ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELECTRICA UNIDAD PROFE“IONAL ADOLFO LÓPEZ MATEO“
“ANÁLISIS DE LAS CORRIENTES Y VOLTAJES
ARMÓNICOS DE UN MOTOR DE INDUCCIÓN
TRIFÁSICO ALIMENTADO POR UN
INVERSOR”
T E S I S
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO ELECTRICISTA
PRESENTAN:
JORGE PÉREZ CARRILLO CESAR ARAMIS VELASCO MORALES
ASESOR:
DR. ALFREDO REYES ROSARIO
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELECTRICA
UNIDAD PROFESIONAL "ADOLFO LÓPEZ MATEOS"
TEMA DE TESIS
QUE PARA OBTENER EL TITULO DE INGENIERO ELECTRICISTA
セ
POR LA OPCIÓN DE TITULACIÓN TESIS COLECTIVA y EXAMEN ORAL INDIVIDUAL DEBERA(N) DESARROLLAR C. JORGE PÉREZ CARRILLO
C. CESAR ARAMIS VELASCO MORALES
"ANÁLISIS DE LAS CORRIENTES Y VOLTAJES ARMÓNICOS DE UN MOTOR DE INDUCCIÓN TRIFÁSICO ALIMENTADO POR UN INVERSOR."
ANALIZAR EL FUNCIONAMIENTO DE UN MOTOR DE INDUCCIÓN TRIFÁSICO CUANDO ESTA SOMETIDO A CORRIENTES Y VOLTAJES ARMÓNICOS Y ES ALIMENTADO CON UNA FUENTE SINUSOIDAL O CON UN INVERSOR PWM.
セ INTRODUCCIÓN.
セ ASPECTOS TEÓRICOS DEL MOTOR DE INDUCCIÓN TRIFÁSICO.
セ ASPECTOS TRIFÁSICOS DE LOS INVERSORES.
セ CONSIDERACIONES TEÓRICAS DE LOS ARMÓNICOS.
セ REDUCCIÓN DE LA POTENCIA DE LOS MOTORES DE INDUCCIÓN ALIMENTADO POR FUENTE SINUSOIDAL.
セ REDUCCIÓN DE LA POTENCIA DE LOS MOTORES DE INDUCCIÓN ALIMENTADO POR INVERSORES.
セ COMPARACIÓN POR MEDIO DEL MODELO DESARROLLADO EN MATLAB/SIMULINK.
セ CONCLUSIONES.
MÉXICO D.F., 16 DE AGOSTO 2012.
i
AGRADECIMIENTOS
JORGE PEREZ CARRILLO
Mi gratitud, principalmente está dirigida a mis padres; ISABEL CARRILLO ROMERO Y SANTOS DONATO PÉREZ ROMERO, por haberme dado la existencia y permitido llegar al final de la carrera enseñándome a seguir hacia adelante, por su gran corazón y capacidad de entrega, pero sobre todo por enseñarme a ser responsable, gracias a ellos me he convertido en el hombre que soy ahora.
A mis hermanos OSCAR PÉREZ CARRILLO, ING. ALBERTO PÉREZ CARRILLO Y LEONARDO PÉREZ CARRILLO por su convivencia y apoyo incondicional a través de mi vida.
Igualmente a mi asesor de tesis el DR. ALFREDO REYES ROSARIO, sus comentarios, apreciaciones y críticas hicieron que esta tesis resultara ser mil veces mejor que lo que se proyectaba originalmente. Gracias por darme un amplio margen de libertad en el proceso investigativo y en la escritura. Por ser quien me ha orientado en todo momento en la realización de este proyecto que enmarca el último escalón de mi formación profesional hacia un futuro prospero.
A mis profesores que a lo largo de la carrera de Ing. eléctrica me brindaron sus conocimientos y experiencias.
A todas las personas amigos y compañeros que me he encontrado en el camino y que me han brindado consejos muy importantes, pero sobre todo al ING. PEDRO SANDOVAL MARTÍNEZ, al ING. LUIS HERNÁNDEZ BASUALDO, a CESAR ARAMIS VELASCO MORALES y a FABIOLA ELIZABETH HERRERA MORENO que siempre me han brindado su apoyo incondicional a través del tiempo en que nos hemos conocido y hemos compartido tantas experiencias tanto buenas como malas.
Al INSTITUTO POLITÉCNICO NACIONAL y a la ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA por darme la oportunidad de forjar mi futuro como Ing. electricista.
Cada uno de ustedes, directa e indirectamente, ha sido parte fundamental en la realización de esta tesis, por lo tanto, son responsables de ella.
ii
VELASCO MORALES CESAR ARAMIS
Quiero agradecer desde lo más profundo de mi corazón a mis padres TOMAS VELASCO RAMIREZ y SILVIA MORALES ROJAS, por todo lo que han representado en mi vida, no solo por el hecho de haberme concebido dentro de un hogar lleno de amor y ternura, sino por el apoyo incondicional a lo largo de esta vida. Por todos los momentos felices que me han dado y por estar conmigo en los momentos difíciles y sobre todo por luchar cada día de su vida para que yo no careciera de nada.
A mis hermanos MARCO ANTONIO VELASCO MORALES y CARMEN ZORAYDA VELASCO MORALES por compartir toda una vida conmigo, por soportarme y apoyarme incondicionalmente.
A mis abuelos maternos CATALINO MORALES Y CARMEN ROJAS y a mis abuelos paternos PORFIRIO VELASCO (†) Y FELICITAS RAMIREZ (†), por luchar toda su vida para asegurar un mejor futuro para los suyos, por todo el conocimiento y sabiduría que me otorgaron a lo largo de su vida.
A mis TIOS Y PRIMOS.
A mis profesores por todos los conocimientos, valores y enseñanzas que me han dado, ellos son parte importante del profesionista que soy ahora.
A mi asesor el DR. ALFREDO REYES ROSARIO, por su asesoría y valiosa ayuda en la culminación de este ciclo de mi vida.
Y sobre todo un agradecimiento a todos mis amigos algunos han tomado otro camino, otros mas están presentes ahora en mi vida, pero todos son importantes para mi, todos me han ayudado a crecer y he aprendido muchas cosas de ellos, ellos han sido parte esencial del hombre en que me he convertido ahora. Pero en especial al ING. PEDRO SANDOVAL MARTINEZ, al ING. LUIS HERNADEZ BASUALDO y JORGE PEREZ CARRILLO por acompañarme y estar conmigo en las buenas y las malas en este camino llamado Escuela Superior de Ingeniería Mecánica y Eléctrica.
iii
RESUMEN
El presente trabajo trata sobre la manera en que armónicos afectan a los motores de inducción.
Los motores de inducción son de suma importancia en la actualidad, debido a las diferentes aplicaciones industriales a los que son sometidos (entre el 80% y 90% de los motores industriales son de inducción). Un motor de inducción puede funcionar en cualquier posición de montaje y en ambientes de todo tipo: húmedos, con gases corrosivos, con materias sólidas en suspensión (polvo, aserrín), etc. Tiene dimensiones reducidas y es sencillo de instalar y de operar. Su funcionamiento es seguro y uniforme, con un costo inicial relativamente bajo, un alto rendimiento y un reducido costo de operación.
El motor de inducción trifásico está formado por un rotor, que puede ser de dos tipos: a) de jaula de ardilla; b) bobinado, y un estator, en el que se encuentran las bobinas inductoras. Estas bobinas son trifásicas y están desfasadas entre sí 120º. Según el Teorema de Ferraris, cuando por estas bobinas circula un sistema de corrientes trifásicas, se induce un campo magnético giratorio que envuelve al rotor. Este campo magnético variable va a inducir una tensión en el rotor según la Ley de inducción de Faraday.
Entonces se da el efecto Laplace (ó efecto motor): todo conductor por el que circula una corriente eléctrica, inmerso en un campo magnético experimenta una fuerza que lo tiende a poner en movimiento. Simultáneamente se da el efecto Faraday (ó efecto generador): en todo conductor que se mueva en el seno de un campo magnético se induce una tensión.
El campo magnético giratorio, a velocidad de sincronismo, creado por el bobinado del estator, corta los conductores del rotor, por lo que se genera una fuerza electromotriz de inducción.
La acción mutua del campo giratorio y las corrientes existentes en los conductores del rotor, originan una fuerza electrodinámica sobre dichos conductores del rotor, las cuales hacen girar el rotor del motor.
La diferencia entre las velocidades del rotor y el campo magnético se denomina deslizamiento.
iv
medición, mal funcionamiento de protecciones, daño en los aislamientos, deterioro de dieléctricos, disminución de la vida útil de los equipos, entre otros.
v
ÍNDICE TEMÁTICO
AGRADECIMIENTOS i
RESUMEN iii
ÍNDICE TEMÁTICO v
ÍNDICE DE FIGURAS ix
INDICE DE TABLAS xii
GLOSARIO DE TÉRMINOS xiii
ABREVIATURAS xvi
UNIDADES DE MEDICIÓN xvii
JUSTIFICACIÓN xix
OBJETIVO xx
ANTECEDENTES xxi
CAPÍTULO 1.
EL MOTOR DE INDUCCIÓN. 1
1.1 MOTOR ELÉCTRICO 1
1.2 MOTOR DE INDUCCIÓN 1
1.2.1 ESTATOR. 2
1.2.2 ROTOR. 2
1.2.3 CARCAZA O SOPORTE. 3
1.2.4 AUXILIARES. 3
1.3 PRINCIPIO DE FUNCIONAMIENTO EL MOTOR DE 3
INDUCCIÓN.
1.3.1 PRODUCCIÓN DEL CAMPO MAGNÉTICO GIRATORIO. 3
1.3.2 DESARROLLO DEL PAR INDUCIDO. 4
1.4 DESLIZAMIENTO DE LA MÁQUINA DE INDUCCIÓN. 4
1.5 CIRCUITO EQUIVALENTE DE LA MÁQUINA DE 5
INDUCCIÓN.
1.5.1 EL MODELO TRANSFORMADOR DE UN MOTOR DE 5
INDUCCIÓN.
1.5.2 CIRCUITO MODELO DEL ROTOR. 6
1.5.3 CIRCUITO EQUIVALENTE FINAL. 7
1.6 CARACTERÍSTICA PAR-VELOCIDAD DEL MOTOR DE 8
INDUCCIÓN.
1.7 CLASES DE DISEÑO DE MOTORES DE INDUCCIÓN. 10
1.7.1 DISEÑO CLASE A 10
1.7.2 DISEÑO CLASE B 10
1.7.3 DISEÑO CLASE C. 10
vi
CAPÍTULO 2
INVERSORES 12
2.1 EL CONVERTIDOR EN PUENTE DE ONDA COMPLETA 12
2.2 EL INVERSOR DE ONDA CUADRADA 13
2.3 ANÁLISIS MEDIANTE SERIES DE FOURIER 17
2.4 DISTORSIÓN ARMÓNICA TOTAL 18
2.5 CONTROL DE ARMÓNICOS Y DE AMPLITUD 19
2.6 EL INVERSOR EN MEDIO PUENTE 21
2.7 SALIDA CON MODULACIÓN POR ANCHURA DE 22
IMPULSOS
2.7.1 CONMUTACIÓN BIPOLAR 23
2.7.2 CONMUTACIÓN UNIPOLAR 23
2.8 DEFINICIONES Y CONSIDERACIONES RELATIVAS A LA 25
MODULACIÓN PWM
2.9 ARMONICOS EN LA MODULACION DE PWM 27
2.9.1 CONMUTACIÓN BIPOLAR 27
2.9.2 CONMUTACIÓN UNIPOLAR 29
2.10 INVERSORES TRIFÄSICOS 30
2.10.1 INVERSOR DE SEIS PASOS 30
2.11 INVERSOR TRIFÁSICO PWM 33
2.12 CONTROL DE VELOCIDAD DE MOTORES DE INDUCCIÓN 35
2.13 ASPECTOS GENERALES DE LOS INVERSORES 37
CAPÍTULO 3.
LOS ARMÓNICOS 38
3.1 TRAYECTORIA DE LOS ARMÓNICOS 41
3.2 TEORÍA DE LOS ARMÓNICOS 41
3.3 ORIGEN DE LOS ARMÓNICOS 42
3.4 TIPOS DE ARMÓNICAS 43
3.4.1 ARMÓNICAS CARACTERÍSTICAS 43
3.5 CONTENIDO NORMAL DE ARMÓNICOS 44
3.6 FUENTES QUE PRODUCEN LAS ARMÓNICAS 44
3.7 EFECTOS DE LAS ARMÓNICAS 44
3.8 IMPACTO EN LA VIDA DE LOS EQUIPOS 46
3.9 EFECTOS EN LOS MOTORES DE INDUCCIÓN 47
CAPITULO 4.
REDUCCIÓN DE LA POTENCIA EN MOTORESDE INDUCCIÓN
DEBIDO A LA DISTORSIÓN EN LA FORMA DE ONDA 49
vii
4.2 ESFUERZO TÉRMICO 52
4.3 PARÁMETROS DEL CIRCUITO EQUIVALENTE 54
4.4 EFECTO DE LA SATURACIÓN 56
4.5 DETERMINACIÓN DE CORRIENTES ARMÓNICAS 56
4.6 PÉRDIDAS EN EL MOTOR 57
4.7 ANÁLISIS DE LA ELEVACIÓN DE TEMPERATURA EN UN 58
MOTOR DE INDUCCIÓN CAPÍTULO 5
REDUCCIÓN DE LA POTENCIA DE MOTORES DE INDUCCIÓN
ALIMENTADOS POR INVERSORES 63
5.1 METODOLOGÍA PROPUESTA 63
5.1.1 CONDICIONES DE VACÍO (SINUSOIDAL SUMINISTRO) 65
5.1.2 CONDICIONES DE VACÍO (SUMINISTRO DE INVERSOR) 66
5.1.3 CONDICIÓN DE CARGA (SINUSOIDAL SUMINISTRO) 67
5.1.4 CONDICIÓN DE CARGA (SUMINISTRO DE INVERSOR) 67
5.2 RESULTADOS EXPERIMENTALES 68
5.3 MÉTODOS SIMPLIFICADOS PARA LA DETERMINACIÓN DE 71
ALTERACIÓN DE POTENCIA.
5.3.1 COMPENSACIÓN DE PÉRDIDAS SÓLO EN EL HIERRO 72
5.3.2 COMPENSACIÓN DE PÉRDIDAS SÓLO EN EL COBRE 73
5.4 INSTRUMENTACIÓN ESTABLECIDA 75
5.5 LOS EFECTOS DE ÍNDICE DE MODULACIÓN EN EL INVERSOR 75
PWM ALIMENTARON LA EFICIENCIA DE MOTORES DE INDUCCIÓN
CAPÍTULO 6.
INVESTIGACIÓN DEL FUNCIONAMIENTO DE UN MOTOR DE
INDUCCIÓN (MI) ALIMENTADO POR UN INVERSOR PWM. 78
6.1 RENDIMIENTO DEL MOTOR. 78
6.2 TÉCNICAS DE LA MODULACIÓN DE ANCHURA DE PULSO. 80
6.3 MODELO DE UN MOTOR DE INDUCCIÓN ELABORADO POR 81
MEDIO DEL SOFTWARE MATLAB/ SIMULINK
6.3.1 PARTE 1: INVERSOR PWM 85
6.3.2 PARTE 2: MOTOR DE INDUCCIÓN 86
6.3.3 FILTRO ARMONICO TRIFASICO 87
6.3.4 DESCRIPCION DE OTROS BLOQUES 89
viii
6.4 MODELOS DE SIMULINK PARA CALCULAR LA EFICIENCIA DEL MOTOR DE INDUCCION TRIFASICO CON SUMINISTRO PWM, SUMINISTRO SINUSOIDAL Y SUMINISTRO PWM CONECTADO A UN FILTRO ARMONICO TRIFASICO.
102
6.5 GRAFICAS PARA LA COMPARACION DE LA EFICIENCIA 106
EN CADA UNO DE LOS CASOS
6.6 CONCLUSIONES 107
REFERENCIAS BIBLIOGRÁFICAS 110
ix
ÍNDICE DE FIGURAS
FIGURA 1.1 RANURAS DEL ESTATOR[2]. 2 FIGURA 1.2 ROTOR TIPO JAULA DE ARDILLA DE UN MOTOR DE INDUCCIÓN[3]. 2 FIGURA 1.3 DISTRIBUCIÓN SENOIDAL DEL CAMPO MAGNÉTICO GIRATORIO. 3
FIGURA 1.4 MODELO TRANSFORMADOR DE UN MOTOR DE INDUCCIÓN CON EL ROTOR Y EL ESTATOR CONECTADOS POR UN TRANSFORMADOR IDEAL DE RELACIÓN DE VUELTAS a EFF
5
FIGURA 1.5 CIRCUITO MODELO DEL ROTOR. 6
FIGURA 1.6 CIRCUITO MODELO DEL ROTOR CON TODOS LOS EFECTOS DE LA FRECUENCIA (DESLIZAMIENTO)CONCENTRADOS EN LA RESISTENCIA RR.
7
FIGURA 1.7 CIRCUITO EQUIVALENTE POR FASE DE UN MOTOR DE INDUCCIÓN. 8
FIGURA 1.8 CURVA CARACTERÍSTICA TÍPICA DE UN MOTOR [1]. 9 FIGURA 1.9 CURVA CARACTERÍSTICA PAR-VELOCIDAD DE UN MOTOR DE INDUCCIÓN, QUE
MUESTRA LOS RANGOS EXTENDIDOS DE OPERACIÓN [1].
9
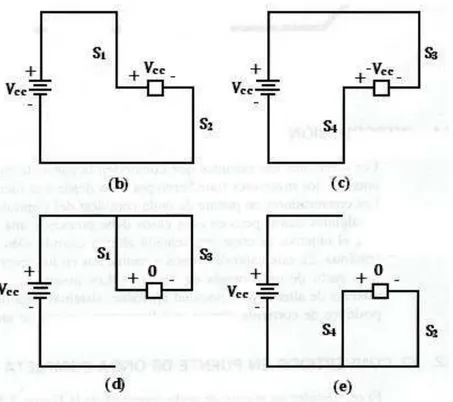
FIGURA 2.1 (A) PUENTE CONVERTIDOR DE ONDA COMPLETA, (B) S1 Y S2 CERRADOS(C) S3 Y S4 CERRADOS, (D) S1 Y S3 CERRADOS (E) S2 Y S4 CERRADOS
13
FIGURA 2.2 TENSIÓN DE SALIDA CON FORMA DE ONDA CUADRADA Y FORMA DE ONDA DE LA CORRIENTE EN RÉGIMEN PERMANENTE PARA UNA CARGA R-L
15
FIGURA 2.3 (A) PUENTE INVERSOR DE ONDA COMPLETA UTILIZANDO TRANSISTORES BJT (B) CORRIENTE EN RÉGIMEN PERMANENTE EN UNA CARGA R-L
17
FIGURA 2.4 (A) SALIDA DEL INVERSOR PARA CONTROL DE ARMÓNICOS Y AMPLITUD (B) ESQUEMA DE CONMUTACIÓN PARA EL PUENTE INVERSOR DE ONDA COMPLETA DE LA FIG. 2.1 (A)
19
FIGURA 2.5 ELIMINACIÓN DE ARMÓNICOS. (A) TERCER ARMÓNICO. (B) QUINTO ARMÓNICO. (C) TERCER Y QUINTO ARMÓNICO
21
FIGURA 2.6 UN INVERSOR EN MEDIO PUENTE UTILIZANDO DISPOSITIVOS IGBT. LA SALIDA ES
22
FIGURA 2.7 MODULACIÓN POR ANCHURA DE PULSOS BIPOLAR, (A) REFERENCIA SINUSOIDAL Y PORTADORA TRIANGULAR (B) LA SALIDA ES +VCC CUANDO VSENO>VTRI Y –VCC CUANDO VSENO<VTRI
24
FIGURA 2.8 (A) PUENTE CONVERTIDOR DE ONDA COMPLETA PARA PWM UNIPOLAR, (B) SEÑALES DE REFERENCIA Y PORTADORA, (C) TENSIONES VA Y VB DEL PUENTE, (D) TENSIÓN DE SALIDA
25
FIGURA 2.9 PWM UNIPOLAR CON INTERRUPTORES DE ALTA Y BAJA FRECUENCIA, (A) SEÑALES DE REFERENCIA Y DE CONTROL, (B) VA (FIGURA 2.8 (A)). (C) VB (D) SALIDA VA - VB.
26
FIGURA 2.10 UN PULSO PWM PARA CALCULAR LA SERIE DE FOURIER PARA PWM BIPOLAR 28
FIGURA 2.11 ESPECTRO DE LA FRECUENCIA PARA PWM BIPOLAR CON MA =1 28 FIGURA 2.12 ESPECTRO DE FRECUENCIA PARA PWM UNIPOLAR CON MG = 1. 29 FIGURA 2.13 CONMUTACIÓN (A) INVERSOR TRIFÁSICO, (B) ESQUEMA DE CONMUTACIÓN PARA
SALIDA DE SEIS PULSOS, (C) TENSIONES LÍNEA-LÍNEA DE SALIDA, (D) TENSIONES LÍNEA-NEUTRO PARA UNA CARGA CONECTADA EN ESTRELLA SIN TOMA DE TIERRA, (E) CORRIENTE EN LA FASE A PARA UNA CARGA R-L.
32
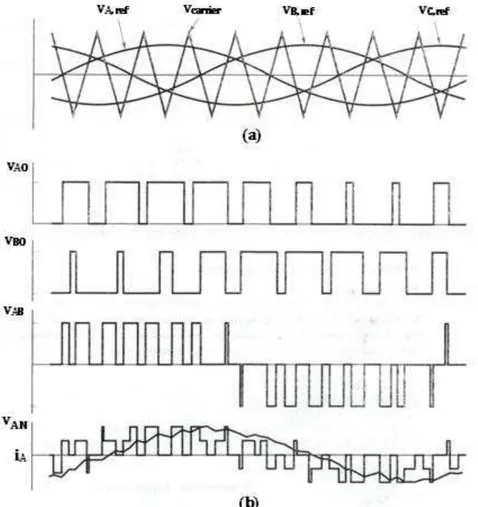
FIGURA 2.14 (A) ONDAS PORTADORA Y DE REFERENCIA PARA UN CONTROL PWM CON MF= 9 Y MA= 0,7 PARA EL INVERSOR TRIFÁSICO DE LA FIGURA 2.13(A). (B) FORMAS DE ONDA DE SALIDA; LA CORRIENTE SE CORRESPONDE CON UNA CARGA R-L
34
FIGURA 2.15 CURVAS PAR-VELOCIDAD DEL MOTOR DE INDUCCIÓN PARA CONTROL DE VELOCIDAD VARIABLE CON RELACIÓN VOLTIOS/HERTZIOS CONSTANTE.
x
FIGURA 2.16 CONVERTIDOR CA-CA CON PASO INTERMEDIO POR CORRIENTE CONTINÚA. 36
FIGURA 3.1 FUNCION 38
FIGURA 3.2 COMPONENTE FUNDAMENTAL 38
FIGURA 3.3 COMPONENTE ARMÓNICO 39
FIGURA 3.4 COMPONENTE ARMÓNICO 39
FIGURA 3.5 COMPONENTE ARMÓNICO 39
FIGURA 3.6 COMPONENTES ARMÓNICAS RELATIVAS A LA FUNDAMENTAL DE LA SEÑAL 40
FIGURA 3.7 COMPONENTES EN EL DOMINIO DEL TIEMPO Y DE LA FRECUENCIA 40
FIGURA 3.8 TRAYECTORIA DE LAS ARMÓNICAS EN UN SISTEMA INDUCTIVO 41
FIGURA 3.9 EFECTO DE LOS CAPACITORES EN LAS TRAYECTORIAS DE LAS ARMÓNICAS 41
FIGURA 3.10 COMPONENTES ARMÓNICOS: (1),FUNDAMENTAL (2), TERCER ARMÓNICO, (3)ONDA DISTORSIONADA.
42
FIGURA 4.1 CIRCUITO EQUIVALENTE DE UN MOTOR DE INDUCCIÓN 50
FIGURA 4.2 MAQUINA RESGUARDADA ENFRIADA RADIALMENTE MOTOR DE JAULA DE ARDILLA (A) FLUJO DE AIRE. (B) RED TÉRMICA
52
FIGURA 4.3 MOTOR BLINDADO ENFRIADO CON VENTILADOR ROTOR JAULA DE ARDILLA. (A) FLUJO DE AIRE. (B) RED TÉRMICA
53
FIGURA 4.4 CIRCUITO EQUIVALENTE DEL MOTOR DE INDUCCIÓN CON EXCITACIÓN SINUSOIDAL. (A) FUNDAMENTAL. (B) ARMÓNICO KH
55
FIGURA 4.5 AUMENTO EN LA TEMPERATURA EN EL MOTOR DE INDUCCIÓN RESGUARDADO ENFRIADO RADIALMENTE
61
FIGURA 4.6 AUMENTO DE TEMPERATURA EN EL MOTOR DE INDUCCIÓN BLINDADO ENFRIADO CON VENTILADOR
61
FIGURA 4.7 FACTORES DE REDUCCIÓN DE LA POTENCIA DEBIDO A LAS TENSIONES CON DISTORSIÓN ARMÓNICA. LAS LÍNEAS DE PUNTOS: REPRESENTAN UN MOTOR RESGUARDADO ENFRIADO RADIALMENTE. LA LÍNEA SOLIDA: REPRESENTA EL MOTOR BLINDADO ENFRIADO CON VENTILADOR
.
62
FIGURA 5.1 MÉTODO GRAFICO PARA OBTENERV’S Y DE I’MAGN 67
FIGURA 5.2 CURVAS DE EFICIENCIA PARA ÍNDICES DE MODULACIÓN DIFERENTES 76
FIGURA 5.3 COMPARACIÓN DE EFICACIA CON FUENTES DE SUMINISTRO DIFERENTES 76
FIGURA 6.1 “ESPECTRO ARMÓNICO PARA LA TÉCNICA MODULACIÓN DE ANCHO DE PULSO
SENOIDAL (SPWM)” 80 FIGURA 6.2 “MODELO EN MATLAB/SIMULINK DEL MOTOR DE INDUCCIÓN ALIMENTADO POR UN
INVERSO PWM” 82
FIGURA 6.3 “BLOQUE EN MATLAB DEL PWM Y PARÁMETROS DEL PWM” 83 FIGURA 6.4 “BLOQUE DEL MOTOR EN PROGRAMA SIMULINKASI COMO PARÁMETROS DEL
BLOQUE” 84
xi
FIGURA 6.12 “BLOQUE PARA LA MEDICIÓN DE CORRIENTES” 90 FIGURA 6.13 “BLOQUE DISTORSIÓN ARMÓNICA TOTAL THD.” 90 FIGURA 6.14 “BLOQUE PARA LA FUNCIÓN DE GANANCIA.” 91 FIGURA 6.15 “BLOQUE PARA LA MEDICIÓN DEL MOTOR” 91 FIGURA 6.16 “BLOQUE DE LA FUENTE DE VOLTAJE SINUSOIDAL TRIFÁSICA PROGRAMABLE” 91 FIGURA 6.17 “MUESTRA LOS RESULTADOS DE CONTROL TENSIÓN / FRECUENCIA (V/F)” 94 FIGURA 6.18 DISTORSIÓN TOTAL ARMÓNICA EN VOLTAJE COMO EN CORRIENTE 97 FIGURA 6.19 TORQUE Y PAR DESARROLLADA EN FUNCIÓN DEL TIEMPO 98 FIGURA 6.20 “COMPORTAMIENTO DE LA POTENCIA ACTIVA Y REACTIVA” 101 FIGURA 6.21 SUMINISTRO PURAMENTE SINUSOIDAL 103
FIGURA 6.22 SUMINISTRO PWM 104
xii
ÍNDICE DE TABLAS
TABLA 2.1 COEFICIENTES DE FOURIER NORMALIZADOS VN/VCCPARA PWM BIPOLAR 29 TABLA 2.2. COEFICIENTES DE FOURIER NORMALIZADOS VN/VCC PARA EL ESQUEMA PWM
UNIPOLARDE LA FIGURA 2.8
29
TABLA 2.3 AMPLITUDES NORMALIZADAS VN3/VCC PARA LAS TENSIONES LÍNEA-LÍNEATRIFÁSICAS PWM
35
TABLA 3.1 RELACIÓN ENTRE LAS SECUENCIAS Y LAS ARMÓNICA 43
TABLA 3.2 EFECTOS DE LAS ARMÓNICAS EN EQUIPO ELÉCTRICO 47
TABLA 4.1 CARACTERÍSTICAS DE LAS TRES FASES DEL MOTOR DE INDUCCIÓN 59
TABLA 4.2 CONTENIDO ARMÓNICO DE LAS FORMAS DE ONDA UTILIZADA 59
TABLA 5.1 MOTOR ELEVACIÓN TEMPERATURA CON LAS TRES PROVISIONES DE INVERSOR 69
TABLA 5.2 ELEVACIONDETEMPERATURA DE MOTOR Y TORSIÓN DE CARGA
RESULTANTEUSANDO LOS ÍNDICES DE ALTERACIÓN DE PODER PROPUESTOS
69
TABLA 5.3 DISTRIBUCIÓN DE ELEVACION DE TEMPERATURA DEL MOTOR QUE DESCUIDA EL FACTORDE ALTERACIÓN DE POTENCIA
70
TABLA 5.4 DISTRIBUCIÓN DE ELEVACION DE TEMPERATURAS DEL MOTOR USANDO EL FACTOR DE ALTERACIÓN DE POTENCIA
70
TABLA 5.5 COEFICIENTE DE INTERCAMBIO TERMICO PARA LAS TRES FUENTES DE SUMINISTRO 71
TABLA 5.6 ELEVACIONES DE TEMPERATURA DEL MOTOR USANDO COMPENSACIÓN DEPÉRDIDAS EN EL HIERRO Y EN EL COBRE (MÉTODO SIMPLIFICADO)
74
TABLA 5.7 ELEVACIONES DE TEMPERATURA DEL MOTOR USANDO COMPENSACIÓN DE PÉRDIDAS SÓLO EN EL HIERRO
74
TABLA 5.8 ELEVACIONES DE TEMPERATURA DEL MOTOR USANDO COMPENSACIÓN DEPÉRDIDAS
xiii
GLOSARIO DE TÉRMINOS
Carga no lineal
Carga desbalanceada que varía su valor respecto a factores propios de la red como son la frecuencia, distancia, temperatura, etc.
Contactores
Es un componente electromecánico que tiene por objetivo establecer o interrumpir el paso de corriente, ya sea en el circuito de potencia o en el circuito de mando, tan pronto se energice la bobina
Corriente eléctrica
La corriente o intensidad eléctrica es el flujo de carga por unidad de tiempo que recorre un material. Se debe a un movimiento de los electrones en el interior del material.
Efecto skin
Este efecto hace que los conductores eléctricos aumenten su resistencia con el aumento de la frecuencia ya que la corriente tiende a circular por la periferia del conductor.
Frecuencia
Frecuencia es una magnitud que mide el número de repeticiones por unidad de tiempo de cualquier fenómeno o suceso periódico.
Impedancia
La impedancia es la propiedad que tiene un componente para limitar el paso de corriente a través de un circuito. Normalmente nos referimos a ella como impedancia compleja, y consta de resistencia y reactancia). Se mide en ohms.
Inversor
Un inversor, también llamado ondulador, es un circuito utilizado para convertir corriente continua en corriente alterna. La función de un inversor es cambiar un voltaje de entrada de corriente directa a un voltaje simétrico de salida de corriente alterna, con la magnitud y frecuencia deseada por el usuario o el diseñador.
Onda sinusoidal
Se trata de una señal analógica, puesto que existen infinitos valores entre dos puntos cualesquiera del dominio.
Es la forma de onda de la corriente alterna más comúnmente utilizada ya que se consigue una transmisión más eficiente de la energía.
Onda cuadrada
xiv
permiten ser manipuladas fácilmente, un circuito electrónico que genera ondas cuadradas se conoce como generador de pulsos, este tipo de circuitos es la base de la electrónica digital
Pérdidas por histéresis
Son debidas a que el núcleo del transformador se encuentra ubicado dentro del campo magnético generado por el mismo y, en consecuencia, se imanta.
Pérdidas por la corriente de Foucault
Se produce cuando un conductor atraviesa un campo magnético variable, o viceversa. El movimiento relativo causa una circulación de electrones, o corriente inducida dentro del conductor. Estas corrientes circulares de Foucault crean electroimanes con campos magnéticos que se oponen al efecto del campo magnético aplicado
Potencia eléctrica
Es la cantidad de energía eléctrica o trabajo que se transporta o que se consume en una determinada unidad de tiempo
Potencia activa
Es la potencia que representa la capacidad de un circuito para realizar un proceso de transformación de la energía eléctrica en trabajo
Potencia aparente
Es la suma (vectorial) de la potencia que disipa dicho circuito y se transforma en calor o trabajo y la potencia utilizada para la formación de los campos eléctrico y magnético de sus componentes que fluctuará entre estos componentes y la fuente de energía (conocida como potencia reactiva).
Potencia reactiva
Esta potencia no tiene tampoco el carácter realmente de ser consumida y sólo aparecerá cuando existan bobinas o condensadores en los circuitos. La potencia reactiva tiene un valor medio nulo, por lo que no produce trabajo necesario.
Reactancia
Oposición ofrecida al paso de la corriente alterna por inductores (bobinas) o condensadores y se mide en Ohms.
Resonancia eléctrica
xv
Relés
El relé o relevador, es un dispositivo electromecánico. Funciona como un interruptor controlado por un circuito eléctrico en el que, por medio de una bobina y un electroimán, se acciona un juego de uno o varios contactos que permiten abrir o cerrar otros circuitos eléctricos independientes.
Tensión eléctrica
xvi
ABREVIATURAS DF
“Factor de distorsión” es una medida del alejamiento de la forma de una función periódica cualquiera con respecto a otra con forma de onda sinusoidal pura. Este factor de distorsión, normalmente se expresa en porcentaje.
F.P
El Factor de potencia es el cociente entre el voltaje total aplicado a un circuito y el voltaje en la parte resistiva del mismo. Es un indicador cualitativo y cuantitativo del correcto aprovechamiento de la energía eléctrica.
NEMA
"National Electrical Manufacturers Association" es una asociación estadounidense que establece estándares para la manufactura de productos eléctricos.
PLC
Los controladores lógicos programables o PLC (Programmable Logic Controller en sus siglas en inglés) son dispositivos electrónicos muy usados en automatización industrial.
Es un dispositivo electrónico digital que utiliza una memoria programable para almacenar instrucciones y para implementar funciones especificas tales como funciones lógicas, secuenciales, de temporización, de conteo y aritméticas para controlar maquinas y procesos.
PU
El sistema por unidad (pu) de cualquier cantidad se define como la relación entre esta cantidad y la cantidad base y se expresa como un decimal.
PWM
La modulación por ancho de pulsos (también conocida como PWM, siglas en inglés de pulse-width modulation) de una señal o fuente de energía es una técnica en la que se modifica el ciclo de trabajo de una señal periódica (una senoidal o una cuadrada), ya sea para transmitir información a través de un canal de comunicaciones o para controlar la cantidad de energía que se envía a una carga.
UPS
Sistema de Potencia Ininterrumpida o UPS(Uninterruptible Power Supply) es un
dispositivo que gracias a sus baterías, puede proporcionar energía eléctrica tras un apagón a todos los dispositivos que tenga conectados.
VDF
xvii
UNIDADES DE MEDICIÓN aeff
Relación de transformación
B
Densidad de campo magnético (Wb/m2)
E
Tensión eléctrica generada (v)
eind
Tensión eléctrica Inducida (v)
f
Frecuencia (Hz)
fe
Frecuencia de línea (Hz)
h
Orden armónico
I
Flujo de la corriente eléctrica (A)
k
Constante
ke
Constante
kh
Constante
L
Inductancia eléctrica (Ω)
n
Número de polos
P
Número de polos de la máquina
p
xviii
R
Resistencia eléctrica (Ω)
S
Velocidad síncrona (rpm)
s
Deslizamiento (%)
V Tensión eléctrica (v)
v
Velocidad de barra
X
Reactancia eléctrica (Ω)
Z
Impedancia eléctrica (Ω)
Par de la máquina (rpm)
xix
JUSTIFICACIÓN
Los motores de inducción son de los más utilizados en la industria por lo tanto merecen más estudios. El óptimo funcionamiento de estas máquinas proporcionará una mayor eficiencia lo que significa mayor producción y ahorro de energía.
Los motores de inducción son sensibles a los armónicos y se ven sometidos a todas las variaciones de la fuente de potencia, lo que afecta su funcionamiento y características de operación.
xx
OBJETIVO
Analizar el funcionamiento de un motor de inducción cuando está sometido a corrientes armónicas y es alimentado con una fuente sinusoidal o un inversor PWM, comparar cuales son los efectos en cada uno de los casos y cual forma de alimentación es la mejor para obtener una mayor eficiencia y rendimiento del motor de inducción.
OBJETIVOS ESPECÍFICOS
Realizar la comparación del motor de inducción cuando es alimentado por una fuente sinusoidal y cuando es alimentado por el inversor PWM. Por medio de un software matlab simulink versión 2009.
xxi
Antecedentes
Desde el año de 1887 en que Nikola Tesla construyó y patentó el primer motor de inducción y hasta la actualidad el motor de inducción ha tenido una gran evolución hasta convertirse en una parte esencial de la industria.
Debido a sus características el motor de inducción proporciona grandes ventajas, se puede construir de cualquier tamaño, tiene peso muy reducido y su rendimiento es muy elevado.
Sin embargo, antes del desarrollo de la electrónica de potencia, era difícil variar la velocidad al motor y por lo tanto las aplicaciones para el motor de inducción eran limitadas.
El variar la velocidad del motor de inducción es de gran importancia en muchos procesos industriales como en ventiladores y equipo de aire acondicionado, equipo de bombeo, bandas y transportadores industriales, elevadores, llenadoras, tornos y fresadoras, etc.
Hay varias técnicas para producir una velocidad deseada. La técnica más usada en la actualidad es la PWM (Modulación de anchura de pulso).
La modulación por ancho de pulsos es una técnica utilizada para regular la velocidad de giro de los motores eléctricos de inducción. Mantiene el par motor constante y no supone un desaprovechamiento de la energía eléctrica.
Sin embargo, con el uso de electrónica de potencia, el aumento de las corrientes armónicas a aumentado, provocando efectos nocivos en los motores de inducción, principalmente la reducción de su potencia y vida útil.
La eficiencia energética no es un tema nuevo. En un mundo tecnológicamente en expansión, se ha convertido en un elemento esencial el consumo de la energía y más aún el utilizar la energía sabiamente. Los motores eléctricos, en particular en el uso industrial, representa una gran porción del consumo de la energía eléctrica. Se ha informado de que más del 50% de la energía eléctrica generada en los Estados Unidos va a motores eléctricos de todos los tamaños. Es por eso que los Estados Unidos y sus vecinos de América del Norte han tomado la iniciativa de poner la eficiencia energética en su legislación. La legislación de eficiencia de los motores en los Estados Unidos, proviene de la Ley de Conservación y Política Energética (EPCA) de 1975, aprobada en respuesta a la crisis petrolera de la década de los 70´s.Desde octubre de 1992 la industria del motor se ha estado preparando para la aplicación de la EPACT´92.La fuerza impulsora detrás de la legislación EPACT´92, era la conservación de la energía, que incluye el impacto sobre los recursos naturales y el impacto ecológico sobre el media ambiente. Ahora hay nuevas opciones de productos disponibles para el usuario y los productos que no cumplen con los niveles mínimos de eficiencia legislados han quedado obsoletos. La parte de motores de la EPCT´92 solo cubre motores de inducción trifásicos de corriente alterna rotor jaula de ardilla.
xxii
temperatura resulta en pérdidas por lo que es un factor muy importante para determinar el rendimiento de la máquina. La presencia de armónicos que hay en la tensión de salida aplicada desde un inversor PWM, puede causar un calentamiento excesivo. La cantidad de distorsión de la tensión, medida por un “Factor de distorsión” (DF), que está definido por la norma IEEE 519, se utiliza para establecer los límites armónicos. Esta norma sugiere que no hay reducción de potencia en el motor mientras el contenido armónico no exceda el 5%, que es el límite de distorsión de la tensión en los sistemas de alimentación industriales. Sin embargo, no hay un límite específico en lo que respecta al contenido armónico individual.
1
CAPÍTULO 1. MOTOR DE INDUCCIÓN.
Los motores de inducción son una parte muy importante de la carga en todos los sistemas de distribución. En sistemas industriales, las máquinas que realizan diferentes procesos están basadas principalmente en motores de inducción. En cargas residenciales y comerciales, el uso de sistemas de aire acondicionado ha incrementado adicionalmente el porcentaje de cargas de motores de inducción que deben ser consideradas en los estudios de sistemas de distribución.
1.1 MOTOR ELÉCTRICO.
Un motor eléctrico es una máquina eléctrica que transforma energía eléctrica en energía mecánica por medio de interacciones electromagnéticas. Algunos de los motores eléctricos son reversibles, pueden transformar energía mecánica en energía eléctrica funcionando como generadores.
El funcionamiento del motor establece que si un conductor por el que circula una corriente eléctrica se encuentra dentro de la acción de un campo magnético, éste tiende a desplazarse perpendicularmente a las líneas de acción del campo magnético.
El conductor tiende a funcionar como un electroimán debido a la corriente eléctrica que circula por el mismo adquiriendo de esta manera propiedades magnéticas, que provocan, debido a la interacción con los polos ubicados en el estator, el movimiento circular que se observa en el rotor del motor.
1.2 MOTOR DE INDUCCIÓN.
El motor de inducción recibe ese nombre porque, al igual que el transformador, opera bajo el principio de inducción electromagnética. Debido a que este tipo de motores no llega a trabajar nunca a su velocidad síncrona, también se conocen como motores asíncronos. Por el número de fases se clasifican en general como [1]:
Trifásicos.
Bifásicos.
Monofásicos.
Elementos que constituyen un motor de inducción.Un motor de inducción está constituido principalmente por los siguientes elementos:
Estator.
Rotor.
2
Auxiliares: tapas anterior y posterior, chumaceras, tornillos de sujeción, caja de conexiones, base o soporte.
1.2.1. ESTATOR.
El estator de un motor de inducción está formado por paquetes de láminas de acero al silicio troquelados.
El estator representa una de las partes del circuito magnético del motor. El contenido de silicio está constituido por paquetes de lamina troqueladas en forma de ranuras, con objeto de que el bobinado del estator pueda alojarse en dichas ranuras. La forma de las ranuras varía de acuerdo al tamaño del motor.
Figura 1.1 Ranuras del estator [1].
1.2.2. ROTOR.
El rotor de un motor de inducción se construye por barras de aluminio, las cuales se unen en los extremos por anillos quedando en cortocircuito lo que da una forma de jaula de ardilla.
3 1.2.3 CARCAZA O SOPORTE.
La carcaza recibe también el nombre de soporte por ser el elemento que contiene el estator y los elementos auxiliares del motor.
1.2.4 AUXILIARES.
Los elementos auxiliares del motor de inducción son elementos necesarios para el funcionamiento de este y dependen del tipo de motor.
1.3 PRINCIPIO DE FUNCIONAMIENTO EL MOTOR DE INDUCCIÓN.
El principio de funcionamiento del motor de inducción es similar al de un transformador, también son llamados motores asíncronos.
El devanado del rotor, que conduce la corriente alterna que se produce por inducción desde el devanado del estator conectado directamente, consiste en conductores de cobre o aluminio vaciados en un rotor de laminaciones de acero.
1.3.1 PRODUCCIÓN DEL CAMPO MAGNÉTICO GIRATORIO.
El motor de inducción se construye con tres devanados, espaciados y desfasados 120o eléctricos. En cada una de las bobinas se inyectan corrientes alternas sinusoidales desfasadas 120o en el espacio.
Cada bobina produce un campo magnético en el espacio. La amplitud de este campo se encuentra en la dirección del eje magnético de la bobina y varía en el tiempo. La combinación de campos pulsantes producidos por las tres corrientes desfasadas temporalmente, circulando por las tres bobinas desfasadas espacialmente, se traduce en un campo magnético distribuido sinusoidalmente en el espacio, que rota a la velocidad de variación de las corrientes en el tiempo (figura 1.3) [2].
4
Puesto que el periodo o intervalo de tiempo de la variación sinusoidal de la corriente es el mismo en los conductores, la velocidad del campo rotatorio, varía directamente con la frecuencia (f), pero inversamente con el número de polos.
(1.1)
Ya que el número de polos depende de n, o sea del devanado que se emplee, la
velocidad es en realidad una función de la frecuencia [3].
1.3.2 DESARROLLO DEL PAR INDUCIDO.
Cuando se aplican al estator un conjunto de voltajes trifásicos, se generan corrientes trifásicas que producen un campo magnético que rota en dirección contraria a las manecillas del reloj. Este induce voltaje en las barras del rotor, y este voltaje esta dado por la ecuación:
(1.2)
Donde es la velocidad de la barra, relativa al campo magnético; es el vector de densidad de flujo magnético; y 1, la longitud del conductor en el campo magnético.
El movimiento relativo del rotor con respecto al campo magnético del estator ( ) induce voltaje en la barra del rotor. El flujo magnético del rotor produce un campo magnético ( ). El par de la máquina, esta dado por:
(1.3)
Y la dirección es en sentido contrario a las manecillas del reloj, por lo tanto el rotor se acelera en esa dirección. En operación normal, los campos magnéticos del estator y del rotor giran a la velocidad sincrónica, mientras que el rotor gira a una velocidad menor.
1.4 DESLIZAMIENTO DE LA MÁQUINA DE INDUCCIÓN.
El deslizamiento de una máquina de inducción, se define como la velocidad relativa entre el campo magnético producido por las corrientes inyectadas en el estator y la velocidad mecánica del rotor, por unidad de la velocidad del campo:
(1.4)
5
En general, a la velocidad del campo se le denomina velocidad síncrona de la máquina, y el deslizamiento indica qué tan cerca se encuentra la máquina de esta velocidad. Si el rotor de la máquina gira a una velocidad mayor que la síncrona, el deslizamiento se hace negativo. Cuando se conocen todos los parámetros del modelo de una máquina de inducción y la fuente de alimentación, el deslizamiento determina el punto de operación. Por esta razón se utiliza esta variable para definir el estado de la máquina [2].
1.5 CIRCUITO EQUIVALENTE DE LA MÁQUINA DE INDUCCIÓN.
El circuito equivalente de un motor de inducción es muy similar al de un transformador, debido a la acción de transformación que ocurre al inducirse corrientes en el rotor, desde el estator.
1.5.1. EL MODELO TRANSFORMADOR DE UN MOTOR DE INDUCCIÓN.
En la figura 1.4 se muestra un circuito equivalente transformador, por fase, de un motor de inducción. La resistencia del estator es R1 y la reactancia de dispersión es X1. E1 es el voltaje primario del estator, acoplado al secundario ER mediante un transformador ideal con relación de vueltas aeff. El voltaje ER producido en el rotor
ocasiona un flujo de corriente en el rotor. RC es el componente de pérdidas en el núcleo y jXM se refiere a la reactancia de magnetización, RR y jXR son las impedancias del rotor. Asimismo, I1constituye la corriente de línea, IM la corriente
de magnetización. IR es el flujo de corriente en el rotor e I2 es la corriente rotórica
[4].
6 1.5.2 CIRCUITO MODELO DEL ROTOR.
Cuanto mayor sea el movimiento relativo entre los campos magnéticos del rotor y del estator, mayor será el voltaje resultante en el rotor y la frecuencia del rotor. El mayor movimiento relativo ocurre cuando el rotor se encuentra estacionario, condición llamada de rotor detenido o de rotor bloqueado, de modo que en esta condición se inducen el máximo voltaje y la máxima frecuencia del rotor. El mínimo voltaje (0 V) y la mínima frecuencia (0 Hz) ocurren cuando el motor se mueve con la misma velocidad que el campo magnético del estator, caso en que no hay movimiento relativo [4].
El voltaje y la frecuencia del rotor son directamente proporcionales al deslizamiento del rotor, por lo que el voltaje y la frecuencia inducidos para cualquier deslizamiento son:
(1.5)
Donde es el voltaje a rotor bloqueado, es el deslizamiento y es la frecuencia de línea.
La reactancia del rotor ( ) no es constante como lo es la resistencia (RR); por lo
que depende de la inductancia (LR), de la frecuencia (ωr) y de la corriente del rotor:
Sustituyendo en la ecuación 1.4:
en donde XR0 es la reactancia a rotor bloqueado [4]:
7
Finalmente obtenemos el circuito equivalente del rotor en la figura 1.6. El flujo de corriente en el rotor se calcula como:
(1.9)
De esta última ecuación, es posible calcular la impedancia equivalente del rotor; desde el punto de vista de que se encuentra alimentada por la fuente de voltaje ER0:
para obtener el circuito equivalente del rotor en el que el voltaje ER0 es constante y la impedancia del rotor contiene todos los efectos de la variación del deslizamiento (figura 1.6) [4].
Figura1.6 Circuito modelo del rotor con todos los efectos de la frecuencia (Deslizamiento) concentrados en la resistencia RR[4].
1.5.3. CIRCUITO EQUIVALENTE FINAL.
Para obtener el circuito equivalente por fase, es necesario referir en el estator, el modelo del rotor. Si la relación de vueltas de un motor de inducción es aeff, el
voltaje transformador es:
8 y la corriente e impedancia rotóricas son:
Y se define:
Obtenemos finalmente el circuito equivalente por fase de un motor de inducción.
Figura 1.7 Circuito equivalente por fase de un motor de inducción[4].
1.6 CARACTERÍSTICA PAR-VELOCIDAD DEL MOTOR DE INDUCCIÓN.
En la figuras 1.8 y 1.9 se presentan las curvas características par-velocidad del motor de inducción. La información que proveen, se resume a continuación:
El par inducido del motor es cero a la velocidad sincrónica.
La curva par-velocidad es aproximadamente lineal entre vacío y plena carga; ya que cuando crece el deslizamiento, crecen linealmente, la corriente rotórica, el campo magnético del rotor, y el par inducido.
El par máximo o de desviación, equivale a 2 ó 3 veces el par nominal y no puede ser excedido.
9
Para un deslizamiento dado, el par inducido varía con el cuadrado del voltaje aplicado.
La máquina de inducción opera como generador cuando la velocidad del rotor es mayor que la sincrónica. Entonces la dirección del par inducido se invierte, convirtiendo potencia mecánica en potencia eléctrica.
Para frenar con rapidez el motor, se conmutan dos fases, que significa invertir la dirección de rotación del campo magnético.
Figura 1.8 Curva característica típica de un motor [4].
10
1.7 CLASES DE DISEÑO DE MOTORES DE INDUCCIÓN.
La Asociación Nacional de Fabricantes Eléctricos (NEMA, por sus siglas en ingles) yla Comisión Electrotécnica Internacional (IEC, por sus siglas en ingles), han desarrollado un sistema de identificación mediante letras para los motores comerciales, según las curvas características par-velocidad para cadadiseño:
1.7.1DISEÑO CLASE A.Es un motor de jaula de ardilla para usarse a velocidad
constante. Sus principales características son:
Buena capacidad de disipación de calor.
Alta resistencia y baja reactancia al arranque.
El par máximo está entre 200% y 300% del par de plena carga y ocurre a un bajo deslizamiento.
Aceleración bastante rápida hacia la velocidad nominal.
Presenta la mejor regulación de velocidad, entre el 2 y 4%.
Desafortunadamente su corriente de arranque varía entre 5 y 7 veces la corriente nominal.
Han sido remplazados por los motores de diseño clase B en los últimos años.
Se utilizan en ventiladores, sopladores, bombas, tornos, etc.
1.7.2 DISEÑO CLASE B
.
Se les llama motores de propósito general y a este tipo pertenecen la mayoría de los motores con rotor de jaula de ardilla. A continuación se resumen sus características: Par de arranque normal, baja corriente de arranque y bajo deslizamiento.
Produce casi el mismo par de arranque que el diseño anterior.
El par máximo es mayor o igual al 200% el par de carga nominal.
Deslizamiento bajo (menor del 5%).
Se prefieren sobre los diseños de clase A por requerir poca corriente de arranque.
1.7.3 DISEÑO CLASE C.
Alto par de arranque (entre 2 y 2.5 veces el nominal) con bajas corrientes de arranque (de 3.5 a 5 veces la nominal).
Son construidos con un rotor de doble jaula (más costosos).
Bajo deslizamiento (menos del 5%) a plena carga.
Debido a su alto par de arranque, acelera rápidamente.
Cuando se emplea con cargas pesadas, se limita la disipación térmica del motor, ya que la mayor parte de la corriente se concentra en el devanado superior.
11 1.7.4DISEÑO CLASE D.
También conocidos como de alto par y alta resistencia.
Alto par de arranque (275% o más del nominal) y baja corriente de arranque.
Alto deslizamiento a plena carga.
La alta resistencia del rotor desplaza el par máximo hacia una velocidad muy baja.
Diseñado para servicio pesado de arranque, en especial grandes volantes utilizados en troqueladoras o cortadoras.
12
CAPITULO 2 INVERSORES
Los inversores son circuitos que convierten la corriente continua en corriente alterna. Más exactamente, los inversores transfieren potencia desde una fuente de continua a una carga de alterna. En este capítulo vamos a centrarnos en los inversores que generan una salida de alterna a partir de una entrada de continua. Los inversores se utilizan en aplicaciones tales como motores de corriente alterna de velocidad ajustable, sistemas de alimentación ininterrumpida (SAI) y dis-positivos de corriente alterna que funcionen a partir de una batería de automóvil. 2.1 EL CONVERTIDOR EN PUENTE DE ONDA COMPLETA
El convertidor en puente de onda completa de la Figura 2.1 (a) es el circuito básico que se utiliza para convertir continua en alterna. A partir de una entrada de continua se obtiene una salida de alterna cerrando y abriendo interruptores en una determinada secuencia. La tensión de salida v0 puede ser + Vcc, - Vcc, o cero,
dependiendo de qué interruptores están cerrados. Las Figuras 2.1(b) a la 2.1(e) muestran los circuitos equivalentes de las combinaciones de interruptores.
Interruptores cerrados Tensión de salida
S1 y S2 S3y S4 S1 y S3 S2 y S4
+ Vcc - Vcc
13
Figura . a Pue te co vertidor de o da co pleta, S1y S2cerrados(c) S3 y S4 cerrados, (d) S1 y S3 cerrados (e) S2 y S4 cerrados . [5]
Se observa que S1 y S4no deberían estar cerrados al mismo tiempo, ni tampoco S2
y S3. De otra manera habría un cortocircuito en la fuente de continua. Los
interruptores reales no se abren y se cierran instantáneamente. Por tanto, deben tenerse en cuenta los tiempos de transición de la conmutación al diseñar el control de los interruptores. El traslapamiento de los tiempos de conducción de los interruptores resulta en un cortocircuito, denominado como fallo de traslapamiento (shoot-throughfault) en la fuente de tensión continua. El tiempo permitido para la conmutación se denomina tiempo muerto (blanking time).
2.2 EL INVERSOR DE ONDA CUADRADA
El esquema de conmutación más sencillo del convertidor en puente de onda completa genera una tensión de salida en forma de onda cuadrada. Los interruptores conectan la carga a + Vcc cuando S1 y S2 están cerrados ya -Vcc
cuando S3 y S4 están cerrados. La conmutación periódica de la tensión de la carga
entre +Vcc y -Vcc genera en la carga una tensión con forma de onda cuadrada.
Aunque esta salida alterna no es sinusoidal, puede ser una onda de alterna ade-cuada para algunas aplicaciones.
14
calidad sinusoidal que la tensión, a causa de las propiedades de filtrado de las inductancias. Una carga inductiva requiere ciertas consideraciones a la hora de diseñar los interruptores en el circuito en puente de onda completa, ya que las corrientes de los interruptores deben ser bidireccionales.
Para una carga serie R-L y una tensión de salida con forma de onda cuadrada, suponemos que los interruptores S1y S2 de la figura 2.1(a) se cierran en t= 0. La
tensión en la carga es + VCC, y la corriente comienza a aumentar en la carga y
enS3 y S2. La corriente se expresa como la suma de las respuestas natural y
forzada:
i0(t) = if(t) + in(t)= + Ae-1/τ ≤ t ≤ (2.1)
DondeA es una constante que se calcula a partir de la condición inicial y τ= L/R.
En t = T/2, S1 y S2 se abren, y S3 y S4 se cierran. La tensión en la carga R-L pasa
a ser -Vcc, y la corriente tiene la forma:
i0(t)= + Be-(t-T/2)/t, ≤ t ≤ T (2.2)
donde la constante B se calcula a partir de la condición inicial.
Cuando se proporciona energía al circuito por primera vez y la corriente inicial de la inductancia es cero, tenemos un transitorio antes de que la corriente de la carga alcance el régimen permanente. En régimen permanente, i0es periódica y simétrica con respecto a cero, como se muestra en la figura 2.2. Hacemos que la condición inicial de la corriente que se describe en la ecuación 2.1 sea Imín, y que
la condición inicial de la corriente que se describe en la ecuación 2.2 sea Imax
Calculando la Ecuación 2.1 en t = 0,
15
Figura. . Tensión de salida con forma de onda cuadrada y forma de onda de la corriente en régimen permanente para una carga R-L . [5]
O
A= Imin- (2.3)
De igual manera, evaluamos la ecuación 2.2 en t=T/2:
i0(T/2)= + Be0 = Imax
o
B= Imax + (2.4)
En régimen permanente, las formas de onda de la corriente descritas por las ecuaciones 2.1 y 2.2 se convierten en
≤ ≤
(2.5)
16
Obtenemos una expresión de Imax evaluándola primera parte de la ecuación 2.5
en t =T/2
i(T/2) = Imax = + (Imin - )e – T/ τ (2.6)
y por simetría,
Imin = - Imax (2.7)
Sustituyendo - Imax por Imin en la ecuación (2.6) despejando Imax,
(2.8)
Así, las ecuaciones (2.5) y (2.8) describen la corriente en una carga R-L en régimen permanente cuando se le aplica una tensión con forma de onda cuadrada. La figura 2.2 muestra las corrientes resultantes en la carga, la fuente y los interruptores.
La potencia absorbida por la carga puede calcularse a partir deI2
rmsR, donde la corriente rms de la carga viene determinada por la ecuación que la define. Se puede simplificar la integración aprovechándose de la simetría de la onda. Como el cuadrado de cada uno de los semiperiodos de la corriente es idéntico, sólo hemos de evaluar la primera mitad del período:
Irms= / / 2dt (2.9)
Si los interruptores son ideales, la potencia entregada por la fuente debe ser la misma que la absorbida por la carga. La potencia de una fuente de continua viene determinada por
Pcc = VccIs (2.10)
17
diodos están polarizados en inversa cuando la corriente en el interruptor es positiva. La figura 2.3(a) muestra el inversor en puente de onda completa, con los interruptores implementados mediante transistores de unión bipolar con diodos de realimentación. Las corrientes de transistor y de diodo para una tensión con forma de onda cuadrada y una carga R-L se muestran en la figura 2.3(b). Los módulos semiconductores de potencia suelen incluir diodos de realimentación junto a los interruptores.
Cuando los transistores Q1y Q2son apagados en la figura 2.3(a), la corriente de la
carga debe ser mantenida y transferida a los diodos D3 y D4, haciendo que la
tensión de salida sea -Vcc, poniendo en conducción encender de conmutación 3 y
4 antes de que Q3 y Q4 son encendidos. Hay que encender los transistores Q3 y
Q4 antes de que la corriente de la carga disminuya hasta cero.
Figura . (a) Puente inversor de onda completa utilizando transistores BJT(b) corriente en régimen permanente en una carga R-L . [5]
2.3 ANÁLISIS MEDIANTE SERIES DE FOURIER
18
V0(t)= (2.11)
i0(t)= (2.12)
La potencia absorbida por una carga con una resistencia serie se calcula a partir de Irms2 donde la corriente rms se puede determinar a partir de las corrientes eficaces correspondientes acada una de las componentes de la serie de Fourier:
Irms = =
2 (2.13)
Donde:
In= (2.14)
YZnes la impedancia de la carga para el armónico n.
De igual manera, se puede determinar la potencia absorbida en la resistencia de carga para cada frecuencia en las series de Fourier. La potencia total se determina a partir de
Pn (2.15)
Donde In,rms es In/
En el caso de una onda cuadrada, las series de Fourier contienen los armónicos impares, y pueden representarse así:
V0(t)=
(sen nω0t) (2.16)
2.4 DISTORSIÓN ARMÓNICA TOTAL
Como el objetivo del inversor es utilizar una fuente de tensión continua para alimentar a una carga que requiera corriente alterna, resulta útil describir la calidad de la tensión o corriente de salida alternas. La calidad de una onda no sinusoidal puede expresarse en términos del factor DAT (Distorsión armónica total). Suponiendo que no hay componente de continua en la salida,
DAT=
=
19
La DAT de la corriente se calcula sustituyendo la corriente por la tensión en la ecuación anterior. La DAT de la corriente de carga suele ser de más interés que la de la tensión de salida. Esta definición del factor DAT se basa en las series de Fourier, por lo que existe una ventaja al utilizar el método de las series de Fourier para el análisis cuando hay que calcular el factor DAT. Otras medidas de la distorsión, como el factor de distorsión, también pueden aplicarse para describir las formas de onda de salida en los inversores.
2.5 CONTROL DE ARMÓNICOS Y DE AMPLITUD
La amplitud de la frecuencia fundamental de una salida con forma de onda cuadrada del puente inversor de onda completa está determinada por la tensión de entrada de continua (ecuación 2.16). Se puede generar una salida controlada modificando el esquema de conmutación. Una tensión de salida con la forma mostrada en la figura 2.4(a) tiene intervalos en los que la salida es cero, así como
+ Vcc y -Vcc. Se puede controlar esta tensión de salida ajustando el intervalo a cada lado del pulso donde la salida es cero.El valor rms de la forma de onda de la tensión en la Figura 2.4(a) es:
Vrms= Vcc (2.18)
20
La serie de Fourier de la forma de onda se expresa como
V0(t)= (2.19)
De la simetría de media onda, las amplitudes son:
Vn= (2.20)
Donde es el ángulo de tensión cero a cada extremo del pulso. La amplitud en la salida para cada frecuencia de salida es una función de . En particular, la amplitud a la frecuencia fundamental se controla ajustando :
V1=( cos ( ) (2.21)
El contenido armónico también puede controlarse ajustando . Si = 30°, por ejemplo, V3 = 0. Esto resulta significativo, porque el tercer armónico se puede
eliminar de la corriente y la tensión de salida. Se pueden eliminar otros armónicos seleccionando un valor de que haga que el término del coseno en la ecuación 2.20 sea cero. El armónico n se elimina si;
(2.22)
El esquema de conmutación que se precisa para generar una salida como la de la figura 2.4(a) debe proporcionar intervalos en los que la tensión de salida sea cero, así como + Vcc, La secuencia de conmutación de la figura 2.4(b) es una manera de
implementar la forma de onda de salida que se precisa.
El control de amplitud y la reducción de armónicos puede que no sean compatibles. Por ejemplo, al establecer a 30° para eliminar el tercer armónico, se fija la amplitud de la frecuencia fundamental de salida en V1= (4Vcc/ )cos(300)=
1,1 (Vcc) eliminándose la posibilidad de un posterior control. Para controlar tanto la amplitud como los armónicos utilizando este esquema de conmutación, es necesario controlar la tensión continua de entrada al inversor.
Una representación gráfica de la integración en el coeficiente de la serie de Fourier de la ecuación 2.20 ofrece algunas ideas del proceso de eliminación de los armónicos. Los coeficientes de Fourier se calculan a partir de la integral del producto de la forma de onda y una sinusoide. La figura2.5(a) muestra la forma de onda de salida para = 30° y la sinusoide correspondiente a = 3 . El producto de estas dos formas de onda tiene un área igual a cero, lo que muestra que el tercer armónico es cero. La figura 2.5(b) muestra la forma de onda para = 18° y la sinusoide correspondiente a =5 mostrando que el quinto armónico se elimina para este valor de .
21
Figura . Eliminación de armónicos. (a) tercer armónico. (b) quinto armónico. (c) Tercer y quinto
ar ó ico . [5]
2.6 EL INVERSOR EN MEDIO PUENTE
El convertidor en medio puente de la figura 2.6 se puede utilizar como inversor. En el inversor en medio puente, el número de interruptores se reduce a dos, dividiendo la tensión de la fuente de continua en dos partes mediante los condensadores. Cada condensador deberá tener el mismo valor y tendrá en bornes del mismo una tensión de Vcc/2. Cuando se cierra S1, la tensión en la carga
es de - Vcc/2. Cuando se cierra S2, la tensión en la carga es de + Vcc/2. Así, se
22
Figura. . Un inversor en medio puente utilizando dispositivos IGBT. La salida es / . [5]
La tensión en bornes de un interruptor abierto es el doble de la tensión de la carga, o . Al igual que en el puente inversor de onda completa se requiere un
tiempo muerto para los interruptores con el fin de prevenir un cortocircuito en la fuente, y se necesitan los diodos de realimentación para garantizar una continuidad de la corriente para las cargas inductivas.
2.7 SALIDA CON MODULACIÓN POR ANCHURA DE IMPULSOS
La modulación por anchura de impulsos (PWM, Pulse Width Modulation) proporciona un método de disminuir el factor DAT de la corriente de carga. Una salida de un inversor PWM, con algo de filtrado, en general cumple las especificaciones de DAT con más facilidad que el esquema de conmutación de onda cuadrada. La salida PWM sin filtrar tendrá un factor DAT relativamente elevado, pero los armónicos tendrán unas frecuencias mucho más altas que las de la onda cuadrada, haciendo más sencillo el filtrarlos.
En la modulación PWM, la amplitud de la tensión de salida se puede controlar por medio de las formas de onda moduladoras. Dos ventajas de la modulación PWM son la reducción de los requerimientos de filtro para reducir los armónicos y el control de la amplitud de salida.Entre las desventajas se puede citar que los circuitos de control de los interruptores son más complejos, y que hay unas mayores pérdidas debidas a una conmutación más frecuente.
23 2.7.1 CONMUTACIÓN BIPOLAR
La figura 2.7 ilustra el principio de la modulación por anchura de impulsos bipolar sinusoidal. La figura 2.7(a) muestra una señal sinusoidal de referencia y una señal portadora triangular. Cuando el valor instantáneo de la sinusoide de referencia es mayor que la portadora triangular, la salida está en + Vcc, y cuando la referencia es menor que la portadora, la salida está en - Vcc:
V0 = +Vcc para Vseno>Vtri
(2.23)
V0 = -Vcc para Vseno<Vtri
Esta versión de PWM es bipolar, ya que la salida toma valores alternos entre más y menos la tensión de la fuente de continua.
El esquema de conmutación que permitirá implementar la conmutación bipolar utilizando el puente inversor de onda completa de la figura 2.1 se determina comparando las señales instantáneas de referencia y portadora:
S1 y S2están conduciendo cuando Vseno>Vtri (V0 = + Vcc)
S3 y S4están conduciendo cuando Vseno<Vtri (V0 = - Vcc)
2.7.2 CONMUTACIÓN UNIPOLAR
24
Figura . Modulación por anchura de pulsos bipolar, (a) referencia sinusoidal y portadora triangular (b) la salida es +Vcc cuando Vseno>Vtri y -Vcc cuando Vseno<Vtri . [5]
como en la conmutación bipolar. Un esquema de conmutación unipolar tiene los siguientes controles de interruptores:
S1 conduce cuando vseno>vtri
S2 conduce cuando -vseno<vtri
S3 conduce cuando -vseno>vtri
S4 conduce cuando vseno<vtri
Observe que los pares de interruptores (S1,S4) y (S2, S3) son complementarios:
cuando un interruptor de uno de los pares está cerrado, el otro está abierto. Las tensiones vay vb en la figura 2.8 (a) oscilan entre + Vcc y cero. La tensión de salida
v0 = vab = va - vb es tal y como se muestra en la figura 2.8(b).
Otro esquema de conmutación unipolar sólo tiene un par de interruptores trabajando a la frecuencia de la portadora mientras que el otro par trabaja a la frecuencia de referencia, con lo que tenemos dos interruptores de alta frecuencia y dos de baja frecuencia. En este esquema de conmutación,
S1 conduce cuando vseno>vtri (alta frecuencia) S4 conduce cuando vseno<vtri (alta frecuencia) S2 conducecuando vseno> 0 (baja frecuencia) S3 conduce cuando vseno< 0 (baja frecuencia)
donde las ondas sinusoidal y triangular son como las mostradas en la figura 2.9(a). De forma alternativa, S2 y S3 podrían ser los interruptores de alta frecuencia, y S1 y
25
Figura . (a) Puente convertidor de onda completa para PWM unipolar, (b) Señales de referencia y portadora, (c) Tensiones va y vb del pue te, d Te sió de salida . [5]
2.8 DEFINICIONES Y CONSIDERACIONES RELATIVAS A LA MODULACIÓN PWM
Llegados a este punto, deberían apuntarse algunas definiciones y consideraciones que resultan de utilidad al utilizar PWM.
1. Índice de modulación de frecuencia mf. La serie de Fourier de la tensión de salida PWM tiene una frecuencia fundamental que es la misma que la de la señal de referencia. Las frecuencias armónicas existen en y alrededor de los múltiplos de la frecuencia de conmutación. Los valores de algunos armónicos son bastante grandes, a veces mayores que la componente fundamental. Sin embargo, como estos armónicos se encuentran en frecuencias altas, para eliminarlos puede bastar con un simple filtro paso bajo. En el apartado siguiente se ofrecen detalles de los armónicos para modulación PWM. El índice de modulación de frecuencia mf se define como la relación entre las frecuencias las señales portadora y de referencia:
mf=
=
26
Figura . PWM unipolar con interruptores de alta y baja frecuencia, (a) Señales de referencia y de control, (b) va(Figura 2.8(a)). (c) vb,, (d) Salida va - vb.”.[5]
Al aumentar la frecuencia de la portadora (aumento de mf) aumentan las
frecuencias a las que se producen los armónicos. Una desventaja de las elevadas frecuencias de conmutación son las mayores pérdidas en los interruptores utilizados para implementar el inversor.
2 Índice de modulación de amplitud ma: El índice de modulación de amplitud ma se define como la relación entre las amplitudes de las señales de referencia y portadora:
mf=
=
(2.25)
Si ma≤ 1, la amplitud de la frecuencia fundamental de la tensión de salida, V1, es linealmente proporcional a ma.Es decir,
V1 = maVcc (2.26)
![Figura 1.7 Circuito equivalente por fase de un motor de inducción[4].](https://thumb-us.123doks.com/thumbv2/123dok_es/4984129.76327/32.918.157.623.162.395/figura-circuito-equivalente-fase-motor-induccion.webp)
![Figura 1.9 Curva característica par-velocidad de un motor de inducción que muestra los rangos extendidos de operación [4]](https://thumb-us.123doks.com/thumbv2/123dok_es/4984129.76327/33.918.271.652.711.1026/figura-curva-caracteristica-velocidad-induccion-muestra-extendidos-operacion.webp)


![Figura 2.16. Convertidor CA-CA con paso intermedio por corriente continúa.[5]](https://thumb-us.123doks.com/thumbv2/123dok_es/4984129.76327/60.918.185.742.699.928/figura-convertidor-ca-ca-paso-intermedio-corriente-continua.webp)
![Figura 3.7 Componentes en el dominio del tiempo y de la frecuencia [6]](https://thumb-us.123doks.com/thumbv2/123dok_es/4984129.76327/64.918.260.664.777.1024/figura-componentes-dominio-tiempo-frecuencia.webp)
![Tabla 3.1 Relación entre las secuencias y las armónicas [7]](https://thumb-us.123doks.com/thumbv2/123dok_es/4984129.76327/67.918.231.687.302.689/tabla-relacion-secuencias-armonicas.webp)
![Figura 4.3Motor totalmente cerrado enfriado con ventilador rotor jaula de ardilla (a) flujo de aire (b) red térmica [10]](https://thumb-us.123doks.com/thumbv2/123dok_es/4984129.76327/77.918.286.630.115.477/figura-motor-totalmente-cerrado-enfriado-ventilador-ardilla-termica.webp)
