Sintonía de reguladores en línea (IFT)
54
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Título: “Sintonía de Reguladores en Línea (IFT)” Autor: Oscar Félix Jauregui Cabrera E-mail: [email protected] ; [email protected]. Tutores:. Dr. José R. Abreu Garcia Prof. Titular, Dpto. de Automática y Sistemas Computacionales Facultad de Ing. Eléctrica. UCLV. E-mail: [email protected] Ing. Diamir De Ávila Rodríguez Dpto. de Automática y Sistemas Computacionales Facultad de Ing. Eléctrica. UCLV. E-mail: [email protected]. Santa Clara 2006 “Año de la Revolución Energética en Cuba”.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información CientíficoTécnica.
(4) Pensamiento. i. PENSAMIENTO. “La inteligencia consiste no sólo en el conocimiento, sino también en la destreza de aplicar los conocimientos en la práctica”. Aristóteles.
(5) Dedicatoria. ii. DEDICATORIA. Dedico esta tesis a todos los que me han ayudado a realizarla, desde todos mis amigos hasta mis familiares que se han preocupado por mí. Pero no puedo dejar de mencionar a mi principal motivación para todo, mi hijo Pablo Oscar, al cual le hago una dedicación especial, que a pesar de no comprender en estos momentos, yo sé que con el cursar de los años me dará las gracias. Oscar Félix Jáuregui Cabrera.
(6) Agradecimientos. iii. AGRADECIMIENTOS. Hay muchas personas que tengo que agradecer, pero en primer lugar a mi madre y mi esposa quienes me han apoyado en todos los momentos difíciles por los que he pasado. Ha todas las personas que han colaborado directa o indirectamente, como mi papá, mi tía Odessa, mis amigos Irel, Marlén, Alain, Denis, Yadira, Yaremis, la familia Pando y muy importante, los tutores Dr. José Abreu y el Ing. Diamir De Ávila. Además, los profesores que me han hecho algunas aclaraciones como la profesora Maria del Carmen, y los profesores Borroto y Boris Luís Martínez. A mis amigos en general..
(7) Tareas Técnicas. iv. TAREAS TÉCNICAS. •. Determinar los fundamentos teóricos relacionados con los métodos de sintonía de reguladores, alcanzando un nivel de conocimiento e información válidos.. •. Profundizar en la comprensión del método “Sintonía de reguladores en línea (IFT)”.. •. Crear el programa para la implementación del método.. •. Ejecutar pruebas usando los valores hallados de acuerdo al IFT.. •. Analizar los resultados de las pruebas y comparar con otros métodos de sintonía.. •. Elaborar un informe con los resultados del trabajo..
(8) Resumen. v RESUMEN. El presente trabajo tiene como principal reto realizar un estudio pormenorizado sobre el método de sintonía de reguladores en línea, conocido en el idioma inglés como Iterative Feedback Tuning (IFT). El mismo es de reciente utilización y es usado para plantas con parámetros cambiantes. Muchos de los procesos reales presentan un ajuste con métodos que suponen parámetros fijos, lo que en ocasiones provoca deficiencias en las industrias. Aquí se realiza un estudio de los principales métodos utilizados, en muchos de los cuales no se tiene consideración en sus diseños de la presencia de disturbios o de ruido, en cambio, el IFT sí lo tiene presente. Se analizará detalladamente el método en cuestión, así como la sintonía del regulador PID. El IFT se implementa en un programa basado sobre el lenguaje de programación del MATLAB, pues realizar el cálculo de los parámetros del regulador sería muy engorroso. Se escogen dos casos de estudio, los que permitirán realizar una comparación entre el método más conocido y utilizado, Ziegler y Nichols, y el expuesto (IFT)..
(9) Tabla de contenidos. vi TABLA DE CONTENIDOS. INTRODUCCIÓN....................................................................................................................1 CAPÍTULO I “GENERALIDADES DE DIFERENTES MÉTODOS DE CONTROL” ............4 1.1 PARTICULARIDADES Y BENEFICIOS DE LOS SISTEMAS AUTOMÁTICOS............................................................. 4 1.2 BREVE HISTORIA DE LOS SISTEMAS AUTOMÁTICOS ........................................................................................ 5 1.3 EFECTO DE LOS REGULADORES AUTOMÁTICOS .............................................................................................. 8 1.4 MÉTODOS DE AJUSTES MÁS UTILIZADOS. ..................................................................................................... 10 1.4.1 Método de Ziegler y Nichols.................................................................................................................10 1.4.1.1 Ziegler-Nichols en lazo cerrado (oscilaciones sostenidas). ..............................................................11 1.4.2 Método Integral del Error. ...................................................................................................................11 1.4.3 Método Lugar Geométrico de las Raíces (LGR). .................................................................................14 1.4.4 Método de respuesta en frecuencia. .....................................................................................................16 1.4.5 Método Control por Modelo Interno (IMC). ........................................................................................17 1.4.6 Otros métodos.......................................................................................................................................17. CAPÍTULO II “MÉTODO DE AJUSTE IFT”........................................................................19 2.1 GENERALIDADES PARA EL AJUSTE DEL MÉTODO IFT ................................................................................... 19 2.2 SINTONÍA DEL MÉTODO IFT ......................................................................................................................... 20 2.2.1 Reducción al mínimo del criterio. ........................................................................................................23 2.2.2 Señales relacionadas a la salida ..........................................................................................................24 2.2.3 Señales relacionadas a la entrada........................................................................................................26 2.2.4 Criterio del gradiente ...........................................................................................................................27 2.3 RESUMEN DEL ALGORITMO .......................................................................................................................... 27 2.4 MODIFICACIÓN DEL MÉTODO IFT ................................................................................................................ 28 2.5 El peso de la frecuencia ..........................................................................................................................29 2.6 CONVERGENCIA DEL MÉTODO ...................................................................................................................... 29. CAPÍTULO III “IMPLEMENTACION DEL METODO IFT” .................................................31 3.1 CASO DE ESTUDIO I...................................................................................................................................... 31 3.1.1 Ajuste por Ziegler y Nichols. ................................................................................................................32 3.1.2 Ajuste por IFT ......................................................................................................................................32 3.2 CASO DE ESTUDIO II .................................................................................................................................... 35 3.2.1 Ajuste por Ziegler y Nichols. ................................................................................................................35 3.2.2 Ajuste por IFT ......................................................................................................................................37. CONCLUSIONES.................................................................................................................40 RECOMENDACIONES ........................................................................................................41 BIBLIOGRAFÍA ....................................................................................................................42 ANEXOS ...............................................................................................................................43.
(10) Introducción. 1. INTRODUCCIÓN El control automático de procesos es parte del progreso industrial. Se usa fundamentalmente porque reduce el costo de los procesos industriales, lo que compensa con creces la inversión en equipos de control. La eliminación de errores es otra contribución positiva del uso del control automático (Fernández, 2004). El principio del control automático se usa en diversos campos: en el control de procesos químicos y del petróleo, control de hornos en la fabricación del acero, control de máquinas y herramientas, y en el control y trayectoria de un proyectil. Además, su campo de acción se ha incrementado en los últimos años, pues el avance en la ciencia y la tecnología ha provocado que en la actualidad el control automático sea un elemento imprescindible en los sistemas más modernos y difundidos. Una rama importante del área del control y de la automatización de plantas es la sintonía de los parámetros del regulador a utilizar. En la actualidad cerca del 90% de los reguladores que están instalados en las industrias son PID1. Se ha demostrado que una gran cantidad de estos reguladores operan con ajustes deficientes. A través de la historia, se han desarrollado métodos de diversos tipos para lograr un ajuste adecuado de los controladores a nivel industrial que parten de disponer de una planta con parámetros constantes. Para esto se han desarrollado varios métodos que se explican más detalladamente en el primer capítulo: Ziegler y Nichols, Integral del Error, Lugar Geométrico de las Raíces, de respuesta en frecuencia, entre otros. Sin embargo, en un gran número de sistemas prácticos los parámetros son variables, lo que indica que los métodos de ajuste mencionados anteriormente no son útiles. Debido a este problema surgen nuevos métodos de sintonía tales. 1. PID – Proporcional-Integral-Derivativo.
(11) Introducción. 2. como la Sintonía Automática de Reguladores en Línea, conocido por sus siglas en idioma inglés como IFT (Iterative Feedback Tuning) (Hjalmarsson, 1994). Como nuevo método, surge la necesidad de realizar estudios y pruebas prácticas. de. la. eficiencia. de. este. método,. primeramente. mediante. simulaciones, para posteriormente pasar a niveles prácticos, es decir, la implementación en las industrias. En nuestro país este tema no ha sido tratado, es por eso que nos damos a la tarea de estudiar y comprender el método, para de esta forma poder realizar simulaciones que permitan reafirmar todas las ventajas prácticas que proporciona el mismo. La realización de un programa basado en el lenguaje de programación del MATLAB facilitará el cálculo de los parámetros que permiten realizar las simulaciones de la planta. El demostrar la factibilidad de este método para mejorar perceptiblemente el funcionamiento del sistema a lazo cerrado sin necesidad de abrir el lazo de control y sin inversiones adicionales del hardware es uno de los principales objetivos del trabajo. A este se puede unir el lograr que sea impartido, ya sea de forma práctica o docente, a todo aquel que se vincule con la rama del control. Este método inicialmente fue propuesto para sistemas SISO2, aunque en la actualidad ya se han hecho estudios y se ha llevado a la práctica para sistemas MIMO3 (específicamente de 2x2) (Hjalmarsson, 1998). A este proyecto del Dr. H.Hjalmarsson se han unido varios colaboradores; entre ellos se puede citar a T.Birkeland, M.Gevers, S.Gunnarsson, O.Lequin, R.Mazaeda, C. De Prada, entre otros. Muchos programas se pueden realizar montados sobre cualquier lenguaje de programación, pero el más usado para este caso es el MATLAB. En este trabajo se desarrolló el IFT con dos casos en específico, si se desea cambiar los parámetros del sistema se pueden volver a variar sin afectar el algoritmo.. 2 3. SISO – Sistema de una entrada con una salida. MIMO – Sistema de múltiples entradas con múltiples salidas..
(12) Introducción. 3. Aunque este es un método que todavía no puede hacer historia, pues apenas tiene una década, es seguro que con el tiempo se impondrá sobre los otros debido a su efectividad en las industrias. El trabajo de diploma para el estudio y el análisis de este método está dividido en tres capítulos, llegándose al final a determinadas conclusiones y recomendaciones que resultan de consulta obligada para posteriores indagaciones.. Para. ilustrar. las. argumentaciones. se. dispone. de. los. correspondientes anexos (léase figuras y tablas) que complementan lo referido en el texto..
(13) Capitulo I “Generalidades de diferentes métodos de control”. 4. CAPÍTULO I “GENERALIDADES DE DIFERENTES MÉTODOS DE CONTROL”. 1.1 Particularidades y beneficios de los sistemas automáticos La automatización se compone de todas las teorías y tecnologías encaminadas de alguna forma a mejorar ciertas señales indicadoras que justifican y hacen necesario la implementación de los sistemas automatizados. Muchas de estas teorías están basadas en mejorar la producción, costo y calidad de los productos, otras se basan en la protección al medio ambiente, además de la seguridad del personal de trabajo, aunque no es menos cierto que la automatización tiende a sustituir el trabajo del hombre por el de la máquina. En cuanto a su aspecto tecnológico, puede decirse que siempre ha sido un campo propicio para la aplicación de los más recientes avances científico - técnicos. Al comparar los beneficios económicos y sociales que obtenemos al automatizar, son mayores a los costos de operación y mantenimiento del sistema. La automatización brinda algunas ventajas que sería válido resaltar: - Asegura una mejor calidad del trabajo del operador, lo que dependerá de la eficiencia del sistema implementado. Se obtiene una reducción de costos, puesto que se racionaliza el trabajo, se reduce el tiempo y dinero dedicado al mantenimiento, además, se obtiene una reducción en los tiempos de procesamiento de la información. - La flexibilidad para adaptarse a nuevos productos, es decir, la fabricación flexible y multifabricación, algo muy importante para las empresas, ya que pueden fabricar productos de diferentes formas. Esto se observa normalmente en las líneas de fabricación de autos y en otras industrias. - Se logra un conocimiento más detallado del proceso mediante la recopilación de la información y datos estadísticos del mismo, es por eso que se obtiene un.
(14) Capitulo I “Generalidades de diferentes métodos de control”. 5. mejor conocimiento del funcionamiento y operación de los equipos y máquinas que intervienen en el proceso. - Aumenta el rendimiento de los equipos y la facilidad para incorporar otros nuevos, además de sistemas de información. - Un impacto ambiental fuerte ya que disminuye la contaminación, permite la racionalización y el uso eficiente de la energía y de la materia prima.. 1.2 Breve historia de los sistemas automáticos Haciendo un poco de historia sobre los primeros sistemas automáticos y sus diseñadores (aunque en realidad eran aparatos automáticos), podemos nombrar algunos. Los relojes de agua de Karnak y Ktesibios en Egipto (1400 AC), el de Platón para despertar a sus alumnos (378 AC), la lámpara de aceite con regulación automática de nivel por Philon de Bizancio (siglo III AC), el cargador automático de flechas por Dionisio de Alejandría (250 AC) (Braslavsky, 2001). Unos de los primeros sistemas realimentados de la historia es el dispensador de vino, cuyo funcionamiento se describe en los libros de Herón. Se basaba en el principio de los vasos comunicantes y lograba que el volumen de vino suministrado fuera constante (ver figura 1). Otro de los sistemas de control es el molino de harina realizado por H.U. Lansperg (1200), de forma tal que la cantidad de grano suministrada al molino dependía de la fuerza del viento y la dureza del propio grano, permitiendo que el sistema funcionara en condiciones óptimas. Este distribuidor de grano es considerado como uno de los reguladores de la historia y su funcionamiento era muy sencillo e ingenioso (Braslavsky, 2001). En el siglo XVII se presentan diversos sistemas de regulación de temperatura, entre ellos los aplicados en el horno y la incubadora de Cornlius Drebbel (1696). El principio era que si la temperatura del horno subía se dilataba el contenido de un depósito de alcohol de forma que se desplazaba un juego de.
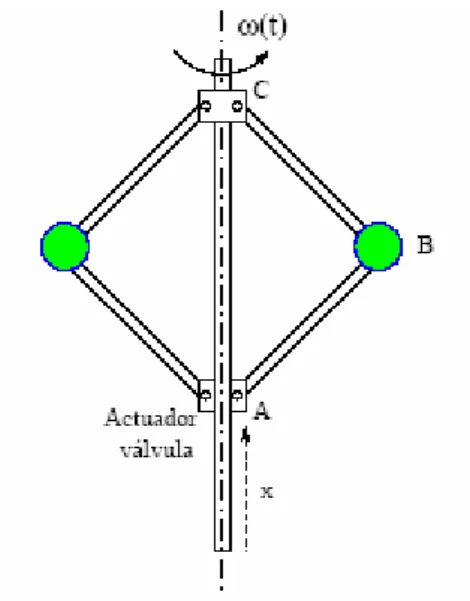
(15) Capitulo I “Generalidades de diferentes métodos de control”. 6. palancas que abría un orificio de salida de gases. Este es el primer sistema de control oficialmente reconocido en Europa.. Figura 1. “Dispensador automático de vino”. El principio de la realimentación, como se ha podido apreciar, ya se usaba desde hace algunos siglos, pero no es hasta que en 1788 James Watt inventa el governor que se puede decir que es el primer sistema de control industrial de la historia fabricado para su máquina de vapor. Los reguladores de Watt suministraban una acción de tipo proporcional y el control de velocidad sólo era exacto con una determinada carga mecánica. Además, solamente podían operar en un reducido rango de velocidades y necesitaban un continuo y costoso mantenimiento; en sí, se les denominaban moderadores, no controladores (Charles, 1998). En la figura 2 aparece la pieza más importante que suele llamarse “regulador de bolas", y que ejerce a la vez como captador, regulador y actuador. El artificio que hace funcionar al regulador de Watt es la realimentación. Una vez que se entienda como funciona se puede comprobar que no sólo puede aplicarse a la máquina de vapor, sino que puede servir de base para controlar otros sistemas físicos de muy diferente naturaleza. Además, la realimentación aparece a veces como un componente básico en muchos procesos de la.
(16) Capitulo I “Generalidades de diferentes métodos de control”. 7. naturaleza, incluso, en los seres vivos. En la figura 3 está representado en un diagrama de bloques el “Esquema de regulación en retroalimentación”.. Figura 2 “Regulador de bolas”.. Figura 3 “Esquema de regulación en retroalimentación”. Elementos esenciales del diagrama de retroalimentación: Yref -- Entrada de referencia o de consigna d(t) -- Entrada perturbadora y(t) -- Salida Controlador: Es el dispositivo que toma la diferencia є(t) entre la entrada de referencia Yref y la medida Ym(t) de la respuesta, la procesa y, como resultado del proceso, envía estímulos x(t) sobre el actuador..
(17) Capitulo I “Generalidades de diferentes métodos de control”. 8. Actuador: Actúa, con la potencia necesaria, sobre la planta. Planta o Proceso: es el sistema a controlar. Medidor: Es un aparato para medir el valor de la salida y(t). La idea del control a lazo cerrado es sencillo, con la entrada de referencia Yref el operador fija el valor deseado para la variable de salida y(t); el controlador recibe en su entrada la diferencia є(t) entre la entrada Yref de referencia y la medida Ym(t) de dicha salida en un instante t1, de modo que si esa diferencia es positiva (Ym < Yref) entonces, tras el proceso de la señal є(t), enviará estímulos x(t) al actuador para que éste ejerza una acción v(t) sobre la planta con el fin de que el valor de la salida y(t) vaya aumentando para t > t1. Cuando en otro instante t2 > t1 la diferencia sea negativa, la acción del controlador será la inversa, es decir, ejercerá una acción v(t) sobre la planta de forma tal que el valor de la salida y(t) vaya disminuyendo para t > t2.. 1.3 Efecto de los reguladores automáticos En adecuadas condiciones, si el controlador se diseña correctamente, es posible lograr que el valor de la salida se mantenga muy cercano al valor de la entrada de referencia, incluso, en presencia de la perturbación d(t). Para la utilización de los métodos de ajustes es necesario conocer los tipos de reguladores que existen, así como sus efectos.. Efectos de los reguladores - Regulador P (proporcional): Aumenta la ganancia. Reduce los errores en régimen permanente. Modifica el transciente y puede tender a desestabilizar el sistema en muchos casos si la ganancia aumenta demasiado - Regulador I (integral): Aumenta el orden del sistema, elimina el error en estado estable. Anula el efecto de las perturbaciones que afectan al sistema entre el regulador y la salida..
(18) Capitulo I “Generalidades de diferentes métodos de control”. 9. - Regulador PI (proporcional, integral): Ubica un polo en el origen eliminando el error en estado estable. Aumenta la ganancia y el orden del sistema combinando el efecto de los reguladores I y P. Hace que el transciente sea más rápido. - Regulador PD (proporcional, derivativo): Si el cero se encuentra muy próximo al origen con respecto a los polos dominantes del sistema, apenas modifica el transitorio del sistema comparado con un regulador P con la misma ganancia K. El transciente es más lento debido a la acción derivativa. - Regulador PID (proporcional, integral, derivativo): Es un compendio de los efectos de los reguladores anteriores. El mayor porciento de reguladores que existen a nivel mundial son PID, tendencia que parece fortalecerse a pesar del paso de los años y razón por la cual ha suscitado la atención de la comunidad científica para desarrollar nuevos métodos de ajuste. Por otra parte, el mayor problema que presentan es el ajuste inadecuado que poseen los mismos. Los parámetros que se ajustan en un regulador PID son: Ganancia Proporcional (Kp), Ganancia Integral (Ki) y Ganancia Derivativa (Kd), que en otras formas de representación se denominan Ganancia Proporcional (Kp), Tiempo Integral (Ti) y el Tiempo Derivativo (Td). Pudiéndose derivar fácilmente sus relaciones En la actualidad, los métodos de ajustes se pueden dividir en tres ramas específicamente. Métodos empíricos, que entre ellos se puede señalar el de Ziegler y Nichols, Método de Cohen Coon y el conocido como Control por Modelo Interno (IMC). La segunda rama es la que utiliza los métodos analíticos que agrupa de forma general la sintonía basada en el lugar geométrico de las raíces, el método de localización de polos y ajustes mediante criterios de optimización. La última de las ramas es la basada en la optimización de algún criterio de operación de. sistemas con dinámica variante, en este caso. podemos señalar la sintonía de reguladores en línea (IFT), método que se explicará en el siguiente capítulo y tema central de este trabajo (Huseyin, 2004)..
(19) Capitulo I “Generalidades de diferentes métodos de control”. 10. De forma general, para la utilización de muchos de estos métodos de ajuste es conveniente disponer de un modelo de primer orden (PORT). Para obtener un modelo. PORT existen varios criterios,. como la curva. de reacción,. Nomograma de Martin, Grosero, entre otros (Smith and Corripio, 1997). A continuación se explicarán algunos de los métodos de ajustes más utilizados en la actualidad para tener una idea de forma general del estado del arte de la sintonía de reguladores.. 1.4 Métodos de ajustes más utilizados. 1.4.1 Método de Ziegler y Nichols Las reglas de sintonía más comunes fueron desarrolladas y publicadas por primera vez por J.G.Ziegler y N.B.Nichols (Optimum Settings for Automatic Controllers, Transactions of ASME, Nov. 1942). Recién con la difusión de esta herramienta de análisis en el ámbito de la industria alrededor del año 1950, se comenzó a apreciar la simplicidad y validez técnica de las reglas de Ziegler y Nichols. Si bien muchos autores pulieron y modificaron posteriormente dichas reglas, éstas siguen siendo aún las más simples y efectivas de que se dispone. Sin lugar a dudas, una gran contribución de ellos. Este método es el más empleado en los ajustes de los sistemas de control de procesos, aunque no brinda un ajuste óptimo, pero posee un sencillo procedimiento de ajuste con relativamente buenos resultados (Rodríguez, 2003). Ziegler y Nichols presentan dos métodos de sintonía: de lazo cerrado y de lazo abierto. El método de lazo cerrado es el de uso más frecuente..
(20) Capitulo I “Generalidades de diferentes métodos de control”. 11. 1.4.1.1 Ziegler-Nichols en lazo cerrado (oscilaciones sostenidas). Para aplicar este método se coloca un controlador P con una ganancia Kc, posteriormente se brinda un paso por la entrada de referencia y se varía Kc hasta que la respuesta sea oscilatoria con amplitud constante. De acuerdo a las condiciones anteriores, la Kc que permite obtener oscilaciones sostenidas será la Kcrítica (ganancia crítica), y la duración o período de una oscilación será el Tcrítico (período o tiempo crítico), ya con estos valores se puede ajustar el controlador de acuerdo a la tabla 1.. Tipo de controlador. Kc. Ti. Td. P. 0.5Kcrítica. -. -. PI. 0.45Kcrítica. 0.8Tcrítica. -. PID. 0.6Kcrítica. 0.5Tcrítica. 0.125Tcrítica. Tabla 1 Ajuste de Ziegler-Nichols en lazo cerrado. Ventajas del método: - Procedimiento sencillo. - No se establece ninguna hipótesis sobre el modelo matemático del proceso.. Inconvenientes o desventajas: - Puede ser un procedimiento costoso en tiempo.. 1.4.2 Método Integral del Error. La búsqueda de una forma para cuantificar el comportamiento de los lazos de control ha llevado al establecimiento de índices de desempeño basados en la señal de error є(t). De estos los más conocidos son los llamados criterios integrales del error, siendo las más comunes definidas como:.
(21) Capitulo I “Generalidades de diferentes métodos de control” •. 12. Integral del error absoluto. ∞. IAE = ∫ e(t ) dt 0. •. Integral del tiempo por el error absoluto. ∞. ITAE = ∫ t e(t ) dt 0. •. Integral del error cuadrático. ∞. ISE = ∫ e(t ) 2 dt 0. Para la utilización de estos métodos se puede partir de un modelo PORT de la planta, aunque también es posible utilizar las tablas de minimización de las integrales en función de los parámetros del regulador de donde se determinan los ajustes. Además, es posible utilizar las integrales de Parseval. El objetivo esencial es determinar los parámetros del controlador que minimizan la función, por lo que estos parámetros son óptimos bajo el criterio de desempeño establecido, a continuación se analizará el caso de disponer de un modelo PORT. Si se tiene el siguiente diagrama de bloques de la figura 4:. Figura 4 “diagrama de bloques I”. Puede obtenerse un sistema PORT, suponiendo el siguiente sistema:.
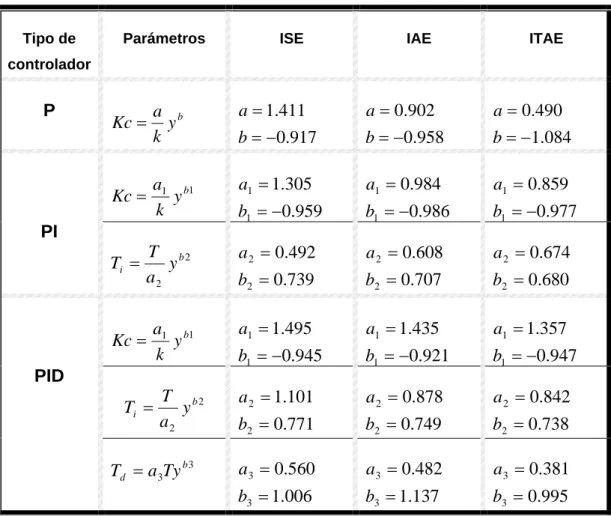
(22) Capitulo I “Generalidades de diferentes métodos de control”. 13. Se puede pasar a ajustar el controlador siempre y cuando esté dentro del rango. 0.1 < Y =. tm < 1 , pues de estar fuera implicaría un mal funcionamiento del T. controlador. Según la tabla 2 (López y colaboradores), es posible obtener la sintonía del regulador ya sea ante referencia o disturbio, eso dependerá del sistema que se obtenga.. Tipo de. Parámetros. ISE. IAE. ITAE. a = 1.411. a = 0.902. a = 0.490. b = −0.917. b = −0.958. b = −1.084. a1 = 1.305. a1 = 0.984. a1 = 0.859. b1 = −0.959. b1 = −0.986. b1 = −0.977. a 2 = 0.492. a 2 = 0.608. a 2 = 0.674. b2 = 0.739. b2 = 0.707. b2 = 0.680. a1 = 1.495. a1 = 1.435. a1 = 1.357. b1 = −0.945. b1 = −0.921. b1 = −0.947. a 2 = 1.101. a 2 = 0.878. a 2 = 0.842. b2 = 0.771. b2 = 0.749. b2 = 0.738. a3 = 0.560. a3 = 0.482. a3 = 0.381. b3 = 1.006. b3 = 1.137. b3 = 0.995. controlador. P. Kc =. a b y k. Kc =. a1 b1 y k. PI. Ti =. T b2 y a2. Kc =. a1 b1 y k. PID. Ti =. T b2 y a2. Td = a3Ty b 3. Tabla 2 “Sintonía por el criterio del error (López y colaboradores)”. Analizando algunas de las características de cada uno se puede decir que: - ISE Ofrece repuestas con menor sobreimpulso, mayor tiempo de estabilización y corrige los errores grandes. - ITAE Ofrece respuestas con mayor sobreimpulso, menor tiempo de estabilización y corrige los errores que persisten en el tiempo..
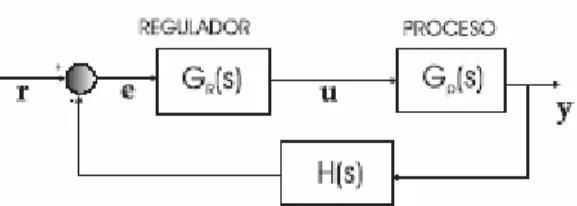
(23) Capitulo I “Generalidades de diferentes métodos de control”. 14. - IAE Presenta características intermedias entre el ISE e ITAE, corrigiendo los errores pequeños. Ventajas: - Permite sintonizar un controlador frente a distintas formas de entrada (escalón, pulso, entre otras.). – Se pueden sintonizar controladores con varios parámetros Desventajas: - Puede ser un procedimiento costoso en tiempo. - No permite sintonizar controladores en los que existan errores en estado estable.. 1.4.3 Método Lugar Geométrico de las Raíces (LGR). El método del Lugar Geométrico de las Raíces (LGR), ideado por Evans en 1948, es un método gráfico basado en una serie de reglas que permiten determinar la evolución de los polos en lazo cerrado de un proceso lineal con una ganancia proporcional variable. El LGR es una técnica empleada para el diseño de los reguladores PID. La posibilidad de conocer cómo cambia la posición de las raíces de lazo cerrado de un sistema sin necesidad de solucionar su ecuación característica es una ventaja que se aprovecha por este método, debiendo aplicar solamente reglas sencillas operando con la función de transferencia de lazo abierto (GH). Como es de suponer, la introducción de un controlador altera la ecuación característica y por consiguiente la posición de las raíces.. Figura 5 “diagrama de bloques II”..
(24) Capitulo I “Generalidades de diferentes métodos de control”. 15. La ecuación característica del sistema mostrado es: 1 + G R ( s )G P ( s ) H ( s ) = 0 Por lo que se puede apreciar que la función del controlador ( G R ) influye en las raíces de la ecuación en lazo cerrado. Para realizar al ajuste del regulador se necesita hallar el valor de la ganancia que tendrá el regulador según los requisitos de estado estacionario que pide el sistema a controlar. Alguno de estos requisitos son: - Error de posición (ep):. ep =. 1 donde K P = lim s →0 G R ( s )G P ( s ) H ( s ) 1+ kp. -Error de velocidad (ev):. ev =. 1 donde K v = lim s →0 sG R ( s )G P ( s ) H ( s ) kv. - Error de aceleración (ea): ev =. 1 donde K v = lim s →0 s 2 G R ( s )G P ( s) H ( s) ka. El valor de Kc obtenido garantizará los requerimientos de operación en estado estable, no así los de estado transitorio que deben obtenerse para combinaciones de Ki y Kd. Pero si se aplican las reglas derivadas de la condición de que G(s)H(S) = -1, dando valores desde 0 hasta infinito al parámetro variable, se obtiene la forma en que variará la posición de las raíces y del gráfico, pudiéndose obtener los valores de las demás constantes del controlador seleccionado. El trazado a mano alzada del LGR pierde exactitud por lo que los valores determinados no son plenamente confiables, sin embargo, existen programas computacionales como por ejemplo Matlab, que posibilita el trabajo con mayor exactitud y ahorro de tiempo para el diseñador. Para la obtención del LGR con Matlab se utiliza la instrucción rlocus (sistema), a cada punto de la curva resultante le corresponderá un valor de Kc de magnitud y fase del sistema, y al mismo tiempo, un valor de amortiguamiento y frecuencia de oscilación típicas de un sistema de segundo orden, de estas relaciones es posible determinar Kd y Ki..
(25) Capitulo I “Generalidades de diferentes métodos de control”. 16. Para obtener el valor de Kd y Ki de la gráfica se necesita tener otro requisito, pero esta vez del estado transitorio, ellos pueden ser el porciento de sobrecresta (Mp), factor de amortiguamiento (φ), o el tiempo de establecimiento (te). Con este dato se busca en la gráfica el valor de K que satisfaga ese requisito, ya con estos. valores de Kc, Ki. y Kd se tiene el regulador PID. ajustado por el método LGR.. 1.4.4 Método de respuesta en frecuencia. La técnica de respuesta en frecuencia es una de las más populares para el análisis y el diseño del control de sistemas lineales. Para la utilización de este método se necesita el requisito de estado estacionario tratado ya anteriormente en el LGR y el requisito de estabilidad relativa del sistema, que puede establecerse en función del Margen de Fase (MF) o del Margen de Ganancia (MG). Para que exista buena estabilidad relativa (Couchanowr, 1991) estos valores deben ser: el MF entre 30 y 60 grados, y MG mayor de 6 decibelios. Existen tres esquemas para el ajuste por este método; red de atraso (PI), red de adelanto (PD) y red de atraso adelanto (PID). La red de adelanto aumenta el ángulo de fase del sistema lo que conlleva a un mayor margen de fase aunque al aumentar la frecuencia de cruce el sistema se hace más rápido pero más sensible al ruido. La red de atraso aprovecha la atenuación para lograr el margen de fase deseado y para ello disminuye la frecuencia de cruce por lo que el sistema se hace más lento pero menos sensible al ruido. La red de atraso - delanto si está bien diseñada reúne las ventajas de las dos anteriores. Estos métodos de diseño se simplifican con la ayuda de programas computacionales (por ejemplo Matlab), con un gran ahorro de tiempo para obtener el controlador..
(26) Capitulo I “Generalidades de diferentes métodos de control”. 17. 1.4.5 Método Control por Modelo Interno (IMC). García y Morari en 1982 (Smith and Corripio, 1997) propusieron el método de Control por Modelo Interno (IMC), donde desarrollan algoritmos de control basados en la retroalimentación. Aunque en 1986 Rivera y colaboradores retoman el método mejorando el ajuste planteado por Morari. El método en sí consiste en diseñar un controlador cuya función de transferencia sea que el controlador será el inverso de la planta, pero esto normalmente es imposible ya que el regulador, en la mayoría de los casos, es físicamente irrealizable, por eso es que García y Morari colocan un filtro de primer orden con una constante de tiempo ajustable. El principal problema para ellos es que esto sólo es aplicable a sistemas PORT, pero Rivera y otros colaboradores propusieron otra variante que consiste en determinar el filtro de forma específica para cada tipo de proceso, resolviendo así el problema de que el controlador no sea para sistemas mayores de 1er orden.. 1.4.6 Otros métodos La mayoría de los métodos de ajustes que existen no tienen en consideración los parámetros cambiantes del proceso, lo que es frecuente en cualquier industria, pudiendo provocar funcionamientos inadecuados, es por eso que ninguno de los métodos explicados anteriormente soluciona este problema. Se han desarrollados métodos que sí contemplan el problema de tener procesos variantes. Uno de estos métodos es el Razonamiento Basado en Casos (RBC), el que consiste en recuperar situaciones anteriores y aprovechar el conocimiento adquirido en forma de casos de un proceso y su regulación. La intención final del RBC es utilizar estos casos para el diagnóstico y sintonía de reguladores PID en procesos no lineales, cambiantes o con necesidades de re-sintonía frecuentes..
(27) Capitulo I “Generalidades de diferentes métodos de control”. 18. Otro de los métodos es la sintonía de reguladores en línea (IFT), el cual se caracteriza porque su puesta en práctica es simple y presenta la capacidad de proporcionar mejoras significativas al funcionamiento de la planta. El hecho de que la planta puede generar la información necesaria para el control a lazo cerrado, tiene la ventaja de que el método pueda operar adecuadamente ante no linealidades, además, es una técnica flexible para sintonizar reguladores de una estructura deseada. La causa de que este método tenga poca difusión en las industrias cubanas es debido a su desconocimiento. El mismo permite ajustar los reguladores de las plantas aunque tengan parámetros cambiantes (algo muy usual), por eso el objetivo principal de este trabajo es explicar y difundir este método que tiene un amplio campo de aplicación..
(28) Capitulo II “Método de Ajuste IFT”. 19. CAPÍTULO II “MÉTODO DE AJUSTE IFT”. Un gran porciento de los reguladores PID presentan un ajuste fijo, sin embargo, la mayoría de los procesos presentan dinámica cambiante con el tiempo, por influencia de agentes externos e internos a la planta. La ciencia de la automática se ha encaminado a encontrar soluciones a esta problemática. Uno de los primeros trabajos presentados de un método capaz de ajustar un proceso con parámetros cambiantes fue el del Dr. H.Hjalmarsson en 1994 y que llamó IFT (Iterative Feedback Tuning), el que se explicará detalladamente en este capítulo. El IFT es un método que se caracteriza porque su puesta en práctica es simple y. presenta. la. capacidad. de. proporcionar. mejoras. significativas. del. funcionamiento de la planta. El hecho de que la planta pueda generar la información necesaria para el control a lazo cerrado, tiene la ventaja de que el método pueda operar adecuadamente ante no linealidades, además, es una técnica flexible para sintonizar reguladores de una estructura deseada.. 2.1 Generalidades para el ajuste del método IFT Para realizar el ajuste del regulador como primer paso de este método se debe definir un criterio de funcionamiento, en el cual se incluirán los parámetros libres a sintonizar. Típicamente, el criterio penaliza simultáneamente la diferencia entre la salida deseada a la planta y la real (el error). La ventaja principal del algoritmo es el hecho de ser un modelo libre. Otra de ellas es que este método es aplicable a una variedad amplia de procesos, incluyendo procesos que integran sistemas con polos complejos y sistemas no lineales en la vecindad del punto de trabajo, entre otros. El único requisito para realizar el proceso de iteración, es que se debe asegurar que el ajuste del regulador brinde la estabilidad del circuito a lazo cerrado..
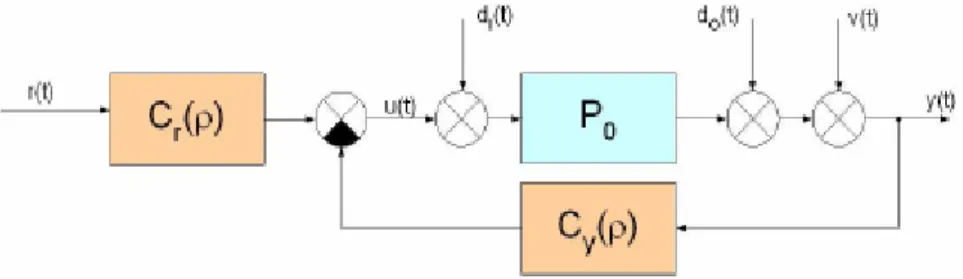
(29) Capitulo II “Método de Ajuste IFT”. 20. El objetivo del IFT es reducir al mínimo el criterio sintonizando los parámetros libres del regulador, según la ecuación (1). La optimización es realizada por un método iterativo, que requiere conocer el gradiente del criterio con respecto a los parámetros que sintoniza el regulador. La característica dominante del IFT es la valoración de este gradiente directamente de los datos experimentales. p * = arg p min J ( p ). (1). Para comprender mejor el método se debe saber que durante cada iteración que se efectúa se realizan experimentos (la cantidad de experimentos que se hacen depende del grado de libertad). En el primer análisis se obtienen N muestras de la salida (y1) y la señal de control (u1) en condiciones nominales, es decir con la referencia del lazo r. En el segundo análisis se obtienen otros dos conjuntos de N muestras, en este caso y2 y u2, lo que ya no sería para condiciones nominales, sino que por la referencia se aplicaría una señal que sería la diferencia de la referencia inicial con y1 obtenida en el experimento anterior, o sea,. r –y1. Un tercer experimento consiste en determinar los. conjuntos y3 y u3 teniendo como señal de referencia nuevamente r. Con estos datos se obtienen estimaciones del gradiente de la salida del lazo y de la señal de control. Posteriormente, los parámetros del regulador son actualizados de forma iterativa, es decir, que por cada iteración el regulador tendrá nuevos valores en su ajuste. Una de las opciones prácticas del diseño es que se pueden satisfacer peticiones comunes del diseño, ya sean de estado transitorio o estacionario, las cuales ayudan a un mejor ajuste del proceso.. 2.2 Sintonía del método IFT Considerando una planta desconocida descrita por la siguiente función en el tiempo. , donde Po es la función de transferencia. (F.T) de la planta, la cual es lineal e invariante en el tiempo, los di y do son disturbios ubicados a la entrada y salida de la planta, v es una señal de ruido..
(30) Capitulo II “Método de Ajuste IFT”. 21. Este sistema debe ser controlado por un regulador de dos grados de libertad, por tanto, la señal del controlador queda descrita según (2). Las funciones Cr y Cy son lineales e invariantes en el tiempo, pero dependen del vector p4 (el cual al calcularse permite la obtencion de Kc, Ti y Td). La señal r (t) es una señal externa que determina la referencia del lazo.. Lo descrito anteriormente se puede observar de una mejor forma en el diagrama de bloques de la (figura 6).. Figura 6 “diagrama de bloques III”. De ahora en adelante el argumento p será utilizado para precisar que la señal fue obtenida del sistema de lazo cerrado con el regulador C (ρ )∆{Cr ( ρ ), Cy (Ρ)} . También se omitirá el argumento del tiempo para facilitar la notación de las señales. Así y (p) y u (p) denotarán la salida del sistema y la entrada del sistema de control con el regulador (2) en la retroalimentación. Calculando el error. , es decir, la diferencia entre la respuesta alcanzada y la. deseada del sistema a lazo cerrado, y aplicando una señal r en la referencia, se obtiene la ecuación del error (3) sustituyendo sus valores.. 4. p – Se hace referencia al vector ro..
(31) Capitulo II “Método de Ajuste IFT”. 22. Este error ayuda a no seguir una incorrecta señal r de referencia, y de un error debido a los disturbios. El objetivo del diseño de control para un regulador de estructura fija dado por el parámetro p puede ser formulado naturalmente como minimización de una cierta norma de. y el esfuerzo de controlar u (p) sobre. los parámetros del regulador. Para eso se utilizará el criterio cuadrático siguiente:. Aquí el escalar. toma el esfuerzo del control. Los símbolos Ly y Lu. representan algunos filtros, por los cuales se pueden acentuar o suprimir las bandas de frecuencia específicas de la salida y de las señales de control respectivamente. Estos filtros se pueden por supuesto omitir (es decir, se fijan a 1), proporcionando flexibilidad adicional al diseño. Es también útil introducir algún tiempo (al comenzar la iteración), pues es una manera fácil y eficiente de evitar oscilaciones en el sistema a lazo. La meta del diseño es encontrar los parámetros opcionales del regulador definidos por (1). Esto significa que se desea sintonizar la respuesta a lazo cerrado, pues se pretende una respuesta de N longitud en el sentido de la media cuadrática. Si se define la respuesta de lazo cerrado deseada, se debe definir la salida del modelo de referencia (es decir y D = PM r ), esto genera un problema ya que tiene relación con el modelo de referencia del control adaptante (MRAC). En MRAC es necesario conocer el modelo de la planta controlada para reducir al mínimo un criterio del mismo tipo que (4), con respecto a parámetros del regulador. El gradiente de la función del criterio es esencial para tal minimización y el modelo se utiliza para su cómputo (ASTRÖM and WITTENMARK), por el contrario, el método IFT demuestra que el gradiente puede ser obtenido aunque el modelo del proceso controlado sea desconocido. Esto se logra evaluando los datos de la entrada-salida recogidos en el sistema a lazo cerrado verdadero durante un experimento especial..
(32) Capitulo II “Método de Ajuste IFT”. 23. 2.2.1 Reducción al mínimo del criterio. Para encontrar los parámetros óptimos del regulador se debe solucionar la ecuación (1). Esto significa que es preciso encontrar una solución para p en la ecuación.. (5) Si se pudiera calcular el gradiente. ,. se encontrarían los parámetros. óptimos por el algoritmo iterativo siguiente:. (6) Donde Ri es una matriz definida positiva (típicamente una aproximación de Gauss-Newton) del Hessiano de J, el Hessiano no es más que la matriz resultante de las segundas derivadas de la función a optimizar y que para el caso de dos variables (x, y) tiene la forma siguiente:. El otro término. es un escalar real positivo que determina el tamaño del paso.. La secuencia. debe obedecer algunos requisitos para asegurar convergencia. a un mínimo local, ya que especifica el paso que se da de un intervalo de optimización al próximo, lógicamente, mientras menor es este parámetro más exacta es la optimización, pero más lento el proceso de búsqueda (Hjalmarsson, 1994)..
(33) Capitulo II “Método de Ajuste IFT”. 24. Las señales necesitadas para la evaluación del gradiente (5) se pueden lograr durante experimentos especiales en el sistema de lazo cerrado formado por la planta verdadera y el regulador real. y. en la retroalimentación.. 2.2.2 Señales relacionadas a la salida Según la ecuación (3) se puede reescribir como:. (7) Donde So y To denotan la sensibilidad y la función complementaria de la sensibilidad del sistema de lazo cerrado. La derivada de. con respecto a los. parámetros del regulador está descrita por:. (8). (9). (10). (11) Con las ecuaciones 9, 10 y 11 se puede reescribir 8, quedando descrita de la siguiente forma:. (12) La derivada. implica la filtración de esta señal a través del sistema a. circuito cerrado, y eso conduce a la siguiente idea: en cada iteración i del.
(34) Capitulo II “Método de Ajuste IFT”. 25. regulador que se sintoniza, se realizan tres experimentos, en el primero se tomará el vector de N longitud de datos bajo condiciones normales de funcionamiento (y1). El experimento siguiente consiste en usar la señal (r – y1) construida de los primeros datos del experimento como señal de referencia, tomando otro vector de la salida (y2). El tercer experimento utilizará la misma señal de referencia que el primer experimento, obteniendo otro vector de la salida (y3). Así se obtienen las siguientes ecuaciones:. (13). (14). (15) Si los disturbios y el ruido en el segundo (14) y tercer (15) experimento fueran cero, se alcanzaría una realización perfecta de las señales necesitadas en (13) para calcular la función. . Si se analiza el disturbio y el ruido para cada. experimento, se llega a la conclusión que para el primer caso ninguno de los dos son un problema. El ruido en los otros dos experimentos no es un problema mayor debido a su cero medio. El único problema son los disturbios di y do, pues actúan sobre el sistema durante el segundo y tercer experimento. Eliminar estos disturbios de la planta verdadera es generalmente imposible, así que lo único que se puede hacer para mejorar la precisión para evaluar a es inyectar algunos disturbios adicionales en el sistema durante el primer experimento (esto aumenta la proporción de la “señal de ruido”). Debido a esto, se calcula un estimado del gradiente de la salida del lazo (16) que depende exclusivamente del controlador de 2DOF, teniendo entonces:. (16) y. (17).
(35) Capitulo II “Método de Ajuste IFT”. 26. 2.2.3 Señales relacionadas a la entrada Para este caso se hallan las señales u(p) y. requeridas en la ecuación. (5). La señal de control del sistema a lazo cerrado queda descrita en (18):. (18) Aquí también se realizan los mismos tres experimentos para tomar los tres vectores u1-u2-u3 bajo las mismas condiciones que se realizaron para tomar las salidas y1-y2-y3, por lo tanto, el esfuerzo del control durante los tres experimentos queda descrito por: (19). (20) (21) El siguiente paso es encontrar la función. :. (22). (23) De acuerdo a la ecuación (23) se puede rescribir (22) como:. (24).
(36) Capitulo II “Método de Ajuste IFT”. 27. Si se comparan (24), (20) y (21), se observa que bajo la misma suposición anterior (los disturbios y el ruido son cero durante el 2do y 3ro experimento), el propósito de los experimentos proporciona exactamente cuál es la necesidad para evaluar el. . Por lo tanto, se puede escribir el estimado del gradiente. del controlador (25) como:. (25) y. (26). 2.2.4 Criterio del gradiente Con las señales definidas en los temas anteriores, se puede formular un estimado basado experimentalmente del gradiente J (27):. (27) Esta estimación debe ser imparcial para que el algoritmo iterativo converja a un mínimo local. Por esta razón se necesitan los tres experimentos aunque los disturbios no actúen sobre la planta controlada y el ruido sea cero. Si se en vez de. utilizara la señal el. estimado. obtenido. en (16), y a. de. en vez de. tendría. en (25),. polarización. negativa. (HJALMARSSON, GEVERS, GUNNARSSON, 1998).. 2.3 Resumen del algoritmo A continuación se resumirá de forma breve este algoritmo iterativo. El regulador. operando en la planta, primeramente genera. las señales y1(i)-y2(i)-y3(i) y u1(i)-u2(i)-u3(i) (se puede obtener de las ecuaciones. (13). a. la. (15) y. y. de. la. (19). a. la. (21)). donde. si los disturbios están presentes..
(37) Capitulo II “Método de Ajuste IFT”. Se pasa a evaluar. 28. y. usando (16), (17), (25) y. (26); el próximo parámetro del controlador se calcula por la ecuación (28) descrita anteriormente. De esta forma debe repetirse el procedimiento completo sustituyendo (i) por (i+1).. (28). 2.4 Modificación del método IFT Antes de explicar la modificación que se le ha realizado, es válido afirmar que el método no se limita a un regulador simple ni a las complejidades del mismo, sino a las capacidades de cómputo. La modificación realizada al algoritmo iterativo descrito es para facilitar la sintonía de regulador, aunque el método es capaz de sintonizar todos los parámetros del regulador PID de 2DOF a la vez. Los especialistas en el tema han demostrado que según sus experiencias es mejor dividir el proceso de sintonía en dos procedimientos. Primeramente el regulador clásico PID de 1DOF se sintoniza iterativamente. Los parámetros restantes del PID de 2DOF entonces se sintonizan independientemente en el próximo procedimiento iterativo. Esto da lugar a experimentos más cortos, porque para un regulador 1DOF donde Cr(p) = Cy(p) por tanto las ecuaciones (16) y (25) se simplifican y el tercer experimento (15) llega a ser innecesario. El término. es entonces obviamente cero, si se eliminara el segundo. experimento (15), se podría utilizar. en vez de. en (17), así que el. tercer experimento vuelve a no ser útil. Otra modificación es que las constantes de tiempo integral y derivado no están sintonizadas independientemente una de la otra, sino que son relacionadas por un coeficiente para evitar la cancelación de la parte derivada del regulador incluso en un ambiente de poco ruido..
(38) Capitulo II “Método de Ajuste IFT”. 29. Aunque el ruido no es dominante, la parte derivada del regulador tiende a cero sin esta restricción.. 2.5 El peso de la frecuencia Los filtros Ly y Lu se pueden utilizar para formar la función de la sensibilidad de lazo cerrado sintonizado. Si se utiliza un filtro Ly, con un cierto espectro de la señal de entrada, después dará lugar a la atenuación del mismo espectro en el sistema a lazo cerrado. Si se utiliza el filtro Ly con el carácter derivado, entonces el proceso que se sintoniza convergería a un lazo de control que no es sensible a los de alta frecuencia (ruido) y la respuesta al cambio del setpoint tiende al comportamiento no oscilatorio. El filtro derivado Lu se debe incorporar a menudo para asegurar la acción estable del control. La ilustración detallada del. uso. de. estos. filtros. puede. ser. revisada. en. (HJALMARSSON,. GUNNARSSON, GEVERS, 1995).. 2.6 Convergencia del método La velocidad de la convergencia es influenciada principalmente por dos factores:. siendo este un escalar real positivo y Ri una matriz positiva,. descritos anteriormente e implicados en (6) y (28). El parámetro. determina el tamaño del paso. Sus valores durante el proceso. iterativo deben satisfacer que. y. (HJALMARSSON,. GEVERS, GUNNARSSON, LEQUIN, 1998). Cuanto más pequeño el tamaño del paso, más lentamente converge el algoritmo, esto puede traer la ventaja de lograr una optimización más exacta, pero se corre el riesgo de dar un paso incorrecto, solo se debe llegar a un compromiso a la hora de elegir el valor. Hay muchas opciones posibles para las matrices Ri. Solo tiene que ser definida positiva, pero la experiencia ha demostrado que la matriz identidad da una convergencia mucho más rápida..
(39) Capitulo II “Método de Ajuste IFT”. 30. Por lo descrito en este capítulo no cabe duda que es un método iterativo de la optimización del control. La mayor ventaja del IFT es que el criterio del gradiente está computado por datos que pueden ser medidos a lazo cerrado, lo que significa que no se basa en ningún modelo. El algoritmo converge a un mínimo local de la función de coste bajo la suposición inicial de un lazo de control estable. La función del criterio se expresa claramente y permite que se consideren requisitos comunes del diseño de control, tales como: reducción al mínimo del tiempo de establecimiento (settling time), porciento de sobrecresta (overshoot), entre otras. Este algoritmo está bien adaptado para los lazos con controladores PID, pero no se limita de ninguna manera a sintonizar un regulador simple. La optimización del funcionamiento de un lazo de PID sigue siendo un asunto actualizado en industria, puesto que técnicas más avanzadas del control confían en el buen funcionamiento de los lazos primarios, que incluyen típicamente a los reguladores PID. Este método se ha probado en sistemas verdaderos, demostrando capacidades prometedoras de esta técnica de la optimización. Por otra parte, el método de IFT requiere típicamente más datos disponibles que otros métodos para ajustar los reguladores PID (SCHLEGEL, BALDA, 2003)..
(40) Capitulo III “Implementación del Método IFT”. 31. CAPÍTULO III “IMPLEMENTACION DEL METODO IFT”. En el capítulo anterior se ha explicado en detalle el método IFT, en éste se demostrará que puede ser de gran utilidad con respecto a otros métodos de ajustes más conocidos. Para poder constatar esto se ha realizado un programa sobre el lenguaje de programación del MATLAB, el cual será de mucha ayuda para el cómputo de los parámetros del regulador, ya que en este método sería muy engorroso realizar sus cálculos a mano. Para comprobar la validez del método se verán dos casos de estudio, en los cuales se analizarán algunos detalles generales de la planta escogida, aunque es válido aclarar que para este método no es necesario conocer la F.T de la planta, siendo ésta una de las ventajas. Cada ejemplo se comparara con respecto a dos métodos, el descrito en este trabajo y el más difundido en la actualidad, el de Ziegler y Nichols, el cual fue explicado en el capítulo I. El regulador escogido para ajustar es un PI, demostrando que con el método se puede ajustar todo tipo de controlador. Se partirá de las raíces del sistema para de esta forma poder escoger un sistema con raíces reales y otro con complejas conjugadas. Otra de las consideraciones es dar un valor inicial al regulador, recordando que éste es el único requisito que exige el método, un ajuste inicial del regulador de forma tal que sea estable a lazo cerrado.. 3.1 Caso de Estudio I Para este caso se escogió que el sistema tuviera las siguientes raíces [-1 -2 -1]. Haciendo un análisis del sistema se observa que es de tercer orden y estable pero presenta un gran error, pudiéndose observar esto en la figura 7. Para cualquier sistema el error puede presentarle grandes daños, es por eso que este sistema debe ser ajustado..
(41) Capitulo III “Implementación del Método IFT”. 32. Figura 7 “Respuesta sistema original”.. 3.1.1 Ajuste por Ziegler y Nichols. Haciendo el análisis para el cálculo de los valores del regulador por este método se tiene que la ganancia crítica del sistema es Kcrítica=18 y el período crítico Tcrítico=3, estos valores se puede obtener por varias vías de cálculo. Los valores del regulador se muestran en la tabla 3. Estimulando la referencia con un paso, se obtiene la respuesta donde se muestran los valores de las características más importantes (ver figura 8). Realizando un análisis de la respuesta, se puede referir que el problema del error queda resuelto por el integrador del regulador ya que elimina el error en estado estable. Otra observación es que el sistema es un poco oscilatorio en el transciente y el tiempo de subida es bastante rápido por el valor un poco elevado de Kp.. 3.1.2 Ajuste por IFT Para realizar el ajuste por este método fue elaborado un programa confeccionado en el MATLAB (ver anexo 1). Introduciendo las raíces al programa, se obtienen esencialmente los valores del regulador ajustado..
(42) Capitulo III “Implementación del Método IFT”. 33. Figura 8 “Respuesta ajustada por Ziegler - Nichols”. El programa fue elaborado en base a dos experimentos, tomándose un regulador de 1DOF y considerando 5 iteraciones, aunque para el método original las iteraciones son permanentes puesto que los parámetros de la planta están cambiando constantemente en tiempo real. Realizando el ajuste por IFT y calculando los valores del regulador, es simulado el proceso ante una entrada paso y se obtiene que el sistema regulado responde de una manera más eficiente (ver figura 9). Este método iterativo encuentra los valores óptimos del regulador minimizando la función de costo. Lo valores de las constante de tiempo se muestran en la tabla 3.. Método de Ajuste. Kp. Ki. Ziegler y Nichols. 8.1. 3.38. IFT. 0.65. 0.58. Tabla 3 “Ajuste Ziegler-Nichols e IFT”..
(43) Capitulo III “Implementación del Método IFT”. 34. Figura 9 “Respuesta ajustada por IFT”. Para analizar mejor las respuestas obtenidas se unen las tres gráficas (ver figura 10) para comparar los dos métodos. A simple vista queda demostrado que el método IFT presenta grandes aporte al control por su ajuste tan óptimo y casi exacto. Realizando. un. análisis. comparativo. entre. los. dos. métodos. de. las. características principales de la respuesta a la salida, se puede llegar a la conclusión que el ajuste por IFT muestra una mejor respuesta en cuanto al tiempo de establecimiento y porciento de sobrecresta, el único detalle negativo es el tiempo de subida, pero se puede llegar a un compromiso con respecto a este parámetro..
(44) Capitulo III “Implementación del Método IFT”. 35. Figura 10 “Comparación entre las respuestas. Caso I.”. 3.2 Caso de Estudio II Se ha escogido una planta la cual tiene raíces complejas conjugadas para de esta forma demostrar que el método IFT puede ajustar sistemas con este tipo de complejidad. Las raíces son: [-2.8637 (-0.5681+1.1930i) (-0.5681 - 1.1930i)]. Al igual que el caso de estudio anterior, el sistema mantiene el error en estado estable (ver figura 11). Se realizarán los mismos ajustes y de esta forma poder realizar algunas comparaciones de los valores obtenido en las simulaciones.. 3.2.1 Ajuste por Ziegler y Nichols. Para ajustar el regulador, y conociendo los valores críticos de ganancia y período (Kcrítica=15, Tcrítico=2.5), se pueden calcular los valores de la ganancia (Kc) y la constante de tiempo integral (Ki), estos se observan en la tabla 4..
(45) Capitulo III “Implementación del Método IFT”. 36. Figura 11 “Respuesta original”. Con los valores obtenidos del regulador se puede pasar a la simulación del lazo controlado, obteniendo como resultado la respuesta en la figura 12.. Figura 12 “Respuesta ajustada por Ziegler - Nichols”..
(46) Capitulo III “Implementación del Método IFT”. 37. Si se realiza un análisis de la respuesta, es posible concluir que el sistema controlado por este método no es eficiente, por consiguiente no sería factible aplicarlo, debido a las oscilaciones, el porciento de sobrecresta muy alto y el tiempo de establecimiento que no es muy bueno, aunque es válido añadir que el error en el estado estable queda eliminado.. 3.2.2 Ajuste por IFT Con el mismo programa utilizado para ajustar el caso de estudio I (con las raíces ya de este caso), se pueden obtener los valores del regulador ajustado (ver tabla 4).. Método de Ajuste. Kp. Ki. Ziegler y Nichols. 6.75. 3.38. IFT. 0.84. 0.75. Tabla 3 “Ajuste Ziegler-Nichols e IFT”. Con estos valores se simula el proceso y se obtiene la respuesta mostrada en la figura 13. Analizando la curva se observa que este método de ajuste presenta grandes ventajas sobre otros métodos, pues la gráfica proporciona una respuesta amortiguada y con cero error en estado estable. En la figura 14 se muestran las tres gráficas unidas para que se observen las diferencias entre estos dos métodos de sintonía utilizados. El ajuste por Ziegler y Nichols responde de una forma rápida, pero con un pico de sobrecresta muy alto, le provoca oscilaciones al sistema, y debido a las oscilaciones el tiempo de establecimiento no es muy aceptable. En cambio, el ajuste por IFT permite una respuesta amortiguada al sistema de lazo cerrado. Con los casos de estudios propuestos se ha podido ejemplificar y comparar el ajuste por el IFT..
(47) Capitulo III “Implementación del Método IFT”. 38. Figura 13 “Respuesta ajustada por IFT”.. Figura 10 “Comparación entre las respuestas. Caso I”. Las simulaciones realizadas han demostrado que el método de ajuste IFT alcanza siempre un mejor funcionamiento, logrando valores de estabilidad muy.
(48) Capitulo III “Implementación del Método IFT”. 39. buenos (como el tiempo de establecimiento y el porciento de sobrecresta), notándose la diferencia de los valores entre los dos métodos. Además, el IFT es también óptimo con respecto a la presencia del ruido, mientras que los otros esquemas se diseñan para condiciones sin ruido..
(49) Conclusiones. 40. CONCLUSIONES Con el desarrollo del trabajo se han adquirido conocimientos de un nuevo método de ajuste, el cual permite regular plantas que presenten parámetros cambiantes, algo muy usual. Se ha alcanzado experiencia en cuanto a la elaboración de un programa para el cálculo de los parámetros del regulador con este método, pudiéndose con él realizar la implementación del mismo. Los objetivos propuestos se han cumplido, pues se han logrado solucionar los problemas que existían al iniciarse el trabajo, arribándose a las siguientes conclusiones:. •. Los métodos de ajuste han permitido que los procesos en las industrias puedan operar de una forma eficiente, constituyendo una pieza fundamental para el avance del control automático y de la producción de las empresas en particular.. •. Los métodos de sintonía que consideran que la planta tiene parámetros cambiantes presentan un mejor ajuste, así como los que tengan presente los disturbios y ruidos del sistema.. •. El programa realizado devuelve los parámetros óptimos del regulador.. •. Las simulaciones efectuadas demostraron la factibilidad del método de ajuste IFT el que cumple los requerimientos para los cuales fue diseñado.. •. El informe de investigación constituye una valiosa fuente bibliográfica para próximas indagaciones sobre métodos de ajuste que su diseño original consideren que la planta contenga parámetros cambiantes..
(50) Recomendaciones. 41. RECOMENDACIONES. El trabajo ha cumplido con el fin para el cual fue creado, pero esto no imposibilita que se realicen algunas recomendaciones pertinentes:. •. Realizar estudios en el futuro cercano sobre este método de sintonía, pero para sistemas MIMO.. •. Realizar estudios de las variantes aplicadas al método original.. •. Desarrollar estudios sobre el método Razonamiento Basado en Casos (RBC), puesto que puede ser usado para sistema con parámetros variables.. •. Lograr que este trabajo sea usado como material docente o complementario para el ajuste de reguladores en sistemas SISO.. •. Realizar comparaciones objetivas con otros métodos de ajuste conocidos..
(51) Bibliografía. 42. BIBLIOGRAFÍA ASTRÖM. K, B. WITTENMARK. Adaptive Control. Braslavsky J., V. Mazzone (2001). Historia del Control Automático. Universidad de Newcastle. Disponible en: http://www.csd.newcastle.edu.au/SpanishPages/claseslidesdownload/C01.pdf . Accedido el 12/03/06. Charles L. (1998). Feedback Control Systems. Couchanowr R. (1991). Process Systems Analysis Control. Fernández R. (2004). Fundamentos del Control Automático Industrial. Disponible en: http://www.sapiensman.com/control_automatico/control_automatico6.htm Accedido el 21/05/06. Hjalmarsson H., M. GEVERS, S. GUNNARSSON, O. LEQUIN. (1998). Iterative feedback tuning: theory and applications. IEEE Control Systems Magazine, Vol. 18, No. 4, pages 26 – 41. Hjalmarsson H., S. Gunnarsson, M. Gevers. (1994). A Convergent Iterative Restricted Complexity Control Design Scheme. Proceedings of the 33rd IEEE Conference on Decision and Control, Orlando, FL. p.1735-1740. Hjalmarsson H., S. GUNNARSSON, M. GEVERS. (1995). Model-free tuning of a robust regulator for a flexible transmission system. European Journal of Control, No. 1(2), page 148. Hjalmarsson H., T. Birkeland. (1998). Iterative feedback tuning of linear timeinvariant MIMO systems. Proceedings of the 37th IEEE Conference on Decision and Control, Tampa, FL, p. 3893-3898. Huseyin A. (2004). A New PID Tuning Technique Using Ant Algorithm. Proceeding of the 2004 American Control Conference Boston, Massachussets, p.2154-2156. Rodríguez J. (2003). Interfase gráfica para el diseño, ajuste y análisis automatizado de reguladores analógicos convencionales. Revista Colombiana de Tecnologías de Avanzada, Vol. 02. SCHLEGEL M., P. BALDA. (2003). Robust PID auto tuner - method of moments. Automatizace, Vol. 46, No. 4, pages 242-246. Smith C., A. Corripio. (1997). Control Principles and Practice of Automatic Process Control. Second Edition, Fl. Smith C., A. Corripio. (1997). Principles and Practice of Automatic Process Control. Second Edition, Louisiana State..
(52) ANEXOS Programa para el cálculo de los parámetros del regulador.. %Sistema continuo Bc= 1; Ac=poly([-2.8637 (-0.5681+1.1930i) (-0.5681 - 1.1930i)]); na=length(Ac)-1; syscont = tf(Bc,Ac); %Sistema en variables de estado Pss = ss(syscont); [a,b,c,d] = ssdata(Pss); % y su respuesta al escalón ... t = 0:0.01:10; u = ones(size(t)); yes = lsim(syscont,u,t); % Parámetros del regulador PID kp = 0.05; ki = 0; kd = 0; %inicializando iter = 5; j=zeros(1,iter); th=zeros(2,iter+1); th(:,1)=[kp;ki]; lambda=.0; Tfin = 30; T=.1; precision= .01; t = 0:precision:T; ref = 1; y = zeros(size(t)); ly = length(t); nd = Tfin/T; ed = zeros(nd,1); ud1 = zeros(nd,1); yd1 = zeros(nd,1); ud2 = zeros(nd,1); yd2 = zeros(nd,1); ud3 = zeros(nd,1); yd3 = zeros(nd,1); ym = zeros(nd,1); ydd = []; var =.001; gamma=.5;.
(53) am=.5; % Cálculo de La respuesesta del modelo for i = 3:nd ym(i) = am*ym(i-1)+ (1-am)*ref; end; for k = 1:iter % Experimento 1 x0= zeros(1,na); y = zeros(size(t)); yy = 0; uu = 0; int = 0; for i = 3:nd % Regulador yd1(i) = y(ly)+ var*randn; ed(i)=ref- yd1(i); int = int + ki * ed(i); der = kd * (yd1(i)-yd1(i-1)); ud1(i)=kp*(ed(i)+ int + der); % bloqueador de orden cero u = ud1(i) * ones(size(t)); % Sistema s=size(x0); [y, tt, x0] = lsim(Pss,u,t,x0(s(1),:)); yy = [yy ; y]; uu = [uu ; u']; end; % Experimento 2 x0= zeros(1,na); y = zeros(size(t)); yy = 0; uu = 0; int = 0; for i = 3:Tfin/T % Regulador yd2(i) = y(ly)+ var*randn; ed(i)=ref - yd1(i) - yd2(i); int = int + ki * ed(i); der = kd * (yd2(i)-yd2(i-1)); ud2(i)=kp*(ed(i)+ int + der); % bloqueador de orden cero u = ud2(i) * ones(size(t));.
(54) % Sistema s=size(x0); [y, tt, x0] = lsim(Pss,u,t,x0(s(1),:)); yy = [yy ; y]; uu = [uu ; u']; end; j(k)=(ym-yd1)'*(ym-yd1)+lambda* ud1'*ud1; dydkp=yd2/kp; dydki = zeros(nd,1); for i = 3:nd dydki(i) = 1/(1+ki)*dydki(i-1)+1/(1+ki)*yd2(i); end; dudkp=ud2/kp; dudki = zeros(nd,1); for i = 3:nd dudki(i) = 1/(1+ki)*dudki(i-1)+1/(1+ki)*ud2(i); end; dydp=[dydkp';dydki']; dudp=[dudkp';dudki']; yt=yd1-ym; djdp=(dydp*yt+lambda*dudp*ud1)/nd; kp=kp-gamma*djdp(1); ki=ki-gamma*djdp(2); th(:,k+1)=[kp;ki]; ydd=[ydd yd1]; end %graficado del proceso e(:,6)=[kp;ki] np=Bc dp=Ac nc=[kp ki] dc=[1 0] slc1=tf(np,dp) slcp=feedback(slc1,1) step(slcp) ncp=conv(np,nc) dcp=conv(dp,dc) slc2=tf(ncp,dcp) slcc=feedback(slc2,1) hold on figure(1) step(slcc).
(55)
Figure


+7



Documento similar
"No porque las dos, que vinieron de Valencia, no merecieran ese favor, pues eran entrambas de tan grande espíritu […] La razón porque no vió Coronas para ellas, sería
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
[r]
SVP, EXECUTIVE CREATIVE DIRECTOR JACK MORTON
Parece, por ejemplo, que actualmente el consejero más influyente en la White House Office con Clinton es el republicano David Gergen, Communications Director (encargado de la
En cuarto lugar, se establecen unos medios para la actuación de re- fuerzo de la Cohesión (conducción y coordinación de las políticas eco- nómicas nacionales, políticas y acciones
b) El Tribunal Constitucional se encuadra dentro de una organiza- ción jurídico constitucional que asume la supremacía de los dere- chos fundamentales y que reconoce la separación
