En el capítulo 1 tratamos el problema de la Estabilización Asintótica Global (GAS) del sistema (1), partiendo de la hipótesis de controlabilidad, se presenta un diseño simple de función de Lipschitz con retroalimentación continuaFRPAu=u(x) para la estabilización asintótica global de estable abierto. -Sistemas lineales en bucle, mediante un control positivo y acotado. Para ilustrar el método, en el Capítulo 3 tratamos el problema de la estabilización de sistemas que representan una mezcla en dos y tres tanques (con volumen constante).
Teoremas de controlabilidad para sistemas lineales
Si todos los estados del sistema son controlables, diremos que el sistema es totalmente CCP o simplemente CCP. El sistema (1.2) es un PCC si y sólo si se cumplen las siguientes condiciones i) la matriz de controlabilidad C= b, Ab,.
El problema de Estabilizaci´ on Global
En este capítulo, el problema de estabilización para el sistema (1) se resuelve con restricciones de signo y magnitud. Para resolver el problema de estabilización, asumimos que el sistema es controlable con controles positivos.
Estabilizaci´ on Global de Sistemas Lineales con Realimentaci´ on Positiva no Aco-
Si el sistema (1) es controlable con U = [0,∞), entonces la función de retroalimentación (1.8) es un estabilizador global. Concluimos que esta condición es suficiente para la estabilización asintótica global en el sistema de circuito cerrado (1)-(1.8).
Estabilizaci´ on Global de Sistemas con Retroalimentaci´ on Positiva Acotada
Se puede verificar que el valor propio de la matriz de Metzler A es μ0=λ0−δ y x0 su vector propio asociado (es decir, Ax0 = μ0x0). A partir de la definición de la derivada direccional y de (2.7), el control equivalente se da explícitamente y por tanto se obtiene. Está claro que para que la función ueq = −LAxLb sea positiva es necesario y suficiente que LAx <0.
Los pasos algebraicos seguidos para determinar la solución del sistema (3.17) son similares a los del apartado anterior. Luego concluimos que el mínimo de la función Dm(x) es positivo, y de la desigualdad D≥Dm se deduce que D > 0, es decir, los valores propios son reales. Según el modelo de la dinámica de la insulina y la glucosa en el cuerpo humano presentado por Sorensen en [11], en este apartado presentamos la estabilización de la parte lineal.
En la Sección 2 se desarrolla el problema de un caso de mezcla de tres tanques, se hace un estudio detallado de la entrada del vector L de tal manera que los valores propios de. La sección 4 presenta la estabilización de la insulina en el modelo de Sorensen.
Estabilizaci´ on r´ apida de una familia de sistemas lineales positivos mediante
Estabilizaci´ on de Sistemas Positivos Mediante Modos Deslizantes
Si A es Metzler y Hurwitz en el sistema (2.2), el único punto de equilibrio positivo ¯x=−A−1b¯u (con ¯u constante) es globalmente asintóticamente estable. Para responder a la pregunta anterior debemos considerar que el sistema (2.1) no es controlable; según el teorema de controlabilidad de Brammer, ver trabajo [2]. Debido a que es un Metzler y tiene al menos un valor propio real, el sistema no es completamente controlable con control positivo.
Según el teorema de Frobenius-Perron para matrices de Metzler, dado que AT es Metzler, existe un número real µ0 y un vector x0 ≥ 0 tal que xT0bu ≥ 0 para todo u≥0. A continuación presentamos un método deslizante para responder al problema de la estabilización rápida.
Modos deslizantes para sistemas afines
Una ley de control con estructura variable se obtiene permitiendo a la función de control uno de los valores de realimentación, según el signo de s(x), definido por. Supongamos que como resultado de aplicar la política de control (2.4) a las trayectorias de estado (2.3), se alcanza la superficie S, de tal forma que podemos definir el sistema (2.3) en el conjunto de discontinuidades S. La función Control de retroalimentación La función ueq(x) se denomina función de control equivalente.
Una condición necesaria y suficiente para que el control equivalente esté bien definido es la condición de transversalidad. Supongamos que, para demostrar la unicidad, la condición de invariancia se cumple con dos controles equivalentes diferentes u1eq y u2eq, si se cumple la condición de transversalidad, entonces de (2.7) se deduce que. La condición de transversalidad es sólo una condición necesaria para la existencia del régimen deslizante, lo cual se demuestra mediante el siguiente lema.
Una condición necesaria para la existencia de un régimen deslizante en S es que el control equivalente esté bien definido en S. Una condición necesaria y suficiente para la existencia local de un régimen deslizante en S es que , en X, para x en S.

Modos deslizantes para sistemas lineales
Cuando se satisfacen las desigualdades (2.13), se crea una dinámica invariante en el hiperplano Lx = k. Podemos decir que esta dinámica corresponde al uso del llamado control equivalente, denotado por ueq y definido para x tal que Lx = k, por lo que se puede calcular a partir de la igualdad Lx˙. Buscamos valores de los parámetros implicados en el sistema de retroalimentación para que la estabilización sea rápida. En el caso de Aeq, si es una matriz compartimental, entonces σ(Aeq)∩C+ = Ø, lo que implica que el valor propio λ= 0 es dominante, según el teorema de Frobenius-Perron para matrices de Metzler.
En este capítulo se estudian 3 modelos de sistemas dinámicos lineales positivos, en los que aportamos elementos para mejorar la estabilización mediante la teoría de modos deslizantes. Además, cabe señalar que por el punto fijo pasan muchas líneas rectas. Más precisamente, existe una vecindad S de la superficie de cambio S tal que cualquier solución x(t, x0) que comience en la vecindad S tiende al punto de equilibrio x= más rápidamente bajo la acción de ueq que bajo la acción del control constante u. .
Una vez satisfechas las desigualdades (2.13), definimos el control deslizante ueq en el segmento del hiperplano Lx=k. En el capítulo 2, se estudia el sistema lineal ˙x=Ax+bu, dado que dicho sistema no tiene la hipótesis de controlabilidad, utilizamos la teoría de modos deslizantes para estabilizarlo. Motivando el estudio de la teoría desarrollada en el capítulo 2, en el capítulo 3 se presentan varias aplicaciones, en cada una de ellas la estabilización se logra con modos deslizantes.
En el primer apartado se presenta el caso de mezclas con dos reservorios, en esta aplicación se obtienen resultados interesantes como el de la figura (3.3), aunque lamentablemente no existe un resultado que lo garantice, se presenta al final. de cada aplicación una simulación (en simnon) que muestra el beneficio de aplicar el método de control ueq equivalente.
Aplicaci´ on de un caso particular de Sistemas Compartimentales 29
Un caso de mezcla con tres tanques
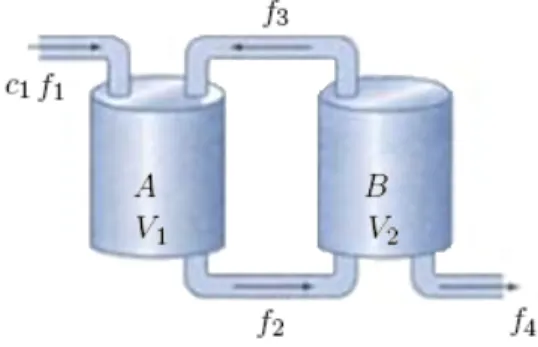
Ambos tanques están conectados entre sí; hay un flujo de salmuera f2 del tanque B al tanque A, un flujo f3 del tanque A al tanque B, un flujo f4 del tanque C al tanque B, un flujo f5 del tanque B al tanque C. Además, desde el exterior hay un fluye f1, con c1 libra de sal por litro, al tanque A, y desde el tanque C hay un flujo f6 hacia afuera. En general para valores arbitrarios de li >0; hemos establecido que la matriz Aeq tiene valores propios reales negativos, desde entonces.
Es importante señalar que podemos tener múltiples planos deslizantes, por lo que también consideramos el objetivo de convertir la superficie en un atractor con tantos atractores como sea posible. A continuación, proponemos elegir el plano, es decir, los parámetros positivos l1, l2 y l3, de modo que el conjunto {σ(Aeq)\0} quede lo más a la izquierda posible de C−, con el objetivo de aumentar la velocidad de convergencia de las soluciones. Considerando LAx dada por (3.20) y la condición LAx < 0 de que hay deslizamiento, esto significa que se deben satisfacer las desigualdades.
Para asegurarnos de que Aeq sea una matriz de Metzler, solo necesitamos demostrar que dos entradas en la primera fila tienen valores mínimos no negativos para caras admisibles, de modo que. La curva roja representa la solución del sistema (3.17) con u, mientras que la otra curva representa la solución con deslizamiento.

El caso de mezclas con n tanques
Dado que la matriz A es compartimental, del teorema de Gerschgorin (ver [4] y [5]) se deduce que si A es una matriz compartimental, entonces σ(A)∩C+.
Estabilizaci´ on de la insulina en el modelo de Sorensen
Observamos que la matriz A de este modelo es de Metzler y Hurwitz, por lo que se satisfacen las condiciones de positividad y deslizamiento presentadas en la parte I. Cálculo del punto de equilibrio x del sistema deslizante ˙x=Ax+bueq(x ); entonces Ax+bueq(x) = 0. es decir, la proporción entre las entradas del punto de equilibrio no cambia, independientemente del hiperplano elegido. Consideremos el siguiente gráfico que representa la distancia versus el tiempo de una trayectoria que parte de una condición inicial x0 hasta el punto de equilibriotx, bajo control constante u y control ueq.
Se introducen las ideas y conceptos matemáticos básicos para comprender el control por modo deslizante, destacando sus atractivas propiedades de robustez y la posibilidad de ser aplicado con relativa facilidad a sistemas lineales. Después de una breve introducción, se estudian las ideas de funcionamiento y desventajas a la hora de buscar soluciones utilizando métodos tradicionales de análisis de sistemas, para ello se describe el método de control equivalente, el cual está relacionado con el movimiento de deslizamiento ideal. Este control garantiza el deslizamiento sobre el hiperplano Lx−k= 0, es decir, aplicándolo al flujo de entrada f1 se asegura una mayor velocidad para alcanzar el punto de equilibrio, de modo que, para dadas condiciones iniciales de las soluciones, las concentraciones en el Los tanques se pueden estabilizar en menos tiempo a diferencia de usar una constante en el flujo, es decir, logramos una convergencia más rápida al punto de equilibrio x.
Generalizando el estudio del problema de la mezcla, la sección 3 presenta un caso general para esta aplicación. Dado que se hizo un estudio extenso en cada sección para elegir L, se podría considerar una hipótesis de que la mejor elección es tomar L, al menos para el problema del tanque.







