Fundamentos para el modelado dinámico de robot paralelo de tres grados de libertad
119
0
0
Texto completo
(2) 2. Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Fundamentos para el Modelado Dinámico de Robot Paralelo de Tres Grados de Libertad Autor: Yulien Morales Ginarte E-mail: [email protected] Tutor: MSc. Eduardo Izaguirre Castellanos E-mail: [email protected] Dpto. Automática y Sistemas Computacionales Facultad de Ingeniería Eléctrica. Santa Clara 2009 "Año del 50 aniversario del triunfo de la revolución".
(3) 3. Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. ¨ Un sutil pensamiento erróneo puede dar lugar a una indagación fructífera que revela verdades de gran valor.¨ Isaac Asimov.
(5) ii. DEDICATORIA. A mi hermano, mis padres, mis abuelos, por todo, su amor, dedicación, sacrificio… A mi Ini. A mis Amigos, mis verdaderos amigos..
(6) iii. AGRADECIMIENTOS Agradezco el apoyo fundamental que me brindaron todas aquellas personas, que por solidaridad y voluntad propia, terminaron incluyéndose en este Trabajo de Diploma. A mi tutor Eduardo Izaguirre Castellanos, por su esfuerzo, disposición, apoyo, los cuales fueron imprescindibles. A mis profesores. A Aleida, Jóse, Pablo José y los profesores de la Facultad de Mecánica, por su ayuda brindada. A Ana Rosa, Guillermo, Rolexis, mis abuelos a quines les debo todo; su obra ha sido recompensada. A mi familia; todos han puesto un granito de arena. A mis amigos, Jorge, Santana, Pablo, Alexei,, Raudel, incluyendo sus padres; su dedicación, ayuda, preocupación, me dio fuerzas. A mi Ini, que en tan poco tiempo ha hecho tanto. A Vilma, y su hermosa familia incluyendo a Zenia. A mis amigas Cristinita, Jessi, Pache, Daime y demas. A mis compañeros del aula Carrete, Pacheco, Dayton, Roly, Jorge, Victor y demas. A todos, muchas gracias “La suerte es el pretexto de los fracasados”.
(7) iv. TAREA TÉCNICA. ¾ Revisión bibliográfica relacionada con el tema del modelado dinámico de estructuras robóticas paralelas. ¾ Estudio de los fundamentos del modelado dinámico de sistemas multicuerpos y su importancia. ¾ Estudio de los procedimientos y métodos actuales para el modelado dinámico de robots paralelos. Características, ventajas y desventajas. 9 9 9 9. Método de Newton-Euler. Método de Euler-Langrange. Teoría de Screws Principio de Trabajo Virtual.. ¾ Descripción y estudio de las características dinámicas de la plataforma de simulación de tres grados de libertad accionada por cilindros neumáticos. 9 Descripción de los parámetros dinámicos de los cuerpos rígidos y eslabones que conforman la estructura robótica. 9 Definición de las consideraciones y simplificaciones para el modelado dinámico. ¾ Análisis de las ecuaciones cinemáticas de la plataforma de simulación de 3 grados de libertad. 9 Cinemática diferencial del robot paralelo. 9 Matriz Jacobiana. ¾ Estudio y planteamiento de las ecuaciones relacionadas con el equilibrios de fuerzas y momentos en la plataforma de 3 grados de libertad. ¾ Redacción del informe final de tesis.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN Realizar estudio de estrategias de control para cualquier proceso dado, requiere de disponer del modelo matemático que describa el comportamiento dinámico del sistema lo más representativamente posible. En el caso de sistemas robóticos el modelo dinámico adquiere notable importancia dado el efecto que tiene conocer el comportamiento de las fuerzas y pares que intervienen en el movimiento de la estructura robótica, dado que el conocimiento de las variables relacionadas con la velocidad y aceleración del efector final juega un importante rol en el diseño del regulador. En este trabajo de diploma se realiza el modelado desde el punto de vista dinámico de un robot de estructura paralela accionada por cilindros neumáticos que realiza las funciones de simulador de movimiento, en tal sentido se estudian los procedimientos y métodos actuales para el modelado dinámico de robots paralelos, sus características, ventajas y desventajas, para posteriormente llevar a cabo el modelado dinámico de la plataforma de simulación de tres grados de libertad objeto de estudio. Así también se analizan las relaciones entre las velocidades articulares y las del elemento terminal del robot en el denominado análisis cinemático diferencial, expresado mediante la matriz Jacobiana, donde se dan a conocer los diferentes tipos de configuraciones singularidades.. Posteriormente se plantearon los fundamentos para el modelado dinámico de la plataforma de simulación de 3 grados de libertad objeto de estudio, mediante la aplicación de las ecuaciones de Newton llevando a cabo una análisis por separado de las fuerzas que producen movimiento trasnacional de las fuerzas que producen movimiento rotacional sobre la plataforma móvil, pero de una manera simplificada, debido a la complejidad del mismo..
(9) vi. PRINSIPALES NOTACIONES A −1 AT act i Ai Ai j. Inversa de una matriz. Matriz traspuesta. Actuador i-esimo. Extremo inferior de la articulación i-esima conectada a la plataforma fija.. Bi cri C1 C2 C3 C4 CX. Extremo superior de la articulación i-esima conectada a la plataforma móvil. Cuerpo rígido i-esimo. Punto de la articulación rotacional del pistón 1. Punto de la articulación cardánica. Punto del Cuerpo Rígido 2 Punto de la articulación cilíndrica sobre la plataforma móvil. Matriz (n × n ) que considera los efectos de las aceleraciones centrifugas y de Coriolis en el espacio de tarea. Desplazamiento del pistón i-esimo.(mm). despi h Li n O O X ,Y ,Z. ef P. PX ',Y ', Z ' x. ρi βi δr δU θ ϕ ψ τ. Punto medio entre Ai y A j .. Altura. Desplazamiento inicial del pistón i-esimo. Número de actuadores o número de grados de libertad. Centro de coordenadas de plataforma fija. Sistema de referencia fijo O . Efector final. Centro de coordenadas de plataforma móvil. Sistema de referencia móvil P . Vector (n × 1) de las variables cartesianas o en el espacio de tarea. Angulo respecto al eje x, y, z del sistema de referencia fijo O en el espacio. [alpha] Angulo entre articulación i-esimo y base de la plataforma. [beta]. Desplazamiento virtual. [delta] Trabajo virtual. [delta] Rotación con respecto al eje x ' (ladeo). [theta] Rotación con respecto al eje y ' (cabeceo). [phi] Rotación con respecto al eje z ' (guiñada). [psi] Vector (n × 1) de los pares o fuerzas de los actuadores. [tau].
(10) vii. TABLA DE CONTENIDO. PENSAMIENTO ....................................................................................................................i DEDICATORIA................................................................................................................... ii AGRADECIMIENTOS ...................................................................................................... iii TAREA TÉCNICA ..............................................................................................................iv RESUMEN ............................................................................................................................v PRINSIPALES NOTACIONES .........................................................................................vi TABLA DE CONTENIDO ............................................................................................... vii INTRODUCCIÓN. ...............................................................................................................1 Estructura del trabajo de diploma. .................................................................................5 CAPÍTULO 1. 1.1. MARCO TEÓRICO .............................................................................6. Formulaciones clásicas del problema dinámico. ..............................................25. 1.1.1. Formulación de Newton-Euler. .................................................................26. 1.1.2. Formulación de Euler-Lagrange. ..............................................................27. 1.1.3. Ecuaciones de Gibbs-Appell ......................................................................31. 1.1.4. Teoría Screw. ...............................................................................................32. 1.1.5. Principio de Hamilton ................................................................................35. 1.1.6. Principio del Trabajo Virtual ....................................................................39. CAPÍTULO 2. 2.1. CINEMÁTICA DIFERENCIAL .......................................................50. Relaciones diferenciales ......................................................................................52.
(11) viii 2.2. Configuraciones singulares ................................................................................56. 2.3. Calculo de la Matriz Jacobiana del Robot........................................................59. CAPÍTULO 3.. MODELO DINÁMICO ......................................................................62. 3.1. Definición de ángulos de los pistones y cuerpos rígidos en el espacio. ...........67. 3.2. Calculo de las Ecuaciones del Modelo Dinámico. ............................................78. 3.3. Análisis Económico. ............................................................................................90. CONCLUSIONES Y RECOMENDACIONES................................................................92 Conclusiones ....................................................................................................................92 Recomendaciones ............................................................................................................93 REFERENCIAS BIBLIOGRÁFICAS ..............................................................................94 ANEXOS ..............................................................................................................................97 Anexo I. DESCRIPCIÓN Y PROPIEDADES DE LOS OBJETOS QUE. CONFORMAN LA PLATAFORMA ...........................................................................97 Anexo II Anexo III. PIEZAS DE LA PLATAFORMA Y ALGUNAS DIMENSIONES. ....100 PROGRAMA EN MATLAB PARA EL CALCULO DE LAS. ECUACIONES DINÁMICAS QUE RIGEN LA POSE DE LA PLATAFORMA .104.
(12) Introducción. 1. INTRODUCCIÓN.. La palabra "robot" viene del vocablo checo robota, "trabajo", especialmente los llamados "trabajadores alquilados" que vivieron en el Imperio Austrohúngaro hasta 1848. El término fue utilizado por primera vez por Karel Čapek (Tsai, 2000) en su obra teatral R.U.R. (Rossum's Universal Robots) escrita en colaboración con su hermano Josef en 1920. Hacia 1942, Isaac Asimov da una versión más humanizada a través de su conocida serie de relatos, en los que introduce por primera vez el término robótica con el sentido de disciplina científica encargada de construir y programar robots. Además, este autor plantea que las acciones que desarrolla un robot deben ser dirigidas por una serie de reglas morales, llamadas las Tres leyes de la robótica, posteriormente ampliadas a cuatro tras la introducción de la Ley Cero (Limón, 2006). Los robots en un principio comenzaron a emplearse para llevar a cabo tareas peligrosas, difíciles, repetitivas o tediosas para los humanos. Hoy en día prácticamente son empleados para realizar una amplia variedad de tareas, abarcando casi todas las esferas de la vida moderna (Sanz and Casado, 2005, Aracil et al., 2006). Entre ellas podemos mencionar limpieza de residuos tóxicos, exploración espacial, minería, búsqueda y rescate de personas y localización de minas terrestres, aplicaciones médicas (Merlet, 2006), simuladores de movimiento, simuladores de vuelo, posicionamiento, etc. Muchas grandes empresas, como Intel, Sony, General Motors, Dell, han implementado en sus líneas de producción unidades robóticas para desempeñar tareas que por lo general hubiesen desempeñado trabajadores en épocas anteriores. En la literatura, existen diferentes clasificaciones para los robots. Teniendo en cuenta su estructura cinemática, los mismos se pueden clasificar en: Robots Serie, Robots Paralelos e Híbridos. Los robots tipo serie están formados por una cadena cinemática abierta, con una estructura similar al brazo humano (antropomórficos), Figura 1(a). En cambio, los robots paralelos están formados por cadenas cinemáticas cerradas Figura 1(b). En el caso que.
(13) Introducción. 2. aparezca integrado en un mismo robot, ambos tipos de cadenas cinemáticas, se dice que éste es híbrido (Tsai, 2000, Zabalza and Ros, 2007).. (a). (b). Figura 1 (Spong, 2007): (a) Robot tipo serie. (b) Robot o manipulador tipo paralelo.. Robots Paralelos Desde sus inicios el hombre ha tenido la posibilidad de manipular objetos con un solo brazo estas se ven incrementadas cuando se utilizan los dos brazos simultáneamente. Un levantador de pesos, cuando utiliza los dos brazos, consigue marcas más importantes que la suma de las que conseguiría con cada una de sus brazos individualmente. Como tantos desarrollos tecnológicos, inspirados en la observación de las leyes de la naturaleza, las consideraciones anteriores son las que pueden conducir a concebir para los robots el uso de estructuras paralelas, alternativas de las tradicionales en serie, que, por esta cualidad, se denominan paralelos (Aracil et al., 2006, Sanz and Casado, 2005). En los últimos años, uno de los sistemas multicuerpo que ha recibido mayor atención por parte de los investigadores en el área, son los robots paralelos. Los robots paralelos son muy utilizados en la actualidad sobre todo en ciertas aplicaciones industriales, donde es requerido interactuar con grandes cargas. Este tipo de sistemas presenta ventajas importantes respecto a otros sistemas multicuerpo, por su mayor rigidez y relación de tamaño de sus componentes, lo cual le permite una mayor relación tamaño-carga de trabajo.
(14) Introducción. 3. (Merlet, 2006). La principal desventaja de los robots paralelos radica en que su configuración en lazo cerrado restringe el movimiento del sistema, lo cual dificulta la obtención sistemática de las ecuaciones que definen su comportamiento dinámico. Los trabajos sobre robots paralelos se han enfocado principalmente a la resolución del problema cinemático y relativamente pocos trabajos se enfocan en la dinámica de robots paralelos (Tsai, 2000). Según Merlet (Merlet, 2006), de manera general los robots paralelos los podemos definir como mecanismos de cadena cinemática cerrada cuyo efector final se une a la base por medio de varias cadenas cinemáticas independientes. Esta definición es muy abierta, e incluye robots con mecanismos redundantes de más actuadores que números de grados de libertad controlados del efector final, tales como manipuladores trabajando en cooperación. De esta forma solo nos ocuparemos principalmente de manipuladores donde al menos dos cadenas soportan el efector final y cada una de estas cadenas contiene por lo menos un actuador simple, además el número de actuadores es igual que el número de grados de libertad del robot, y la movilidad resulta cero cuando los actuadores son bloqueados. El estudio de este tipo de mecanismo tiene sus ventajas por las razones siguientes: . Un mínimo de dos cadenas permite distribuir la carga en dichas cadenas.. . El número de actuadores es mínimo.. . El número de sensores necesarios para el control de lazo-cerrado del mecanismo es mínimo.. . Cuando los actuadores se bloquean, el manipulador conserva su posición; ello constituye un aspecto importante de seguridad para ciertas aplicaciones, como por ejemplo la robótica médica.. Por tanto podemos definir que los robots paralelos están compuestos de un efector final con. n grados de libertad, unido a la base fija, por al menos dos cadenas cinemáticas independientes. El movimiento tiene lugar gracias a n actuadores simples (Merlet, 2006)..
(15) Introducción. 4. Por otra parte, según la terminología básica que aparece en el sitio web del Centro de Información. de. Mecanismos. Paralelos. (ParallelMIC). disponible. en. http://www.parallemic.org/Terminology/General.html, se define un mecanismo paralelo como un mecanismo de lazo cerrado en el cual el efector final (plataforma móvil) es conectado a la base por al menos dos cadenas cinemáticas independientes. También hace referencia a otros términos similares como: robot. paralelo, manipulador paralelo,. plataforma Stewart, plataforma Gough-Stewart, plataforma Gough, plataforma móvil, mecanismo articulación paralela, mecanismo lazo cerrado, Mecanismo Cinemática Paralela, hexapod.. Dinámica y cinemática. La cinemática se ocupa de los aspectos geométricos y temporales del movimiento de un robot sin atender a las fuerzas y/o torques que lo producen. Entre dichos aspectos se encuentran la posición, velocidad y aceleración. En un sistema robótico las variables de las articulaciones están relacionadas con la posición y orientación del elemento terminal mediante las limitantes impuestas por ellas mismas. Estas relaciones cinemáticas son el principal interés en el estudio de un conjunto de aspectos importantes en la robótica como son el espacio de trabajo, seguimiento de trayectorias, configuraciones singulares, estudio de las propiedades de la Jacobiana, etc.(Limón, 2006) La dinámica se ocupa del estudio de las torques y/o fuerzas necesarias para causar el movimiento del robot. Las fuerzas y/o pares deben ser aplicados convenientemente en las articulaciones activas para producir los movimientos deseados. Sin embargo, estas relaciones no sólo dependen de atributos espaciales y temporales, sino también de la masa e inercia de los eslabones, la carga soportada por el robot y otras fuerzas externas, como por ejemplo la fricción (Tsai, 2000). En la robótica, el estudio de los aspectos relacionados con el campo de la mecánica juegan un rol fundamental, pues sus conceptos, postulados y formulaciones se emplean entre otras cosas como herramientas para obtener el modelo matemático del sistema, de manera que dichas ecuaciones permitan llevar a cabo los procedimientos de diseño mecánico,.
(16) Introducción. 5. simulación y algoritmos de control del robot (Filho and Cabral, 2006, Bruyninckx, 2005). Sin embargo, según la terminología manejada en dicho ámbito el término dinámica corresponde al concepto denotado como cinética en la mecánica vectorial (Beer et al., 2004). De esta forma, el modelo de un sistema considera tanto las relaciones cinemáticas como dinámicas.. Estructura del trabajo de diploma. Este trabajo se realiza el estudio dinámico de un robot de tres grados de libertad que se emplea como simulador de movimiento. Se obtiene el modelo dinámico mediante la aplicación de las ecuaciones de Newton llevando a cabo un análisis por separado de las fuerzas que producen movimiento trasnacional de las fuerzas que producen movimiento rotacional sobre la plataforma móvil, pero de una manera simplificada, debido a la complejidad del mismo. Como Objetivo General se ha propuesto: ¾ Estudio de los fundamentos del modelado dinámico en robots paralelos; aplicación. a la plataforma de simulación de tres grados de libertad. El trabajo de tesis está organizado en tres capítulos. En el capítulo 1 se da a conocer la importancia del modelado dinámico, enfocándose en las características dinámicas de una plataforma de simulación de tres grados de libertad accionada por cilindros neumáticos, describe los parámetros dinámicos de los cuerpos rígidos y eslabones que conforman la estructura robótica, identifica los parámetros dinámicos a considerar. Se analizan varias formulaciones clásicas para la realización del modelado dinámico del manipulador. En el capitulo 2 se realiza el análisis con la cinemática diferencial relacionando las velocidades y aceleraciones entre la plataforma y las articulaciones actuadas, se calcula la matriz Jacobiana y se analizan sus propiedades fundamentales. Por ultimo en el capitulo 3 se describen las ecuaciones que rigen el comportamiento del robot desde el punto de vista dinámico, realizándose dicho análisis en una primera parte de manera estática y finalmente incorporando los aspectos dinámicos..
(17) Capítulo 1 Marco Teórico. 6. CAPÍTULO 1. MARCO TEÓRICO. Los parámetros dinámicos vienen definidos entre otros aspectos por las propiedades de masa de las articulaciones, cuerpos rígidos y eslabones que constituyen el sistema robótico, a partir de lo cual se calculan las fuerzas y momentos resultantes, fuerzas y momentos de inercia, fuerzas gravitacionales y de Coriolis, etc, generalmente ejercidas sobre los centros de gravedad de los cuerpos involucrados en el movimiento. Los mismos constituyen el conjunto de parámetros necesarios a para la resolución de la dinámica tanto inversa como directa. A pesar que los estudios dinámicos de sistemas multicuerpos viene siendo estudiado desde mediados de los 80, la necesidad de modelos más precisos, entre otras cosas por la demanda en los procesos industriales de robots operando a mayores velocidades, y cada vez más exigentes prestaciones, hacen que este tema continúe abierto y sea una de las áreas considerada dentro de las principales perspectivas de investigación en el campo de la dinámica de sistemas multicuerpos.. Este capítulo está dedicado principalmente al estudio de los principales aspectos que se deben tener en cuenta en el análisis dinámico de estructuras paralelas, análisis de fuerzas y momentos, así como el estudio de las propiedades de masa, incursionando por los significados conceptuales de trabajo y energía, puesto que algunas de las formulaciones empleadas en la literatura se basan en estos conceptos. Por otro lado se dan a conocer las formulaciones clásicas más importantes relacionadas con el modelo dinámico de estructuras paralelas, sus características, ventajas y desventajas principales. Finalmente se trata de manera especial el modelado dinámico basado en el Principio del Trabajo Virtual ya que es reconocido en la literatura consultada como uno de los más efectivos en lo que a costo computacional se refiere (Tsai, 2000, Li and Xu, 2009) y puesto que aunque no se llegó a concluir el modelo se dejan fundamentadas las ecuaciones del mismo, aplicadas al simulador de movimiento de tres grados de libertad objeto de estudio. ..
(18) Capítulo 1 Marco Teórico. 7. Importancia del Modelo Dinámico. La exactitud del elemento terminal es uno de los aspectos más importantes a abordar en los robots paralelos, sobre todo en las tareas de ensamblaje y aplicaciones medicas o tareas que implican contacto entre robot y la superficie de trabajo, también donde es crucial la ejecución rápida, como las operaciones de manipulación, que necesitan de un robot rápido (Shyu and Gill, 1996), y donde la amplitud de movimiento por lo general es pequeña. El robot para ser útil debe ser controlado; es decir, debe presentar un comportamiento acorde a una respuesta deseada. Para ello es necesario previamente disponer de un modelo matemático del comportamiento del sistema a partir del cual generar las acciones de control requeridas. En el caso de sistemas robóticos el modelo dinámico adquiere notable importancia dado el efecto que tiene conocer el comportamiento de las fuerzas y/o pares que intervienen en el movimiento de la estructura robótica, ya que el conocimiento de las variables relacionadas con la velocidad y aceleración del efector final define el diseño del regulador. Para ello es preciso disponer de un modelo del sistema que describa el comportamiento del mismo lo más aproximado posible al sistema físico real, lo cual resulta muy importante para establecer estrategias de control para el sistema; es significativo evaluar a partir de diseños preliminares, el funcionamiento del robot, especialmente sus características dinámicas, es ahí donde las ecuaciones que rigen el comportamiento dinámico del robot juegan un rol importante (Limón, 2006, Sharma and Ogot, 1997). El desarrollo de productos de alta calidad requiere de un perfeccionamiento en el marco que integra el apoyo matemático del sistema mecánico, el modelado y la simulación son ventajas para luego poder verificar el diseño con mucho menos esfuerzo y tiempo (LI et al., 2007)..
(19) Capítulo 1 Marco Teórico. 8. Análisis Dinámico El modelo dinámico establece relaciones matemáticas entre las coordenadas cartesianas (coordenadas del efector final), sus derivadas (velocidad y aceleración), las fuerzas y/o pares aplicados a las articulaciones y los parámetros del robot, tales como: masas de los eslabones, inercias, fricción, etc (Yen and Lai, 2009). El modelo matemático del robot implica el análisis del mecanismo: su estructura, geometría, cinemática y dinámica, así como la obtención de ecuaciones que representen la dinámica del sistema con suficiente precisión de acuerdo a la aplicación. Mientras la cinemática abarca el análisis del movimiento, la dinámica se encarga de la relación entre éste y las fuerzas que lo producen (Tsai, 2000). El análisis de la dinámica de un robot de arquitectura paralela es siempre difícil comparado con su homólogo serie, debido la existencia de varias cadenas cinemáticas conectadas a la plataforma móvil (Filho and Cabral, 2006). Primeramente abordaremos el concepto de fuerza, puesto que en capítulos posteriores se hace un análisis de todas las fuerzas que actúan en la plataforma, incluyendo su peso, y demás propiedades de masa, así mismo se analizan los momentos que provocan las diferentes fuerzas, momentos de inercia. En este capitulo también se abordan entre otros los conceptos de fuerza, peso, momento de una fuerza, fricción, etc y también los relacionados con trabajo y energía como explicábamos anteriormente. .. Fuerza La dinámica es la rama de la física y de la ingeniería que se ocupa del movimiento de los cuerpos y de las fuerzas que provocan dicho movimiento. Cuando empujamos un cuerpo o tiramos de él, decimos que ejercemos una fuerza sobre el mismo. Las fuerzas pueden ser ejercidas también por objetos inanimados. Ejemplo Un resorte tenso ejerce fuerza sobre los.
(20) Capítulo 1 Marco Teórico. 9. cuerpos atados a sus extremos, el aire comprimido ejerce fuerza sobre las paredes del recipiente que lo contiene, etc. (Sears, 1972) La fuerza se puede definir como una magnitud vectorial capaz de deformar los cuerpos (efecto estático), modificar su velocidad o vencer su inercia y ponerlos en movimiento si estaban inmóviles. Una fuerza representa la acción de una partícula o cuerpo rígido sobre otro. Ésta puede ser ejercida debido al contacto entre ellos o a distancia, como es el caso de la fuerza de gravedad y las fuerzas electromagnéticas. Una fuerza es una cantidad vectorial, caracterizada por un punto de aplicación, magnitud, dirección y sentido (Limón, 2006). Las fuerzas que actúan sobre un cuerpo pueden ser clasificadas en dos grupos (Beer et al., 2005): 1.. Fuerzas externas. Representan la acción de otras partículas o cuerpos sobre. la partícula o cuerpo analizado. Son enteramente responsables del comportamiento del cuerpo; es decir, su condición de equilibrio o movimiento. En nuestro caso particular obviamos cualquier fuerza externa como viento, empuje o agarre a tensores flexibles. 2.. Fuerzas internas. Son las que mantienen unidas las partículas de un cuerpo.. En caso de un cuerpo rígido la sumatoria total de las fuerzas internas es cero. Algunas de las fuerzas externas más comunes que se presentan en el análisis dinámico son las reacciones en las conexiones entre los cuerpos, la fuerza de gravedad y la fricción.. Fuerza de gravedad. Peso Dos partículas cualesquiera presentan una atracción mutua cuya fuerza, según la ley de gravitación de Newton, está dada por la siguiente expresión matemática (Sears, 1972):. F =G. m1 m2 r2. (1-1).
(21) Capítulo 1 Marco Teórico. 10. Donde F representa la fuerza de atracción entre dos partículas de masa m1 y m2 separadas una distancia r. El término G representa la constante universal de gravitación: G = 66.73 ⋅ 10 −12 m. 3. kg ⋅ s 2. (1-2). Sin embargo, en el caso de una partícula ubicada en o cerca de la superficie de la Tierra, la única fuerza gravitatoria que tiene magnitud considerable es aquella existente entre la Tierra y la partícula, denominándose fuerza de gravedad en este caso. A esta fuerza comúnmente se le llama peso (W). El peso de un cuerpo no es una cantidad absoluta ya que es medido en un campo gravitatorio, además se sabe que la Tierra no es exactamente esférica, y por consiguiente su magnitud depende de dónde se efectúe la medición. No obstante, para la mayoría de los cálculos se considera una ubicación estándar. Así, conociendo la masa de la tierra mT y su radio rT, se introduce la constante g denominada como aceleración de la gravedad por comparación de unidades:. g=. GmT rT2. g ≈ 9.81 m. s2. (1-3). Así, denominando a la masa de la partícula o cuerpo rígido de interés como m, su peso se obtiene:. W = mg. (1-4). Fricción Cuando dos superficies entran en contacto siempre aparecen fuerzas tangenciales o de fricción que se oponen al deslizamiento entre ambas superficies. La magnitud de estas fuerzas depende básicamente de la rugosidad de las superficies en cuestión, pues a nivel microscópico ninguna superficie es lisa, así, cuando una superficie se desliza sobre la otra.
(22) Capítulo 1 Marco Teórico. 11. aparecen fuerzas de contacto que se oponen a dicho deslizamiento (Limón, 2006). En nuestro estudio en particular las fuerzas de fricción se desprecian dado su ínfimo valor con respecto a las demás fuerzas involucradas en el movimiento.. Momento de una fuerza. El efecto que produce una fuerza sobre un cuerpo rígido depende de su punto de aplicación, razón por la cual se introduce el concepto de momento de una fuerza (Beer et al., 2005): Lo más cómodo es elegir como punto de referencia aquel en el cual el eje corta al plano de las fuerzas. La distancia desde este punto a la línea de acción de una fuerza se denomina brazo de la fuerza o brazo del momento de la fuerza respecto al eje. El momento de una fuerza MO con respecto a un punto O se define vectorialmente como el producto vectorial (denotado como x ) del vector r que indica el punto de aplicación de la fuerza por el vector de dicha fuerza F (Sears, 1972): MO = r × F. (1-5). De acuerdo a esta definición la dirección de dicho vector se orienta perpendicularmente al plano que forman los vectores r y F, siendo su magnitud el producto de la fuerza y la distancia perpendicular d del punto O a la línea de acción de la fuerza (Figura 1.1) (Beer et al., 2005):. M O = rF senθ M O = Fd. (1-6).
(23) Capítulo 1 Marco Teórico. 12. Figura 1.1 Momentos de una fuerza (Beer et al., 2005).. El momento de una fuerza mide la tendencia de la fuerza F para rotar el cuerpo rígido alrededor de un eje dirigido a lo largo del vector MO en el sentido indicado por dicho vector de acuerdo a la regla de la mano derecha. Así mismo, el sentido de rotación también puede ser determinado a partir del sentido de la fuerza F en relación al punto O.. Masa. Las propiedades de masa del robot son importantes para el análisis dinámico, sus efectos (por ejemplo la fuerza de Coriolis) provocan disturbios en el comportamiento del sistema, los cuales hay que considerar en el análisis (Merlet, 2006). La masa se refiere a una propiedad que indica la cantidad de materia de un cuerpo. Sin embargo, ésta puede estar distribuida arbitrariamente siendo necesario expresar adecuadamente dicha distribución, pues afecta directamente el movimiento del cuerpo. Es por ello que se generalmente se consideran los conceptos de Centro de Masa y Momento de Inercia del robot y sus eslabones.. Centro de Masa. Anteriormente se presentaba la manera de obtener la fuerza de gravedad ejercida por la Tierra sobre una partícula; sin embargo, un cuerpo se encuentra formado por una infinidad de partículas de tal forma que el efecto que la Tierra ejerce sobre él, resulta en una gran cantidad de pequeñas fuerzas distribuidas y que pueden ser reemplazadas por una fuerza.
(24) Capítulo 1 Marco Teórico. 13. resultante aplicada en un punto del cuerpo denominado centro de masa o centro de gravedad, de tal forma que produzca el mismo momento con respecto a un punto arbitrario que el de las fuerzas distribuidas. Así, para la posición del centro de gravedad rG respecto a un sistema coordenado (Limón, 2006):. rG =. 1 rdW W∫. (1-7). Sustituyendo la ecuación (1-4) en (1-7). rG =. 1 rdm m∫. (1-8). Sustituyendo en la ecuación (1-8) quedando la masa expresada en términos del volumen V del cuerpo y su densidad ρ.. rG =. 1 rρdV m∫. (1-9). Momento de inercia El momento de inercia presenta una medida de la distribución de la masa en un cuerpo con respecto a un determinado eje. Se define el Momento de Inercia de cada una de las partículas Ii que conforman a un cuerpo como el producto de la masa de la partícula (mi) por la distancia entre ésta y el eje considerado ri elevada al cuadrado (Beer et al., 2005): I i = ri 2 mi. (1-10).
(25) Capítulo 1 Marco Teórico. 14. Si cada partícula se considera como un elemento diferencial y se realiza la integración se obtiene el momento de inercia de masa del cuerpo con respecto a dicho eje: I = ∫ r 2 dm. (1-11). Este momento de inercia también puede quedar expresado en función de la masa total del cuerpo si se define un parámetro denominado como radio de giro k, el cual representa una distancia con respecto al eje a la cual se debería concentrar toda la masa del cuerpo para producir el mismo momento de inercia:. I = k 2m. (1-12). Considerando un sistema coordenado unido a dicho cuerpo, es posible obtener el momento de inercia con respecto a cada uno de sus ejes si se expresa el radio r de la ecuación (1-11) en función de las coordenadas cartesianas mediante el teorema de Pitágoras (Figura 1.2). Así:. (. ). I xx = ∫ y 2 + z 2 dm,. (. ). I yy = ∫ z 2 + x 2 dm,. (. ). I zz = ∫ x 2 + y 2 dm. (1-13). Sin embargo, estos no serán suficientes para representar adecuadamente la distribución de masa en el cuerpo si el sistema coordenado unido a él no es colocado de tal forma que la masa se encuentre distribuida de manera simétrica; entonces es necesario determinar tres cantidades adicionales llamadas productos de inercia (Beer et al., 2005) I xy = I yx = ∫ ( xy ) dm,. I yz = I zy = ∫ ( yz )dm ,. I xz = I zx = ∫ ( xz )dm. (1-14).
(26) Capítulo 1 Marco Teórico. 15. Figura 1.2 Notación para obtener los momentos de inercia respecto a un sistema. coordenado (Beer et al., 2005) Así, las propiedades inerciales de un cuerpo pueden quedar completamente caracterizadas por nueve términos, seis de los cuales son independientes entre sí. Estos se ordenan en forma de arreglo denominándose a la matriz resultante como el tensor de inercia I, definido a continuación: ⎡ I xx ⎢ I = ⎢− I yx ⎢ − I zx ⎣. − I xy I yy − I zy. − I xz ⎤ ⎥ − I yz ⎥ I zz ⎥⎦. (1-15). Si un plano ortogonal del sistema coordenado representa un plano de simetría, los productos de inercia que tengan por subíndice el eje perpendicular a dicho plano valen automáticamente cero, requiriéndose sólo dos planos de simetría para que los tres productos de inercia se anulen y el tensor de inercia quede como matriz diagonal. En dicho caso se denomina a los ejes del sistema coordenado como ejes principales de inercia, pudiendo ser cualquier punto elegido como su origen. Cuando los momentos y productos de inercia con respecto a un sistema coordenado cuyo origen sea el centro de masa del cuerpo son conocidos, entonces es posible determinar un nuevo conjunto de momentos y productos de inercia con respecto a cualquier otro sistema coordenado que presente la misma orientación, mediante el teorema de ejes y planos (Figura 1.3). Así (Beer et al., 2004):.
(27) Capítulo 1 Marco Teórico. 16. ( = (I ) + m(z = (I ) + m(x. I xx = (I x ' x ' )G + m y G2 + z G2 I yy I zz. y'y' G. 2 G. +x. z 'z ' G. 2 G. + y G2. 2 G. ) ) ). I xy = (I x ' y ' )G + m( xG y G ). I yz = (I y ' z ' )G + m( y G z G ) I xz = (I x ' z ' )G + m( xG z G ). (1-16). Figura 1.3 Teorema de ejes y planos paralelos (Beer et al., 2005). Generalizando las ecuaciones reportadas en (1-15) para el tensor de inercia: ⎡ I xx ⎢ ⎢− I yx ⎢ − I zx ⎣. − I xy I yy − I zy. − I xz ⎤ ⎡ (I x ' x ' )G ⎥ ⎢ − I yz ⎥ = ⎢ − (I y ' x ' )G I zz ⎥⎦ ⎢⎣− (I z ' x ' )G. − (I x ' y ' )G. ⎡ y G2 + z G2 ⎢ I = I G + m ⎢ − xG y G ⎢ − xG z G ⎣. − xG y G. (I ) − (I ). y'y' G z'y' G. z +x − yG z G 2 G. 2 G. ⎡ y G2 + z G2 − (I x ' z ' )G ⎤ ⎥ ⎢ − (I y ' x ' )G ⎥ + m ⎢ − xG y G (I z 'z ' )G ⎥⎦ ⎢⎣ − xG z G. − xG z G ⎤ ⎥ − yG zG ⎥ xG2 + y G2 ⎥⎦. − xG y G z +x − yG z G 2 G. 2 G. − xG z G ⎤ ⎥ − yG z G ⎥ xG2 + y G2 ⎥⎦. (1-17). Leyes del movimiento de Newton. En 1686 por primera vez, de un modo preciso, Isaac Newton (1643-1727) presentó en “Philosophiæ Naturalis Principia Mathematica” (Los Fundamentos Matemáticos de la.
(28) Capítulo 1 Marco Teórico. 17. Ciencia de la Naturaleza) las tres leyes básicas que rigen el movimiento de una partícula (Sears, 1972). Estas tres leyes del movimiento pueden ser enunciadas como siguen: 1. Una partícula originalmente en reposo, o moviéndose en línea recta con velocidad constante, permanecerá en ese estado siempre que no esté sometida a fuerzas desbalanceadas; es decir, siempre que la fuerza resultante sobre ella sea cero. 2. Una partícula sobre la que actúa una fuerza resultante (F) experimenta una aceleración (a) que tiene la misma dirección que la fuerza y una magnitud que es proporcional a ella. 3. Las fuerzas mutuas de acción y reacción entre dos partículas son iguales, opuestas y colineales. La segunda ley de Newton puede expresarse matemáticamente de la siguiente manera: F∝a. (1-18). La constante de proporcionalidad necesaria para formular la expresión anterior en forma de ecuación se denomina masa (m), la cual representa la resistencia de un cuerpo para cambiar la magnitud y/o dirección de su velocidad. Así (Beer et al., 2005): F = ma. (1-19). Ecuaciones de movimiento para un cuerpo rígido. Mientras que una partícula sólo presenta movimiento traslacional producido por la fuerza neta aplicada a ella, un cuerpo rígido puede presentar tanto movimiento traslacional como rotacional, siendo necesario analizar no sólo los efectos producidos por la fuerza neta.
(29) Capítulo 1 Marco Teórico. 18. aplicada, sino también por el momento neto aplicado a dicho cuerpo (Beer et al., 2005). Para este análisis se considera la figura 1.4. Figura 1.4 Dinámica de un cuerpo rígido (Beer et al., 2005).. Un cuerpo rígido se encuentra formado por una infinidad de partículas, siendo necesario extender la ecuación de movimiento para poder aplicarla. Para ello debe sumarse vectorialmente esta ecuación aplicada a cada partícula, estando cada una sometida a una fuerza resultante interna (fi) y una externa (Fi); sin embargo, la suma de las fuerzas resultantes internas es igual a cero, ya que todas ellas ocurren entre las partículas del cuerpo en pares iguales colineales pero opuestos. Así:. ∑F + ∑f i. i. = ∑ mi a i. (1-20). ∑F = ∑m a i. (1-21). i i. La ecuación (1-21) puede expresarse de manera diferente si se considera cada partícula como un elemento diferencial y se aplica la definición del centro de masa presentada en la ecuación (1-8) donde aG sería la aceleración para ese centro de masa (Beer et al., 2004). d2 d 2r F = ∫ 2 dm = 2 dt dt F = ma G. (. ). d 2 rG d2 ∫ rdm = dt 2 (mrG ) = m dt 2. (1-22). De esta manera el centro de masa de un determinado cuerpo representa un punto específico que caracteriza su movimiento de traslación como si toda su masa se concentrara en una.
(30) Capítulo 1 Marco Teórico. 19. partícula ubicada en dicho punto, lo cual permite en algunos casos considerar el movimiento de todo un cuerpo como el de una partícula. La ecuación (1-22) puede ser rescrita como: F − ma G = 0. (1-23). Representando el segundo término de la anterior ecuación una fuerza denominada como inercial, creándose así un equilibrio dinámico. A esto se le conoce como el principio D’Alembert. Para analizar los efectos producidos por los momentos aplicados al cuerpo respecto a un punto P en el espacio se hace producto vectorial (también conocido como producto cruz) a la izquierda de ambos lados de la ecuación (1-20) con un vector ri que se dirige desde el punto P hacia cada partícula. ∑r × F + ∑r × f = ∑r × m a i. i. i. i. i. i. i. (1-24). Luego de una serie de cálculos aplicando identidades (Limón, 2006) llegamos a la ecuación que relaciona el momento resultante aplicado al punto P con la aceleración lineal de este punto aP y el momento de inercia IP con respecto a él, sin embargo la aceleración característica del cuerpo es la del centro de gravedad siendo necesario manipular aun más dicha relación. M P = mrG × a P + I P α + ω × I P ω. (1-25). Cuando expresamos la ecuación (1-25) en función del centro de gravedad del cuerpo se hace el uso del teorema de los ejes y planos paralelos para el tensor de inercia descrito en la (1-17), desarrollando uno a uno los términos involucrados, el momento resultante con respecto al punto P equivale al momento generado por la fuerza inercial con respecto a este.
(31) Capítulo 1 Marco Teórico. 20. punto más dos términos dependientes del movimiento angular, donde el tensor de inercia representa la resistencia de un cuerpo para cambiar su velocidad angular, de la misma forma en que la masa lo hace en la velocidad lineal. La ecuación (1-25) se le conoce como la ecuación de Euler y junto con la (1-22) describen la rotación y traslación de un cuerpo sometido a fuerzas y/o pares externos, así mismo esta ecuación puede expresarse de manera similar a como se hizo en la (1-23), para dar lugar al equivalente rotacional del principio D’Alembert: M P − (rG × ma G + I G α + ω × I P ω ) = 0. (1-26). Trabajo y Energía Una fuerza F efectúa trabajo sobre un cuerpo (o partícula) cuando éste experimenta desplazamiento en la dirección de la fuerza. Así, si se considera un desplazamiento diferencial dr recorrido por él, el trabajo U efectuado por la fuerza se expresa como (Beer et al., 2005): r2. U1−2 = ∫ F ⋅ dr r1. (1-27). O de manera alternativa, si el desplazamiento diferencial en dirección de la fuerza se representa de manera escalar como ds, es posible expresar la ecuación como: s2. U 1− 2 = ∫ Fds s1. (1-28). Si el desplazamiento del cuerpo ocurre en la dirección de la fuerza entonces el trabajo efectuado es positivo; en cambio, si ocurre en el sentido opuesto entonces es negativo. Pero si la fuerza actúa perpendicular al desplazamiento, entonces dicha fuerza no trabaja..
(32) Capítulo 1 Marco Teórico. 21. Cuando el trabajo realizado por una fuerza al mover un cuerpo de un punto a otro es independiente de su trayectoria, entonces esta fuerza se denomina como conservativa. El peso y la fuerza de un resorte son dos ejemplos de fuerzas conservativas encontradas a menudo en mecánica. En caso contrario, la fuerza se denomina como no conservativa. Así mismo, un par también puede efectuar trabajo sobre un cuerpo. Recordando que el momento de un par es un vector libre, el eje de rotación puede ser colocado en medio del par de fuerzas equivalentes de tal forma que la distancia entre cada fuerza y el eje de rotación sea ½ r. De esta forma, dos partículas desplazadas por dichas fuerzas recorren un diferencial de arco de magnitud ½ r dθ. Por consiguiente, el trabajo realizado es: θ2. θ2. U 1−2 = 2 ∫ F ( 12 r dθ ) = ∫ (Fr )dθ θ1. θ1. θ2. = ∫ Mdθ θ1. (1-29). Y de igual forma, si el cuerpo rota en el sentido del momento del par aplicado, el trabajo realizado es positivo; en caso contrario es negativo. Si no rota no se efectúa trabajo alguno (Beer et al., 2005). Haciendo uso de la segunda ley de Newton. F = m⋅a. Haciendo los cálculos correspondientes:. (1-30).
(33) Capítulo 1 Marco Teórico. 22. dv ⎞ ⎛ ⎜ m ⋅ ⎟ ds dt ⎠ ⎝ s2 ⎛ dv ds ⎞ = ∫ ⎜m ⋅ ⎟ ds s1 ds dt ⎠ ⎝. U 1− 2 =. ∫. s2. s1. =. ∫. s2. =. ∫. v2. s1. v1. dv ⎞ ⎛ ⋅ v ⎟ ds ⎜m ⋅ ds ⎠ ⎝ mvdv. (1-31). Igualando las ecuaciones resultantes:. ∫. s2. s1. v2. F ⋅ ds = ∫ mvdv v1. (1-32). Integrando el miembro derecho de la ecuación (1.32), tenemos:. ∫. s2. s1. 1 2. F ⋅ ds = 12 mv22 − 12 mv12 s2. mv12 + ∫ F ⋅ ds = 12 mv22 s1. (1-33). Esta ecuación representa el principio del trabajo y la energía para una partícula, donde los términos. 1 2. mv12 y. 1 2. mv 22 definen la energía cinética inicial T y final T respectivamente del 1 2. trabajo efectuado sobre ella U1-2 (Beer et al., 2004): T1 + U 1− 2 = T2. (1-34). El principio del trabajo y la energía puede ser ampliado para un cuerpo rígido si éste se considera como formado por infinidad de partículas. Así, la energía cinética del cuerpo corresponde a la suma de la energía cinética de cada partícula:. T = ∑ Ti = ∑ 12 mi vi2. (1-35).
(34) Capítulo 1 Marco Teórico. 23. La velocidad de cada partícula puede ser relacionada con la del centro de gravedad vG mediante la correspondiente relación cinemática si se define un vector ri que va del centro de gravedad a cada partícula: 1 2. mi vi2 = 12 mi (v i ⋅ v i ). (1-36). Para. v i = v G + ω × ri. (1-37). Sustituyendo (1-37) en (1-36):. 1 2 1 2. mi vi2 = 12 mi ([ v G + ω × ri ] ⋅ [ v G + ω × ri ]). (. ). mi vi2 = 12 mi v G2 + 2 v G ⋅ (ω × ri ) + (ω × ri ) ⋅ (ω × ri ). (1-38). Desarrollando el último término (producto de matrices) del miembro derecho (Limón, 2006):. ⎡riy2 + riz2 (ω × ri ) ⋅ (ω × ri ) = ω ⋅ ⎢⎢ − rix riy ⎢ − rix riz ⎣. − rix riy r +r − riy riz 2 iz. 2 ix. − rix riz ⎤ ⎥ − riy riz ⎥ω rix2 + riy2 ⎥⎦. (1-39). Integrando la expresión de energía cinética: T=. 1 2. ∫v. 2 i. dm. ⎛ ⎡riy2 + riz2 − rix riy ⎜ ⎢ T = 12 ∫ ⎜ v G2 + 2 v G ⋅ (ω × ri ) + ω ⋅ ⎢ − rix riy riz2 + rix2 ⎜⎜ ⎢ − rix riz − riy riz ⎣ ⎝ ⎛ ⎡riy2 + riz2 ⎜ ⎢ T = 12 ∫ dm v G2 + v G ⋅ ω × ∫ rdm + 12 ω ⋅ ⎜ ∫ ⎢ − rix riy ⎜⎜ ⎢ ⎝ ⎣ − rix riz. ( ). (. ). − rix riz ⎤ ⎞⎟ ⎥ − riy riz ⎥ω ⎟ ⎟ rix2 + riy2 ⎥⎦ ⎟⎠ − rix riy riz2 + rix2 − riy riz. − rix riz ⎤ ⎞⎟ ⎥ − riy riz ⎥dm ⎟ω ⎟ rix2 + riy2 ⎥⎦ ⎟⎠.
(35) Capítulo 1 Marco Teórico. 24. T = 12 mv G2 + v G ⋅ (ω × mrG ) + 12 ω ⋅ I G ω. (1-40). Sin embargo, al tomar para la relación cinemática de velocidad como punto base el centro de gravedad G, el vector rG que posiciona a dicho centro de gravedad con respecto al punto base es cero. De esta forma se obtiene la expresión buscada para la energía cinética de un cuerpo rígido: T = 12 mv G2 + 12 ω ⋅ I G ω. (1-41). Es decir, que la energía cinética posee una componente traslacional y otra rotatoria. Si se consideran varios cuerpos, entonces la energía cinética total del sistema equivale a la suma de la energía cinética traslacional y rotatoria individual de cada uno. Así, si un cuerpo o sistema de cuerpos posee una energía cinética inicial y se realiza trabajo sobre él, entonces la energía cinética del sistema cambia según el principio del trabajo y la energía, ocurriendo así un balance de energía (Beer et al., 2004):. ∑ T + ∑U 1. 1− 2. =∑ T2. (1-42). La energía puede ser definida como la capacidad de efectuar un trabajo y en general pueden ser definidos varios tipos de energía, siendo los más importantes en el análisis mecánico la energía cinética y potencial. Cuando la energía proviene del movimiento se denomina energía cinética, pero si proviene de la posición con respecto a un plano de referencia en presencia de fuerzas conservativas, se denomina energía potencial. Así, la energía potencial V puede ser gravitatoria VG y/o elástica Ve, dependiendo de la fuerza conservativa presente, en nuestro caso de estudio la energía elástica se desprecia ya que los cuerpos rígidos pueden soportar la carga sin deformarse. Denotando como yG la posición del centro de gravedad del objeto sobre el plano de referencia y W el peso, la energía potencial se puede definir como:.
(36) Capítulo 1 Marco Teórico. 25. VG = WyG. (1-43). Entonces, cuando sólo fuerzas conservativas son aplicadas al cuerpo se dice que la energía mecánica del sistema se conserva, pudiéndose expresar la ecuación (Beer et al., 2004):. ∑ T + ∑ V =∑ T + ∑ V 1. 1.1. 1. 2. 2. (1-44). Formulaciones clásicas del problema dinámico.. Se emplean varios procedimientos para describir el problema dinámico, cada método presenta sus propias ventajas y desventajas. Las formulaciones clásicas para la realización del modelado dinámico son (Diaz et al., 2007, Limón, 2006): . Método de Newton-Euler.. . Método de Euler-Lagrange.. . Método de Ecuaciones de Gibbs-Appell.. . Teoría Screws.. . Principio de Hamilton.. . Principio del Trabajo Virtual.. Hay que tener en cuenta que las ecuaciones de movimiento obtenidas con estas formulaciones son equivalentes, en el sentido que describen la dinámica del robot, pero con las características de que cada una de ellas presenta sus propias particularidades que la hacen más apropiada de acuerdo a la aplicación, tipo de robot, estrategias de control a implementar, podemos concluir que no hay ningun problema a la hora de modelar los robots paralelos (Zhao and Gao, 2009)..
(37) Capítulo 1 Marco Teórico. 1.1.1. 26. Formulación de Newton-Euler.. Este método consiste en definir las ecuaciones de movimiento para cada eslabón del robot y a partir de ahí efectuar el análisis dinámico, generándose un sistema de ecuaciones en función tanto de las fuerzas y/o pares aplicadas como de las fuerzas de contacto, las cuales son eliminadas a partir de relaciones cinemáticas, esto conduce inevitablemente a un gran número de ecuaciones, brindando pobres resultados en términos de eficiencia computacional y haciendo limitado su empleo en el control con exigencias de tiempo real (Tsai, 2000, Filho and Cabral, 2006). La formulación de Newton-Euler parte del equilibrio de fuerzas y/o pares:. ∑ F = mv& ∑ T = I ⋅ ω +ω × I ⋅ ω. (1-45) (1-46). Es un algoritmo recursivo, se obtienen expresiones altamente no lineales que incluyen las cargas inerciales, fuerzas de acople entre las articulaciones, efectos de las fuerzas gravitacionales, con la dificultad adicional de que las fuerzas y/o pares dinámicos dependen de los parámetros físicos de la estructura robótica, de la configuración instantánea de las articulaciones, de la velocidad, aceleración y carga que soporta el robot. Aunque las ecuaciones del movimiento son equivalentes, ya sean analíticas o recursivas, los diferentes planteamientos dependen de los objetivos que se quieran conseguir con ellos. El algoritmo se basa en operaciones vectoriales (con productos escalares y vectoriales entre magnitudes vectoriales, y producto de matrices con vectores) siendo más eficiente en comparación con las operaciones matriciales asociadas a la formulación Lagrangiana. De hecho el orden de complejidad computacional de la formulación recursiva de Newton-Euler es O(n1), es decir crece en potencia de uno a los grados de libertad, esto indica que depende directamente de estos (Barrientos et al., 1997)..
(38) Capítulo 1 Marco Teórico. 27. El método de Newton-Euler encuentra su aplicación generalmente en el análisis de robots seriales, ya que para el caso de robots paralelos genera un gran número de ecuaciones y por ello representa un método muy poco eficiente, computacionalmente hablando (Limón, 2006). El método consiste en un cálculo de la propagación de las velocidades y aceleraciones, lineales y angulares de un eslabón a otro, partiendo de la base hacia el elemento terminal, seguido de un cálculo de las fuerzas y/o pares presentes en cada articulación, partiendo del elemento terminal hacia la base. Las velocidades y aceleraciones son obtenidas por la derivación del desplazamiento con respecto al tiempo (Tsai, 2000). El cálculo de propagación de las velocidades y aceleraciones lineales se lleva a cabo a partir de un análisis de movimiento relativo, mientras que el de las velocidades y aceleraciones angulares a partir de una suma vectorial. Estas cantidades deben expresarse además en el marco referencial correspondiente a cada eslabón durante la propagación mediante la correspondiente matriz de transformación. Así, una vez que las velocidades y aceleraciones de cada eslabón son determinadas, las fuerzas y/o pares en cada uno son determinadas a partir de las ecuaciones de Newton para movimiento traslacional y de Euler para movimiento rotacional. Las correspondientes fuerzas y/o pares en las articulaciones se obtienen a partir de proyectar éstas sobre el eje de cada articulación. En algunos casos es necesario solucionar le problema dinámico de un robot logrando tiempos relativamente pequeños de cómputo en el cálculo de las fuerzas y/o pares articulares para controlar el robot, en otros casos son necesarios planteamientos para facilitar el análisis y la síntesis del control (Limón, 2006).. 1.1.2. Formulación de Euler-Lagrange.. Las ecuaciones Lagrangianas o de Euler-Lagrange se utilizan para describir cualquier sistema mecánico por medio de coordenadas generalizadas de posición. El Lagrangiano se.
(39) Capítulo 1 Marco Teórico. 28. utiliza para los sistemas conservativos y es un caso particular de las ecuaciones de EulerLagrange (Payares, 2001). Es un método simple que permite obtener una serie de ecuaciones diferenciales no lineales de segundo orden acopladas, muy apropiadas para el estudio de estrategias de control en el espacio de estado de las variables articulares del robot. Tiene la ventaja de que deja fuera del análisis a las fuerzas de contacto y momentos mediante la definición de coordenadas y fuerzas generalizadas, esto hace que sea más eficiente que la formulación de Newton-Euler (Tsai, 2000), pero resultan ineficaces para aplicaciones en tiempo real dado el elevado tiempo de cómputo que requieren las operaciones con las matrices de transformación homogénea, donde el numero de operaciones a realizar es O(n4), es decir, crece en proporción a la cuarta potencia del número de grados de libertad. Sin embargo, conduce a unas ecuaciones finales bien estructuradas donde aparece de manera clara los diversos pares y fuerzas que intervienen en el movimiento (fuerzas de inercia, de Coriolis, de gravedad, etc). Se denominan coordenadas generalizadas a un conjunto de n parámetros qi que sirven para determinar de manera unívoca la configuración del sistema. Estos parámetros pueden ser cualesquiera, sin necesitar ser homogéneos en cuanto a sus dimensiones. Para un robot estas coordenadas corresponden a las variables articulares activas (Limón, 2006). Cuando las coordenadas generalizadas no son libres, el número de grados de libertad es diferente a n. Éste es el caso de los robots paralelos, para los cuales es necesario formular las ecuaciones de restricción necesarias de manera que el número de ecuaciones iguale al número de incógnitas, lo cual complica el método mientras mayor sea la movilidad del mecanismo. Es por ello que este método generalmente se usa para el análisis dinámico de robots seriales. Se denomina fuerza generalizadas Qi cuando estas representan todas las fuerzas no conservativas ni inerciales que son consistentes con las restricciones mecánicas del sistema, y que no representan reacciones de contacto, pudiendo así englobar tanto a una fuerza F.
(40) Capítulo 1 Marco Teórico. 29. como a un torque τ, según la correspondiente coordenada generalizada sobre la que actúa (Tsai, 2000). Para la formulación del Lagrangiano es necesario además introducir el concepto de la función Lagrangiana y de las ecuaciones de Lagrange: La función Lagrangiana (L) se define como la diferencia entre la energía cinética y potencial de un sistema, ésta se expresa como (Abdellatif and Heimann, 2009): L = T −V. (1-47). Conociendo la matriz de inercia y que la relación de velocidades entre el elemento terminal y las articulaciones activas está determinada por una Jacobiana Ji la cual puede subdividirse en dos submatrices. J i = [J vi. J ωi ]. T. que relacionen las velocidades lineales y angulares. respectivamente, entonces la energía cinética puede ser expresada para todo el sistema como:. T=. ∑ (v n. 1 2. i =1. T Gi. mv Gi + ω Ti UU I i ω i. ). T T ⎛⎛ dq ⎞ ⎛ dq ⎞ ⎛ dq ⎞ U ⎛ dq ⎞ ⎞⎟ ⎜ m⎜ J vi J T = ∑ ⎜ J vi + ⎜ J ωi I ⎟ ⎜ ⎟ ⎟ ⎟ U i ωi ⎜ dt ⎠ ⎝ dt ⎠ ⎝ dt ⎠ dt ⎠ ⎟⎠ ⎝ i =1 ⎝ ⎝ n. 1 2. T=. 1 2. dq dt. T. ∑ (J n. i =1. T vi. mJ vi + J ωi. TU U. I i J ωi. ) ddtq. (1-48). El término medio del lado derecho de la ecuación (1-48) se denota como la matriz M. Así: T. dq dq T= M dt dt 1 2. (1-49). En cuanto a la energía potencial se considera que los eslabones almacenan energía potencial gravitatoria en el caso más general. Definiendo como rGi la posición del centro de.
(41) Capítulo 1 Marco Teórico. 30. gravedad de cada eslabón y tomando en cuenta la definición de peso se puede expresar la energía potencial para todo el sistema como: n. V = −∑ mi g T rGi. (1-50). i =1. Donde el vector de la aceleración de la gravedad g se considera actuando en sentido contrario al eje z del marco inercial, de ahí el signo negativo de la ecuación (1-50). Así: g = [0 0 − 9.81]. T. (1-51). Sustituyendo las ecuaciones (1-49) y (1-50) en la (1-47) tenemos: T. dq dq n M + ∑ mi g T rGi dt dt i =1 n n n dq i dq i L = 12 ∑∑ M ij + ∑ mi g T rGi dt dt i =1 j =1 i =1 L=. 1 2. (1-52). Donde Mij corresponde al elemento (i, j) de la matriz de inercia M. Las ecuaciones de Lagrange se formulan en términos de la función Lagrangiana y representan un sistema de ecuaciones diferenciales definido como (Overgaard et al., 1995): ⎞ ∂L ∂L d ⎛ ⎜⎜ ⎟− = Qi , dt ⎝ ∂ (dqi dt ) ⎟⎠ ∂q i. para i = {1, 2, ..., n}. (1-53). Sustituyendo la ecuación (1-52) en la (1-53) y desarrollando se obtiene (Limón, 2006): n n ⎛ ∂M ij 1 ∂M jk d 2 qi ⎜⎜ + M ij −2 ∑ ∑∑ ∂qi dt 2 j =1 j =1 k =1 ⎝ ∂q k n. n ⎞ dq j dq k ⎟⎟ − ∑ m j g T J ivj = Qi j =1 ⎠ dt dt. i = 1,2, ...n. (1-54).
(42) Capítulo 1 Marco Teórico. 31. Donde Jivj corresponde a la i-esima columna de la submatriz Jvj. Así, el análisis dinámico del sistema se efectúa resolviendo el sistema de ecuaciones diferenciales presentado en la ecuación (1-54). Debido los problemas impuestos por una cadena cinemática cerrada, llega a ser muy difícil derivar las ecuaciones usando coordenadas generalizadas independientes. Para solucionar estos problemas, algunos investigadores recomiendan el uso de coordenadas adicionales además de los multiplicadores del Lagrange (Tsai, 2000, Filho and Cabral, 2006).. 1.1.3. Ecuaciones de Gibbs-Appell. El fundamento de estas ecuaciones, se sustenta en la transformación de un sistema restringido de n+m ecuaciones diferenciales (n es el número de coordenadas generalizadas y m el de ecuaciones de restricción) en un sistema de n ecuaciones diferenciales ordinarias. El sistema de n+m ecuaciones se obtiene al separar el sistema mecánico restringido para obtener un conjunto de varias cadenas abiertas. De esta forma se obtienen un número de n ecuaciones que definen el modelo dinámico de las cadenas abiertas (Diaz et al., 2007).. r r D ⋅ q&& = γ. (1-55). Siendo.. ⎡D D = ⎢ ee ⎣ Die. r r Dei ⎤ &r& ⎡q&&e ⎤ r ⎡γ e ⎤ , q = ⎢ r ⎥, γ = ⎢ r ⎥ && Dii ⎥⎦ ⎣γ i ⎦ ⎣ qi ⎦. (1-56). Donde D es la matriz de masas y se agrupa en varias submatrices: una asociada a las coordenadas independientes Dii, una correspondiente a las coordenadas dependientes Dee y &r& una asociada a las coordenadas dependientes e independientes Die. El vector q denota las coordenadas generalizadas y es el vector que contiene los términos de las fuerzas.
(43) Capítulo 1 Marco Teórico. 32. r centrifugas, Coriolis, gravedad y externas ( τ ). Al sistema de ecuaciones presentado en la. expresión (1-55) es necesario adicionar las m ecuaciones de restricción (Farhat et al., 2008):. [φ e. r r φ i ]q&& = b. (1-57). r Siendo b el vector que contiene términos dependientes de las velocidades generalizadas, y r [φ e φ i ]q&r& = b el Jacobiano de restricciones cinemáticas. Aplicando el principio de mínima. acción de Gauss al sistema constituido por las ecuaciones (1-55) y (1.57), se obtiene las ecuaciones (Farhat et al., 2007):. ⎡φ e ⎢0 ⎣. r r ⎤ φi ⎤ ⎡q&&e ⎤ ⎡ b r⎥ r T ⎥⎢ r ⎥ = ⎢ r T T − 1 T T Dii + X Dee X − Die X − X Die ⎦ ⎣ q&&i ⎦ ⎣γ i − X γ e + X Dee − Die φ e b ⎦. (. ). (1-58). Donde. X = φ e−1φ i Una de las principales razones del uso no extendido de estas ecuaciones radica en la dificultad para la obtención, de manera sistemática, de las submatrices independiente y dependiente de la matriz de masas (Farhat et al., 2008).. 1.1.4. Teoría Screw.. Esta teoría fue desarrollada por Sir Robert Stawell Ball, en 1876, para la aplicación en la cinemática y estática de los mecanismos o cuerpos rígidos. Es una forma de expresar los desplazamientos, las velocidades, las fuerzas y/o pares en un espacio tridimensional, que combina ambas partes, traslacional y rotacional. La teoría Screw se ha convertido en una herramienta importante en la mecánica de robots, diseño mecánico, cálculo y geometría dinámica de sistemas multicuerpos (Staffetti and Thomas, 2002). Las fuerzas y/o pares son importantes para el movimiento y pueden ser representados como un par de vectores de tres dimensiones llamado llave. Una forma de conceptualizar esto es.
(44) Capítulo 1 Marco Teórico. 33. considerar a alguien quien esta sujetando dos tablas de madera juntas por un tornillo metálico. La persona gira el tornillo aplicando un torque, que luego experimenta una fuerza neta a lo largo de su eje de rotación (Merlet, 2006). El giro y la llave se dicen ser recíprocos si:. r r r r ω ⋅ τ P + VP ⋅ F = 0. (1-59). En el sentido de que el movimiento del cuerpo rígido, un tornillo (screw) es una manera de describir un desplazamiento. Puede ser pensado como una rotación sobre un eje y una traslación a lo largo de ese mismo eje. Cuando una cadena cinemática está conectada a un cuerpo rígido el punto clave es que la posible velocidad instantánea de giros para el cuerpo rígido es recíproca a las llaves impuestas por las cadenas cinemáticas. En otras palabras, el grado de libertad del cuerpo rígido es determinado por la limitación de llaves (Merlet, 2006). Un robot paralelo con las siguientes afirmaciones incluye: 1.. La velocidad de giro de la plataforma móvil es la intersección de las de todas las extremidades del robot.. 2.. La llave de la plataforma móvil es la unión de todos los de las extremidades del del robot.. En la dinámica de los cuerpos rígidos, la velocidad, fuerzas y/o pares que actúan sobre ellos puede ser representada por el concepto de ¨screw¨. El primer análisis de screw es en el giro, se representa la velocidad del cuerpo, por la dirección de su velocidad lineal, su velocidad angular sobre el eje de la traslación, y la relación entre los dos, es el llamado Pitch que se denota como una distancia o altura entre las circunferencias que descrita esta espiral. Un movimiento en espiral con cero Pitch seria un movimiento circular, mientras que un movimiento con infinito Pitch seria un movimiento en línea recta. El segundo análisis se hace tangencial al movimiento en espiral, y refiere la fuerza y momentos que actúan sobre un cuerpo de una manera similar (Gallardo et al., 2008)..
(45) Capítulo 1 Marco Teórico. 34. Figura 1.5 Cinemática Espacial (Gallardo et al., 2008). Para el caso del giro donde se representa la velocidad del cuerpo y su velocidad angular para mover la representación del punto P al punto P´ (Figura 1.5), se tiene en cuenta para la rotación del cuerpo de tal forma que (Alvarado et al., 2004):. r r r r V P′ ′ = V P − r P P ′ × ω. (1-60). r r r ) ⎡VP′ ′ ⎤ ⎡1 − rPP ′ ⎤ ⎡VP ⎤ VP ′ = ⎢ r ⎥ = ⎢ ⋅⎢ r ⎥ 1 ⎥⎦ ⎣ ω ⎦ ⎣ ω ⎦ ⎣0. (1-61). Donde:. r VP : representa la velocidad lineal del punto P r VP′ ′ : representa la velocidad lineal del punto P´ r ω : representa la velocidad angular del cuerpo rígido. r rPP ′ : representa el vector desde P hasta P´ Para el caso de los pares y/o fuerzas es similar el análisis.. r r r r τ ′P′ = τ P − rPP′ × F. (1-62).
(46) Capítulo 1 Marco Teórico. r ⎡F⎤ ⎡ 1 ) τ P′ = ⎢ r ⎥ = ⎢ r ⎣ τ ′P′ ⎦ ⎣− rPP′. 35. r 0⎤ ⎡ F ⎤ ⋅ ⎢r ⎥ 1⎥⎦ ⎣ τ P ⎦. (1-63). Donde: r τ P : representa el par que surge en el punto P r τ ′P′ : representa el par que surge en el punto P´ r F : representa la fuerza total aplicada al cuerpo rígido. r rPP ′ : representa el vector desde P hasta P´. De forma general, un movimiento en tres dimensiones se puede definir mediante un análisis en espiral con determinada dirección y Pitch. Para definir un movimiento en espiral son totalmente necesarios cuatro parámetros, los tres componentes de un vector de dirección y el ángulo de giro sobre esa línea. En resumen, el método tradicional caracteriza el movimiento en tres dimensiones usando ángulos de Euler esto requiere de seis parámetros, tres ángulos de rotación y un vector de 3×1 para la traslación.. 1.1.5. Principio de Hamilton. Según el sitio web de la Escuela Técnica Superior de Ingenieros Industriales de la Universidad Politécnica de Madrid, en el departamento de física aplicada, disponible en http://mecfunnet.faii.etsii.upm.es/Xitami/webpages/teoria/pdfhamilton.pdf,. En. el. siglo. XIX, el irlandés William Rowan Hamilton, que había apreciado la potencia y elegancia con que Lagrange había dotado a la mecánica, emprende el trabajo de sistematización de la óptica, con objeto de someterla a un esquema parecido al de la mecánica..
(47) Capítulo 1 Marco Teórico. 36. En sistemas Lagrangianos holónomos*, es decir en aquellos sistemas holónomos posicionados por m coordenadas generalizadas independientes q1,…,qm; en los que el movimiento viene determinado por las m ecuaciones.. d. ∂L ∂q& i ∂L − = 0 ∀ ∈ {1, K , m} dt ∂qi. (1-64). Es posible reformular la dinámica de una manera más eficiente. La evolución de un sistema mecánico viene determinada, junto a las ecuaciones de Lagrange, por las condiciones iniciales q10 ,..., q m 0 , q&10 ,..., q& m 0 . El conjunto de los posibles 2m valores constituye el espacio de fases. Estas 2m coordenadas evolucionan en el tiempo satisfaciendo las ecuaciones dinámicas correspondiente, trazando una familia de curvas que llenan el espacio de fases sin cortarse unas a otras (congruencia de curvas). En este espacio de fases se pueden utilizar diferentes sistemas de coordenadas. Si se elige el sistema de coordenadas q1,…, qm , p1,…,pm donde (Miller, 2001):. pi =. ∂L ∂q& i. (1-65). Entonces se llega a una formulación de la mecánica mucho más potente (en el sentido que luego se precisará) basada en las ecuaciones de Lagrange. Sea la función Hamiltoniana o Hamiltoniano m. H (q1 ,K, q m , p1 ,K, p m , t ) = − L(q1 ,K, q m , q&1 ,K, q& m , t ) + ∑ pi q& i. (1-66). i =1. (*) Un sistema es holónomo, si las condiciones de ligadura son expresables mediante ecuaciones matemáticas entre sus coordenadas o ecuaciones diferenciales integrables..
Figure




+7





Documento similar
2.- Aunque, para elaborar un comentario completo, debemos formular varias preguntas, en los ejercicios pedagógicos es preferible que reduzcamos, sobre todo al principio,
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
SVP, EXECUTIVE CREATIVE DIRECTOR JACK MORTON
Social Media, Email Marketing, Workflows, Smart CTA’s, Video Marketing. Blog, Social Media, SEO, SEM, Mobile Marketing,
[r]
[r]
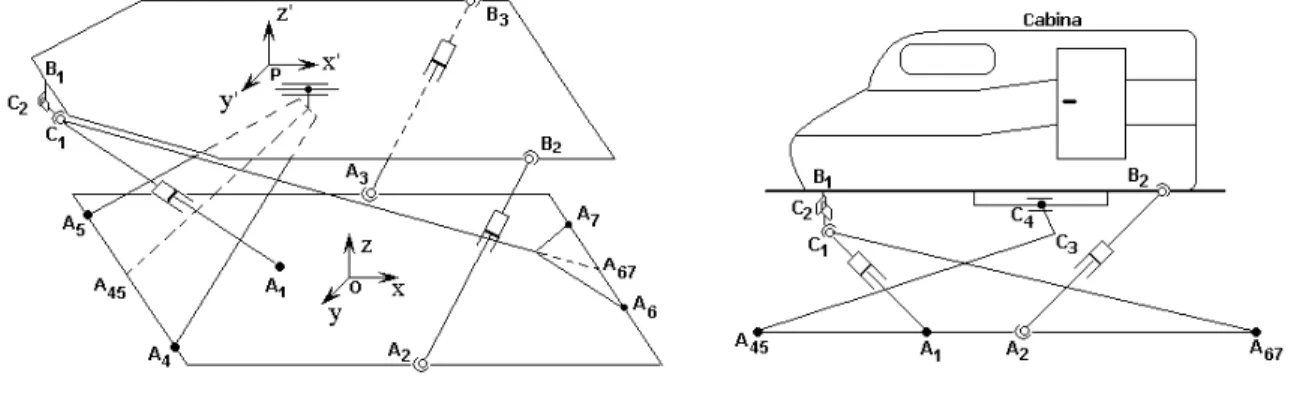
En este proyecto vamos a realizar un robot de estructura paralela donde controlaremos la posición del mismo mediante cilindros neumáticos, a continuación se explican las
