Nos centraremos en el estudio únicamente del caso en el que las tres líneas se cruzan. La intersección de L1 y L2 en Σ en diferentes puntos da lugar a la existencia de al menos tres segmentos diferentes en Σ delimitados por L1 o L2, en los que el flujo puede cruzar Σ de una región a otra, o en el punto puede colisionar desde la intersección. en Σ y así deslizarse sobre él. En el segundo capítulo se propone y calcula una forma normal para la familia SLPP antes mencionada.
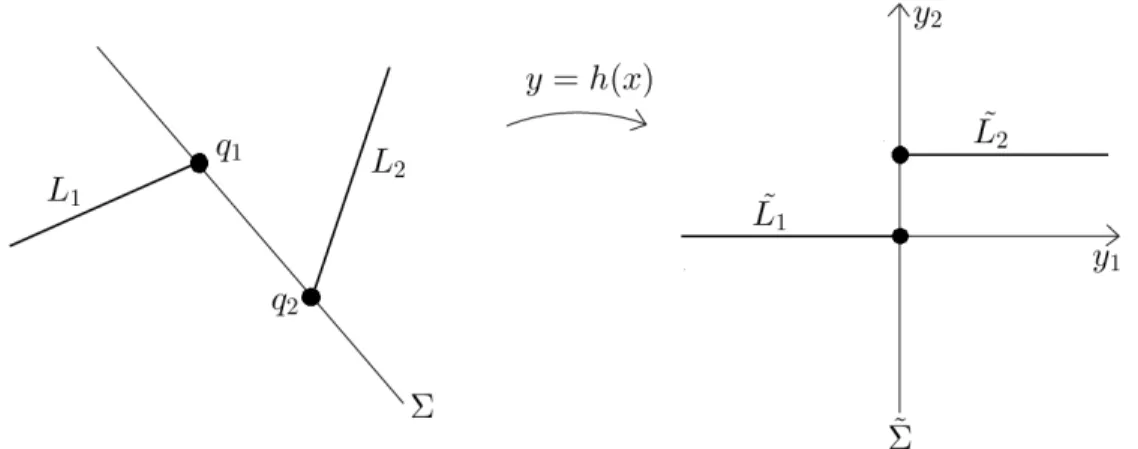
Este capítulo presenta conceptos y definiciones básicos y fundamentales en el estudio de SLPP y establece hipótesis generales que se utilizarán como convención a lo largo de este capítulo. estudiado más tarde. La importancia de estas líneas se debe a que indican cuándo regresa el flujo de una región a otra, lo cual es fundamental en el análisis y búsqueda de ciclos de frontera, especialmente cruces, que es el objetivo principal de este trabajo. La figura 1.1 muestra la representación geométrica del sistema (1.1) en el plano.
Teniendo estas tres rectas en el plano, queda claro que, si las rectas Li no son paralelas a Σ, se crean los puntos de intersección de cada recta Li con Σ, en los cuales el flujo en uno de los dos campos es tangente. a Σ, por eso los llamamos. Para garantizar la existencia de puntos tangentes en el sistema (1.1), es necesario establecer una condición, lo que implica que ninguna de las tres rectas Σ, L1 o L2 sean paralelas entre sí. Podemos ver que si q2 → q1, entonces b → 0, entonces si b = 0, entonces dichos puntos colapsan hasta el punto de doble tangencia.
Este capítulo desarrolla el cálculo del mapeo lateral que se utilizará más adelante para demostrar la existencia de ciclos de frontera de intersección, dependiendo del tipo de tangente que existe en cada una de las dos regiones del plano. .

Tangencia invisible
Caso real
De esta manera, podemos escribir la expansión de Taylor alrededor de 0 de h1 y h2 de la siguiente manera:
Caso complejo
De manera análoga, podemos repetir el procedimiento anterior para H2 y así es posible aplicar el Corolario 3.2 a las funciones complejas suaves H1 y H2 y encontrar que, al igual que en el caso real, h1 y h2 son aplicaciones (3.13) y (3.14). en este caso también. Consideremos ahora los casos restantes en los que las convenciones especificadas en (3.3) no se cumplen. Si hay una tangente invisible, los mapas laterales h1 y h2 en x1 <0 y x1 >0, respectivamente, están dados por .
Por otro lado, si λi > 0, tenemos que eλit1 > 1 y, repitiendo el procedimiento anterior, podemos obtener nuevamente una contradicción suponiendo que se cumple (3.4). De manera análoga, podemos repetir el procedimiento exhaustivo anterior sobre δi y así demostrar que (3.5) no tiene solución real cuando r2 >0. En otras palabras, el sistema (3.2) no tiene solución real en una región, cuando en la misma existe una tangencia aparente en el origen.
Cuando existe tangencia invisible, la solución del sistema en cuestión puede ser real y compleja, por lo que no se especifica la dinámica.
Tangencia visible
Ahora usaremos las funciones E1 y E2 para calcular los espejos laterales h1 y h2, usando el Teorema de la función implícita (ver Apéndice C). Podemos diferenciar esta última expresión para calcular las derivadas de orden superior en v = 0 de la función h1. Este capítulo presenta al menos un resultado por sección, en el que se establecen las condiciones para la existencia de un ciclo límite, o un análisis de la dinámica alrededor del doble punto de tangencia (el origen), en caso de que no existan ciclos límite, como como caso r1 =r2 = 0 (ver Figura 4.1).
Esta sección presenta un resultado típico del escenario con r1 = r2 = 0 de la Figura 4.1, llamado foco-foco, en el que se determina la estabilidad del doble punto de tangencia, es decir, el origen. Tenemos que el disco discriminante de la función H truncada a orden dos es el disco= 1−4a2u01e2α2π. Para encontrar los puntos fijos del mapa en cuestión buscaremos los ceros de la siguiente función.
Se presenta un análisis de la dinámica en torno al origen y las condiciones para la existencia de los ciclos centro y límite con su respectiva estabilidad. A continuación se muestra un resultado que trata sobre la existencia de un centro en el sistema (4.29). Con esta información, podemos bosquejar la función h para v1 < 0, como se muestra en la Figura 4.12.
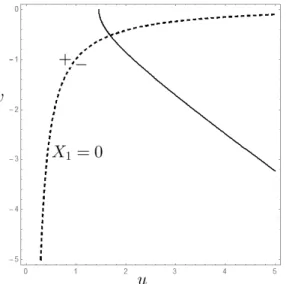
Esta sección presenta una prueba mediante un enfoque geométrico de la existencia de un ciclo límite en el caso de r1 < 0 y r2 > 0, conocido como silla fusionada. De la misma expresión para H(v), también es fácil ver que, dados los signos de los parámetros u0 y a0, sólo hay dos escenarios posibles en los que podemos esperar asegurar la existencia de dicha v: si u0 < 0 y a0 >0 o si u0 > 0 y a0 < 0. Luego, de forma similar a como en los apartados anteriores, podemos derivar sucesivamente este último término para obtener derivadas de orden superior en u01 = 0 de la función g1.
Entonces, a partir de esta última expresión, podemos resolver para obtener u01. Usando el Teorema de la Función Implícita, podemos garantizar la existencia de una función diferenciable g2 tal que. Hasta la fecha, no ha sido posible proporcionar una demostración analítica de la existencia de un ciclo límite en este escenario, pero en [11] se sospecha la existencia de no más de un ciclo límite. . La Tabla 4.1 enumera las expresiones para h1 y h2 dependiendo del tipo de tangencia y la Tabla 4.2 resume la información para todos los casos en la Figura 4.1.

Ciclos l´ımite en sistemas sin deslizamiento 34
Casos con un equilibrio frontera y tangencia invisible
En otras palabras, la aplicación (4.25) tiene un punto fijo distinto de cero, lo que implica la existencia de un ciclo límite sólo si α1d2 <0.
Casos con un equilibrio frontera y tangencia visible
Casos con tangencia visible-invisible
Además, si p1 es el foco inestable en x1 < 0, este es un foco inestable del sistema (ver Figura 4.6).

Foco fundido
- Existencia de un centro
- Ciclos l´ımite y estabilidad
A continuación se presentan dos ejemplos, ambos con µ1 = µ2 = 0, donde se ilustra la conclusión obtenida con el resultado anterior. En general, cuando µ1 = µ2 = 0, mientras haya dos sillas, el centro está acotado por un ciclo heteroclínico. A continuación se realiza un análisis de estabilidad del origen y se demuestra la existencia o no existencia de un ciclo límite en el sistema en cuestión.
De manera similar, sic2µ2 >0 hay un ciclo límite para µ1 <0, mientras que no hay ciclo límite si µ1 >0.

Silla fundida
Ahora, para determinar la estabilidad de dicho ciclo límite, usaremos diagramas de tela de araña como se ilustra en la Figura 4.17. Con lo anterior, se ha desarrollado una prueba con un enfoque geométrico del siguiente enunciado: En el estudio de SLPP en el plano, cuando se da un sistema y tres líneas arbitrarias (una de ellas la línea de conmutación), el escenario más común que sobre es común que estas líneas se crucen en diferentes puntos.
Para obtener escenarios específicos, como uno donde todas o algunas líneas son paralelas entre sí, o donde dos líneas se cruzan en el mismo punto, como el caso estudiado en esta tesis, es necesario determinar las condiciones para los parámetros del escenario dado. . sistema. En este trabajo fijamos estas condiciones, tanto para obtener la correspondencia de las rectas en un punto común, como para excluir la existencia de segmentos deslizantes en la conmutación. Muchos autores que trabajan con este tipo de sistemas proponen sus propias formas normales, cada una dependiendo de lo conveniente que le resulte para resolver el problema de su interés particular.
En este trabajo propusimos una forma normal particular, la cual fue conveniente debido a la reducción en el número de parámetros originales, la ortogonalización de las tres rectas dadas y la equivalencia topológica de dicha forma normal, y el sistema originalmente dado, que la convirtió en posible trabajar directamente. con el primero en lugar de con el segundo, reduciendo así la dificultad del problema planteado. Con una expresión simplificada del sistema a estudiar, se procedió a calcular las funciones utilizadas como herramientas en la solución del problema abordado en esta tesis, es decir, en la búsqueda de ciclos límite de cruce, así como la prueba de su respectiva existencia. Se observó que estos cálculos y funciones dependían significativamente del tipo de tangencia que tuvieran y se distinguieron los casos de tangencia invisible y visible, por lo que se obtuvieron las expresiones para las funciones laterales en cada caso correspondiente, con lo cual se realizó el mapeo (composición o resta ) necesaria para el análisis de los ciclos límite de cruce.
Un cuarto épsilon de p es el conjunto de todos los números reales que están a una distancia ε de p. Si todos los puntos lo suficientemente cercanos a p son atraídos por p, entonces p se llama sumidero o atractor de punto fijo. Si todos los puntos lo suficientemente cercanos a p se alejan de p, entonces p se llama punto fijo o fuente repulsivo.
En otras palabras, si existe un ε >0 tal que cada x∈Nε(p), excepto p, está mapeado por Nε(p), entonces p es una fuente. Ahora, utilizando razonamientos y cálculos inductivos, es fácil concluir que las imágenes bajo F1 de la línea su=kv, con k < 0, son los círculos.