ocura Camacho Instituto Tecnológico y de Estudios Superiores de Monterrey Diciembre 2005. vi.
(7) Clusterización en redes Ad Hoc de gran escala Eulogio Fabián Ocura Camacho, M.C. Instituto Tecnológico y de Estudios Superiores de Monterrey, 2005. Asesor de la tesis: Dr. Cesar Vargas Rosales. Una red Ad Hoc es conocida por su propiedad de auto organizarse y ser adaptable, lo que significa que una red puede ser formada y modificada rapidamente sin necesidad de sistemas administrativos. El término Ad Hoc significa que puede tomar formas diversas en un escenario determinado e implica que un dispositivo de este tipo puede ser móvil, permanecer independiente o solitario o bien conectado a una red especifica. Los algoritmos de clusterización tienen como función agrupar a los nodos con fundamento en una o varias caracterı́sticas particulares, y sirven de base para poder efectuar una medición del desempeño que se tiene en una red. No obstante estos algoritmos aun no han sido plenamente aplicados a redes de gran escala, donde la densidad de los nodos y su movilidad afectan de forma diferente. Estos algoritmos carecen de alternativas para el ajuste de parámetros que les permitan manipular la estructura de los grupos formados, de tal manera que puedan variar las condiciones establecidas o resultantes del algoritmo de clusterización. Permitiendoles de esta forma tener mayor control sobre los escenarios que se establezcan y contar con una herramienta que les proporcione la capacidad de adecuarse a las necesidades que se presenten en una determinada topologı́a. El objetivo de esta investigación no es la de crear un algoritmo de clusterización, sino más bien establecer una forma natural de agrupación de los nodos mediante una distribución geográfica basada en la posición que tiene cada uno de ellos respecto al resto de los nodos creados y al alcance que tiene en base a su radio de cobertura. El siguiente objetivo es el de utilizar una segunda fase en el algoritmo de clusterización que pueda ser aplicado a cualquier algoritmo existente con la finalidad de ajustar parámetros que permitan la manipulación de la organización de la red, esto es, afectar elementos como: total de clusters formados y total de nodos gateway existentes.. i.
(8) Índice general. Reconocimientos. VI. Resumen. VII. Índice de cuadros. X. Índice de figuras Capı́tulo 1. Introducción 1.1. Justificación . . . . . 1.2. Objetivo . . . . . . . 1.3. Contribución . . . . 1.4. Organización . . . .. XI. . . . .. 1 1 2 3 3. . . . . . . .. 4 4 6 7 9 12 12 15. . . . . .. 17 17 21 22 28 29. Capı́tulo 4. Resultados Numéricos 4.1. Simulación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1.1. Escenarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 32 32 33. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. Capı́tulo 2. Antecedentes 2.1. Redes Inalámbricas Ad Hoc . . . . . . . . . . . . . . . . 2.2. Algoritmos de clusterización . . . . . . . . . . . . . . . . 2.2.1. Access Based Clustering Protocol (ABCP). . . . . 2.2.2. Cluster Based Routing Protocol (CBRP) . . . . . 2.2.3. The Zone Routing Protocol (ZRP) . . . . . . . . . 2.2.4. The cluster (α, t) framework . . . . . . . . . . . . 2.2.5. Algoritmos de Control de la Topologı́a de la Red . Capı́tulo 3. Descripción del Modelo 3.1. Generación del Escenario . . . . . . . 3.2. Algoritmo de clusterización . . . . . . 3.2.1. Clusterización Básica o Normal 3.2.2. Integración de clusters . . . . . 3.2.3. Cuantificación del Algoritmo .. viii. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . . . .. . . . . .. . . . .. . . . . . . .. . . . . .. . . . .. . . . . . . .. . . . . .. . . . .. . . . . . . .. . . . . .. . . . .. . . . . . . .. . . . . .. . . . .. . . . . . . .. . . . . .. . . . .. . . . . . . .. . . . . .. . . . .. . . . . . . .. . . . . .. . . . .. . . . . . . .. . . . . .. . . . .. . . . . . . .. . . . . ..
(9) 4.1.2. Análisis de Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1.3. Niveles Convenientes de Nodos Gateway . . . . . . . . . . . . . . . . 4.1.4. Cuantificación del Manejo de la Información de la Red . . . . . . . .. 36 52 56. Capı́tulo 5. Conclusiones e Investigaciones Futuras 5.1. Conclusiones Generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2. Investigaciones Futuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 61 61 62. Bibliografı́a. 63. Vita. 64. ix.
(10) Índice de cuadros. 3.1. Ejemplos de cálculo del posicionamiento de dos nodos en la red. . . . . . . .. 23. 4.1. Caracterı́sticas generales del escenario . . . . . . . . . . . . . . . . . . . . . . 4.2. Escenarios utilizados para cada una de las λ. . . . . . . . . . . . . . . . . . . 4.3. Radios de cobertura utilizados en las simulaciones en base al número de nodos generados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.4. Resultados obtenidos para los escenarios generados con λ = 50 y Υ de 30, 40 y 50 % . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.5. Resultados obtenidos para los escenarios generados con λ = 50 y Υ de 60 y 70 % . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.6. Resultados obtenidos para los escenarios generados con λ = 600 y Υ de 30, 40 y 50 % . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.7. Resultados obtenidos para los escenarios generados con λ = 600 y Υ de 60 y 70 % . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.8. Radios de cobertura y porcentaje de integración utilizados en las simulaciones en base al número de nodos generados . . . . . . . . . . . . . . . . . . . . . 4.9. Tabla para establecer el valor adecuado del porcentaje de nodos gateway que es la base para determinar el radio de cobertura y porcentaje de integración convenientes para un valor de λ. . . . . . . . . . . . . . . . . . . . . . . . . . 4.10. Costos por manejo de la información de la red para escenarios generados con λ = 50 aplicando las dos fases del algoritmo. . . . . . . . . . . . . . . . . . . 4.11. Costos por manejo de la información de la red para escenarios generados con λ = 600 aplicando las dos fases del algoritmo. . . . . . . . . . . . . . . . . .. 33 34. x. 36 38 39 40 41 53. 54 57 59.
(11) Índice de figuras. 2.1. Ejemplo de una red Ad Hoc con 5 nodos mostrando su radio de cobertura y las conexiones entre ellos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2. Diagrama del estado de transición de un nodo en el protocolo ABCP. . . . . 2.3. Descubrimiento de clusters adyacentes . . . . . . . . . . . . . . . . . . . . . 3.1. Generación de nodos con α =50x10−6 en un área de 1000 x 1000 m . . . . . 3.2. Escenario donde se muestran los enlaces entre los nodos basándose en su radio de cobertura. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3. Determinación del nodo lı́der del cluster. . . . . . . . . . . . . . . . . . . . . 3.4. Formación del cluster y revisión de nodos a dos saltos del lı́der. . . . . . . . 3.5. Revisión de nodos a tres saltos del lı́der. . . . . . . . . . . . . . . . . . . . . 3.6. Conformación final de los cluster. . . . . . . . . . . . . . . . . . . . . . . . . 3.7. Algoritmo de clusterización. . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.8. Algoritmo de integración. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1. Escenario donde se muestran los enlaces entre los nodos basándose en un radio de cobertura de 150 metros para λ = 50. . . . . . . . . . . . . . . . . . . . . 4.2. Escenario donde se muestran los enlaces entre los nodos basándose en un radio de cobertura de 175 metros para λ = 50. . . . . . . . . . . . . . . . . . . . . 4.3. Escenario donde se muestran los enlaces entre los nodos basándose en un radio de cobertura de 200 metros para λ = 50. . . . . . . . . . . . . . . . . . . . . 4.4. Gráfica del promedio de clusters formados en la red para λ = 50. . . . . . . . 4.5. Gráfica del promedio de nodos por clusters en la red para λ = 50. . . . . . . 4.6. Gráfica del promedio de nodos gateways existentes en la red para λ = 50. . . 4.7. Gráfica del promedio de clusters formados en la red para λ = 600. . . . . . . 4.8. Gráfica del promedio de nodos por clusters en la red para λ = 600. . . . . . . 4.9. Gráfica del promedio de nodos gateways existentes en la red para λ = 600. . 4.10. Gráfica del promedio de clusters formados en la red para λ = 300. . . . . . . 4.11. Gráfica del promedio de nodos por clusters en la red para λ = 300. . . . . . . 4.12. Gráfica del promedio de nodos gateways existentes en la red para λ = 300. .. xi. 6 8 11 18 19 24 25 26 26 27 30. 34 35 35 43 44 45 46 47 48 49 50 51.
(12) 4.13. Ejemplo de como se selecciona el radio de cobertura y porcentaje máximo de integración conveniente para el caso de λ = 300 teniendo como fundamento un 60 % promedio de nodos gateways. . . . . . . . . . . . . . . . . . . . . . . 4.14. Gráfica que muestra el efecto que tiene la aplicación del algoritmo en su segunda fase sobre los costos por manejo de la información de la red para escenarios generados con λ = 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.15. Gráfica que muestra el efecto que tiene la aplicación del algoritmo en su segunda fase sobre los costos por manejo de la información de la red para escenarios generados con λ = 600. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. xii. 55. 58. 60.
(13) Capı́tulo 1 Introducción. Los orı́genes de las redes móviles inalámbricas se remontan a los años 70. Obteniéndose los primeros resultados satisfactorios de comunicación inalámbrica en una red local en una fábrica suiza. Desde entonces, la investigación y desarrollo de medios y dispositivos que hacen posible las redes de esta naturaleza han experimentado un desarrollo muy notable. Uno de los puntos que ha permitido la solidificación de esta tecnologı́a se debe, en gran medida, a las ventajas con respecto a la movilidad para los usuarios en relación con las redes alámbricas convencionales. Siempre resulta cómodo sentirse con la libertad de desplazarse sabiendo que se tiene la oportunidad de seguir conectado. Resulta obvio que existen algunos factores que limitan el óptimo funcionamiento de un sistema inalámbrico, como lo es la distancia o radio de cobertura del usuario determinado por la potencia de transmisión de su equipo y la interferencia causada por causas naturales o artificiales. Existen dos tipos de redes inalámbricas, las convencionales que requieren algún tipo de infraestructura de red fija y una forma centralizada de administración, y las redes que no tienen ninguna infraestructura definida, llamadas redes Móviles Ad-Hoc, que consisten en nodos inalámbricos que poseen movilidad y pueden crear redes dinámicas entre ellos sin la necesidad de utilizar una infraestructura o soporte administrativo,[1].. 1.1.. Justificación. Los diversos algoritmos de clusterización tienen como función formar agrupamientos de los nodos dentro de una red inalámbrica con base en una o varias caracterı́sticas particulares, y sirven de base para poder efectuar una medición del desempeño que se tiene en una red, sin embargo, aun no han sido plenamente estudiados cuando varı́an parámetros como la densidad de los nodos y su movilidad que afectan de forma diferente a una red de menor escala. 1.
(14) Una forma de evaluar la eficacia de los algoritmos de clusterización consiste en la medición del número promedio de grupos creados, la proporción promedio de nodos gateway o frontera, y el tamaño promedio del cluster. Sin embargo estos algoritmos carecen de alternativas para el ajuste de parámetros que les permitan manipular la estructura de los grupos formados, de tal manera que puedan variar las condiciones establecidas o resultantes del algoritmo de clusterización. Permitiéndoles de esta forma tener mayor control sobre los escenarios que se establezcan y contar con una herramienta que les proporcione la capacidad de adecuarse a las necesidades que se presenten en una determinada topologı́a.. 1.2.. Objetivo. Cuando una red está formada por nodos solitarios que representan cada uno a un cluster, se presenta entonces una gran carga para cada uno de ellos y para la red en general debido al alto requerimiento de ruteo externo que se presenta, dado que el número de nodos frontera o gateway es muy elevado. Por otra parte si se forma uno o dos clusters muy grandes (megaclusters), sucede algo muy similar, si bien la cantidad de nodos gateway se reduce notablemente inclusive puede llegar a desaparecer, se tiene ahora el problema de que la carga es al interior del clusters lo que se se conoce como ruteo interno. Por estos motivos consideramos oportuno que los nodos lleguen a agruparse (formar clusters) de forma tal que el número de nodos solitarios sea reducido y a si mismo se evite lo más posible la existencia de megaclusters.. El objetivo de esta investigación no es la de crear un algoritmo de clusterización, sino más bien establecer una forma natural de agrupación de los nodos mediante una distribución geográfica basada en la posición que tiene cada uno de ellos respecto al resto de los nodos creados y al alcance que tiene en base a su radio de cobertura. El siguiente objetivo es el de utilizar una segunda fase en el algoritmo de clusterización que pueda ser aplicado a cualquier algoritmo existente con la finalidad de ajustar parámetros que permitan la manipulación de la organización de la red, esto es, afectar elementos como: total de clusters formados y total de nodos gateway existentes. Esto se explica de forma más detallada en el capitulo 2.. 2.
(15) 1.3.. Contribución. La contribución principal de este trabajo es el establecimiento de una segunda fase del algoritmo de clusterización para permitirle, a través de parámetros de control como potencia de transmisión y otros que serán introducidos, manipular la organización de la red, afectando elementos claves tales como: total de clusters formados, número de nodos por cluster y total de nodos gateway existentes.. 1.4.. Organización. Este trabajo está organizado de la siguiente forma: En el capı́tulo 2 presentamos un explicación relacionada con las redes Ad Hoc y sus caracterı́sticas ası́ como una descripción de clusterización y algunos de los protocolos que existen. En el capı́tulo 3 presentamos el modelo de la investigación y los parámetros propuestos a analizar en la clusterización de redes Ad Hoc. En el capı́tulo 4 mostramos los resultados obtenidos de la simulación. Finalmente en el capı́tulo 5 mostramos las conclusiones derivadas de los resultados obtenidos, ası́ como las sugerencias que tenemos para las investigaciones a futuro.. 3.
(16) Capı́tulo 2 Antecedentes. En este capı́tulo se aborda el concepto de las redes Ad Hoc, algunas de sus caracterı́sticas y propiedades más significativas. Ası́ como una explicación concisa del termino cluster y algunos de los algoritmos de clusterización más comunes existentes.. 2.1.. Redes Inalámbricas Ad Hoc. Las redes inalámbricas Ad Hoc están formadas por usuarios móviles que disponen de acceso a servicios de información de la misma y tienen capacidad de comunicarse entre si desde cualquier lugar donde se encuentren. La caracterı́stica que las identifica es que carecen de infraestructura definida, por lo que la red es totalmente móvil, y por ello los usuarios se mueven de forma independiente unos de los otros, llegando los nodos a auto organizarse y auto administrarse. Cualquier dispositivo que cuente con un microprocesador es un nodo potencial en una red Ad Hoc. Incluyendo teléfonos móviles, vehı́culos de motor, estaciones de información en carreteras, satélites, PDA’s, computadoras de escritorio y portátiles, [10]. Las aplicaciones para redes Ad Hoc son variadas, pudiendo mencionar el área militar, en zonas de desastres, en el sector comercial debido a la miniaturización de los dispositivos electrónicos, su proliferación y el creciente deseo de las personas por estar conectadas todo el tiempo. Una red Ad Hoc es conocida por su propiedad de auto organizarse y ser adaptable, lo que significa que una red puede ser formada y modificada rápidamente sin necesidad de sistemas administrativos. El término Ad Hoc significa que puede tomar formas diversas en un escenario determinado e implica que un dispositivo de este tipo puede ser móvil, permanecer independiente o solitario o bien conectado a una red especifica, [6].. 4.
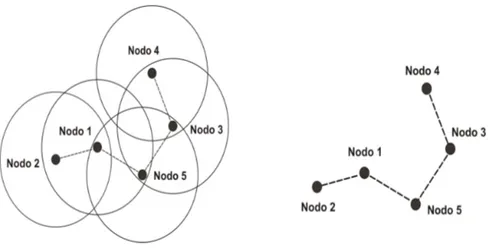
(17) Un dispositivo Ad hoc no solamente detecta la conectividad con nodos o dispositivos cercanos (vecinos), si no que puede identificar el tipo de dispositivo que es (laptop, Internet mobile phone, palmtop, etc.) y sus correspondientes caracterı́sticas. Si bien el termino Ad Hoc implica movilidad, los nodos o dispositivos en una red de estas caracterı́sticas pueden no siempre estar en movimiento y permanecer estacionarios, los cuales tendrán la capacidad de detectar la presencia de otros nodos o equipos y la habilidad de establecer comunicación con ellos cuando ası́ sea requerido. La comunicación en una red Ad hoc inalámbrica puede presentarse en formas diversas, una de ellas es cuando dos nodos se contactan en forma directa por un periodo de tiempo determinado hasta que la comunicación llega a su fin, o bien uno de los nodos se mueve de tal forma que queda fuera del área de cobertura del otro. Esta forma es conocida como comunicación punto a punto. Una segunda forma es cuando dos o más nodos se comunican entre ellos y están formando parte de un grupo o cluster. Este escenarios se conoce como comunicación remoto a remoto, [11]. Un ejemplo sencillo de una red ad hoc la podemos ver en la Figura 2.1 donde se observa el radio de cobertura de 5 nodos y el enlace que existe entre ellos. Si bien los nodos no pueden alcanzarse entre si en primera instancia dado que su radio de cobertura no se los permite, si pueden estar en contacto con todos a través de los nodos que si están dentro de su cobertura. Cuando un nodo se en encuentra dentro del radio de cobertura de otro nodo, se dice que es su nodo vecino o bien que lo puede alcanzar a un salto. Al observar la Figura 2.1 se puede observar por ejemplo que los nodos 2 y 5 son vecinos del nodo 1, o sea los puede alcanzar a un salto, mientras que el nodo 3 está a dos saltos del nodo 1 y el nodo 4 está a 3 saltos. Debido a la movilidad de los nodos la estructura de la red varı́a constantemente, dado que los nodos pueden ser agregados o eliminados aleatoriamente, cada proceso requiere de una actualización de la topologı́a de la red. La variabilidad de la red puede ser tan frecuente que la actualización no pueda ser propagada adecuadamente a toda la red. A medida que el tamaño de la red aumenta, los esquemas de ruteo plano no se escalan bien en términos de desempeño. Con la finalidad de incrementar la capacidad del sistema y la adaptabilidad en el ruteo, mejorar la utilización del ancho de banda, y reducir el retraso en las rutas, se empezó a efectuar algoritmos que permitieran a los nodos agruparse en cluster.. 5.
(18) Figura 2.1: Ejemplo de una red Ad Hoc con 5 nodos mostrando su radio de cobertura y las conexiones entre ellos. Un cluster consiste de un grupo de usuarios o nodos con caracterı́sticas especı́ficas donde uno de ellos es elegido como lı́der del grupo . El resto se les conoce como miembros del cluster o nodos ordinarios, y existen además los nodos gateway o frontera, que se encuentran dentro del rango de comunicación de 2 o más lideres de grupo, y son utilizados por ellos para comunicarse con clusters adyacentes. El nodo lı́der es quien posee la mayor información relacionada con la conformación del cluster (cuantos nodos forman el cluster, su identificación, cuales son nodos ordinarios, cuales son gateways, a cuales clusters se conectan los nodos gateway, etc).. 2.2.. Algoritmos de clusterización. Una red Ad Hoc, al no depender de algún tipo de infraestructura para efectuar la comunicación entre usuarios, los nodos se encuentran regularmente dispersos, motivo por el cual regularmente estos nodos no tienen una comunicación directa con otros nodos, razón por la cual es necesario utilizar nodos intermediarios a fin de poder alcanzar al nodo que se desee. La formación de cluster en una red ad hoc presenta ventajas importantes, como lo son la reutilización espacial de los recursos para incrementar la capacidad del sistema, una actualización jerárquica de la topologı́a (cuando un nodo se mueve, solo se requiere que los nodos que se encuentren dentro del mismo cluster actualicen su topologı́a y no todo el sistema), la generación y propagación de la información de ruteo es reducida, [6].. 6.
(19) Estas son algunas de las razones por las que se han propuesto algoritmos de clusterización para el control en este tipo de redes de comunicación. De los cuales podemos mencionar como ejemplo a los siguientes:. Access Based Clustering Protocol (ABCP), [6]. Cluster Based Routing Protocol (CBRP), [8]. The Zone Routing Protocol (ZRP), [4]. The cluster (α, t) framework, [10].. 2.2.1.. Access Based Clustering Protocol (ABCP).. Existen básicamente dos criterios para agrupar los nodos en una red de usuarios móviles. Uno es el basado en su identificación ( ID ) y el otro en el rango del nodo (node degree) el cual está relacionado con el número de enlaces directos que tiene. El nodo con más bajo ID o el nodo con mayor rango respectivamente son seleccionados para ser nodos lı́der del cluster. Estudios realizados han demostrado que una estructura de clusterización basada en el ID es más estable, resultando en un manejo menor de mensajes de actualización después que un nodo ha cambiado de posición. Sin embargo el criterio basado en el rango de los nodos es muy conveniente cuando los nodos están geográficamente distribuidos en grupos. La clusterización basada en ruteo puede hacer que una red grande aparente ser más pequeña, y más importante aun, puede hacer que una topologı́a muy dinámica aparente serlo mucho menos. Por consecuencia el objetivo fundamental del ABCP es crear una estructura de cluster estable que se pueda desarrollar rápidamente y no requiera de un conjunto de mantenimiento elevado, [6]. El ABCP define el formato de cada mensaje, describe la forma en que debe responder un nodo cuando recibe un mensaje, especifica como un nodo manejara los errores y cualquier condición anormal. Permite a la red cambiar incluso cuando la formación de clusters este en progreso. Para la formación de un cluster, cada nodo declara su intención de ser el nodo lı́der y la envı́a a través de la red. Aquel nodo que lo haga antes que los nodos vecinos que se encuentran a un salto se convierte en el nodo lı́der. El resto se convierte en nodo miembro del cluster.. 7.
(20) Figura 2.2: Diagrama del estado de transición de un nodo en el protocolo ABCP. En el caso de un nodo ordinario, tres situaciones propician que envı́e un mensaje de Request To Join (RTJ): 1.- Un nodo en una red ad hoc enciende su radio y se convierte en un recién llegado a la red. 2.- Un nodo detecta que su enlace con el lı́der del cluster es débil. 3.- Un mensaje de desconexión de su lı́der es recibido. Bajo cualquiera de estas circunstancias un nodo ordinario difunde un mensaje RTJ, fija su reloj y espera por la respuesta de los lideres de clusters vecinos. Tomara el primero que recibe y enviara un mensaje de unión con su ID para informar al nodo lı́der. Si pasado el tiempo establecido no recibe mensajes de bienvenida el nodo enviara mensajes hello para intentar convertirse en nodo lı́der. En la Figura 2.2 se muestra el bosquejo de este comportamiento. Los nodos lı́der tienen como responsabilidad mantener la estructura del cluster, por lo que si un mensaje RTJ es recibido, el envı́a un mensaje de bienvenida a cualquiera que lo haya enviado y revisa si va remover un nodo que está próximo a dejar el cluster o si simplemente lo agregara.. 8.
(21) 2.2.2.. Cluster Based Routing Protocol (CBRP). Es un protocolo de ruteo diseñado para el uso en red Ad Hoc móvil. Dentro de sus caracterı́sticas principales se puede mencionar: 1.- Operación plenamente distribuida. 2.- Menor inundación de tráfico (flooding) durante el proceso dinámico de descubrir rutas. 3.- Utilización explı́cita de los enlaces unidireccionales que de otra forma no serı́an utilizados. 4.- El rompimiento de rutas puede ser reparado localmente sin la necesidad de un redescubrimiento de rutas. 5.- Rutas subóptimas pueden ser reducidas a medida que son utilizadas.. Datos conceptuales. Tabla de vecinos: Se utiliza para probar el estado de los enlaces y la formación de clusters. Cada entrada de datos contiene,[8]: 1.- La identificación del vecino con el que tiene conexión. 2.- El tipo de nodo que es. 3.- El estado del enlace ( bidireccional o unidireccional ). Tabla de clusters adyacentes: Contiene información relacionada con los clusters adyacentes. Cada entrada de datos contiene, [8]:. 9.
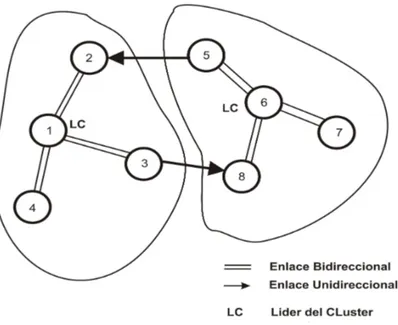
(22) 1.- La identificación del lı́der del cluster vecino. 2.- El nodo gateway que alcanza el lı́der del cluster vecino. 3.- El estado del enlace entre el nodo gateway y el cluster vecino (bidireccional o unidireccional).. Operación del protocolo. La operación del CBRP es enteramente distribuida. Los componentes principales son: La formación del cluster, el descubrimiento de clusters adyacentes y el ruteo. Formación de clusters: Todos los nodos inician en un estado indeciso. Cuando un lı́der de cluster recibe un mensaje hello de alguno de los nodos indecisos, enviara de forma inmediata un mensaje de bienvenida. Cuando el nodo indeciso recibe el mensaje de un nodo lı́der indicando que existe un enlace bidireccional entre ambos, aborta su reloj de estado indeciso y establece su estado como miembro del cluster, [8]. Dentro de las reglas para cambiar el nodo lı́der, se tiene que ningún nodo que no sea lı́der de cluster puede cambiar el estado de un nodo lı́der existente. Sin embargo si dos nodos lideres se aproximan y permanecen ası́ por un perı́odo de tiempo prolongado entonces uno de ello deberá perder su estado de nodo lı́der, [3]. Descubrimiento de clusters adyacentes: Se dice que dos clusters son bidireccionales si existe un nodo en uno de los clusters que tiene un enlace bidireccional con un nodo del otro cluster. Como se muestra en la Figura 2.3. El objetivo es encontrar todos los clusters que tienen un enlace bidireccional, para este propósito cada nodo mantiene una tabla de clusters adyacentes (TCA) que guarda la información de todos los nodos lideres vecinos, [8]. Ruteo: El ruteo en CBRP es basado en las fuentes de ruteo. Puede ser visto en dos fases: el descubrimiento de la ruta y los actuales paquetes de ruteo. 10.
(23) Figura 2.3: Descubrimiento de clusters adyacentes. debido a la movilidad de los nodos, una ruta fuente puede volverse menos óptimo con el paso del tiempo y debe ser reducida cuando sea posible. Cuando un nodo descubre que un enlace entre el y su siguiente nodo en la ruta no está disponible envı́a un paquete de error de ruta (ERR) y lo envı́a de regreso al origen del paquete para notificar la falla en el enlace, [3]. Después de que un nodo ha detectado una falla en la ruta y envı́a el paquete ERR, tratara de salvar el paquete de la mejor manera que le sea posible, utilizando para ello su propia información: 1.- Revisa si el nodo que sigue después del que perdió el enlace puede ser alcanzado a través de otro nodo que no se encuentra en la ruta de origen, buscando en su tabla de ruteo a los nodos que están a 2 saltos. 2.- Revisa si el nodo con el que se perdió el enlace puede ser alcanzado a través de otro nodo buscando en su tabla de ruteo a los nodos que están a 2 saltos. 3.- Si el paquete puede ser salvado, modifica la ruta original, fija una bandera R y envı́a el paquete a través de la nueva ruta.. 11.
(24) 2.2.3.. The Zone Routing Protocol (ZRP). Es un protocolo hı́brido mezcla de dos diferentes protocolos de ruteo, uno proactivo y otro reactivo. Puede ser definido por cada nodo individual y está organizado de forma autónoma. Cada nodo solo cuida de su propia zona de ruteo. Un nodo mantiene de forma proactiva rutas a los destinos dentro de un vecindario local, el cual se le conoce como la zona de ruteo. Más precisamente, el ruteo de un nodo está definido como una colección de nodos cuya distancia mı́nima en saltos desde el nodo en cuestión no es mayor que el parámetro referido como el radio de zona. Debido a que la zona de ruteo está definida por nodo, la zona de ruteo de los nodos del vecindario se traslapan, [2]. ZRP es uno de los más apropiados protocolos para las redes inalámbricas reconfigurables, debido a que inicia el procedimiento para determinar las rutas sobre demanda con un costo de búsqueda limitado y provee un eficiente y rápido descubrimiento de las rutas al integrar las dos clase radicalmente diferentes de protocolos de ruteo tradicional, [5]. Este protocolo permite a los nodos de manera individual identificar los cambios en las condiciones de la red dándole un conocimiento limitado del comportamiento de la misma. La zona de ruteo comprende unos pocos nodos dentro de uno, dos o más saltos desde donde el nodo central es formado. Dentro de esta zona una tabla de manejo basada en el protocolo de ruteo es utilizada. Un tema relacionado es el de las actualizaciones en la topologı́a de la red. Para que un protocolo de ruteo sea eficiente, los cambios en la topologı́a de la red deben tener solamente efectos locales. ZRP limita la propagación de la información al vecindario donde se efectuó el cambio solamente, provocando con ello que se limite el costo de la actualización de la topologı́a, [3]. Una de las principales desventajas del ZRP se relaciona con la selección de rutas en la red con los suficientes recursos para los parámetros requeridos de los estándares de calidad de servicio (QoS), y el alcanzar una eficiencia global en la utilización de los recursos, [2].. 2.2.4.. The cluster (α, t) framework. El objetivo del (α, t) framework es mantener una topologı́a eficiente que se adapte a la movilidad de los nodos de tal forma que el ruteo pueda ser más óptimo y sensible cuando los rangos de movilidad sean bajos y más eficiente cuando estos sean altos. El algoritmo organiza de forma dinámica los nodos en una red ad hoc donde los lı́mites probabilı́sticos 12.
(25) pueden mantenerse en la disponibilidad de las rutas de los destinos del cluster en un intervalo de tiempo especifico. El (α, t) framework puede ser además utilizado como base para el desarrollo de esquemas adaptivos para garantı́as de probabilidad de calidad de servicios (QoS) en redes ad hoc, [10]. Un más realistico uso es el de proveer algún tipo de garantı́a de calidad de servicio manteniendo las fallas en las conexiones por debajo de un umbral preestablecido y asegurarse con una probabilidad alta que un nivel mı́nimo de ancho de banda estará siempre disponible para las conexiones en curso. La idea básica del (α, t) framework es la de particionar la red en grupos de nodos (clusters) que sean mutuamente alcanzables dentro de las rutas internas del cluster y que se esperan estén disponibles por un periodo de tiempo t con una probabilidad α. Los efectos de estos parámetros están directamente relacionados, haciendo difı́cil obtener valores óptimos. Para valores grandes de t implica una mayor estabilidad en el cluster y reduce los requerimientos computacionales de mantenimiento del cluster. Sin embargo pueden provocar la reducción el la disponibilidad de rutas entre los nodos de un cluster para patrones de igual movilidad, lo que hace una condición difı́cil para alcanzar el lı́mite menor requerido de α. Por consecuencia valores grandes de t tienden a dar como resultado clusters más pequeños dando como resultado un ruteo más óptimo. La función de t es por consiguiente manejar el tamaño del cluster el cual controla el balance entre ruteo óptimo y eficiente, [10]. En un ambiente altamente dinámico el algoritmo debe ser distribuido, operar de forma ası́ncrona y requerir una mı́nima coordinación entre los nodos. Los clusters basados en el algoritmo (α, t) son entidades que son creadas, expandidas, contraı́das y eventualmente terminadas basados en la información de ruteo que es mantenido en un un conjunto de nodos móviles cooperativos. La fortaleza de algoritmo (α, t) consiste en que no requiere de una coordinación de nodos de alcance largo cuando se inicia la actividad de clusterización. Su función es la de modular las acciones del algoritmo de ruteo intracluster con un filtrado efectivo de su visión de la red. El algoritmo es simple, eficiente y capaz de auto iniciarse. Un nodo no puede procesar ni propagar información de ruteo de nodos que no pertenezcan a su propio cluster. No se requiere un control centralizado sobre el proceso de clusterización por lo que los nodos pueden asincronicamente unirse, dejar o formar un cluster.. 13.
(26) Propiedades del algoritmo (α, t). 1.- Activación del nodo: El objetivo primario de un nodo es descubrir un nodo adyacente y unirse a su cluster. El nodo deberá estar continuamente revisando a cada uno de sus vecinos hasta que encuentre un cluster que sea propicio para su integración. Si no llega a encontrarlo entonces creara su propio cluster, el cual será denominado como cluster huérfano o solitario, y esperara por otra oportunidad para agruparse con otros nodos. 2.- Activación del enlace: La activación de enlaces propicia que un nodo solitario intente unirse a un cluster. Para poder recibir información de la topologı́a del cluster de su nuevo vecino, el nodo solitario debe resetear su identificación de cluster (CID) para indicar su estado de no clusterizado. Una vez que recibe la información del cluster el nodo solitario evalúa la opción de unirse al cluster o regresar a su estado de cluster huérfano. 3.- Falla del enlace: El objetivo de que un nodo detecte una falla en el enlace es para determinar si ha provocado una perdida en las rutas del cluster hacia sus destinos. Primeramente cada nodo debe evaluar la disponibilidad de cada ruta de los destinos restantes del cluster en su tabla de ruteo. Después cada nodo envı́a información previniendo sobre la falla del enlace a los destinos del cluster restantes. Si un nodo detecta que un destino se ha vuelto inalcanzable entonces asume que el destinatario se ha desactivado o bien ha abandonado el cluster. Lo que propicia que el destinatario sea removido de la tabla de ruteo y no sea considerado en posteriores evaluaciones de rutas. Si un nodo detecta que otro nodo perteneciente al cluster se encuentra conectado pero no es alcanzable a través del algoritmo (α, t) entonces dejara voluntariamente el cluster, [10]. 4.- Expiración del reloj α: El reloj α controla el mantenimiento a través de ejecuciones periódicas del algoritmo de ruteo intracluster. El mantenimiento del cluster basado en la expiración del reloj α tiene dos objetivos fundamentales. Primeramente provee del mecanismo por el cual los nodos buscan de forma proactiva extender su alcanzabilidad de rutas. Después conduce a una sincronización de la topologı́a que provee la base para la convergencia del cluster.. 14.
(27) 5.- Desactivación del nodo α: Comprende cuatro eventos relacionados denominados: desactivación elegante, falla repentina, desconexión del cluster y salida voluntaria del cluster. En el caso de una desactivación elegante o salida voluntaria del cluster, el nodo anuncia su salida diseminando una actualización de la topologı́a a todos los nodos en el cluster indicando la ruptura de sus enlaces incidentes. Si un nodo se desconecta de un cluster debido a la movilidad o por una falla repentina, la reacción del resto de los nodos dependerá de la secuencia especificada para lograr la convergencia del cluster. Un nodo puede reconocer que ha sido desconectado del cluster al no tener rutas de conexión con el conjunto de nodos que forman el cluster. Entonces se convierte en nodo solitario y procede con las reglas previamente mencionadas. Sin embargo existe una situación poco conveniente y es que cuando un nodo se desconecta por falla repentina o bien por la movilidad existente, no todos los nodos restantes del cluster pueden ser capaces de determinar inmediatamente que el nodo ha dejado de ser alcanzable e intentaran revaluar sus rutas (α, t) en tal caso esos nodos determinaran que el destinatario no es alcanzable via una ruta (α, t) y consecuentemente ellos dejaran voluntariamente el cluster,[10].. 2.2.5.. Algoritmos de Control de la Topologı́a de la Red. Los algoritmos de clusterización existentes están diseñados para organizar o administrar un escenario determinado en una red, pero no están provistos de las propiedades o caracterı́sticas adecuadas para permitirles que lleguen a tener un control sobre la topologı́a de la misma. Estos algoritmos de clusterización siguen un procedimiento particular que los caracteriza, y hacen que su función principal sea realizada en forma conveniente, como son los casos de los algoritmos que recién acabamos de explicar. Sin embargo ninguno de ellos dispone de una herramienta que les permita adaptarse a las necesidades que se pudieran presentar en la red, teniendo de esta forma la alternativa de controlar la topologı́a establecida. No se ha encontrado información donde se muestre el caso de que un algoritmo tenga variables de control que permitan la manipulación de la estructura de la red. Debido prin-. 15.
(28) cipalmente a que su función está encaminada fundamentalmente en la organización o bien administración de los escenarios establecidos, pero no van más allá de su proceso. Su funcionamiento tiene como objetivo la creación de grupos de nodos o clusters tratando de que en la red se presenten situaciones favorables como lo son: la reutilización espacial de los recursos para incrementar la capacidad del sistema, la actualización jerárquica de la topologı́a ( cuando un nodo se mueve, solo se requiere que los nodos que se encuentren dentro del mismo cluster actualicen su topologı́a y no todo el sistema ) y la reducción de la generación y propagación de la información de ruteo. En base a esto existe un sin fin de literatura que explica al detalle las diversas investigaciones que se están haciendo o se han realizado en este campo. No ha sido posible sin embargo, encontrar casos donde se haga mención de la utilización de una fase que realice la tarea de controlar alguna variable básica en el proceso que permita a su vez modificar la topologı́a de la red con la finalidad de tener alternativas para que el sistema pueda adaptarse a alguna situación especifica. Los algoritmos de control de la topologı́a de la red son un tema que está abierto a la investigación y del cual se tiene información muy limitada, careciendo por este motivo de antecedentes adecuados que nos permitan referenciar lo obtenido en otros trabajos de investigación y que pudieran servirnos de base para comparar los resultados.. 16.
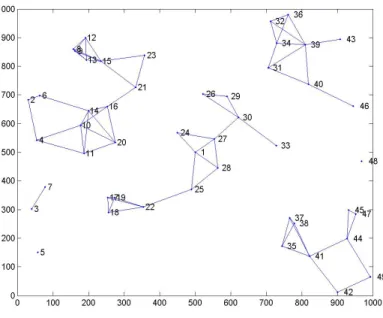
(29) Capı́tulo 3 Descripción del Modelo. En esta sección se propone un modelo para evaluar el efecto que tiene la clusterización en una red ad hoc de gran escala. Se muestra la forma en que se generan los escenarios a estudiar ası́ como la manera en que se efectúa la agrupación de los nodos (clusters), como se realiza la integración de los clusters más pequeños a otros de mayor tamaño y los principales parámetros que son estudiados.. 3.1.. Generación del Escenario. Para la creación del escenario se tuvo en consideración algunos parámetros básicos como lo son: 1.- El área del escenario: se tomo una superficie cuadrada de 1000 metros por lado, lo que por consecuencia hace un área de 1 000 000 m2 . 2.- Generación de los nodos: para la generación de los nodos en los diversos escenarios realizados, se siguió una distribución de Poisson espacial,[9], con α como el número promedio de nodos por unidad de área o densidad de nodos. En la Figura 3.1 se puede apreciar un escenario utilizando un valor de α = 50x10−6 nodos por metro cuadrado, lo que equivale a un valor promedio de 50 nodos. 3.- Radio de cobertura: se estableció un radio de cobertura R, determinándose que fuera igual para cada uno de los nodos generados. En la Figura 3.2 se muestra el mismo escenario observándose las lı́neas que representan el enlace existente entre los nodos, tomándose como base la distancia entre ello comprendida dentro del radio de cobertura.. 17.
(30) Figura 3.1: Generación de nodos con α =50x10−6 en un área de 1000 x 1000 m 4.- Tamaño teórico del cluster: Establece el tamaño que en teorı́a deberán tener en promedio los clusters que se forman en la red. Haciendo uso de tres variables. 1). Área del escenario (AE), que comprende la superficie en donde se efectúan las simulaciones. En nuestro caso el área del escenario es de 1 000 000 m2 . 2). El porcentaje de relación (ζ) es un valor que indica el porcentaje de nodos que puede ser capaz de manejar un nodo determinado en su tabla de ruteo, equivalente a un porcentaje del valor promedio de nodos que se tiene en la red. Lo establecimos en 15 % debido a que consideramos que es un nivel apropiado para el análisis. La razón de esta propuesta es que un número mayor al orden del 40 % del promedio de nodos en la red o más representarı́a una tendencia a formar dos o tres megaclusters, inclusive la posibilidad de un solo cluster (al superar el 90 %), lo cual no es apropiado. Por otra parte valores cercanos a 5 % o menos constituyen una tendencia a un número de clusters muy elevados con poblaciones reducidas o inclusive formados por un solo nodo, lo que tampoco es conveniente. Por ello vimos que un rango adecuado para el porcentaje de relación estaba entre un 10 y 20 % del promedio de nodos, situación que nos motivo a tomar un valor medio, derivando en el 15 % que utilizamos.. 18.
(31) Figura 3.2: Escenario donde se muestran los enlaces entre los nodos basándose en su radio de cobertura. 3) Promedio de nodos generados por unidad de área (α),se utilizaron valores de 50, 75, 100, 150, 200, 250, 300, 400, 500 y 600 millonésimas. para calcular el tamaño teórico de un cluster se utiliza la Ecuación 3.1.. T T C = (AE)(α)(ζ).. (3.1). Se hace uso de la función cielo para redondear el número al dı́gito superior, a fin de tener mayor holgura. 5.- Creación del cluster: para la integración de los nodos en clusters se determino seguir un proceso de agrupación natural de los nodos mediante una distribución geográfica basada en la posición que tiene cada uno de ellos respecto al resto de los nodos creados y al alcance que tiene en relación a su radio de cobertura, eligiéndose primeramente a un nodo lı́der en base al cual se fue realizando la clusterización de los nodos restantes que cumplieran con las reglas que más adelante, en este mismo capı́tulo, serán descritas.. 19.
(32) Cabe mencionar que esta formación de clusters, no es el objetivo de la investigación, pero al ser fundamental el tener una forma de agrupar los nodos, se determino seguir un procedimiento sencillo en lugar de aplicar alguno de los ya creados. Sin embargo es conveniente enfatizar que cualquier algoritmo que realice la agrupación de los nodos en la red es factible de ser utilizado, sin importar cuales condicionantes utiliza para efectuar el agrupamiento. Cada cluster puede estar conformado de tres tipos de nodos: Nodo lı́der, nodo ordinario y nodo gateway (frontera). El nodo lı́der como se ha mencionado es la base del cluster, es el que tiene la información de como está conformado el cluster y toma las decisiones convenientes cuando se requiera. El nodo ordinario forma parte del cluster pero no realiza ninguna función en especı́fico y el nodo gateway es el que tiene conexión con al menos un nodo perteneciente a un cluster diferente al suyo, por lo que es utilizado como puente para establecer comunicación con otros nodos en la red. 6.- Integración de clusters: una vez que los clusters estuvieron formados se procede a efectuar una integración de los clusters de tamaño menor a aquellos que sean sus vecinos y sean de mayor tamaño a ellos. En este criterio se utilizan dos variables: El tamaño teórico del cluster (TTC) y el porcentaje máximo de integración (Υ). El TTC se explico en el inciso 4, y básicamente consiste en el tamaño que en teorı́a tendrán en promedio los clusters que se forman en la red. El Υ corresponde al porcentaje mayor permitido a un cluster para que pueda ser considerado como factible a ser integrado a otro cluster de mayor tamaño. Esto es, es el nivel superior que se tiene de referencia para aplicar la segunda fase de nuestro algoritmo y comprende valores de 30,40, 50, 60 o 70 %. Este rango para Υ se determino tomando como valor principal al 50 %, después consideramos conveniente que un rango del 20 % máximo inferior y superior resultarı́a significativo dado que a un nivel cercano superior al 80 % la gran mayorı́a o literalmente todos los clusters caerı́an en ese rango y serı́an susceptibles de integrarse a otro cluster, con lo cual se darı́a la posibilidad de megaclusters. Por otra parte valores cercanos o inferiores al 20 % complicarı́an la integración de los clusters, dado que serı́an muy pocos los que cumplirı́an con la condición presentándose una tendencia a obtener resultados muy similares a los que se presentaron con el algoritmo de clusterización en su fase normal.. 20.
(33) Ambas situaciones nos motivaron a utilizar un valor de 20 puntos por encima y debajo del 50 %, debido a que no se acerca demasiado a los extremos, que como ya se ha mencionado representan una situación que no es favorable que se presente. La Ecuación 3.2 indica la forma en que se realiza el cálculo del nivel que será la referencia para los clusters que son susceptibles de ser integrados (CI).. CI = (T T C)(Υ).. (3.2). En todos los casos, se determina primeramente cuales son los clusters que tiene de vecinos y que superan el tamaño máximo de integración. Después se verifica cual de ellos tiene menor número de nodos para que se integre a él el cluster más pequeño previamente seleccionado. 6.- Parámetros de medición de clusters: Dentro de los parámetros que se tienen para medir el comportamiento de la red Ad Hoc se tiene al número de clusters creados, al número de nodos por cluster y al número de nodos gateway. Todos estos parámetros en condiciones antes y después de aplicar la segunda fase del algoritmo (fase de integración).. 3.2.. Algoritmo de clusterización. El proceso de clusterización comprende dos etapas: La clusterización básica o normal y la integración de clusters. En la primera se tiene el agrupamiento de los nodos basándose en el número de nodos vecinos que tiene cada nodo, el cual está regido por su radio de cobertura y como condicionante se tiene al tamaño teórico del cluster. En la segunda etapa, una vez conformados los clusters, se procede a analizar si existen clusters cuyo tamaño permita que se integren a otro cluster con las dimensiones convenientes para ello. Siguiendo obviamente ciertas condiciones que se explican más adelante.. 21.
(34) 3.2.1.. Clusterización Básica o Normal. EL diagrama del procedimiento de Clusterización Básica o Normal se muestra en la Figura 3.7, donde se indica en forma gráfica los pasos que se siguen para la agrupación de los nodos en clusters, comprendido básicamente por las siguientes etapas: 1.- Para iniciar la clusterización se verifica primeramente cuales nodos no tienen vecinos (nodos a un salto), para identificarlos como clusters unitarios o bien nodos solitarios o huérfanos. Los cuales formarán cada uno su propio cluster y tendrán el número de identificación (ID) mayor. Cabe mencionar que entre más grande sea el ID representa que el nodo lı́der tiene una posición menos relevante respecto al resto de nodos lı́der o mejor dicho entre más pequeño sea el ID significa que el nodo lı́der del cluster está mejor posicionado respecto al resto de los nodos. El término mejor posicionado hace referencia a la distancia que hay entre un nodo y el resto de los nodos en el escenario, para ello se calcula esta distancia utilizando dij =. q. (x − h)2 + (y − k)2 .. entre todos los nodos generados sabiendo que cada nodo i tiene coordenadas (h,k ) y el resto de los nodos j están ubicados en las coordenadas (x,y). [7] Después se hace una sumatoria para cada uno de ellos obteniéndose un valor que permitirá determinar el posicionamiento de cada nodo. Entre más pequeño sea este valor representara que el nodo tiene un mejor posicionamiento. Como ejemplo tenemos el Cuadro 3.1 a y b, donde se muestran los casos de los nodos 6 y 7 que son los que más nodos vecinos tienen basándonos a su vez en la Figura 3.3. Se puede apreciar las distancias que existen con respecto al resto de los nodos de la red y la suma total de estas distancias, la cual es en nuestro caso el indicativo de posicionamiento de cada nodo. El Cuadro 3.1 c muestra el resultado de esta suma y nos indica que al tener el nodo 7 un valor más bajo, este nodo es el mejor posicionado. 2.- Una vez que se han identificado los nodos solitarios, en caso de que estos existan, se procede a identificar al nodo que tenga mayor número de nodos vecinos o sea que tenga más nodos que pueda alcanzar a un salto. En caso de que existan dos o más nodos con esta caracterı́stica, como se puede apreciar en la Figura 3.3, donde tanto el nodo 6 como el 7 pueden alcanzar a 3 nodos en un salto, se procede a ver cual de ellos está mejor posicionado y se elige como el nodo lı́der primario (cluster 1), esto se puede observar en la Figura 3.4-A, 22.
(35) Cuadro 3.1: Ejemplos de cálculo del posicionamiento de dos nodos en la red.. a). b). Nodo. 1. 2. 3. 4. 5. 6. suma1. 6. 569.81. 389.87. 344.88. 194.94. 104.91. 0.00. 1604.41. 7. 479.84. 314.89. 299.90. 314.89. 179.94. 112.46. 1701.92. Nodo. 7. 8. 9. 10. 11. 12. suma2. 6. 112.46. 239.92. 314.89. 107.97. 164.95. 269.91. 1210.1. 7. 0.00. 122.96. 209.94. 194.94. 127.46. 254.92. 910.22. c). Nodo. Suma1. Suma2. Suma Total. 6. 1604.41. 1210.1. 2814.51. 7. 1701.92. 910.22. 2612.14. 23.
(36) Figura 3.3: Determinación del nodo lı́der del cluster. donde el nodo 7 es el nodo con mejor posicionamiento, lo cual fue descrito en el inciso (1), y por lo tanto es el nodo lı́der del cluster (NL). 3.- Una vez que el cluster tiene su nodo lı́der, el paso que prosigue es identificar nuevamente todos los nodos que están dentro de su área de cobertura ( nodos a un salto ) los cuales pasan a integrar el cluster de forma directa. En la Figura 3.4-A se observan los nodos que forman parte del cluster identificados con un cuadrado. 4.- En este punto se hace una comparación para ver si el tamaño teórico del cluster (TTC) es menor al número de nodos que integran el cluster, de ser ası́, el algoritmo ya no busca más nodos que sean factibles de integrar el cluster y se mantiene solamente con los nodos que estén a un solo salto del lı́der. Después se vuelve a efectuar el paso número 2 en busca de otro nodo lı́der para formar el cluster siguiente. 5.- En caso de que el TTC obtenido mediante la Ecuación 3.1 sea menor o igual al tamaño del cluster (TC) se procede a conocer los nodos que están a dos saltos del lı́der, esto es, los nodos vecinos de los nodos que están a un salto del lı́der y que no sean integrantes del cluster. Lo cual se puede observar en la Figura 3.4-B.. 24.
(37) Figura 3.4: Formación del cluster y revisión de nodos a dos saltos del lı́der. Una vez identificados se verifica si estos nodos que están a dos saltos del lı́der (nodos 5,9,10 y 12 de la Figura 3.4-B) tienen a su vez nodos vecinos diferentes a los integrantes del cluster, de no ser ası́ se procede a integrarlos al cluster. En la Figura podemos apreciar a los nodos 10 y 12 que se convierten en miembros del cluster. 6.- Si los nodos que están a dos saltos del lı́der tienen nodos vecinos diferentes a los integrantes del cluster (nodos 5 y 9 Figura 3.5), los cuales vienen a ubicarse a 3 saltos del nodo lı́der, se procede a determinar si estos nodos tienen a su vez nodos vecinos diferentes a los nodos del cluster. De no ser ası́ ambos nodos (el que se encuentra a dos saltos y su vecino) se agregan al cluster existente (nodos 5 y 4). 7.- En caso de que los nodos que están a 3 saltos del lı́der tengan al menos un nodo vecino diferente a los miembros del cluster, (nodo 2) entonces el algoritmo de clusterización concluye en esa rama y tanto el nodo que se encuentra a dos saltos del lı́der (nodo 9) y su vecino (nodo 2) no se incluye en el cluster. 8.- Este procedimiento a partir del paso 2 se repite constantemente hasta que no quede nodo por integrarse a un cluster.Todo el procedimiento es conocido como clusterización básica o normal. En la Figura 3.6 se muestra un ejemplo del resultado de este proceso.. 25.
(38) Figura 3.5: Revisión de nodos a tres saltos del lı́der.. Figura 3.6: Conformación final de los cluster.. 26.
(39) Figura 3.7: Algoritmo de clusterización.. 27.
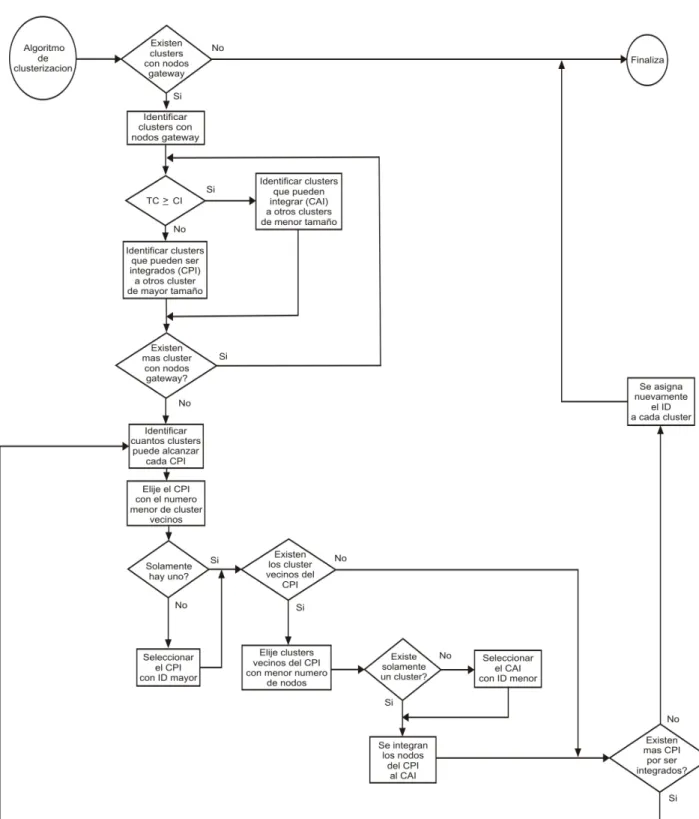
(40) 3.2.2.. Integración de clusters. EL diagrama del procedimiento de Integración de clusters se muestra en la Figura 3.8, donde se explica gráficamente la forma en que este fase es realizada, conformada básicamente por las siguientes etapas: Como se menciono anteriormente, una vez que los clusters se han formado, se procede a ser una revisión de los mismos para determinar cuales son factibles de ser integrados a un cluster de dimensiones mayores. 1.- Primeramente se revisa cuales clusters tienen nodos gateway o frontera lo cual nos indica que tiene al menos un cluster de vecino. 2.- Después de identificar los clusters que tienen nodos gateway se identifica a los cluster cuyo tamaño cumple con los requisitos para ser incorporado a otro cluster, para ello se hace uso de la Ecuación 3.2 donde el Υ puede corresponder al 30,40, 50, 60 o 70 %. Identificandose los clusters cuyo tamaño es menor o igual al CI. 3.- Una vez que se ha hecho la identificación, se procede a investigar cuantos clusters alcanza cada uno de ellos y se selecciona el que alcance el menor número. Si existen dos o más clusters en estas circunstancias se elige al cluster con el ID más alto. 4.- Cuando se tiene al cluster que alcanza el menor número de clusters o en su defecto con mayor ID, se revisan sus clusters vecinos y se elige aquel cuyo tamaño sea menor, si existen dos o más clusters se selecciona el que tenga el ID menor y entonces cada uno de los nodos es integrado al cluster vecino. Cuando solo se tiene un solo cluster vecino pues la integración se hace de forma inmediata. 5.- Después que un cluster ha sido integrado se procede a eliminar su número de identificación con la finalidad de que ya no participe en el procedimiento posterior de integración dado que podrı́a ser factible que otro cluster lo seleccionara para integrarse a él. 6.- Los pasos 3,4 y 5 son repetidos hasta que todos los clusters factibles de ser integrados hayan sido incorporados a otro cluster. Cabe mencionar que debido a la condición establecida en el paso 5, habrá ocasiones en que algunos cluster reúnan las caracterı́sticas para integrarse a otro cluster, sin embargo sus clusters vecinos ya fueron incorporados previamente a otro cluster y por lo tanto no existen más, en ese caso se determina que ese cluster en particular no puede integrarse y permanece con su formación original.. 28.
(41) 7.- Finalmente se hace una nueva identificación de los clusters recorriendo el ID que se tenı́a de acuerdo al espacio que dejaron los clusters que se integraron, es decir si los clusters 3 y 4 fueron incorporados a otro cluster, entonces los cluster 5 y 6 pasan a ser ahora los clusters 3 y 4 respectivamente.. 3.2.3.. Cuantificación del Algoritmo. Al aplicar nuestro algoritmo comprendido en dos fases, se tiene una reducción de elementos fundamentales en la conformación de una red, tales como el porcentaje de nodos gateway, el total de clusters formados y el tamaño de estos clusters. Sabemos que como resultado de la aplicación de la primera fase del algoritmo se forman en la red un determinado número de clusters que denominaremos (NC ), los cuales tienen en promedio un número de nodos representado por (NnC ) y existe un valor de nodos gateway indicado por (TnG). Tenemos que cada nodo dentro de un cluster en especı́fico maneja en sus tablas de ruteo (NnC-1 ) nodos, de forma similar un nodo gateway es capaz de manejar (TnG-1 ) nodos gateway. Por cada nodo que está en el interior de un cluster su costo es representado por (cni ) mientras que para un nodo gateway su costo se identifica como (cng ). De esta forma podemos decir que el costo de manejo de información de un nodo (cin) está dado por cin = (cni )(N nC − 1) y por su parte para conocer el costo de manejo de información de un cluster (ciC ) se multiplica el cin por el número de nodos que forman el cluster (NnC ). Lo cual estarı́a representado por ciC = (cin)(N nC) o lo que es lo mismo ciC = (cni )(N nC − 1)(N nC) finalmente para obtener el costo de manejo de información de los cluster en la red (cicR), basta con multiplicar el ciC por el número de cluster formados NC. ciCR = (ciCR)(N C) también representado como ciCR = (cni )(N nC − 1)(N nC)(N C) 29. (3.3).
(42) Figura 3.8: Algoritmo de integración.. 30.
(43) Por otra parte un nodo gateway tiene dos funciones, es un nodo que esta en el interior de un cluster y es también nodo de enlace, por tal motivo su costo de manejo de información es realmente la suma de dos costos, el del nodo interno y del gateway. Cada nodo gateway maneja (TnG-1 ) nodos gateway, su costo es representado como ciG = (cng )(T nG − 1) al ser también un nodo interno, maneja (NnC-1 ) nodos y su costo está dado por cin = (cni )(N nC − 1) por lo que el costo de manejo de información de los nodos gateway en la red es la suma de estos dos valores multiplicado por el total de nodos gateway existentes en la red ciGR = [(cng )(T nG − 1) + (cni )(N nC − 1)](T nG). (3.4). De lo anterior podemos deducir que el costo del manejo de la información de la red (ciR) está dada por la suma del costo de manejo de información de los cluster en la red más el costo de manejo de información de los nodos gateway en la red. Representándose como ciR = ciCR + ciGR o bien ciR = [(cni )(N nC − 1)(N nC)(N C)] + [(cng )(T nG − 1) + (cni )(N nC − 1)](T nG) (3.5). La Ecuación 3.5 es aplicable para cualquiera de los escenarios que se tengan, y es igualmente factible de utilizarse tanto en la primera fase (clusterización básica o normal) como en la segunda fase (Integración).. 31.
(44) Capı́tulo 4 Resultados Numéricos. En este capı́tulo se muestran los resultados matemáticos obtenidos en la simulación aplicando el algoritmo de clusterización descrito en el capitulo 3 a una red ad hoc, el cual consiste básicamente en dos etapas: En la primera se selecciona el nodo que tenga más nodos vecinos, de existir dos o más nodos con estas caracterı́sticas se toma el nodo que este mejor posicionado, es decir el que tenga menor distancia en relación a todos los nodos de la red y es entonces declarado nodo lı́der el cual procede a formar su cluster en base a sus nodos vecinos. En la segunda etapa, se hace uso de un porcentaje máximo de integración (Υ), el cual es utilizado en la segunda fase del algoritmo de integración, para determinar el tamaño máximo de los clusters que pueden ser integrados. Esta comprendido por valores de porcentaje de 30, 40, 50, 60 y 70 los cuales se multiplican por el tamaño teórico de cluster (TTC) que a su vez comprende el 15 % del total de nodos generados en la simulación. En base al factor de integración se seleccionan los cluster cuyo tamaño permite sean integrados a un cluster de mayor tamaño. El comportamiento del algoritmo es mostrado a través de gráficas y tablas, a fin de comprender de una mejor manera el efecto que se tiene en la red.. 4.1.. Simulación. La simulación fue realizada utilizando el software Matlab, representando estaciones o cuadros en un tiempo especı́fico, dentro de un campo de forma cuadrada cuyas dimensiones se pueden apreciar en el Cuadro 4.1, ası́ como las propiedades generales de cada nodo.. 32.
(45) Cuadro 4.1: Caracterı́sticas generales del escenario. 4.1.1.. Dimensiones del escenario. 1000 m x 1000 m. Área del escenario m2. 1 000 000. Población esperada de nodos (λ). 50, 75, 100, 150, 200, 250 300, 400, 500 y 600. Radio de cobertura (m). 75,100,125,150,175 y 200. % máximo de integración. 30, 40, 50, 60 y 70. Escenarios. Se estableció realizar varios escenarios por cada uno de los tamaños de población de nodos (Cuadro 4.2), esto con la finalidad de tener una base más sólida de resultados manejando valores promedio de los parámetros que están siendo observados como lo son: total de nodos en escenario, total de clusters formados, número de nodos solitarios, número de nodos por cluster y total de nodos gateway en la red. Para ello se realizaron 5 escenarios para los valores de lambda de 50 a 250, de 4 escenarios para lambda 300 y 400 y de 3 escenarios para lambda de 500 y 600. En cada uno de estos escenarios se generaban nodos basándose en una distribución de poisson espacial. La Figura 4.1 representa el primer escenario con λ = 50 y radio de cobertura de 150 metros. Después se procedió a disminuir o aumentar el radio de cobertura de los nodos según la densidad que se tuviera. Para el caso del escenario de 50 nodos se elevo a 175 metros mostrándose en la Figura 4.2 la afectación que tuvo en los enlaces de los nodos dentro del mismo escenario. Finalmente se modifico nuevamente el radio de cobertura ahora elevándose a 200 metros afectándose nuevamente la conformación de los enlaces entre los nodos, lo cual se muestra en la Figura 4.3.. 33.
(46) Cuadro 4.2: Escenarios utilizados para cada una de las λ.. λ. Escenarios. Total de Nodos Generados (N ) 1 2 3 4 5. 50. 5. 49. 54. 52. 53. 51. 75. 5. 86. 69. 84. 67. 63. 100. 5. 110. 121. 91. 85. 85. 150. 5. 157. 162. 146. 143. 150. 200. 5. 197. 199. 182. 200. 179. 250. 5. 243. 238. 236. 246. 266. 300. 4. 310. 277. 312. 323. –. 400. 4. 423. 376. 374. 398. –. 500. 3. 519. 507. 513. –. –. 600. 3. 621. 579. 626. –. –. Figura 4.1: Escenario donde se muestran los enlaces entre los nodos basándose en un radio de cobertura de 150 metros para λ = 50. 34.
(47) Figura 4.2: Escenario donde se muestran los enlaces entre los nodos basándose en un radio de cobertura de 175 metros para λ = 50.. Figura 4.3: Escenario donde se muestran los enlaces entre los nodos basándose en un radio de cobertura de 200 metros para λ = 50.. 35.
(48) Cuadro 4.3: Radios de cobertura utilizados en las simulaciones en base al número de nodos generados. Densidad de Población (N ). Radios de Cobertura. N < 100. 150,175y 200 mts. 100 ≤ N ≤ 250. 125,150 y 175 mts. 250 < N ≤ 400. 100,125 y 150 mts. 400 < N ≤ 600. 75,100 y 125 mts. Cabe mencionar que el radio de cobertura de 200 metros solo se aplica cuando existe una población menor a 100 nodos, después de ello el rango de cobertura empieza a bajar hasta llegar a un mı́nimo de 75 metros para una población mayor a 400 nodos. Esta variación de los radios de cobertura se muestra en el Cuadro 4.3.. 4.1.2.. Análisis de Resultados. Un ejemplo de los resultados obtenidos podemos apreciarlos en los cuadros 4.4 y 4.5 para una densidad baja (λ = 50). Mientras que en los cuadros 4.6 y 4.7 se tiene una densidad alta, (λ = 600). Estos casos son nuestros umbrales, 50 es nuestra densidad de población más baja mientras que 600 es la densidad mayor que utilizamos en las simulaciones. En las tablas podemos apreciar el contraste que existe entre ellas. Cada tabla muestra los siguientes parámetros: Porcentaje Máximo de integración, que como se ha explicado tiene la función de determinar cuales clusters pueden ser integrados a otros de mayor tamaño. Radio de cobertura, consistente en la distancia máxima a la cual puede transmitir adecuadamente cada uno de los nodos. 36.
(49) Total de nodos generados, es el número de nodos que se crean en cada escenario, utilizando una distribución de poisson espacial. Total de nodos solitarios, es el número de nodos que no tienen conexión con otros nodos, por lo cual están aislados en la red. % de nodos solitarios, es la relación que existe entre el número de nodos solitarios y el total de nodos generados. Total de clusters situación normal, consiste en el número de clusters formados al aplicar la primera fase del algoritmo de clusterización. Total de clusters integrando, es el número de clusters formados al aplicar la segunda fase del algoritmo de clusterización, consistente en integrar los clusters más pequeños a otros de mayor tamaño. Promedio de nodos por cluster situación normal, es el número de nodos que en promedio forman cada uno de los clusters resultantes de la primera fase del algoritmo de clusterización. Promedio de nodos por cluster integrando, es el número de nodos que en promedio forman cada uno de los clusters resultantes de la segunda fase del algoritmo de clusterización. % promedio de nodos gateway situación normal, es el número promedio que indica la relación entre los nodos gateway o frontera que existen en la red y el total de nodos generados en la misma, al aplicar la primera fase del algoritmo de clusterización. % promedio de nodos gateway integrando, es el número promedio que indica la relación entre los nodos gateway o frontera que existen en la red y el total de nodos generados en la misma, al aplicar la segunda fase del algoritmo de clusterización. Las variables de control que se manejan en la investigación están conformadas básicamente por tres factores: Tamaño teórico del cluster (TTC), radio de cobertura y porcentaje máximo de integración. Para nuestra investigación decidimos mantener fijo el valor del tamaño teórico del cluster y manipular el radio de cobertura y el porcentaje máximo de integración. Esto se puede observar en los cuadros 4.4, 4.5, 4.6 y 4.7.. 37.
(50) Cuadro 4.4: Resultados obtenidos para los escenarios generados con λ = 50 y Υ de 30, 40 y 50 % % máximo de integración Radio de cobertura (mts) Total de nodos generados (N) Total de nodos solitarios (NS) % de nodos solitarios (NS) Total de cluster situación normal Total de cluster integrando Promedio de nodos por cluster situación normal Promedio de nodos por cluster integrando % promedio de nodos gateway situación normal % promedio de nodos gateway integrando. 30 % 150. 175. 40 % 200. 150. 51.80. 175. 50 % 200. 150. 51.80. 175. 200. 51.80. 2.60. 1.00. 0.40. 2.60. 1.00. 0.40. 2.60. 1.00. 0.40. 4.99. 1.89. 0.76. 4.99. 1.89. 0.76. 4.99. 1.89. 0.76. 12.60. 9.60. 8.60. 12.60. 9.60. 8.60. 12.60. 9.60. 8.60. 11.60. 9.20. 7.20. 10.40. 7.60. 6.40. 10.00. 7.20. 5.80. 4.15. 5.54. 6.20. 4.15. 5.54. 6.20. 4.15. 5.54. 6.20. 4.51. 5.74. 7.30. 5.13. 6.97. 8.22. 5.38. 7.35. 9.05. 31.17. 44.39. 59.61. 31.17. 44.39. 59.61. 31.17. 44.39. 59.61. 26.24. 43.63. 50.65. 17.70. 35.97. 46.75. 16.06. 31.63. 43.53. 38.
(51) Cuadro 4.5: Resultados obtenidos para los escenarios generados con λ = 50 y Υ de 60 y 70 % % máximo de integración Radio de cobertura (mts) Total de nodos generados (N) Total de nodos solitarios (NS) % de nodos solitarios (NS) Total de cluster situación normal Total de cluster integrando Promedio de nodos por cluster situación normal Promedio de nodos por cluster integrando % promedio de nodos gateway situación normal % promedio de nodos gateway integrando. 60 % 150. 175. 70 % 200. 150. 51.80. 175. 125. 51.80. 2.60. 1.00. 0.40. 2.60. 1.00. 0.40. 4.99. 1.89. 0.76. 4.99. 1.89. 0.76. 12.60. 9.60. 8.60. 12.60. 9.60. 8.60. 9.60. 6.60. 5.40. 9.20. 6.00. 5.00. 4.15. 5.54. 6.20. 4.15. 5.54. 6.20. 5.63. 8.20. 9.81. 5.80. 9.03. 10.52. 31.17. 44.39. 59.61. 31.17. 44.39. 59.61. 12.96. 28.84. 40.83. 10.27. 24.58. 40.09. 39.
(52) Cuadro 4.6: Resultados obtenidos para los escenarios generados con λ = 600 y Υ de 30, 40 y 50 % % máximo de integración Radio de cobertura (mts) Total de nodos generados (N) Total de nodos solitarios (NS) % de nodos solitarios (NS) Total de cluster situación normal Total de cluster integrando Promedio de nodos por cluster situación normal Promedio de nodos por cluster integrando % promedio de nodos gateway situación normal % promedio de nodos gateway integrando. 30 % 75. 100. 40 % 125. 75. 608.67. 100. 50 % 125. 75. 608.67. 100. 125. 608.67. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 38.33. 26.33. 23.33. 38.33. 26.33. 23.33. 38.33. 26.33. 23.33. 11.33. 12.33. 13.33. 8.33. 9.67. 9.67. 6.33. 7.67. 8.33. 16.11. 23.11. 26.15. 16.11. 23.11. 26.15. 16.11. 23.11. 26.15. 54.76. 49.52. 45.67. 74.35. 63.41. 63.79. 99.78. 79.53. 74.35. 74.85. 87.44. 91.59. 74.85. 87.44. 91.59. 74.85. 87.44. 91.59. 46.98. 80.29. 90.08. 40.26. 73.58. 82.47. 37.83. 70.18. 80.58. 40.
(53) Cuadro 4.7: Resultados obtenidos para los escenarios generados con λ = 600 y Υ de 60 y 70 % % máximo de integración Radio de cobertura (mts) Total de nodos generados (N) Total de nodos solitarios (NS) % de nodos solitarios (NS) Total de cluster situación normal Total de cluster integrando Promedio de nodos por cluster situación normal Promedio de nodos por cluster integrando % promedio de nodos gateway situación normal % promedio de nodos gateway integrando. 60 % 125. 150. 70 % 175. 125. 151.60. 150. 175. 151.60. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 0.00. 38.33. 26.33. 23.33. 38.33. 26.33. 23.33. 5.33. 6.67. 7.33. 5.00. 5.33. 5.67. 16.11. 23.11. 26.15. 16.11. 23.11. 26.15. 119.55. 91.88. 84.13. 129.99. 114.83. 109.90. 74.85. 87.44. 91.59. 74.85. 87.44. 91.59. 34.15. 66.86. 77.39. 29.78. 59.55. 70.34. 41.
(54) Las figuras 4.4, 4.5 y 4.6 muestran el efecto que se tiene al modificar estos parámetros para el caso de un escenario con λ = 50. Se puede apreciar en la Figura 4.4 como a medida que el radio de cobertura se aumenta, se tiene una reducción en el número de clusters formados, el mismo efecto se presenta cuando se incrementa el porcentaje máximo de integración dentro de un radio de cobertura establecido. Al tener una densidad de población baja, la reducción se observa gradual. El caso inverso lo podemos observar en la Figura 4.5 donde se tiene un incremento en la cantidad de nodos que forman un cluster a medida que se aumenta el radio de cobertura al igual que el porcentaje de integración. Por otra parte, la Figura 4.6 nos muestra un caso diferente y es que a medida que el radio de cobertura es incrementado el porcentaje de nodos gateway en la red, como resultado de la aplicación del algoritmo de clusterización en su fase normal, se ve también incrementado. No obstante se observa como a medida que se aumenta el porcentaje de integración dentro de un radio de cobertura determinado, este porcentaje de nodos gateway se va reduciendo de forma gradual. Estos mismos efectos también se presentan en los escenarios con una densidad de población alta, situación que se muestra en las figuras 4.7, 4.8 y 4.9 para densidades de población de 600 nodos. Podemos observar como la reducción en el promedio de clusters formados en la red se da de forma más pronunciada para escenario de altas densidades (Figura 4.7) e igual sucede con el incremento que se presenta en el número de nodos que forman un cluster (Figura 4.8). Estas gráficas representan nuestros valores umbrales, además se agregan las gráficas 4.10, 4.11 y 4.12 para densidades de población de 300 nodos. El cual vendrı́a a representar un valor intermedio. Se pudo observar el mismo comportamiento descrito para el caso de las lambda 50 y 600.. 42.
Figure


+7



Documento similar
El contar con el financiamiento institucional a través de las cátedras ha significado para los grupos de profesores, el poder centrarse en estudios sobre áreas de interés
"No porque las dos, que vinieron de Valencia, no merecieran ese favor, pues eran entrambas de tan grande espíritu […] La razón porque no vió Coronas para ellas, sería
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
por unidad de tiempo (throughput) en estado estacionario de las transiciones.. de una red de Petri
En la parte central de la línea, entre los planes de gobierno o dirección política, en el extremo izquierdo, y los planes reguladores del uso del suelo (urbanísticos y
La Ley 20/2021 señala con carácter imperativo los procesos de selección. Para los procesos de estabilización del art. 2 opta directamente por el concurso-oposición y por determinar
Luis Miguel Utrera Navarrete ha presentado la relación de Bienes y Actividades siguientes para la legislatura de 2015-2019, según constan inscritos en el
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
