Página | 0
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD ZACATENCO
“
CONTROL Y MONITOREO DE FACTORES CRITICOS
DE UNA CASA POR MEDIO DE INTERNET
”
Que para obtener el Título de Ingeniero
en Comunicaciones y Electrónica
P R E S E N T A N:
Flores Meneses Enrique Alan
García Gómez María Fernanda
Lucero Maldonado Juan Carlos
ASESORES:
Ing. Mancilla León Armando
M. en C. Galicia Galicia Roberto
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
UNIDAD PROFESIONAL "ADOLFO LOPEZ MATEOS"
TEMA DE TESIS
QUE PARA OBTENER EL TITULO DE POR LA OPCION DE TITULACION DEBERA(N)DESARROLLAR
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA TESIS COLECTIVA Y EXAMEN ORAL INDIVIDUAL
C. ENRIQUE ALAN FLORES MENESES
C. MARIA FERNANDA GARCIA GOMEZ C. JUAN CARLOS LUCERO MALDONADO
"CONTROL A DISTANCIA DE FACTORES CRÍTICOS DE UNA RESIDENCIA POR MEDIO DE INTERNET"
0úV
ELABORAR UN UNA CASA A
• DISEÑO i M cj NcNセャMャ kk ol\O ャAj i Naj@
CRÍTICOS.
• DISEÑO y LJJ:A).t-iKKVJlJLV
ING. AR
D.F. A 25 DE ABRIL DE 2011.
CONTENIDO
Capítulo 1 OBJETIVOS Y JUSTIFICACIÓN1.1 Objetivo General---2
1.2 Objetivos Particulares---2
1.3 Justificación---3
1.4Antecedentes---4
1.5Estado del arte ---6
Capítulo 2: “INTRODUCCIÓN 2.1 Descripción General del sistema---13
2.2 Sistema de control---14
2.2.1 Sistema de control a distancia---17
2.3 Descripción de los transductores---18
2.3.1 Relevadores---19
2.3.2 Caudalímetros---21
2.3.3 Válvulas---24
2.4 Descripción del Micro-controlador---26
2.5 Descripción del software---28
Capítulo 3: “DISPOSITIVOS Y ELEMENTOS DEL SISTEMA” 3.1 Dispositivo central Sistema Operativo en Tiempo Real MQX---30
3.1.1 Sistema Operativo en tiempo real MQX---30
3.1.2 Diseño esencial del sistema operativo MQX---31
3.1.3 Módulos en el sistema operativo MQX---31
3.2 Conjunto de bibliotecas RTCS---33
3.3 Servidor Web---35
3.4 Controlador GPIO---36
3.5 Ambiente de desarrollo---36
3.6 Introducción a los lenguajes de programación (C, HTML, Java Script, AJAX)---38
3.6.1 Lenguaje HTML---38
3.6.2 Lenguaje Java Script---38
3.6.3 Contraseñas en Java Script---40
3.6.4 Lenguaje C---40
3.6.4.1 Características---41
3.6.4.2 Uso de las funciones---41
Capítulo4: DESARROLLO DEL SISTEMA DE CONTROL A DISTANCIA
4.1 Características técnicas de los dispositivos---45
4.1.1 Tarjeta de desarrollo---45
4.1.2 Relevadores---47
4.1.3 Caudalímetro de agua y gas---48
4.1.4 Válvula---48
4.2 Diseño de los circuitos de simulación---50
4.2.1 Circuitos equivalentes a los reales---51
4.2.2 Diseño de los circuitos a implementarse---53
4.2.2.1 Válvulas de agua y gas---53
4.2.2.2 Niveles de agua y gas---54
4.2.2.3 Luces---54
4.2.2.4 Caudalímetro de agua y gas---55
4.2.3 Desarrollo de los circuitos---56
4.3 Interfaz con usuario ---63
4.3.1 Diseño de las páginas web---63
4.3.1.1 Página de Bienvenida y su código---64
4.3.1.2 Página de control y monitoreo de Gas---68
4.3.1.3 Página de control y monitoreo de agua---72
4.3.1.4 Página de control y monitoreo de luz---76
4.3.2 Comunicación entre la página web y el microcontrolador---81
4.4 Control De Puertos---82
4.5 Páginas con contenido dinámico---86
4.6 Sistema TFS---90
4.7 Programación del microcontrolador---91
4.7.1 Tareas---91
4.7.2 Definición de funciones CGI---93
4.7.3 Sistema de archivos TFS---94
4.7.4 Función de control---95
4.7.5 Función de monitoreo---95
ESTUDIO DE MERCADO---97
CONCLUSIONES ---99
GLOSARIO---100
ANEXOS
Anexo A ---103INDICE DE ETIQUETAS DIAGRAMAS, FIGURAS, IMÁGENES, TABLAS
Fig2.1 Diagrama “Sistema de control a distancia de variables críticas” ---13
Figura 2.2.1 Diagrama a bloques del sistema de control---17
Figura 2.3.1 Diagrama general de un relevador---19
Figura 2.3.2.a; “Caudalímetro de flujo” ---21
Figura 2.3.2.b; “Fórmula delcaudal” ---22
Figura 2.3.2.c; “Contador de ruedas ovales” ---22
Tabla 2.3.2.d; “Tabla de ventajas y desventajas caudalímetros” ---23
Figura 2.3.3 ”Electroválvula” ---25
Figura 2.4 “Microcontrolador TOWER de FREESCALE” ---27
Figura 3.1.2. Composición del kernell del MQX. ---31
Figura 3.1.3 a; Comparación entre un sistema operativo en tiempo real y el sistema operativo convencional. ---32
Figura 3.1.3.b; Operación de las tareas---32
Diagrama 3.2.a; RTCS incluido en la distribución de MQX---33
Diagrama 3.2.b; .Diagrama de inicialización de comunicaciones (RTCS). ---34
Diagrama 3.2.c; Proceso para crear un socket---34
Diagrama 3.2.d; Proceso de inicialización del servidor WEB. ---35
Figura 3.5.a; Imagen de IDE CodeWarrior. ---37
Figura 3.5.b; Ambiente de desarrollo Visual Studio2010---37
Etiqueta 3.6.2.a; Muestra la relación entre objetos de Java Script. ---39
Etiqueta 3.6.2.b; Muestra el código para abrir una ventana nueva. ---39
Etiqueta 3.6.4.2 Estructura de función---41
Figura 4.1.2.a; TOWER FREESCALE---45
Figura 4.1.2.b; Microcontrolador MCF51252CN---46
Figura 4.1.2.c; Ethernet con DMA---47
Figura 4.1.3 Relevador---48
Figura 4.1.a; Caudalímetro de gas---48
Figura 4.1.5 Caudalímetro de agua---48
Diagrama 4.2.2.1 Simulación de válvula de agua y gas---53
Diagrama 4.2.2.2 Simulación de los niveles de agua y gas---54
Diagrama 4.2.2.3. Simulación de las luces---55
Imagen 4.2.3.a ; Tower---56
Imagen 4.2.3.b; Vista lateral Tower---57
Imagen 4.2.3.c; Circuitos conectados a la Tower superior---57
Imagen 4.2.3.d; Circuitos conectados a la Tower lateral---58
Imagen 4.2.3.e; Circuito Nivel de agua---58
Imagen 4.2.3.f; Circuitos para medir niveles de agua y gas---59
Imagen 4.2.3.g; Acercamiento circuito niveles---59
Imagen 4.2.3.h; Circuitos de simulación de Caudalímetro---60
Imagen 4.2.3.i; Circuito de simulación caudalímetro---60
Imagen 4.2.3.j; Circuitos de simulación de válvula---61
Imagen 4.2.3.k; Circuito de simulación de válvula---61
Imagen 4.2.3.l; ---62
Figura 4.3.1.1; Página de Bienvenida. ---64
Figura 4.3.1.2; Página de control y monitoreo de gas---68
Figura 4.3.1.3 Página de control y monitoreo de agua---72
Imagen 4.3.1.4; Página de control y monitoreo de luz. ---76
Figura 4.4.a; Estructura de control de los subsistemas---83
Figura 4.4.b; Estructuras de control para los dispositivos---83
Tabla 4.4.c; Ejemplo de llamadas entre funciones ANSI y APIs de MQX---84
Etiqueta 4.4.a Código de la función fopen---85
Figura 4.4.c; Estructura puerto GPIO---85
Etiqueta 4.4.b Código de la función ioctl---86
Etiqueta 4.5.a Fragmento del mapa de asignación CGI ---87
Etiqueta 4.5.b; Llamado de una función a archivos CGI---87
Etiqueta 4.5.c; Fragmento de código para asociar una petición de usuario con una función CGI---88
Etiqueta 4.5.d; Fragmento---88
Etiqueta 4.5.e; Fragmentos de AJAX---89
Etiqueta 4.6. Código para convertir un archivo a código del microcontrolador---90
Etiqueta 4.7.1 Código de tarea principal Main_Task---92
Etiqueta 4.7.2.a; Definición de funciones CGI---93
Etiqueta 4.7.2.b; Definición de funciones CGI---93
Código 4.7.3 Conversión de una imagen .gif a código c---94
Código 4.7.4 Ejemplo de función para el control de las luces---95
Página | 1
1
2010
I P N
ESIME ICE
22/11/2010
Control y monitoreo a distancia
de factores críticos
OBJETIVO Y
1.1 OBJETIVO GENERAL
Diseñar e implementar un sistema de control y monitoreo de factores críticos de una casa-hogar: factores primarios de consumo como el agua, luz y gas.El sistema se manipulará a distancia mediante un sistema a través de un microcontrolador, dicho microcontrolador detectará los cambios en el conteo en los factores y los reflejará en una página Web desde donde el usuario podrá observar el consumo de los factores, con ayuda de éste sistema se pretende promover y concientizar el ahorro de dichos servicios.
1.2 OBJETIVOS PARTICULRES
Cubrir y mejorar varias de las necesidades de los usuarios, destacamos: · Aumentar la seguridad
· Incrementar el confort · Mejorar las comunicaciones · Ahorrar energía, dinero y tiempo · Facilitar el control integral de la casa · Ofrecer nuevos servicios
Reducir costos y espacio del sistema de control de acceso y monitoreo.
Implementar el sistema de control y monitoreo sin la necesidad de una computadora local.
Utilizar la infraestructura existente del servicio de internet para realizar el control de acceso y monitoreo.
1.3 JUSTIFICACIÓN
En todo el mundo existe tendencia a controlar y administrar los hogares con sistemas electrónicos de control, esto es debido al rápido desarrollo de la tecnología de internet, que permite que cualquier dispositivo (computadora, PDA, Smart Phone, entre otros) pueda conectarse a esta red y a su vez ser accesada a través de ella, en México existe esta misma tendencia, pero en menor medida que en los países precursores de estas tecnologías. Esta situación propicia a que surjan muchas aplicaciones muy útiles, por ejemplo video conferencia, sistemas de seguridad a distancia. Intercambio de información a través de redes sociales, enlaces telefónicos a través de VoIP, tanto intercambiable dentro de una organización como entre particulares. Otra de las aplicaciones es el monitoreo y control a distancia. También existen sistemas para la administración eficiente de energía, como la iluminación, calentadores solares, otra área de la aplicación es el control de variables críticas como son electricidad, agua y gas. Son críticas porque son principales factores de riesgo tanto para los hogares y las personas, ya que son fuente posible de daño.
En el mundo existen muchas empresas que se dedican a desarrollar las aplicaciones mencionadas anteriormente, pero pocas se enfocan a controlar las variables críticas y en México no hay una empresa especializada en controlar los factores críticos de una casa, por lo que este proyecto toma una importancia en el principio del control a distancia de los factores críticos de una residencia.
El presente proyecto se enfoca en desarrollar un sistema de control de variables críticas (electricidad, luz y gas) además se podrá monitorear vía internet debido a que en la actualidad hay muchos lugares donde se puede tener acceso a internet y desde ahí se podrá administrar de forma segura y confiable por medio de seguridad de alto nivel de la página de internet, se contará con las formas manual y automático para la administración de los recursos.
1.4 ANTECEDENTES
La domótica es una serie de sistemas tecnológicos que aportan diferentes servicios al hogar, estos servicios pueden ser de seguridad, bienestar, comunicación, de gestión energética. etc. La domótica está integrada por redes de comunicación tanto interior como exterior ya sea de forma inalámbrica o alambrada. Esta no solo va dirigida a las viviendas, sino también a los comercios, edificios, granjas. La domótica se ha implantado desde hace décadas, pero, desde que se creó el Internet éste ha tomado un giro controversial, los modelos tecnológicos relacionados a éste han progresado y forman parte del futuro de la domótica. Las tecnologías inalámbricas WiFi y las redes de Internet, creen haberse constituido, como las tecnologías del entorno digital que evolucionarán, y sobre las cuales la domótica debería mantenerse para poder aumentar el uso de las tecnologías en los hogares.
Debemos de tener en cuenta algunos elementos para poder instalar este sistema como es:
El incremento en el confort.
Control de luces, ventanas, cortinas, persianas y tomas de alimentación eléctrica.
Uso de energía renovable como la energía solar, la geotérmica y la eólica.
El deseo de las personas de tener un control de lo que realiza ha ido en aumento vemos hoy en día grandes compañías que con tan solo apretar un botón realizan grandes procesos. Pero el control a distancia comenzó en los años 70 con una empresa llamada Accutrac, la cual, desarrollaba innovaciones electrónicas, y utilizaban una tecnología nueva para su tiempo, ya que, utilizaba un telecomando ultrasónico. La idea del mando a distancia de Accutrac generó la idea de controlar las luces y los electrodomésticos con mando a distancia, y así en 1975 se concibió el proyecto X10.
Pero que significa X10, básicamente, es un lenguaje de comunicación que funciona a través del cableado eléctrico del lugar donde se aplique, que por lo general es una casa. Así que mediante esta tecnología se comenzaron a hacer grandes innovaciones; tal como lo comenta uno de sus pioneros, cita lo siguiente:
En el año 2003 se anuncia la creación de casas automatizadas, es decir que, además de tener un control de acceso presenta algunas innovaciones más como el control de electrodomésticos y aparatos electrónicos.
La estructura interna de estas casas tienen una parte importante llamada pasarela residencial, la cual, es la encargada de adaptar los protocolos y flujos de datos de internet la red interna de datos y control de la vivienda, además de permitir que varios ordenadores o dispositivos compartan información, periféricos y acceso único a Internet. También deberá actuar como cortafuegos, impidiendo que los intrusos puedan acceder a la red interna de la casa. La pasarela permitirá, no sólo el telecontrol de la vivienda, sino además el entretenimiento, el comercio electrónico o el cuidado de personas discapacitadas, entre otros.
La siguiente estructura de las casas automatizadas es, el sistema de control centralizado, a veces integrado en la propia pasarela, consiste en un microcontrolador encargado de gestionar y controlar todos y cada uno de los elementos de la red domótica. El dispositivo puede ser gestionado por el usuario mediante un navegador, accesible mediante una pantalla táctil, un mando a distancia o a través del teléfono móvil o de Internet.
En el año 2004 en Hermosillo Sonora, México; se forma una empresa llamada “Futuro Inteligente”. Los fundadores de la empresa; el Lic. Gabriel Lucero y el Ing. Marco Gaxiola iniciaron operación, con pequeños proyectos de automatización en viviendas utilizando tecnología X10.
La empresa ha evolucionado favorablemente a los temas de la seguridad, control de acceso y diseño de proyectos tecnológicos. Se ha empezado a satisfacer primeramente necesidades de seguridad y donde el uso de la tecnología RFID y huella digital brinda soluciones efectivas a sus clientes.
“Futuro Inteligente”es una empresa pionera en productos de alta tecnología en temas referentes a integración de soluciones mediante el uso de la Biometría y sus distintas aplicaciones, donde se caracterizan por ser de las pocas o únicas empresas en el noroeste de México “en ser un centro de desarrollo y laboratorio destinado a crear, innovar y facilitar esta tecnología”.
Tiene una computadora completamente equipada para proporcionar acceso peatonal y vehicular con operación vía TCP/IP y "Stand Alone", Control de Luces, aire acondicionado, etc.
Conexión TCP/IP (Red LAN).
Modo de operación Stand Alone y ON-Line Capacidad de hasta 2000 usuarios.
Capacidad de hasta 4000 eventos. Lector de Tarjetas de Proximidad
Software para administración de usuarios.
Capacidad de encender luces y equipos electrónicos.
Cada dispositivo de acceso se encuentra conectado a la red y con comunicación disponible, la información se guarda en un servidor (PC). Los datos una vez en el servidor, se pueden explotar al máximo mediante reportes en Excel, páginas Web, correos electrónicos además de algunas otras versiones.
Pero si por alguna razón se pierde la comunicación entre el servidor y alguno de los dispositivos, esos tienen una memoria interna para guardar todos los eventos que ocurran, sin conexión y posteriormente enviarlos cuando la conexión se recupere.”
1.5 ESTADO DEL ARTE
Como se ha visto con anterioridad el control y el mando a distancia se ha ido desarrollando muy rápido, pero al mismo tiempo que se ha encontrado formas de controlar cosas, también se han desarrollado tecnologías para que ese control pueda ser de una manera no presencial, es decir que no necesariamente debe estar una persona para tener el control de algo y esto gracias al crecimiento de tecnologías como el desarrollo de internet, se pueden realizar todas estas acciones.
La automatización de una vivienda, aporta servicios de gestión energética, seguridad, bienestar y comunicación, y que pueden estar integrados por medio de redes interiores y exteriores de comunicación, cableadas o inalámbricas, y cuyo control goza de cierta ubicuidad, desde dentro y fuera del hogar.
En cuanto a los servicios para los discapacitados, la domótica también está realizando su trabajo, diseñando controles que se activan con la voz y con pantallas táctiles. También se han creado teléfonos que funcionan como controles para la calefacción, la alarma.
Los servicios que ofrece la domótica se pueden agrupar según cinco aspectos o ámbitos principales: 1. Ahorro energético: El ahorro energético no es algo tangible, sino un concepto al que se puede
llegar de muchas maneras. En muchos casos no es necesario sustituir los aparatos o sistemas del hogar por otros que consuman menos sino una gestión eficiente de los mismos.
o Climatización: programación y zonificación. o Administración eléctrica:
Racionalización de cargas eléctricas: desconexión de equipos de uso no prioritario
en función del consumo eléctrico en un momento dado
Gestión de tarifas, derivando el funcionamiento de algunos aparatos a horas de tarifa reducida
o Uso de energías renovables
2. Confort: Conlleva todas las actuaciones que se puedan llevar a cabo que mejoren el confort en una vivienda. Dichas actuaciones pueden ser de carácter tanto pasivo, como activo o mixtas.
o Iluminación:
Apagado general de todas las luces de la vivienda
Automatización del apagado/ encendido en cada punto de luz.
Regulación de la iluminación según el nivel de luminosidad ambiente
o Automatización de todos los distintos sistemas/ instalaciones / equipos dotándolos de
control eficiente y de fácil manejo
o Integración del portero al teléfono, o del video portero al televisor o Control vía Internet
o Gestión Multimedia y del ocio electrónicos
o Generación de macros y programas de forma sencilla para el usuario
3. Seguridad: Consiste en una red de seguridad encargada de proteger tanto los Bienes Patrimoniales y la seguridad personal.
o Simulación de presencia.
o Alarmas de detección de incendios, fugas de gas, escapes de agua, concentración de
monóxido en garajes cuando se usan vehículos de combustión.
o Alerta médica.
o Cerramiento de persianas puntual y seguro- o Acceso a Cámaras IP.
4. Comunicaciones: Son los sistemas o infraestructuras de comunicaciones que posee el hogar.
o Ubicuidad en el control tanto externo como interno, control remoto desde Internet, PC,
mandos inalámbricos (p.ej. PDA con WiFi).
5. "Telegestión y Accesibilidad": Diseño para todos, un diseño accesible para la diversidad humana, la inclusión social y la igualdad. Este enfoque constituye un reto ético y creativo. Donde las personas con discapacidad reducida puedan acceder a estas tecnologías sin temor a un obstáculo del tipo de tecnología o arquitectura.
El sistema el cual vamos a utilizar lo constituyen los siguientes módulos:
Controladores
Sensores
Actuadores Arquitectura
Desde el punto de vista de donde reside la inteligencia del sistema domótico, hay varias arquitecturas diferentes.
Arquitectura Centralizada: un controlador centralizado recibe información de múltiples sensores y, una vez procesada, genera las órdenes oportunas para los actuadores.
Arquitectura Distribuida: toda la inteligencia del sistema está distribuida por todos los módulos sean sensores o actuadores. Suele ser típico de los sistemas de cableado en bus, o redes inalámbricas.
Arquitectura mixta: sistemas con arquitectura descentralizada en cuanto a que disponen de varios pequeños dispositivos capaces de adquirir y procesar la información de múltiples sensores y transmitirlos al resto de dispositivos distribuidos por la vivienda, p.ej. aquellos sistemas basados en Zigbee y totalmente inalámbricos.
Medios de interconexión entre los dispositivos y el CPU y a su vez a internet, los cuales se mencionan a continuación:
Cableados:
o ADSL
o Fibra óptica
o Power Line Communications y X10 o Cable (coaxial y par trenzado)
Inalámbricos:
o WiFi
o GPRS
Clasificación de tecnologías de redes domésticas, aquí se muestra algunos métodos en los que se pueden interconectar los dispositivos:
Interconexión de dispositivos:
o IEEE 1394 (FireWire) o Bluetooth
o USB
o IrDA
Redes de control y automatización:
o KNX o X10 o EIB o EHS o Batibus o ZigBee
Redes de datos:
o Ethernet o Homeplug o HomePNA o WiFi
Estándares
A continuación se escriben y describen algunos de los estándares de comunicación de los dispositivos:
X10: Protocolo de comunicaciones para el control remoto de dispositivos eléctricos, hace uso de los enchufes eléctricos, sin necesidad de nuevo cableado. Puede funcionar correctamente para la mayoría de los usuarios domésticos. Es de código abierto y el más difundido. Poco fiable frente a ruidos eléctricos.
KNX/EIB: Bus de Instalación Europeo con más de 20 años y más de 100 fabricantes de productos compatibles entre sí.
ZigBee: Protocolo estándar, recogido en el IEEE 802.15.4, de comunicaciones inalámbrico.
OSGi: Open Services Gateway Initiative. Especificaciones abiertas de software que permita diseñar plataformas compatibles que puedan proporcionar múltiples servicios. Ha sido pensada para su compatibilidad con Jini o UPnP.
LonWorks: Plataforma estandarizada para el control de edificios, viviendas, industria y transporte.
Universal Plug and Play (UPnP): Arquitectura software abierta y distribuida que permite el intercambio de información y datos a los dispositivos conectados a una red.
Asociaciones
A través de sus miembros, más de 360.000 voluntarios en 175 países, el IEEE es una autoridad líder y de máximo prestigio en las áreas técnicas derivadas de la eléctrica original: desde ingeniería computacional, tecnologías biomédica y aeroespacial, hasta las áreas de energía eléctrica, control, telecomunicaciones y electrónica de consumo, entre otras.
CENELEC: Comité Europeo de Normalización Electrotécnica. La Comisión CENELEC/ENTR/e-Europe/2001-03 es la encargada de elaborar normas a nivel europeo y la organización que ha promocionado el Smart House Forum.
CEDOM: Asociación Española de Domótica. Su objetivo principal es la promoción de la Domótica. Se trata del foro nacional en el que se reúnen todos los agentes del sector en España: fabricantes de productos domóticos, fabricantes de sistemas, instaladores, integradores, arquitecturas e ingenierías, centros de formación, universidades, centros tecnológicos.
LonUsersEspaña: Asociación de usuarios de la tecnología LonWorks, siendo creada por la iniciativa de empresas líderes en los diferentes sectores de aplicación de la tecnología LonWorks (domótica, inmótica, control industrial y de transporte).
Konnex EIBEspaña: Es la Asociación nacional para la promoción del protocolo de bus KNX. KNX es una tecnología de bus normalizada para todas las aplicaciones en la Automatización y Control para viviendas y edificios. Esta tecnología está basada en más de 20 años de experiencia en el mercado gracias a sus predecesores BatiBus, EIB y EHS, ninguno de los cuales ha conseguido penetración en el mercado.
Por países
En algunos lugares como en EEUU la domótica está tan avanzada que hasta en las cadenas de supermercados se pueden adquirir componentes de bajo costo y de fácil uso para automatizar desde portones de estacionamientos hasta la comida de las mascotas.
En Chile existen pocas empresas que realicen trabajos de domótica, habiendo sólo una que se dedica al tema en forma exclusiva y completa. Dentro de los proyectos destacables de domótica en Chile podemos mencionar la automatización de las estaciones de las Líneas 4 y 4A del Metro de Santiago y varios edificios de oficinas.
En España la domótica tiene presencia mediante redes de franquicias y multitud de empresas, algunas con más de 10 años en el mercado.
del 2001 paraliza este desarrollo que recién se recupera con la expansión que se da en el área de la construcción casi tres años después. En el año 2007 se realiza la primera expo exclusiva de domótica "expo casa domótica" y primer congreso de domótica. Hasta la fecha no existe en Argentina una asociación que establezca estándares o nuclee profesionales del rubro, por lo que algunas de las empresas referentes participan de asociaciones extranjeras. [6]
2
2010
Control y monitoreo a distancia
de factores críticos
2.1 DESCRIPCIÓN GENERAL DEL SISTEMA
El sistema de control está orientado a controlar y monitorear el agua, gas y electricidad, por lo tanto va a tener tres tipos de transductores, los cuales se van a conectar al microcontrolador y este último a su vez estará funcionando también como un servidor web por medio de una conexión a internet.
Los usuarios podrán ver de forma gráfica y en un ambiente completamente amigable, las variables que se están midiendo y el usuario podrán manipular cualquiera de estas variables a su conveniencia.
[image:19.612.59.572.342.617.2]De forma general se puede ver en la figura 2.1 el diagrama a bloques del sistema de control
2.2 SISTEMA DE CONTROL
En este proyecto usaremos un sistema de control a distancia, que consta de una serie de transductores junto con un microcontrolador que estará conectado a la red de Internet para poder estar monitoreando y controlando la casa.
A continuación se dará una explicación de lo que son los sistemas de control y los diferentes tipos que hay como una introducción hacia lo que será nuestro proyecto.
Los sistemas de control según la Teoría Cibernética se aplican en esencia para los organismos vivos, las máquinas y las organizaciones. Estos sistemas fueron relacionados por primera vez en 1948 por Norbert Wiener en su obra Cibernética y Sociedad con aplicación en la teoría de los mecanismos de control. Un sistema de control está definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado, de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscados. Hoy en día los procesos de control son síntomas del proceso industrial que estamos viviendo. Estos sistemas se usan típicamente en sustituir un trabajador pasivo que controla una determinado sistema (ya sea eléctrico, mecánico, etc.) con una posibilidad nula o casi nula de error, y un grado de eficiencia mucho más grande que el de un trabajador. Los sistemas de control más modernos en ingeniería automatizan procesos en base a muchos parámetros y reciben el nombre de Controladores de Automatización Programables (PAC).
Los sistemas de control deben conseguir los siguientes objetivos:
1. Ser estables y robustos frente a perturbaciones y errores en los modelos.
2. Ser eficiente según un criterio preestablecido evitando comportamientos bruscos e irreales.
Algunas definiciones de los sistemas de control en general que son útiles para la comprensión de nuestro proyecto:
Supervisión: acto de observar el trabajo y tareas de otro (individuo o máquina) que puede no conocer el tema en profundidad.
Ejemplo 1: el llenado de un tanque usando una manguera de jardín. Mientras que la llave siga abierta, el agua fluirá. La altura del agua en el tanque no puede hacer que la llave se cierre y por tanto no nos sirve para un proceso que necesite de un control de contenido o concentración.
Ejemplo 2: Al hacer una tostada, lo que hacemos es controlar el tiempo de tostado de ella misma entrando una variable (en este caso el grado de tostado que queremos). En definitiva, el que nosotros introducimos como parámetro es el tiempo.
Estos sistemas se caracterizan por:
Ser sencillos y de fácil concepto.
Nada asegura su estabilidad ante una perturbación.
La salida no se compara con la entrada.
Ser afectado por las perturbaciones. Éstas pueden ser tangibles o intangibles.
La precisión depende de la previa calibración del sistema.
2. Sistema de control de lazo cerrado: Son los sistemas en los que la acción de control está en función de la señal de salida. Los sistemas de circuito cerrado usan la retroalimentación desde un resultado final para ajustar la acción de control en consecuencia. El control en lazo cerrado es imprescindible cuando se da alguna de las siguientes circunstancias:
- Cuando un proceso no es posible de regular por el hombre.
- Una producción a gran escala que exige grandes instalaciones y el hombre no es capaz de manejarla. - Vigilar un proceso es especialmente duro en algunos casos y requiere una atención que el hombre puede perder fácilmente por cansancio o despiste, con los consiguientes riesgos que ello pueda ocasionar al trabajador y al proceso.
Sus características son:
Ser complejos, pero amplios en cantidad de parámetros.
La salida se compara con la entrada y le afecta para el control del sistema.
Su propiedad de retroalimentación.
Ser más estable a perturbaciones y variaciones internas.
en cambios de presión que afectan a la membrana de la válvula de paso, haciendo que se abra más cuanto más cerca se encuentre del nivel máximo.
En general los sistemas de control tienen todas estas características, incluyendo el nuestro:
1. Señal de Corriente de Entrada: Considerada como estímulo aplicado a un sistema desde una fuente de energía externa con el propósito de que el sistema produzca una respuesta específica. 2. Señal de Corriente de Salida: Respuesta obtenida por el sistema que puede o no relacionarse con
la respuesta que implicaba la entrada.
3. Variable Manipulada: Es el elemento al cual se le modifica su magnitud, para lograr la respuesta deseada. Es decir, se manipula la entrada del proceso.
4. Variable Controlada: Es el elemento que se desea controlar. Se puede decir que es la salida del proceso.
5. Conversión: Mediante receptores se generan las variaciones o cambios que se producen en la variable.
6. Variaciones Externas: Son los factores que influyen en la acción de producir un cambio de orden correctivo.
7. Fuente de Energía: Es la que entrega la energía necesaria para generar cualquier tipo de actividad dentro del sistema.
8. Retroalimentación: La retroalimentación es una característica importante de los sistemas de control de lazo cerrado. Es una relación secuencial de causas y efectos entre las variables de estado. Dependiendo de la acción correctiva que tome el sistema, este puede apoyar o no una decisión, cuando en el sistema se produce un retorno se dice que hay una retroalimentación negativa; si el sistema apoya la decisión inicial se dice que hay una retroalimentación positiva. La Ingeniería en los Sistemas de Control
Los problemas considerados en la ingeniería de los sistemas de control, básicamente se tratan mediante dos pasos fundamentales como son:
1. El análisis. 2. El diseño.
En el análisis se investiga las características de un sistema existente. Mientras que en el diseño se escogen los componentes para crear un sistema de control que posteriormente ejecute una tarea particular. Existen dos métodos de diseño:
1. Diseño por análisis. 2. Diseño por síntesis.
1. Ecuaciones diferenciales, integrales, derivadas y otras relaciones matemáticas. 2. Diagramas en bloque.
3. Gráficas en flujo de análisis.
Los diagramas en bloque y las gráficas de flujo son representaciones gráficas que pretenden el acortamiento del proceso correctivo del sistema, sin importar si está caracterizado de manera esquemática o mediante ecuaciones matemáticas. Las ecuaciones diferenciales y otras relaciones matemáticas, se emplean cuando se requieren relaciones detalladas del sistema. Cada sistema de control se puede representar teóricamente por sus ecuaciones matemáticas. El uso de operaciones matemáticas es patente en todos los controladores de tipo P, PI y PID, que debido a la combinación y superposición de cálculos matemáticos ayuda a controlar circuitos, montajes y sistemas industriales para así ayudar en el perfeccionamiento de los mismos.
2.2.1 Sistema de control a distancia.
Toda la información anterior aplica para lo que será nuestro proyecto, un sistema de control a distancia, que es lo mismo que un sistema de control, solo con la gran variante de que para controlarlo no necesitaremos estar presencialmente en el lugar donde se encuentra el sistema, ya que debido a que éste va a estar conectado a internet vamos a poder controlarlo desde cualquier parte del mundo donde se tenga acceso a internet.
Eso no quiere decir que vaya a ser un sistema de control más endeble o con menor precisión, será un sistema de control igual de robusto, eficaz y seguro que cualquier otro sistema de control el cual se tenga que monitorear y operar presencialmente.
A continuación se muestra un diagrama a bloques de lo que será nuestro sistema de control:
[image:23.612.73.518.538.661.2]
Lo que se plantea en este proyecto es recrear un sistema integrado de aplicaciones electromecánicas de control y gestión, con el objetivo de generar un ahorro energético, una mejora de la seguridad y mayor confort para usuario.
Cuando nos ausentamos de casa siempre es bueno poseer un sistema que se encargue de administrar el encendido, apagado o control de la energía eléctrica y con el que podíamos monitorear y permitirle a nuestro sistema trabajar de manera autónoma.
Podemos tomar en cuenta diversas situaciones que nos lleven a implementar el sistema que proponemos, con el fin que se mencionó en un principio que es monitorear y controlar tanto el consumo, fallas o alguna disparidad que al consumo de energía eléctrica se refiera, situaciones como:
o Dejar las lámparas encendidas toda una noche hasta el amanecer para que se apaguen solas. Por
lo tanto, una de las acciones que realizaremos desde nuestro control central de iluminación será la de disponer o no de las luminarias exteriores.
o Si decidimos salir una noche y nuestra idea es que la casa no quede a oscuras, está bien que las
luces exteriores queden encendidas y que se apaguen solas al amanecer. Eso significará que nuestro circuito será muy útil para el ahorro energético.
o Otro punto que hay que tomar en cuenta es la seguridad. Para evitar que mientas nos
ausentemos de casa, ésta se vea sorprendida por la delincuencia, hacemos uso de la simulación de presencia, que se refiere a ver movimientos dentro de una casa, movimientos que están acompañados por encendidos y apagados de luces de manera aleatoria. Esta rutina puede incluir también a las luminarias del exterior, con el fin de aparentar que la casa no está sola en ese momento.
o En el caso de que en el monitoreo se presente alguna disparidad, tendremos la facilidad de
apagar el sistema eléctrico para evitar consecuencias.
o Si de ahorro hablamos, podemos hacer una comparativa cada determinado tiempo con el fin de
tener la noción y control del consumo en ese determinado tiempo y así tener un rango de consumo.
2.3 DESCRIPCIÓN DE LOS TRANSDUCTORES
2.3.1 Relevadores
Uno de los dispositivos potencialmente importante en este sistema es el Relevador, con el monitorearemos la corriente eléctrica; el Relevador es un dispositivo electromecánico, que funciona como un interruptor controlado por un circuito eléctrico en el que, por medio de una bobina y un electroimán, se accionan contactos lo cuales permiten abrir o cerrar otros circuitos eléctricos independientes.
Una introducción un poco más hacia lo que es un relevador, como funciona, cuáles son sus características, y en que se emplean, nos dará un panorama más amplio para poder justificar el empleo del relevador en este proyecto.
Anteriormente se mencionó de manera general lo que es un relevador. Existen varios tipos de relevadores cada uno de ellos con diferentes características dependiendo de la implementación que se le dé, de la intensidad admisible por los mismos, tipo de corriente de accionamiento, tiempo de activación y desactivación, se le da cierta clasificación.
Relevador de estado sólido
Es usado generalmente para aplicaciones donde se presenta un uso continuo de los contactos del relevador que en comparación con un relevador convencional generaría un desgaste mecánico considerable.
Relevador de corriente alterna
Cuando se excita la bobina de un relevador con corriente alterna, el flujo magnético en el circuito magnético, también es alterno, produciendo una fuerza pulsante, con frecuencia doble, sobre los contactos. Es decir, los contactos de un relevador conectado a la red, en algunos lugares varían, éste hecho se aprovecha, como un activador a distancia. En un relevador de corriente alterna se modifica la resonancia de los contactos para que no oscilen.
Relevador de láminas
Este tipo de relevador se utilizaba para discriminar distintas frecuencias, mayormente utilizado en sistemas de telecontrol.
Relevadores electromecánicos Relevadores de núcleo móvil:
Relevador tipo “reedo” de “lengüet”:
Están constituidos por una ampolla de vidrio, con contactos en su interior, montados sobre láminas delgadas de metal. Estos contactos conmutan por la excitación de una bobina, que se encuentra alrededor de la mencionada ampolla.
Relevadores polarizados o biestables:
Se componen de una pequeña armadura, soldada a un imán permanente. El extremo inferior gira dentro de los polos de un electroimán, mientras que el otro lleva una cabeza de contacto. Al excitar el electroimán, se mueve la armadura y provoca el cierre de los contactos. Si se polariza al revés, el giro será en sentido contrario, abriendo los contactos o cerrando otro circuito.
Relevadores de tipo armadura
Un electroimán se mueve de un lado al otro de una armadura al ser excitado, cerrando o abriendo los contactos dependiendo de si es NA o NC.
Este último es en el que nos enfocaremos para el proyecto funcional.
Un relevador electromecánico es capaz de controlar un circuito de salida de mayor potencia que el de entrada, por lo que podemos decir que funciona como un amplificador eléctrico.
Un relevador electromecánico se clasifica de manera general en dos:
Abierto (NO): Este tipo de relevadores al recibir la señal, cierra el circuito, y por ejemplo enciende algo; es decir; conectan el circuito cuando el relevador es activado; el circuito se desconecta cuando el relevador está inactivo.
Cerrado (NC): Al contrario, da la señal de abrir el circuito; desconectan el circuito cuando el relevador es activado; el circuito se conecta cuando el relevador está inactivo. Estos contactos se utilizan para aplicaciones en las que se requiere que el circuito permanezca cerrado hasta que el relevador sea activado.
Podemos ver un caso de relevadores en bases interface que son controlado por módulos digitales programables que permiten crear funciones de temporización y contador. Con estos sistemas los relevadores pueden actuar de forma programada e independiente lo que supone grandes ventajas en su aplicación aumentando su uso en aplicaciones sin necesidad de estar físicamente presente.
Figura 2.3.1 Diagrama general de un relevador
2.3.2 Caudalímetro
Los Caudalímetro o medidores por desplazamiento positivo operan atrapando un volumen unitario y conocido de líquido (Vu), desplazándolo desde la entrada hasta la salida, y contando (N) el número de volúmenes desplazados en un tiempo determinado (t).
[image:27.612.170.446.141.382.2]Se conocen con el nombre genérico de contadores porque cuentan el volumen de líquido, independientemente del tiempo transcurrido. Si se desea obtener la medida en forma de caudal (Q), hay que incluir la unidad de tiempo, teniendo entonces que:
Figura 2.3.2.b; “Fórmula del caudal”
Dependiendo de las unidades utilizadas se tendrá la medida de caudal en: litros/min, m3/h, m3/día, m3/mes, etc. La lectura se realiza por medio de un sistema de transmisión mecánica desde el interior del contador hasta el exterior, en cuyo final se encuentra un conjunto de engranajes que hacen mover un contador totalizador de caudal.
Con los contadores se obtiene la medida de forma directa, sin tener que recurrir a ningún tipo de cálculo. Existen varios tipos de contadores, un ejemplo es el de ruedas ovales que muestra la Figura.
Figura 2.3.2.c; “Contador de ruedas ovales”
La secuencia de medida se realiza siguiendo el orden de izquierda a derecha de la forma que se describe a continuación:
• En el primer dibujo se está llenando la cámara de medida «M» situada entre la rueda oval derecha y el chasis del medidor.
• En el segundo dibujo ha quedado atrapado un volumen conocido de líquido entre la misma rueda oval y la carcasa.
• En el tercer dibujo se desplaza el líquido desde la entrada hacia la salida del contador.
La tabla siguiente muestra las principales ventajas y limitaciones que tienen estos tipos de medidores de volumen o caudal:
Tabla 2.3.2.4; “Tabla de ventajas y desventajas caudalímetros”
Caudalímetro Digital:
El caudalímetro digital es un dispositivo electrónico que permite recibir los pulsos procedentes de un contador de agua tipo Woltman dotado de emisor de pulsos y que, una vez procesados, presenta el caudal instantáneo de agua a través de una pantalla digital. El caudalímetro digital es de gran utilidad en todo tipo de instalaciones donde se requiera una visualización del caudal instantáneo de agua circulante, como pueden ser tuberías de suministro de agua, control del caudal de grupos de bombeo, consumo de agua de equipos o sectores. El diseño del circuito electrónico y la simplicidad del sistema de medida permiten obtener una solución simple y fiable para la determinación del caudal instantáneo de una conducción. Existen dos versiones disponibles en función del tipo de emisor del contador Woltman: Caudalímetro digital para emisor de pulsos y caudalímetro digital para fotodiodo. Se recomienda este último para instalaciones en las que se precise una respuesta más rápida y exacta de la lectura del caudal instantáneo.
Ventajas Limitaciones
Buena exactitud y amplio rango de medida. Caro, especialmente en grandes tamaños.
Muy buena repetibilidad. Alta pérdida de carga.
Apto para fluidos con muy alta viscosidad, admitiendo grandes cambios en la misma.
No apto para fluidos abrasivos o sucios. En este último caso necesitan un filtro previo.
Lectura local directa en m3. La lectura se puede transmitir por medio de un sistema de
pulsos.
Las partes móviles tienen muy poca tolerancia entre ellas para evitar fugas de líquido. Por
tanto están expuestas a bloquearse.
No necesita alimentación eléctrica. Limitan el caudal de paso a través suyo.
2.3.3 Válvulas
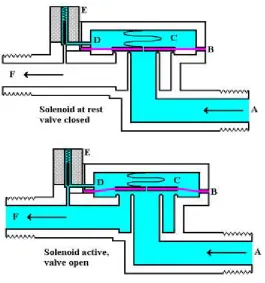
Para implementar las válvulas de apertura y cierre tanto como del agua como del gas, vamos a usar las llamadas electroválvulas.
La electroválvula es una válvula electromecánica, diseñada para controlar el flujo de un fluido a través de un conducto como puede ser una tubería. La válvula está controlada por una corriente eléctrica a través de una bobina solenoidal.
No se debe confundir la electroválvula con válvulas motorizadas, que son aquellas en las que un motor acciona el cuerpo de la válvula.
Clases y funcionamiento
Una electroválvula tiene dos partes fundamentales: el solenoide y la válvula. El solenoide convierte energía eléctrica en energía mecánica para actuar la válvula.
Existen varios tipos de electroválvulas. En algunas electroválvulas el solenoide actúa directamente sobre la válvula proporcionando toda la energía necesaria para su movimiento. Es común que la válvula se mantenga cerrada por la acción de un muelle y que el solenoide la abra venciendo la fuerza del muelle. Esto quiere decir que el solenoide debe estar activado y consumiendo energía mientras la válvula deba estar abierta.
También es posible construir electroválvulas biestables que usan un solenoide para abrir la válvula y otro para cerrar o bien un solo solenoide que abre con un pulso y cierra con el siguiente.
Las electroválvulas pueden permanecer en reposo o normalmente cerradas lo cual quiere decir que cuando falla la alimentación eléctrica quedan cerradas o bien pueden ser del tipo abiertas en reposo o normalmente abiertas que quedan abiertas cuando no hay alimentación.
Hay electroválvulas que en lugar de abrir y cerrar lo que hacen es conmutar la entrada entre dos salidas. Este tipo de electroválvulas a menudo se usan en los sistemas de calefacción por zonas lo que permite calentar varias zonas de forma independiente utilizando una sola bomba de circulación.
Figura 2.3.3 ”Electroválvula”
La figura 2.3.3 muestra el funcionamiento de este tipo de válvula. En la parte superior vemos la válvula cerrada. El agua bajo presión entra por A, B es un diafragma elástico y tiene encima un muelle que le empuja hacia abajo con fuerza débil. La función de este muelle no nos interesa por ahora y lo ignoramos ya que la válvula no depende de él para mantenerse cerrada. El diafragma tiene un diminuto orificio en el centro que permite el paso de un pequeño flujo de agua. Esto hace que el agua llene la cavidad C y que la presión sea igual en ambos lados del diafragma. Mientras que la presión es igual a ambos lados, vemos que actúa en más superficie por el lado de arriba que por el de abajo por lo que presiona hacia abajo sellando la entrada. Cuanto mayor sea la presión de entrada, mayor será la fuerza con que cierra la válvula.
Ahora estudiamos el conducto D. Hasta ahora estaba bloqueado por el núcleo del solenoide E al que un muelle empuja hacia abajo. Si se activa el solenoide, el núcleo sube y permite pasar el agua desde la cavidad C hacia la salida con lo cual disminuye la presión en C y el diafragma se levanta permitiendo el paso directo de agua desde la entrada A a la salida F de la válvula. Esta es la situación representada en la parte inferior de la figura.
De esta explicación se deduce que este tipo de válvula depende para su funcionamiento de que haya mayor presión a la entrada que a la salida y que si se invierte esta situación entonces la válvula abre sin que el solenoide pueda controlarla.
Este tipo de válvulas se utilizan muy comúnmente en lavadoras, lavaplatos, riegos y otros usos similares. Un caso especialmente interesante del uso de estas válvulas es en los calentadores de agua de depósito. En los calentadores de agua de demanda, el agua se calienta según va pasando por el calentador en el momento del consumo y es la propia presión del agua la que abre la válvula del gas pero en los calentadores de depósito esto no es posible ya que el agua se calienta mientras está almacenada en un depósito y no hay circulación. Para evitar la necesidad de suministrar energía eléctrica la válvula del gas es una válvula de este tipo con la válvula piloto controlada por un diminuto solenoide al que suministra energía un termopar bimetálico que saca energía del calor del agua.
Las electroválvulas también se usan mucho en la industria para controlar el flujo de todo tipo de fluidos.
2.4 DESCRIPCIÓN DEL MICROCONTROLADOR
Hay una gama muy interesante de microcontroladores que nos pueden servir en la elaboración del proyecto, por ejemplo: Microchip, que es un circuito muy sencillo y por lo tanto es relativamente barato; sin embargo por cuestiones de operatividad, nos decidimos a utilizar el microcontrolador de Freescale MCN52259 porque nos ofrece las siguientes ventajas:
Es una herramienta de desarrollo de bajo costo para Ethernet.
Es una plataforma reconfigurable de desarrollo modular que permite al programador diseño de aplicaciones distribuido en forma de tareas, manejo de dispositivos lógicos y físicos mediante la implementación de controladores.
Es un sistema incrustado muy rápido en tiempo y ejecución debido a sus herramientas y software.
Cuenta con los módulos para tener una conexión a internet sin necesidad de una PC
Sus características son:
Controlador Fast Ethernet (FEC)
Interfaz externo Mini-Bus FlexBus
Ethernet 10/100 baseT con DMA
Integrado, BDM Open-Source
factor de forma pequeño (59mm x 90mm) de serie con sistema de torre de Freescale
TWR-SER Características Módulo Periférico:
RS232 y RS485
Ethernet
CAN
host USB de apoyo, dispositivos y modos OTG TWR-ELEV Características:
Soporta interfaces de comunicación externa
Incluye un circuito de regulación de la potencia con bus normalizada
Cuatro borde de la tarjeta PCI Express conectores
[image:33.612.179.439.387.673.2] Dos conectores de 80-pines en el exterior para apoyar la depuración o la expansión de módulo LCD
Otra gran ventaja es que se le pueden adicionar tarjetas si es que necesitáramos de algún otro módulo para cierta aplicación como la tarjeta que se mostró anteriormente.
2.5 DESCRIPCIÓN DEL SOFTWARE
Para el desarrollo de este proyecto utilizaremos dos software, uno que aplicaremos para el diseño de la página web y otro que será para la programación del micro-controlador.
Para el Micro-controlador utilizaremos el entorno de desarrollo integrado (IDE) de los microcontroladores de Freescale, que es el CodeWarrior.
El CodeWarrior es software que se ejecuta en una serie de sistemas embebidos
Este software está enfocado para la programación de micros pero también tiene existencia para Macintosh, Microsoft Windows, Linux, Solaris, PlayStation 2, Nintendo Game Cube, Nintendo DS, Wii, Palm OS, Symbian OS, E incluso para BeOS.
Nosotros la parte que utilizaremos es la implementación de C, C + +, que es en los lenguajes que programaremos al microcontrolador, además de código e instrucciones propias del sistema operativo MQX.
3
2010
I P N
ESIME ICE
Control y monitoreo a distancia
de factores críticos
DISPOSITIVOS Y
3.1 Dispositivo Central
Cada uno de los dispositivos antes mencionados son parte importante para el control de acceso, sin embargo, existe un dispositivo, el cual, es la esencia de todo el sistema a diseñar y éste es una tarjeta de desarrollo que tiene la capacidad de controlar los dispositivos anteriores e inclusive tiene la capacidad de conectarse al internet y dar servicios tales como informar quién ha ingresado a la casa o quien desea entrar.
El nombre comercial de ésta tarjeta de desarrollo, es MCF52259, este dispositivo tiene la capacidad de trabajar con un sistema llamado MQX RTOS (Real Time Operating System MQX, Sistema Operativo en Tiempo Real MQX), significa que este sistema ha sido diseñado para un solo procesador, un multiprocesador, y como procesador distribuido de los sistemas embebidos en tiempo real.
MQX incluye bibliotecas de tiempo de ejecución de funciones que los programas usan para convertirse en aplicaciones multitareas en tiempo real. Las principales características son su tamaño escalable, arquitectura orientada a componente y su fácil uso. Como MQX soporta aplicaciones de multiprocesador, puede ser usado con productos embebidos de entrada o salida para redes, comunicaciones de datos y gestión de archivos.
3.1.1 Sistema Operativo en Tiempo Real MQX.
La tendencia tecnológica de los últimos años se ha inclinado hacia desarrollar dispositivos que integran el hardware con el software de manera directa. Al conjunto de estos dispositivos con el software se les llama sistemas embebidos. A la par de este desarrollo y en busca de un mayor aprovechamiento de los recursos del hardware, se desarrollaron los sistemas operativos en tiempo real (RTOS por sus siglas en inglés, Real Time Operating System); ofreciendo también una forma más fácil de adaptar código entre distintas plataformas de microcontroladores.
3.1.2 Diseño esencial del sistema operativo MQX
[image:37.612.105.511.190.454.2]La constitución esencial del sistema operativo MQX se basa en un núcleo llamado kernel, el cual se compone de los componentes esenciales del sistema. Estos componentes no son opcionales y cada vez que se inicia la aplicación que se ejecuta en el microcontrolador estos módulos son iniciados, a continuación se muestra una figura en la que se ilustra cómo está constituido el kernel del MQX.
Figura 3.1.2. Composición del kernell del MQX.
Una vez que se ha cargado el kernel del sistema operativo, este tiene la función de administrar el uso de los recursos físicos del sistema, esto permite elaborar aplicaciones más complejas, ya que elimina el limitante de tener que codificar linealmente al poder controlar varias tareas en una sola aplicación y todas estén ejecutándose en paralelo o incluso en otro microcontrolador. La función de sus módulos es la de coordinar, sincronizar y comunicar información entre aplicaciones que se estén ejecutando paralelamente.
3.1.3 Módulos en el sistema operativo MQX
Debido a que el núcleo de un sistema operativo en tiempo real es muy básico y solo usa lo esencial, se construye el sistema en base al kernel, de esta forma se asegura la eficiencia del sistema final. Para seguir construyendo el sistema se tienen tres tipos de módulos que se pueden agregar: las tareas, las funciones y los controladores.
Utilidades
Inicialización
Servicios de la memoria del nùcleo Creación
automátic a de Tareas Programación
RR y FIFO Programación de
cola de tareas
Semáforos Ligeros
Errores en las tareas
En una analogía directa con el entorno de software que conocemos, una tarea es una aplicación (programa) que interactúa de manera directa con el usuario, pero la diferencia radica en cómo se estratifican los dos sistemas, tal como se muestra en la siguiente figura.
Figura 3.1.3 a; Comparación entre un sistema operativo en tiempo real y el sistema operativo convencional.
Como se mencionó anteriormente, una tarea no se ejecuta todo el tiempo, el sistema operativo va ejecutando las tareas según sea necesario y según sus prioridades, tal como se ilustra,
Figura 3.1.3.b; Operación de las tareas
INTERNET TRANSDUCTORES
Dispositivo con acceso a Internet Microcontrolador
RTOS
Sistema
operativo
Hardware del Sistema
3.2 CONJUNTO DE BIBLIOTECAS RTCS.
Dentro del sistema operativo MQX, se incluye todo un conjunto de bibliotecas llamado RTCS que por sus siglas en inglés significa Stack (Pila) de Comunicaciones en tiempo real (Real Time Communications Stack). El RTCS incluye todas las librerías necesarias para configurar y montar servicios de red, desde la capa física hasta capa de aplicación, está basado en los protocolos que soporta (véase figura 2.12).
Diagrama 3.2.c; Proceso para crear un socket
Definir protocolos. Cambiar parámetros de creación
Crear RTCS
Inicializar interfaces
Agregar las interfaces de dispositivos
Asociar la dirección IP a las interfaces
Agregar las puertas de enlace
Habilitar el registro de RTCS
3.3 SERVIDOR WEB
Como característica adicional al conjunto de librerías de comunicaciones RTCS de MQX, se incluye código que se puede emplear para implementar un servidor web (servidor HTTP); el cual funciona de la misma forma que el modelo tradicional cliente-servidor, las páginas que puede servir son aquellas que son guardadas como código dentro del microcontrolador en el sistema TFS.
El método de inicialización del servidor web sigue el diagrama mostrado en la figura.
Diagrama 3.2.d; Proceso de inicialización del servidor WEB. Asociar la dirección IP a
las interfaces Agregar las puertas
de enlace
Habilitar el registro de RTCS
Asociar estructuras:
3.4 CONTROLADOR GPIO
Dentro del microcontrolador cada pin puede ser manejado hasta en cuatro modos, esto porque en cada pin puede tener hasta tres subsistemas y la forma general en la que se manejan los últimos pines consisten en controlar el nivel de voltaje en el pin específico, estos niveles de voltaje corresponden a los especificados como “1” y ”0” lógicos.
El modo general de control de los puertos se conoce como GPIO (General Purpose Input/Output, Entrada Salida de Propósito General), este controlador está implementado en MQX de manera nativa, y se implementa mediante el estándar ANSI de entrada salida formateada; para su configuración se requiere una estructura donde se indiquen los pines físicos a controlar.
A diferencia de otros microcontroladores, la opción representada por MQX es el agrupamiento de pines dentro de estas estructuras sin que necesariamente pertenezcan al mismo grupo físico de pines.
La implementación del sistema solo nos exige el control de un motor y el monitoreo de presencia para habilitar dispositivos y mejorar más eficientemente el procesamiento en las tareas, por lo anterior solo es necesario configurar dos pines para tal propósito, y por consiguiente dos estructuras.
3.5
AMBIENTE DE DESARROLLO.
Para el desarrollo de software se empleó el ambiente de desarrollo que provee el fabricante del microcontrolador, en este caso se trata del IDE (Integrated Development Enviroment, Entorno de Desarrollo Integrado) CodeWarrior el cual permite la creación, compilación y descarga de código para el microcontrolador empleado.
Figura 3.5.a; Imagen de IDE CodeWarrior.
El desarrollo de páginas web en este programa es muy intuitivo, ya que tiene una característica principal, esta es que al tiempo en que se va escribiendo el código, se van observando los cambios que se verán en el navegador, además de que nos ofrece una gran variedad de herramientas para facilitar el desarrollo e implementación del código.
A continuación se muestra una imagen del entorno de Visual Studio 2010:
[image:43.612.87.530.417.691.2]3.6 Introducción a los Lenguajes de Programación (C, HTML, Java
Script, AJAX)
Para poder tener el control del dispositivo central, así como el control de los dispositivos auxiliares, es necesario conocer algunos lenguajes de programación, tales como, C, HTML, AJAX y Java Script.
3.6.1 Lenguaje HTML
HTML (HyperTextMarkupLanguage) es un lenguaje muy sencillo que permite describir hipertexto, es decir, texto presentado de forma estructurada y agradable, con enlaces (hyperlinks) que conducen a otros documentos o fuentes de información relacionadas, y con aplicaciones multimedia, es decir con audio y video. La descripción se basa en especificar en el texto la estructura lógica del contenido, tal como, los títulos, párrafos de texto normal, enumeraciones, definiciones, citas. Así como los diferentes efectos que se quieren dar, para ello hay que especificar los lugares del documento donde se debe poner cursiva, negrita, o un gráfico determinado y dejar que luego la presentación final de dicho hipertexto se realice por un programa llamado navegador.
Este lenguaje no describe la apariencia del diseño de un documento sino que ofrece a cada plataforma que le dé formato según su capacidad y la de su navegador, por ejemplo, tamaño de la pantalla, fuentes que tiene instaladas, aplicaciones, entre otros. Por ello y para no tener complicaciones, no se debe diseñar los documentos basándose en como lucen en un navegador, sino que se debe concentrar en proporcionar un contenido claro y bien estructurado que resulte fácil de leer y entender.
HTML tiene dos ventajas que lo hacen un lenguaje muy importante a la hora de diseñar una página web: Su compatibilidad y su facilidad de aprendizaje, debido al reducido número de etiquetas que usa. Sin embargo, el tamaño de los documentos HTML es importante, ya que los que son demasiado grandes tardan en cargarse, al igual que la cantidad de aplicaciones multimedia que ésta posea.
3.6.2 Lenguaje Java Script
Java Script es algo muy distinto de Java. Ambos lenguajes están dirigidos a los objetos, pero mientras Java se usa para crear aplicaciones autónomas, o applet, JavaScript se interpreta con el código HTML (del que forma parte integrante, y sin el cual no puede existir, sin necesidad de máquinas virtuales o conocimientos profundos de modelos orientados a los objetos).
Tales lenguajes tienen en común parte de la sintaxis y de su estructura, por tanto, se dirige a los creadores de sitios web que pretende obtener resultados apreciables sin necesidad de aprender complejos lenguajes de programación.
JavaScript establece una jerarquía de objetos, que permite definir con precisión propiedades que de otro modo resultarían indefinibles. Los principales objetos en la mayoría de los navegadores son: ventanas, documentos, historial, localizaciones y navegador. Dichos objetos están comunicados entre sí por relaciones estructurales de la siguiente forma:
Etiqueta 3.6.2.a; Muestra la relación entre objetos de Java Script.
JavaScript se compone de elementos de programación como: argumentos, gestores de eventos, funciones, literales, expresiones, métodos, objetos, operadores, propiedades, instrucciones, valores y variables.
En la práctica, JavaScript permite el enriquecimiento de documentos HTML con script más o menos complejos y más o menos útiles. La apertura de ventanas independientes de la principal del navegador es una de las peculiaridades de JavaScript, que, además de ofrecer ejemplos prácticos, permite definir y profundizar elementos conceptuales. Éste es el código HTML necesario para abrir una ventana independiente de la principal del browser:
Etiqueta 3.6.2.b; Muestra el código para abrir una ventana nueva.
Iniciar el Servidor
Configuración en la estructura creada
Asociar estructuras:
Para entender este script es necesario introducir el método open(). Los métodos son funciones específicas asociadas a los objetos, de los cuales piden la elaboración sin definir las características. Los métodos se reconocen fácilmente por dos paréntesis que siguen a la palabra.
OnClick es, sin embargo, uno de los principales gestores de eventos, y se usa para iniciar o llamar a un script. Se usa con la etiqueta <INPUT> de tipo interruptor, con etiqueta<A>, con los interruptores de reset y de envío, y por fin con las casillas de control. Como respuesta a un click del ratón, se ejecuta el script especificado por el gestor de eventos, en este caso window.open. [14].
3.6.3 Contraseñas en Java Script
La protección de una página Web con contraseña se da normalmente a través de un CGI (Common Gateway Interface), que le pide al visitante la palabra de orden y el login de acceso. Para la implementación y la configuración de un CGI se necesitan conocimientos avanzados, eso sin contar con que muchos servidores gratuitos no permiten, por razones de seguridad, depositar los propios CGI u otros programas residentes en los propios discos duros. JavaScript simplifica este procedimiento y permite programar una contraseña de acceso seleccionado a un sitio Web o sólo a algunas de sus páginas. Hay que admitir desde este momento que está solución no ofrece las mismas garantías de seguridad que una contraseña creada por un programa CGI, que sigue siendo, sin duda, la mejor solución, sin embargo, la potencialidad del lenguaje Java Script permite varias soluciones, más o menos eficaces, para la creación de contraseñas en páginas Web.
3.6.4 Lenguaje C
El lenguaje de programación C es de propósito general que ofrece control de flujo y estructuras sencillas y un buen conjunto de operadores. Es un lenguaje de medio nivel pero con muchas características de bajo nivel, no está especializado en ningún tipo de aplicación. Esto lo hace un lenguaje potente, con un campo de aplicación ilimitado y sobre todo, se aprende en poco tiempo.
No proporciona mecanismos para tratar tipos de datos que no sean los básicos, debiendo ser el programador el que los desarrolle. Esto permite que el código generado sea muy eficiente y de ahí el éxito que ha tenido como lenguaje de desarrollo de sistemas. No proporciona otros mecanismos de almacenamiento de datos que no sea el estático y no proporciona mecanismos de entrada ni salida. Ello permite que el lenguaje sea reducido y los compiladores de fácil implementación en distintos sistemas. Por el contrario, estas carencias se compensan al agregar funciones de librería para realizar todas estas tareas, que normalmente dependen del sistema operativo. [16]
3.6.4.1 Características
Sensible a mayúsculas y minúsculas: sum y Sum.
Espacios en blanco.
Sentencias terminan con un punto y coma.
Bloques delimitados entre llaves.
Elementos de un programa:
o Muy pocas palabras reservadas. o Funciones de librería estándar.
o Variables y funciones definidas por el programador.
3.6.4.2 Uso de las funciones
La definición de una función tiene la estructura:
Etiqueta 3.6.4.2 Estructura de función
Una función se invoca proporcionando valores a los argumentos de la llamada.
Los argumentos se pasan siempre por valor.
El valor se devuelve por medio de return().
Los procedimientos son funciones de tipo void.
El control del número y tipo de argumentos es mínimo.
Las funciones en C admiten recursividad
tipo identificador (argumentos ...) {
...
Cuerpo de la función ...