INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
IMPLEMENTACIÓN DE UN COMPENSADOR
ESTÁTICO DE VAR´S EXPERIMENTAL
T E S I S
QUE PARA OBTENER EL TÍTULO DE
INGENIERO ELECTRICISTA
PRESENTAN
LUIS ANTONIO MONTIEL ZAMORA
JOSÉ MANUEL TORRES JIMÉNEZ
ASESOR
M. EN C. MANUEL GARCÍA LÓPEZ.
*. )#+,/$0 %!("&-0'0 %47%0)172 %'%(CD=>?E
!:85+)@
#%()#)*)&, '&$#)+"%#"&, %!"#&%!$,
(<%>(0#E<?8(9,6:E&(E-4+(4-(;C#E3(%B4.%#E@B(1(%E=9/%$E@5/'#&E896)(<-64#2E!#'61*7E2D8(A3#=(6<"E
'#%!( "#( '#&$&(
+1*)1+)42E).)'74+'+67%E
6=)B5#7#B4$:.3*7*1B:/;>14B'+B 547B1#B45&/A3B (,B;/<?2#&0A3B (+%-7#!3"B(+9#87411#8B
7)6+6E'2.)'7+9%E"#):%0)1E24%.E+1(+9+(8%.E .8+6E%1721+2E0217+).E;%024%E
,26)E0%18).E7245)6E-<0)1);E
!+03.)0)17%'+B1E()E81E'203)16%(24E)67E%7+'2E()E9E%4#6E):3)4+0)17%."E
2&,)7+92E()/E7)0%E
1483.4.6=(9I ?6I +748.6<(-79I .<>(>2,7I -.I B(9!<I "=,9#I .C8.925.6=(3$I 8(9(I .B1=(9I 3(EI <7*9.=.6<2H6I 879I ./.,=7I /.9:)6=2I .6I ?6I <2<=.4(I =92/(<1,7$I .6I .3I 3(*79(=7927I -.I .3.,=9H61,(I -.I 87=.6,1(I -.I 3(I .<,?.3(I <?8.;79I -.I 160.61.9F(I 4.,(61,(I!# .3.,=91,(I
".<14.#I.6I3(I?61-(-I(-73/7I378.DI4(I=.7<%I
381726E%E()6%442..%4$E
?@ ,748.6<(-79.<I -.I87=.6,1(I9.(,=1B(I
?@ ,748.6<(,1H6I.6I3G6.(<I3(90(<I
?@ 9.0@3(,1H6I-.I3(I=.6<1H6I.6I47-.37I-.I3G6.(I(.9.(I&I
?@ 1483.4.6=(,2H6I-.IA6I =,9'I
?@ 9.<@3=(-7<I!#,76,3?<176.<I
%9+(E4%0A4);E
()E+1*)1+)4A%E).@'74+'%E #=2*;<9@ ,-@ 3@ 0741@ >(@.6/@
AGRADECIMIENTOS
Página i
AGRADECIMIENTOS
No tengo manera de agradecer a mi padre Antonio Montiel Chávez y a mi madre María Isabel Zamora Cano, porque ellos son los que simplemente me han dado todo, la vida, el amor, la paciencia, la comprensión, los que no me faltaron en ningún día de mi vida y los que me inyectaron las ganas de salir adelante. En verdad no tengo las palabras precisas para agradecer todo lo que han hecho por mí, espero que con esto pueda devolverles un poco de lo mucho que me han dado.
Al Instituto Politécnico Nacional y la Escuela Superior de Ingeniería Mecánica y Eléctrica por otorgarme la oportunidad de formarme con educación de calidad para lograr ser profesionista exitoso, agradezco todo el apoyo brindado durante nuestra instancia, es un orgullo y un sentimiento de responsabilidad portar sus colores, la esencia y espíritu de esta gran institución.
Por ultimo a mi director de tesis al M. en C. Manuel García López, por todo el tiempo y apoyo brindado en la realización de este proyecto. Gracias a sus consejos y sugerencias que ayudaron a mejorar mi formación académica.
AGRADECIMIENTOS
Página ii
“Lo importante en la vida no es el triunfo sino la lucha. Lo esencial no es haber vencido, sino haber luchado bien.”
Agradezco los resultados de este proyecto, a la formación académica del Instituto Politécnico Nacional y a todas las personas que pasaron por mi vida y me dieron su apoyo y palabra de aliento, su abrazo, cariño y fuerza para que se lograra el objetivo de ser un gran profesional y una mejor persona. Gracias a todos los que creyeron en mí, puesto que aquí se tiene el fruto de todas sus energías. Por ello, es para mí un verdadero placer utilizar este espacio para ser justo y consecuente con ellas, expresándoles mis agradecimientos.
A mis padres, como un testimonio de cariño y eterno agradecimiento por mi existencia, valores morales y formación profesional. Porque sin escatimar esfuerzo alguno, han sacrificado gran parte de su vida para formarme y porque nunca podré pagar todos sus desvelos, ni aún con las riquezas más grandes del mundo. Por lo que soy y por todo el tiempo que les robé pensando en mí...
A todos los que directa e indirectamente ayudaron a la realización de este proyecto.
RESUMEN
Página iii
RESUMEN
En este trabajo se realizó la implementación un compensador estático de VARS experimental, con la finalidad de contar con éste en el laboratorio de Electrónica de Potencia y sirva como objeto de estudio para realizar prácticas de compensación de potencia reactiva para futuras generaciones.
Para la realización de este se utilizaron dispositivos electrónicos y el microcontrolador 51MJ128, así como el equipo que se cuenta en el laboratorio de Electrónica de Potencia, para su funcionamiento se diseñó el programa, el circuito de control y de potencia; tal y como lo describe el Capítulo 3.
En el trabajo se realizó la comprobación de nuestros objetivos construyendo y diseñando un compensador estático de VAR´S, el cual permitió variar los parámetros del modelo de línea aérea (MLA). Además en dicho trabajo se describe los resultados y casos posibles que toma MLA.
ÍNDICE DE CONTENIDO
Página iv
INDICE DE CONTENIDO
AGRADECIMIENTOS ... i
RESUMEN ... iii
ÍNDICE DE CONTENIDO ... iv
ÍNDICE DE FIGURAS ... vi
CAPÍTULO 1 INTRODUCCIÓN 1.1 Planteamiento del problema ... 2
1.2 Objetivos ... 2
1.3 Justificación ... 3
1.4 Estado del arte ... 3
1.4.1 Efecto Ferranti ... 3
1.4.2 Tecnología FACTS ... 4
1.4.3 Compensadores de VAR’S ... 4
1.4.3.1 Compensadores tradicionales ... 5
1.4.3.2 Controladores FACTS ... 6
1.4.4 Modelo de línea de transmisión ... 8
1.5 Alcance ... 10
1.6 Descripción de la tesis ... 11
ÍNDICE DE CONTENIDO
Página v
2.1.1 Compensación en líneas de transmisión ... 14
2.2 Compensadores estáticos de VAR´S ... 15
2.2.1 Reactor controlado por tiristor (TCR) ... 15
2.2.2 Capacitor conmutado por tiristor (TSC) ... 18
2.3 Regulación de tensión ... 19
2.4 Sistema de desarrollo digital del microcontrolador MCF51JM128 ... 20
CAPÍTULO 3 REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA 3.1 Sistema de prueba ... 27
3.2 Implementación del sistema de control ... 30
3.3 Programación del sistema Flexis JM128 ... 39
CAPÍTULO 4 RESULTADOS Y CONCLUSIONES 4.1 Modelo de Línea Aérea sin compensar ... 43
4.2 MLA compensada con TCR a 0° ... 47
4.3 MLA compensada con TCR a 15° ... 51
4.4 Reactor Controlado por Tiristores (TCR) ... 56
4.5 Mediciones en el triac ... 62
4.6 Conclusiones ... 63
4.7 Recomendaciones ... 63
ANEXOS ... 64
GLOSARIO ... 74
ÍNDICE DE FIGURAS
Página vi
ÍNDICE DE FIGURAS
CAPÍTULO 1
Figura 1.1 Compensadores de VAR’S ... 5
Figura 1.2 Diagrama circuito T ... 9
Figura 1.3 Diagrama circuito π ... 10
Figura 1.4 Modelo de la L.T. Larga ... 10
CAPÍTULO 2 Figura 2.1 Esquema de compensación ... 13
Figura 2.2 Reactor controlado por tiristores ... 15
Figura 2.3 Control del ángulo de retraso del disparo, semiciclo positivo ... 16
Figura 2.4 Control del ángulo de retraso del disparo, semiciclo negativo ... 17
Figura 2.5 Capacitor conmutado por tiristores ... 19
Figura 2.6 Sistema de desarrollo DEMOJM ... 20
Figura 2.7 Localización de los componentes del sistema de desarrollo DEMOJM .. 22
Figura 2.8 Diagrama esquemático del sistema de desarrollo DEMOJM ... 22
Figura 2.9 Distribución de pines MCF51JM128... 24
CAPÍTULO 3 Figura 3.1 Diagrama físico del sistema de pruebas ... 28
Figura 3.2 Diagrama del sistema de control ... 31
Figura 3.3 Conjunto de transformadores conectados en serie ... 32
Figura 3.4 Circuito detector de cruce por cero ... 33
Figura 3.5 Señal del circuito detector de cruce por cero. a) Filos de subida, y b) Filos de bajada ... 33
ÍNDICE DE FIGURAS
Página vii
Figura 3.7 Señal de referencia y salida del microcontrolador 51MJ128. a) fase A, b) fase B, c) fase C ... 35 Figura 3.8 Diagrama de conexión del optoacoplador ... 36 Figura 3.9 Diagrama de flujo del programa del sistema Flexis JM128. a) Diagrama de flujo del programa principal. b) diagrama de flujo de la interrupción ... 39 Figura 3.10 Declaración e inicialización de variables ... 40 Figura 3.11 Inicialización de los puertos, modo de operación del CPU, reloj e
interrupciones ... 41
CAPÍTULO 4
Figura 4.1 Formas de onda de MLA la entrada de la línea operando en vacío. a) Formas de onda de tensión de línea, b) Formas de onda de tensión de fase y c) Formas de onda de corriente de fase ... 44 Figura 4.2 Espectrograma de la intensidad de corriente y el THD ... 45 Figura 4.3 Mediciones eléctricas de lado de la entrada de la línea operando en vacío. a) Mediciones eléctricas de línea y b) Mediciones eléctricas de fase ... 45 Figura 4.4 Formas de onda de MLA la salida de la línea operando en vacío. a)
ÍNDICE DE FIGURAS
Página viii
Figura 4.12 Mediciones eléctricas de lado de la salida de la línea operando con el
TCR. a) Mediciones eléctricas de línea y b) Mediciones eléctricas de fase ... 51
Figura 4.13 Formas de onda de MLA la entrada de la línea operando con el TCR a 15°. a) Formas de onda de tensión de línea y b) Formas de onda de tensión de fase ... 52
Figura 4.14 Formas de onda de corriente de fase presentadas la entrada de la línea operando con el TCR a 15° ... 52
Figura 4.15 Espectrograma de la intensidad de corriente y el THD ... 53
Figura 4.16 Mediciones eléctricas de lado de la entrada de la línea operando con el TCR a 15°. a) Mediciones eléctricas de línea y b) Mediciones eléctricas de fase ... 53
Figura 4.17 Formas de onda de MLA la salida de la línea operando con el TCR a 15°. a) Formas de onda de tensión de línea y b) Formas de onda de tensión de fase ... 54
Figura 4.18 Formas de onda de corriente de fase presentadas la salida de la línea operando con el compensador con un ángulo de retado de 15° ... 55
Figura 4.19 Espectrograma de la intensidad de corriente y el THD ... 55
Figura 4.20 Mediciones eléctricas de lado de la salida de la línea operando con el TCR a 15°. a) Mediciones eléctricas de línea y b) Mediciones eléctricas de fase ... 56
Figura 4.21 Formas de onda de tensión en el TCR. a) Formas de onda de tensión de fase y b) Formas de onda de tensión de línea ... 57
Figura 4.22 Espectrograma de la intensidad de corriente y el THD ... 57
Figura 4.23 Formas de ondas de corriente en el inductor del TCR ... 58
Figura 4.24 Espectrograma de la intensidad de corriente y el THD ... 58
Figura 4.25 Formas de ondas de corriente y tensión en el inductor del TCR ... 59
Figura 4.26 Formas de ondas de tensión en el inductor del TCR. a) Formas de ondas de tensión de fase y b) Formas de ondas de tensión línea ... 59
Figura 4.27 Espectrograma de la intensidad de corriente y el THD ... 60
Figura 4.28 Formas de ondas de corriente en el inductor del TCR ... 60
Figura 4.29 Espectrograma de la intensidad de corriente y el THD ... 61
Figura 4.30 Formas de ondas de corriente y tensión en el inductor del TCR, cuando opera con un ángulo de retardo de 15° ... 61
Figura 4.31 Formas de ondas de corriente y de pulso de disparo en triac ... 62
CAPÍTULO I
CAPÍTULO 1 INTRODUCCIÓN
Página 2
CAPÍTULO 1
INTRODUCCIÓN
1.1 Planteamiento del problema
En el laboratorio de Electrónica de Potencia de la Escuela Superior de Ingeniería Mecánica y Eléctrica, Unidad Zacatenco no se cuenta con el equipo para poder realizar prácticas de compensación de potencia reactiva experimentalmente, por esto es que se decidió la implementación de un compensador estático de VAR´S (CEV) el cual servirá en las futuras generaciones para realizar dichas prácticas. Se ha delimitado el proyecto a la realización de un reactor controlado por tiristor (TCR) el cual se utilizará para abatir el tensión, cuando una línea experimental se encuentra sin carga.
1.2 Objetivos
• Implementar un compensador estático de VAR´S (TCR) experimental, para evitar la sobretensión por efecto Ferranti en un sistema trifásico; en el Laboratorio de Electrónica de Potencia de la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) en la unidad Adolfo López Mateos.
• Diseñar un compensador estático de VAR´S, TCR (Reactor Controlado por Tiristores).
INTRODUCCIÓN
Página 3
1.3 Justificación
Las líneas de transmisión ocupan un lugar importante en el estudio de las redes eléctricas, debido que son elementos del sistema encargados de transportar la energía desde las lejanas centrales eléctricas de generación hasta los consumidores. Subrayando lo anterior se observa la necesidad de un estudio práctico en la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) en la unidad Adolfo López Mateos
del Instituto Politécnico Nacional, debido que en ella no se cuenta con los recursos para
realizar dichos estudios, para una mejor formación profesional del alumno.
Es por eso que en este proyecto se ha decido diseñar un compensador estático de VAR´S, reactor controlado por tiristores (TCR) de experimentación, en el Laboratorio de Electrónica de Potencia de la Escuela Superior de Ingeniería Mecánica y Eléctrica
(ESIME) en la unidad Adolfo López Mateos; el cual puede aportar la potencia reactiva
necesaria para el control dinámico de la tensión. Para el estudio de la compensación por la cual se buscará la posibilidad de reducir el efecto de la capacitancia de trabajo de las líneas que operan con carga débil, debido a que no se tiene algún tipo de estudio práctico acerca de este efecto en las líneas de transmisión.
1.4 Estado del arte
1.4.1 Efecto Ferranti
El efecto Ferranti es una sobretensión producida en una línea de transmisión larga (mayores a los 250 km), la cual ocurre cuando se desconecta la carga o en su caso la carga es muy ligera. Este efecto es debido a la capacitancia distribuida de la línea.
CAPÍTULO 1 INTRODUCCIÓN
Página 4
1.4.2 Tecnología FACTS
Los sistemas flexibles de transmisión en corriente alterna (FACTS) es una nueva tecnología emergente y su papel principal es aumentar la capacidad de control y de transferencia de potencia en sistemas de CA.
Los dispositivos FACTS son capaces de controlar los parámetros de línea interrelacionados y otras variables de operación que gobiernan el funcionamiento de los sistemas de transmisión, incluyendo impedancia en serie, impedancia en paralelo, corriente, tensión, ángulo de fase y amortiguamiento de oscilaciones a diversas frecuencias inferiores a la frecuencia nominal. Al proporcionar más flexibilidad, los controladores FACTS pueden permitir que una línea de transmisión conduzca potencia en condiciones más cercanas a su especificación térmica nominal[4].
Los dispositivos FACTS pueden clasificarse mediante la forma en que conmutan, ya sea mediante tiristores o de forma autocomutada.
Los equipos FACTS comenzaron a ser implementados al final de la década de los 60´s y a principios de los 70´s por diversos grupos. Pero la denominación de FACTS nació hasta 1988 con unos artículos publicados por Narain G. Hingorani. En México, la utilización de dispositivos FACTS se vio en la época de los 80´s en la Comisión Federal de Electricidad (CFE), siendo los principales proveedores ABB y SIEMENS [3].
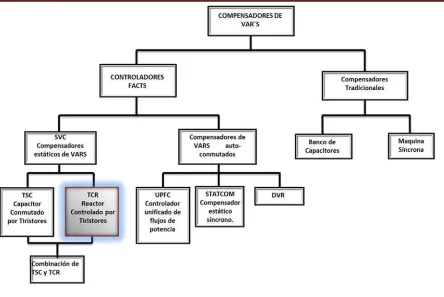
1.4.3 Compensadores de VAR’S
INTRODUCCIÓN
[image:15.612.73.517.66.363.2]Página 5
Figura 1.1 Compensadores de VAR’S.
1.4.3.1 Compensadores tradicionales
En general, los compensadores de VAR´S pueden ser clasificados dependiendo de la tecnología que usan en la implementación y de la manera que son conectados en el sistema de potencia (en paralelo o serie). Compensadores móviles y estáticos son usados comúnmente para la compensación de potencia reactiva.
Capacitores fijos o mecánicamente conmutados
Los capacitores se emplearon por primera vez para la corrección del factor de potencia. La conexión de un capacitor en serie genera potencia reactiva, que autorregula y equilibra una fracción de la reactancia de la línea de transmisión. Esto causa una mejor funcionalidad del sistema de potencia de transmisión:
CAPÍTULO 1 INTRODUCCIÓN
Página 6
• Mejora de la estabilidad de tensión.
• Distribución de energía optimizada entre circuitos paralelos.
Maquinas síncronas o compensadores síncronos
Las maquinas síncronas ha jugado un papel importante en el control de potencia reactiva y de tensión durante más de 50 años. La máquina síncrona se conecta al sistema de potencia y la corriente de campo se ajusta para generar o absorber potencia reactiva según sea necesario por el sistema de C.A. Las maquinas síncronas se han utilizado para mantener tensiones dentro de los limites deseados bajo condiciones de carga variable y situaciones de emergencia [1].
1.4.3.2 Controladores FACTS
El fundamento de los controladores FACTS es utilizar la electrónica de potencia para controlar el flujo de la potencia de una red de transmisión, permitiendo con ello que la línea se cargue hasta su capacidad total. Los dispositivos controlados por electrónica de potencia, como por ejemplo los compensadores estáticos de Volt–Amper Reactivos
(VAR’S) se han usado desde hace muchos años en las redes de transmisión[4].
Compensador Estático de VAR´S (CEV)
Uno de los dispositivos FACTS más importantes es el CEV o generador estático de
VAR´S (SVG, “Static VAR Generator”), el cual puede ser utilizado para el control de tensión y mejorar la estabilidad de los SEP. Un CEV puede aportar la potencia reactiva necesaria para el control de tensión, compensando así los desvíos de potencia reactiva de la red, provocados por grandes variaciones de carga, que podrían provocar variaciones inaceptables de tensión, inestabilidades o hasta colapso del sistema[2].
INTRODUCCIÓN
Página 7
1. Mantener la tensión a un determinado nivel.
2. Mantener la tensión del sistema eléctrico de potencia durante fallas. 3. Mejora del factor de potencia, mediante la compensación de reactivos [3].
La compensación estática de VAR´s en un sistema eléctrico de potencia es conseguida por dispositivos en derivación, como lo son:
a. Control activo continuo: reactor controlado por tiristores (TCR), convertidores de línea conmutada (SCC o LCC).
b. Control activo discontinuo: capacitor conmutado por tiristores (TSC).
Compensador Estático Avanzado
Un compensador avanzado de VAR estático es, en esencia un convertidor fuente de tensión y se llama solo compensador o STATCOM. Este compensador funciona en esencia como un compensador síncrono, en el cual la excitación puede ser mayor o menor que la tensión en terminales. Esta operación permite tener un control continuo de la potencia reactiva, pero a una velocidad mucho mayor, en especial con un convertidor de conmutación forzada, usando algunos GTO, MCT o IGBT.
Las propiedades principales de un STATCOM son:
1. Amplio intervalo de operación para proporcionar reactancia capacitiva aun con tensión bajo
2. Menor especificación nominal que el SVC contraparte convencional, para lograr la misma estabilidad.
CAPÍTULO 1 INTRODUCCIÓN
Página 8
1.4.4 Modelo de línea de transmisión
Una línea de transmisión es el conjunto de dispositivos para transportar o guiar la energía eléctrica desde una fuente de generación a los centros de consumo (las cargas).
Las características de una línea de transmisión se determinan por sus propiedades eléctricas, como la conductancia de los cables y la constante dieléctrica del aislante, y sus propiedades físicas, como el diámetro del cable y los espacios del conductor.
Estas propiedades, a su vez, determinan las constantes eléctricas primarias:
Resistencia de CD en serie (R).
Inductancia en serie (L).
Capacitancia de derivación (C).
Conductancia de derivación (G).
Línea de transmisión corta
Estas líneas no van mas halla de 100 km, operan a tensiones de 69 kV o menores, la característica fundamental para el cálculo eléctrico de estas líneas se basa en las simplificaciones de los parámetros.
Línea de transmisión media
INTRODUCCIÓN
Página 9
Existen dos tipos de cálculos de líneas medias:
1) Circuito T
2) Circuito
Circuito T
Este circuito recibe su nombre debido a su forma que adopta al considerar la capacitancia de la línea, como un parámetro concentrado al centro.
Durante la operación de las líneas de transmisión usualmente los parámetros conocidos de referencia son las cantidades del extremo receptor o de carga (VR, IR), y entonces de
lo que se trata de describir es el comportamiento de las líneas en estado estable, y relacionar las cantidades en el principio de la línea (Vp, Ip). Ver figura 1.2 siguiente.
2
L
j
c j 12
L
j
TZ
0V
2(
t
)
)
(
1t
V
+ -+-Figura 1.2 Diagrama circuito T.
Circuito
Recibe este nombre también por su forma que adopta, la diferencia respecto al circuito
π, es que se considera más exacto, que la susceptancia capacitiva se considera en dos
CAPÍTULO 1 INTRODUCCIÓN
Página 10
R L R L R L
...
[image:20.612.213.396.406.530.2]C/2 C C C C/2
Figura 1.3 Diagrama circuito π.
Línea de transmisión larga
Estas líneas de transmisión tienen longitudes mayores de 250 km, es una solución más exacta se obtiene considerando el efecto exacto de los parámetros distribuidos uniformemente a lo largo de la longitud. Aplicables a tensiones de 230 kV y tensiones mayores. Los efectos capacitivos e inductivos se deben basar a los efectos de campo magnético y campo eléctrico distribuidos a lo largo de la línea [7]. Ver figura 1.4.
Z
Y V
I + ΔI I
V + ΔV
Figura 1.4 Modelo de la L.T. Larga.
1.5 Alcance
Este trabajo se propone realizar la implementación de un reactor controlado por tiristores (TCR) de forma trifásica, del Laboratorio de Electrónica de Potencia de la
INTRODUCCIÓN
Página 11
Mateos, en un simulador experimental. Simulando una línea de transmisión de 360 km
a una tensión de 380 kV con una relación de 1:1000.
1.6 Descripción de la tesis
En este trabajo de tesis se encuentra organizado de la siguiente forma:
En el capítulo 1, se presenta brevemente el estado del arte de los compensadores utilizados para la compensación reactiva y control de tensión, se plantea la problemática encontrada, los objetivos de la tesis, la justificación.
En el capítulo 2 se describe el funcionamiento del TCR y del TSC, la compensación de la línea para mantener un tensión constante, con oscilaciones de la carga. Además se habla acerca de la regulación de tensión de la línea.
En el capítulo 3 se detalla acerca del sistema a prueba, los equipos utilizados y el sistema de control diseñado.
CAPÍTULO 2
COMPENSACIÓN DE LÍNEAS LARGAS
Página 13
CAPITULO 2
COMPENSACIÓN EN
LÍNEAS LARGAS
2.1 Principio de la compensación
En las líneas de transmisión existen dos tipos de compensación: la compensación en serie y en derivación, lo cual se ejemplifica en la figura 2.1. En la compensación serie, se puede introducir un tensión en serie con la línea de transmisión para controlar al extremo de recepción, el cual está en cuadratura con respecto a la corriente de línea, y con ello aumenta la corriente y la potencia transferibles. Cabe mencionar, que el compensador serie no suministra ni absorbe potencia activa [4].
Compensación en serie
Compensación
en derivación L
L
C C
CAPÍTULO 2 COMPENSACIÓN DE LÍNEAS LARGAS
Página 14
En la compensación por derivación se inyecta una corriente al sistema en el punto de conexión. La compensación en derivación consiste en suministrar potencia reactiva a la línea, para aumentar la transferencia de potencia activa manteniendo los niveles de tensión dentro de los rangos aceptables de seguridad [5]. Esto se puede implementar variando una impedancia, una fuente de tensión o una fuente de corriente, todos en derivación. Siempre que la corriente inyectada este en cuadratura de fase con la tensión de la línea, el compensador por derivación solo suministra o consume potencia reactiva variable[4].
2.1.2 Compensación en líneas de transmisión
Se usan inductores y capacitores en las líneas de transmisión de longitud media y larga para incrementar la capacidad de carga de las mismas y para mantener las tensiones cerca de los valores nominales.
Es normal que se instalen reactores en derivación en los puntos seleccionados a lo largo de las líneas, en cada fase al neutro. Los inductores absorben la potencia reactiva y reducen las sobretensiones durante las condiciones de carga ligera. También reducen las sobretensiones transitorias debidas a las maniobras de interruptores y a la caída de rayos. Sin embargo, los reactores en derivación puede reducir la capacidad de carga si no se desconectan en condiciones de plena carga.
COMPENSACIÓN DE LÍNEAS LARGAS
Página 15
2.2 Compensadores estáticos de VAR´S
2.2.1 Reactor controlado por tiristor (TCR)
El reactor controlado por tiristores (TCR) consiste de un arreglo formado por un reactor comúnmente de núcleo de aire e inductancia L y de un interruptor bidireccional (Sw1 y
Sw2) conectado en serie, tal como lo muestra la figura 2.2.
[image:25.612.232.378.240.466.2]2 Sw 1 Sw L
Figura 2.2 Reactor controlado por tiristores.
Principio de Funcionamiento del TCR
CAPÍTULO 2 COMPENSACIÓN DE LÍNEAS LARGAS
Página 16
cerrado. Sin embargo, si el ángulo de disparo del interruptor varia prevalecerá una corriente en el reactor distinta a la obtenida en el estado estacionario.
L sen
V
) (
i
Lt
i
L( 0) [image:26.612.161.450.159.454.2]
Figura 2.3 Control del ángulo de retraso del disparo, semiciclo positivo.
La ecuación (2.1) expresa la corriente instantánea en el reactor en función del ángulo
de disparo (α):
COMPENSACIÓN DE LÍNEAS LARGAS
Página 17
Esta ecuación solo es válida para el rango de . Para el semiciclo negativo de la onda de tensión de CA, la corriente instantánea es expresada por la ecuación (2.2):
L sen
V
t
) 0 (
iL
) (
i
L i [image:27.612.149.462.175.413.2]v,
Figura 2.4 Control del ángulo de retraso del disparo, semiciclo negativo.
(2.2)
En base a la ecuación (2.2) se observa que la magnitud de la corriente en el reactor se puede variar mediante el ángulo de disparo del tiristor. La corriente efectiva a través del reactor puede expresarse como:
(2.3)
Donde
CAPÍTULO 2 COMPENSACIÓN DE LÍNEAS LARGAS
Página 18
= frecuencia angular de la tensión aplicada de CA.
Por lo tanto la admitancia efectiva del reactor en función de , se calcula con la ecuación (2.4):
(2.4)
Al sustituir la ecuación (2.3) en (2.4) se obtiene la admitancia efectiva BL del reactor,
ecuación (2.5), en función del ángulo de disparo de los tiristores:
(2.5)
Así mismo se observa la relación que existe entre la admitancia y la corriente del reactor; por lo tanto para cada ángulo de disparo, se tiene una admitancia .
Cuando se va a reduciendo el ángulo de conducción del TCR, se tiene dos efectos importantes. Primero, es que las pérdidas disminuyen en los tiristores y en el reactor del TCR. Segundo, la forma de corriente llega a ser menos senoidal, por lo tanto el TCR genera corrientes armónicas[3].
2.2.2 Capacitor conmutado por tiristor (TSC)
El capacitor conmutado por tiristores figura 2.5, consiste en una capacitancia fija C, un interruptor bidireccional basado en dos tiristores (Sw1 y Sw2) conectados en antiparalelo
COMPENSACIÓN DE LÍNEAS LARGAS Página 19 C L 2 Sw 1 Sw
Figura 2.5 Capacitor conmutado por tiristores.
En el interruptor bidireccional, para conectar el condensador (C) se disparan los dos tiristores al mismo tiempo empezando a conducir tan pronto estén polarizados positivamente. Para la desconexión se anula la señal de disparo y los tiristores se apagarán en el instante en que la corriente que los atraviesa cruce por cero. La actuación del interruptor estático es prácticamente instantánea, por consiguiente, se puede elegir como instante de conexión aquel en que el valor de la tensión de alimentación provoque la menor corriente transitoria.
2.3 Regulación de tensión.
La regulación de tensión se puede definir como “el cambio en la tensión en el extremo receptor de la línea cuando la carga varía de en vacío hasta un carga plena especificada, con un factor de potencia especificado, mientas la tensión en el extremo
CAPÍTULO 2 COMPENSACIÓN DE LÍNEAS LARGAS
Página 20
(2.6)
En donde:
%RT es la regulación de tensión en porcentaje.
|VREV| es la magnitud de la tensión en el extremo receptor en vacío.
|VRPC| es la magnitud de la tensión en ese mismo extremo a plena carga.
En las líneas de transmisión largas, las tensiones decrecen cuando están muy cargadas y aumentan cuando están cargadas ligeramente. Cuando la tensión en la línea de alta tensión se mantiene dentro de un ±5% de la nominal, no se encuentran problemas de operación. Es por eso que se tiene la necesidad de regular la tensión mediante la tecnología FACTS.
2.4 Sistema de desarrollo digital del microcontrolador MCF51JM128
Este sistema de desarrollo DEMOJM soporta los microcontroladores de Freescale MCF51JM128 y MCF51JM128, que pueden ser intercambiables como se muestra en la figura 2.6.
COMPENSACIÓN DE LÍNEAS LARGAS
Página 21
Los contenidos más importantes del sistema DEMOJM son mostrados en la figura 2.7 y son los que se describen a continuación:
Un analizador lógico de dos canales, que puede ser utilizado para la visualización de datos en tiempo real sobre un PC.
Un conector asimétrico para la inserción de los MCU´s (MC9S08JM60 o MCF51JM128), llamado JM DAUGHTER CARD.
Una interface embebida P&E MULTILINK, para la programación y depuración de los programas.
Puerto SCI conectado, vía puentes, a la interface embebida P&E MULTILINK.
Interruptor ON/OFF con indicador LED.
Conector de fuente externa entre 6 V cd y 8 V cd.
Pulsador de RESET e indicador LED
USB a conector Mini AB.
Modulo CAN.
Acelerómetro de tres ejes.
Ocho LED´s de usuario.
Cuatro pulsadores de usuario.
Puertos ICC con pullups. Un potenciómetro de 10 K.
Selección, vía puentes, de la tensión de alimentación entre las siguientes fuentes:
o Desde el MULTILINK embebudo.
o Desde fuente externa.
o Desde el conector Mini AB.
CAPÍTULO 2 COMPENSACIÓN DE LÍNEAS LARGAS
[image:32.612.156.458.97.342.2]Página 22
Figura 2.7 Localización de los componentes del sistema de desarrollo DEMOJM.
En la figura 2.8 se muestra el diagrama esquemático del sistema de desarrollo, la cual muestra la distribución de los pines de cada puerto [13].
[image:32.612.151.457.450.669.2]COMPENSACIÓN DE LÍNEAS LARGAS
Página 23
Microcontrolador MCF51JM128
El MCF51JM128 es un microcontrolador miembro de la familia ColdFire® V1. La máquina ColdFire® V1 viene implementada sobre una arquitectura de programación llamada ISA-C. El microcontrolador MCF51JM128 es un miembro de la familia Flexis el cual tiene un sistema de 32 bits.
Una de las características de la familia Flexis de Freescale es el “Controller Continuum”,
que es la compatibilidad total entre pines periféricos y herramientas de desarrollo entre los microcontroladores de 8 bits (arquitectura HCS08) y los microcontroladores de 32 bits (arquitectura ColdFire V1)[13].
El microcontrolador MCF51JM128 ha sido potenciado con los siguientes componentes y/o características internas:
Núcleo ColdFire® V1 en arquitectura RISC, con puerto para depuración y programación BDM (Background Debug Module).
Velocidad de reloj de hasta 55.33 MHz.
Hasta 128 KB de memoria FLASH.
Hasta 16 KB de memoria SRAM.
Generación de reloj interno
Puerto USB-OTG (USB On The Go).
Puerto CAN (Controller Area Network).
Unidad aceleración criptográfica.
Modulo generación de números aleatorios.
Comparadores analógicos.
Hasta 12 conversores A/D de 12 bits.
Dos puertos IIC (Inter Integrated Circuit).
Dos puertos SPI (Serial Peripherial Interface).
Dos puertos SCI (Serial Comunication Interfase).
CAPÍTULO 2 COMPENSACIÓN DE LÍNEAS LARGAS
Página 24
Hasta 8 canales temporizadores/modulares de ancho de pulso TPM (Timer PWM Module).
Contador de tiempo real RTC (Real Time Counter).
Hasta 51/66 pines I/O de propósito general en versiones de 64/80 pines respectivamente.
Interfase para teclado KBI (KeyBoard Interrupts).
[image:34.612.196.421.306.524.2]Se entiende que las asignaciones, de pines, actuales obedecen a criterios de inmunidad de C.I. (Circuito Integrado), a la presencia de EMI (ElectroMagnetic Interferences). La figura 2.9 muestra la distribución de pines para el microcontrolador MCF51JM128 [8].
Figura 2.9 Distribución de pines MCF51JM128.
Modos de operación del microcontrolador MCF51JM128
Las maquinas ColdFire® V1 tienen la capacidad de trabajar en distintos modos de funcionamiento, dentro de los cuales se puede mencionar:
COMPENSACIÓN DE LÍNEAS LARGAS
Página 25
ejecución del software del usuario. Este modo puede ser usado para borrar y reprogramar la memoria FLASH después de que esta ha sido programada.
Modo seguro: mientras que el microcontrolador se encuentre en modo seguro, existen muchas restricciones aplicadas a los comandos del depurador.
Modo RUN: es el modo normal de operación y el más común, porque es el modo en el que el usuario puede ejecutar su código. La máquina reconoce la solicitud de entrada al modo cuando el pin BKGD/MS es llevado a alto con el flanco de bajada de la señal interna de RESET.
Modos de WAIT: para entrar en este modo de bajo consumo es necesario ejecutar la instrucción STOP.
Modo normal de WAIT: la CPU queda en modo STOP y el consumo reduce significativamente, dado a que el reloj es interrumpido.
Modo LPWAIT: la diferencia respecto al modo normal de WAIT es que el regulador de la CPU sale de regulación y que queda en estado standby,
esto reduce enormemente el consumo de la máquina, consumo que puede ser reducido aún más deshabilitando los módulos que no se utilicen [8].
Lenguajes de programación
Elmicrocontrolador MCF51JM128 se puede programar por los siguientes lenguajes de programación:
Assembler: Toda máquina deberá soportar programación en su lenguaje nativo, que se acerque de manera directa a su núcleo. Este lenguaje es llamado assembler y no debe ser ignorado por ningún programador, aun teniendo el mejor compilador en otros lenguajes.
CAPÍTULO 3
REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 27
CAPÍTULO 3
REGULACIÓN DE TENSIÓN
EN UN MODELO DE LÍNEA
3.1 Sistema de prueba
En esta red de alimentación, las tensiones y corrientes tienen una escala de 1:1000, los valores de potencia resultante están a una escala de 1:1,000,000. La tabla 3.1 muestra los valores equivalentes:
Tabla 3.1 Valores equivalentes de las líneas.
Red real Modelo de línea
1 kV 1 kV
1 kA 1 kA
1 MW 1 MW
1 MVA 1 MVA
Con el fin de poder convertir los valores de corriente y tensión medidos en la prueba es necesario multiplicar por un factor de 1000. En el caso de los valores de medición de potencia se requiere el factor 1,000,000.
CAPÍTULO 3 REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 28
Figura
3
.1
Dia
gr
ama
f
ís
ic
o d
el
sis
tem
a de
prue
bas
.
a)
b)
c)
[image:38.612.67.517.80.712.2]REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 29
A. Unidad de alimentación trifásica DL 2108TAL: Unidad de alimentación para la conexión a la red trifásica con neutro, con interruptor de red cuadripolar de levas e interruptor diferencial de 25 A. La salida cuenta con lámparas de identificación por fase [9].
B. Interruptor de potencia DL 2108T02: Interruptor de potencia trifásico con contacto auxiliar normalmente cerrado, con capacidad de carga del contacto de 400 Vac, 3 A [10].
C. Transformador trifásico DL 1080TT: Cuenta con tres bobinados, el bobinado primario de 3 x 380 con toma intermedia de 220 V, conexión estrella o triangulo. El bobinado secundario de 3 x 220 V, con tomas intermedias de +5%, -5%, -10%, -15% conexión en estrella, para la alimentación de tensión de línea de 3 x 380 V varias conexiones posibles en estrella, potencia nominal de 800 VA. El bobinado terciario 3 x 220 V conexión triangulo para estabilizar el tercer armónico de tensión, con potencia nominal de 266 VA [11].
CAPÍTULO 3 REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
[image:40.612.129.481.119.423.2]Página 30
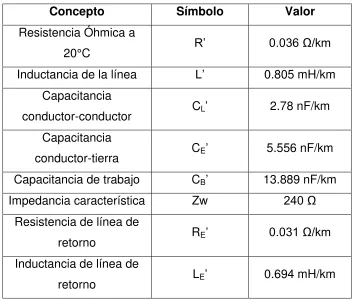
Tabla 3.2 Características eléctricas del modelo de línea
Concepto Símbolo Valor
Resistencia Óhmica a
20°C R’ 0.036 Ω/km
Inductancia de la línea L’ 0.805 mH/km Capacitancia
conductor-conductor CL’ 2.78 nF/km Capacitancia
conductor-tierra CE’ 5.556 nF/km Capacitancia de trabajo CB’ 13.889 nF/km
Impedancia característica Zw 240 Ω
Resistencia de línea de
retorno RE’ 0.031 Ω/km
Inductancia de línea de
retorno LE’ 0.694 mH/km
3.2 Implementación del sistema de control
El funcionamiento del sistema de control, consiste principalmente en la estimación de las ondas de corriente, en base a la onda de tensión de fase, producida por el sistema de pruebas. Debido a dicha estimación se consideró los siguientes puntos para el correcto funcionamiento del sistema de control:
Sistema balanceado. Debido a que se tiene un tiempo constante en los disparos de los triac´s, en un sistema desbalanceado los disparos no serían en los tiempos deseados, a consecuencia que se tomó una tensión de fase de referencia.
REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 31
Conexión estrella de los TCR. La implementación se realizó para una conexión estrella de los TCR, si se realizara con una conexión delta se debe estimar otros tiempos de disparo de los triac´s debido que la corriente que circula se comporta de manera distinta. En otro caso para el funcionamiento en conexión delta se debe tomar en cuenta otra referencia.
Inductor del TCR. Se debe tener en cuenta tanto la parte resistiva e inductiva del TCR, debido a la parte resistiva provoca un pequeño adelanto a la corriente, provocando modificación del tiempo de disparo en los triac´s.
La figura 3.2 muestra el diagrama del sistema de control. La implementación del sistema de control esta proporcionada por los siguientes componentes:
A. Conjunto de transformadores conectados en serie. B. Circuito detector de cruce por cero.
C. Microcontrolador. D. Circuito aislador. E. TCR.
TP MICROCONTROLADOR 51JM128 LA N MOC 3010 LB LC L1 CIRCUITO DETECTOR DE CRUCE POR CERO
L2 L3
A B C D
[image:41.612.91.515.347.679.2]E
CAPÍTULO 3 REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 32
A. Transformadores
En el sistema de control es imposible trabajar con tensiones de un valor considerablemente grandes, es por eso que se tiene la necesidad de tener que reducir la tensión a valores con los cuales no se dañe el sistema de control. En la implementación se utilizó tres transformadores de 120 V/ 12 V, conectados en serie, tomando para el funcionamiento del detector de cruce por cero una tensión de 12 V en la salida del secundario se agregó un diodo DR en serie con la señal de salida del
transformador, para evitar el ingreso del ciclo negativo de la señal. La figura 3.3 se muestra la conexión del conjunto de transformadores.
TP
*
*
*
[image:42.612.221.392.289.454.2]DR
Figura 3.3 Conjunto de transformadores conectados en serie.
B. Circuito detector de cruce por cero
REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 33
10kΩ
VDD 5V
5.6kΩ 2MΩ
VDD 5V
20kΩ
LM311
Vref
Señal de salida al microcontrolador DR
Figura 3.4 Circuito detector de cruce por cero.
Al circuito detector de cruce de cero entra la señal rectificada de media onda, la cual se compara con la onda de un valor aproximado a cero que es generado por un divisor de tensión. Así cuando la señal de 6 V de AC sea menor que dicho valor, el amplificador operacional producirá un pulso con una amplitud de 6 V. Posteriormente la amplitud del pulso se reduce a 5 V para que pueda ser manejado por el microcontrolador quien se encarga de generar la señal de control. En la figura 3.5 se muestra la señal de salida de 5 V que es obtenida del detector de cruce por cero.
a)
b)
CAPÍTULO 3 REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 34
C. Microcontrolador
Para poder generar las variaciones de admitancia por medio del TCR es necesario controlar la señal de disparo que reciben los triac´s en el momento adecuado. Para controlar este disparo se programa el microcontrolador 51MJ128.
El proceso de control es el siguiente: el microcontrolador recibe la señal proveniente del circuito detector de cruce por cero, la cual inicializa una variable dentro del programa. El microcontrolador detecta tanto los filos de subida, como los filos de bajada. Cuando un filo de subida o filo de bajada es detectado inmediatamente realiza un retardo y se envía un pulso corto a cada triac, de cada fase a tiempos establecidos. Este proceso se repite cada cruce por cero de la señal de referencia.
El microcontrolador 51MJ128 utiliza dos botones pulsadores, uno de ellos nos permite aumentar el ángulo de retardo en 15° y otro botón pulsador el cual nos admite tener un ángulo de retardo de 0° aumentando el ángulo de disparo generado por el microcontrolador. El microcontrolador fue programado para indicar tanto las señales de entrada como las de salida como se muestra en la figura 3.6.
SALIDA FASE “A” SALIDA FASE “B”
SALIDA FASE “C”
SEÑAL DE ENTRADA
INDICADORES DE LAS SEÑALES DE SALIDA INDICADOR DE LA
[image:44.612.129.479.434.687.2]SEÑAL DE ENTRADA CONTROLADOR DEL ÁNGULO DE RETARDO
REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 35
En la siguiente figura 3.7 se muestra las señales los disparos controlados y producidos por el microcontrolador, tomadas del sistema de control. La señal senoidal es la
referencia tomada de la “Fase A” del sistema de pruebas, mostrando los tiempos en
que se realiza los disparos a los triac´s.
SEÑAL DE REFERENCIA
PULSOS DE LA FASE A
SEÑAL DE REFERENCIA
PULSOS DE LA FASE B
SEÑAL DE REFERENCIA
PULSOS DE LA FASE C
a)
b)
[image:45.612.71.549.173.576.2]c)
CAPÍTULO 3 REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 36
D. Circuito aislador
Después de generar la señal de control es necesario construir un circuito que nos permita acoplar la etapa de control de la etapa de potencia. La señal de control que es producida por el microcontrolador debe llegar al tiristor. Sin embargo no es posible conectar de manera directa el microcontrolador y el triac, fue por eso que surgió la necesidad de instalar un circuito que permita acoplar el circuito de potencia con el circuito de control, esto se llevó a cabo mediante un optoacoplador MOC3011.
La razón principal de realizar dicho acoplamiento es por protección del microcontrolador, ya que si ocurre un cortocircuito en el circuito de potencia, o cualquier tipo de anomalía eléctrica, el optoacoplador protege todos los elementos del circuito del sistema de control. Ver figura 3.8.
1
2
3 4
5 6
MOC3010M MOC3011M MOC3012M
180
Vcc V sistema60Hz
Rload
Figura 3.8 Diagrama de conexión del optoacoplador.
REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 37
E. TCR
Para un correcto funcionamiento del reactor controlado por tiristores (TCR) es necesario elegir el valor adecuado de la impedancia del inductor. Para ello se debe calcular la a potencia reactiva capacitiva del modelo de línea aérea, a partir de la capacitancia de trabajo de la línea, para calcularlo se utiliza las ecuaciones (3.1) y (3.2) [12].
(3.1)
(3.2)
QC debe ser igual a QC medida en la entrada, cuando la línea no tiene carga. Para la
implementación se contó con banco de inductores de 300 VAR´S, de 7 pasos. Para la compensación de la línea solo se necesita un solo paso de dicho juego de inductores. La potencia reactiva monofásica del banco de inductores, tomando el primer paso es:
La potencia reactiva trifásica del banco de inductores dada por:
La potencia reactiva monofásica del banco de inductores, tomando el segundo paso es:
La potencia reactiva trifásica del banco de inductores está dada por:
CAPÍTULO 3 REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 38
Se puede observar que la potencia reactiva del segundo paso es mayor que la potencia reactiva capacitiva producida por la línea, lo que provocaría una disminución de la tensión nominal de la línea, es por eso que para el inductor del TCR, se eligió el primer paso del banco de inductores.
Por lo tanto el valor de la inductancia del TCR es:
(3.3)
Para obtener el valor de la inductancia del TCR implementado se parte de la siguiente ecuación:
(3.4)
De la ecuación (3.4) se tiene:
Para la elección de los triac´s, es necesario basarse en la corriente máxima que circulara por el inductor, en base al valor de XL, la corriente por fase está dada por:
REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 39
3.3 Programación del sistema Flexis JM128
La figura 3.9 muestra el diagrama de flujo para programar los disparos de los triac´s, basándose en el sistema de desarrollo Flexis SM USB Microcontroller Family, JM128. Este sistema se programa en lenguaje C y el código completo se muestra en el anexo 1.
INICIO
INCIALIZACIÓN DE: -VARIABLES
-PUERTOS -CPU
For (;;)
FIN
INICIO
INPUT_1
new_DC =2909
INPUT_2
new_DC =0
Delay( 13691 + new_DC )
Se inicializa la interrupción
FIN
[image:49.612.83.531.230.590.2]a)
b)
Figura 3.9 Diagrama de flujo del programa del sistema Flexis JM128. a) Diagrama de flujo del programa principal. b) diagrama de flujo de la interrupción.
CAPÍTULO 3 REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
Página 40
/* Archivos de cabecera */
#include <hidef.h> //macro para interrupciones
#include "derivative.h" //macro de declaraciones del MCU
/* Declaración de variables y constantes */
byte bandera=0; //bandera de propósito general
unsigned long valor_canal_0=0;
unsigned long retardo=0; //parámetro para hacer retardo
char i=0; //variable de iteración
//Salida, pulsos
char PTDD_Config=0; //byte de inicialización del registro PTDD
char PTDDD_Config=0; //byte de inicialización del registro PTDDD
char PTDPE_Config=0; //byte de inicialización del registro PTDPE
char PTDSE_Config=0; //byte de inicialización del registro PTDSE
char PTDDS_Config=0; //byte de inicialización del registro PTDDS
[image:50.612.89.522.75.502.2]char PTDIFE_Config=0; //byte de inicialización del registro PTDIFE
Figura 3.10 Declaración e inicialización de variables
REGULACIÓN DE TENSIÓN EN UN MODELO DE LÍNEA
[image:51.612.111.473.100.493.2]Página 41
Figura 3.11 Inicialización de los puertos, modo de operación del CPU, reloj e interrupciones.
El programa trabaja en base a una interrupción como se describe a continuación:
Una vez que se ejecuta el programa; este espera hasta que se detecta un filo de subida o de bajada para interrumpir el programa principal y ejecutar un programa que lee las señales de dos botones pulsadores para atrasar los pulsos que se envían a los triac´s.
/* Función principal */
void main (void) {
Disable_COP(); //deshabilita el COP
PTG_Init(0x00,0x00,0xFF,0x00,0x00,0xFF); //pines inician en "0",pines como entrada, pullups, no slew, no strength y si
// Inicialización del reloj:
MCGTRM = NVMCGTRM + 52; //Tome valor programado de fábrica del TRIM
MCGC1 = 0x04; //Modo FEI divisor por 1
MCGC2 = 0x00; //Desactiva modo de reloj externo
MCGC4 = 0x22; //Rango alto del DCO
//El reloj MCGOUT queda en 24999945 Hz
TPM1_Init(0x08,0x4C); //modo PWM EDGE ALIGN, reloj bus interno, divisor por 1, interr por canal
EnableInterrupts; //habilita interrupciones
CAPÍTULO 4
RESULTADOS Y CONCLUSIONES
Página 43
CAPITULO 4
RESULTADOS Y
CONCLUSIONES
4.1 Modelo de Línea Aérea sin compensar.
Éste capítulo presenta los resultados obtenidos al implementar el TCR en el modelo de línea aérea (MLA). Para las pruebas se consideró el caso de operación cuando el MLA está sin carga, realizando mediciones en cada parte del sistema.
En las mediciones de los diferentes casos se utilizó un analizador de calidad de la energía eléctrica trifásico de la marca Fluke, Serie 430. Se eligió este analizador debido a que se pueden obtener las formas de ondas instantáneas de las principales características de una red eléctrica, además de monitorear sus variaciones en el tiempo. El analizador cuenta con un sistema de medición de multitareas, por lo que maneja simultáneamente todas las funciones de detección, medición, registro continuo y presentación de formas de onda de los diferentes parámetros.
CAPÍTULO 4 RESULTADOS Y CONCLUSIONES
Página 44
Los valores y graficas muestran que las pruebas se realizaron en un sistema balanceado, aunque existan valores de corriente en el neutro, los valores son considerablemente bajos.
La figura 4.1, a, b y c muestra un sistema balanceado, donde los valores se aproximan a los valores nominales.
a)
b)
[image:54.612.74.544.192.637.2]c)
Figura 4.1 Formas de onda de MLA la entrada de la línea operando en vacío. a) Formas de onda de tensión de línea, b) Formas de onda de tensión de fase y c)
RESULTADOS Y CONCLUSIONES
Página 45
En la figura 4.2 muestra el espectro armónico de la intensidad en la entrada del SEP, en esta se observa las componentes armónicas así como el THD (Total Harmonic Distorsion), de la intensidad de corriente.
Figura 4.2 Espectrograma de la intensidad de corriente y el THD.
En base a los resultados obtenidos se observa en la figura 4.3, que la potencia reactiva es capacitiva, la cual debe ser igualada por el compensador estático de VAR´s, para regular la tensión al final de la línea.
a)
b)
CAPÍTULO 4 RESULTADOS Y CONCLUSIONES
Página 46
Los siguientes resultados exponen el comportamiento de MLA al final de la línea cuando opera sin carga. En este caso solo se registró el valor de las tensiones, debido a que se opera sin carga no hay corriente de carga.
Como se puede observar en el final de la línea existe un incremento de tensión con respecto a lado de la entrada, debido al efecto capacitivo de la línea, además se muestra que el sistema no es desbalanceado debido a que hay variación de los parámetros entre las fases del MLA.
a)
b)
Figura 4.4 Formas de onda de MLA la salida de la línea operando en vacío. a) Formas de onda de tensión de línea y b) Formas de onda de tensión de fase.
RESULTADOS Y CONCLUSIONES
Página 47
a)
b)
Figura 4.5 Mediciones eléctricas de lado de la salida de la línea operando en vacío. a) Mediciones eléctricas de línea y b) Mediciones eléctricas de fase.
4.2 MLA compensada con TCR a 0°.
La figura 4.6, muestra la tensión trifásica del MLA compensada con el TCR en un ángulo de disparo de 0° en la entrada del MLA. En esta figura se observa una disminución de la tensión, así mismo, la tensión en el neutro aumento, esto se debe por que el valor de los inductores no es exactamente el mismo.
a)
b)
CAPÍTULO 4 RESULTADOS Y CONCLUSIONES
Página 48
En la figura 4.7, se observa que existe una disminución de corriente, esto se debe por la absorción de corriente producida por los inductores del TCR, además se observa un aumento de distorsión en la onda de corriente cuando se trabaja con el compensador TCR.
Figura 4.7 Formas de onda de corriente de fase presentadas la entrada de la línea operando con el TCR.
Como lo muestra la figura 4.8, existe un aumento en la aparición de componentes de corriente directa y un pequeño aumento en la distorsión armónica total, esto explica por qué aumenta la distorsión en la onda de la corriente.
RESULTADOS Y CONCLUSIONES
Página 49
En cuestión a las mediciones de potencia, en las figuras 4.9, se observa claramente una compensación en el sistema, debido a que el valor de la potencia reactiva disminuyo.
[image:59.612.81.531.173.378.2]a)
b)
Figura 4.9 Mediciones eléctricas de lado de la entrada de la línea operando con el TCR. a) Mediciones eléctricas de línea y b) Mediciones eléctricas de fase.
Los siguientes resultados exponen el comportamiento del sistema de pruebas cuando opera con el compensador, del lado de la salida del sistema.
CAPÍTULO 4 RESULTADOS Y CONCLUSIONES
Página 50
a)
b)
Figura 4.10 Formas de onda de MLA la salida de la línea operando con el TCR. a) Formas de onda de tensión de línea y b) Formas de onda de tensión de fase.
[image:60.612.71.524.69.280.2]En la figura 4.11 se muestra un desbalanceo de corriente, esto se debe a que los inductores tienen valores similares y no son exactamente iguales, esto provoco además diferentes caídas de tensión como se observó en la figura 4.10.
RESULTADOS Y CONCLUSIONES
Página 51
La figura 4.12 se muestra los valores de potencia los cuales se consideraron del compensador estático de VAR´S, estos valores se observan son del tipo inductivo.
a)
b)
Figura 4.12 Mediciones eléctricas de lado de la salida de la línea operando con el TCR. a) Mediciones eléctricas de línea y b) Mediciones eléctricas de fase.
4.3 MLA compensada con TCR a 15°.
Los siguientes resultados presentan las ondas del lado de la entrada del simulador de la línea de transmisión aérea cuando se hace operar el CEV manejando un ángulo de retardo en la señal de disparo en los triac´s.
CAPÍTULO 4 RESULTADOS Y CONCLUSIONES
Página 52
a)
b)
Figura 4.13 Formas de onda de MLA la entrada de la línea operando con el TCR a 15°. a) Formas de onda de tensión de línea y b) Formas de onda de tensión de
fase.
[image:62.612.86.528.68.272.2]La figura 4.14 muestra que hay una distorsión de las ondas de corriente, esto se debe a la existencia de armónicos y la aparición de componentes de corriente directa. Cabe mencionar que la figura 4.15 muestra el aumento del THD y de componentes de corriente directa, con respecto al caso anterior.
RESULTADOS Y CONCLUSIONES
[image:63.612.86.526.446.661.2]Página 53
Figura 4.15 Espectrograma de la intensidad de corriente y el THD.
La figura 4.16 expone en sus resultados una disminución de la potencia reactiva del tipo inductiva, debido que a diferencia del caso anterior sobresale la potencia reactiva del tipo capacitiva. Lo que significa que al disminuir el ángulo de conducción de los triac´s, disminuye la potencia absorbida por los reactores del TCR.
a)
b)
CAPÍTULO 4 RESULTADOS Y CONCLUSIONES
Página 54
Los siguientes resultados exponen el comportamiento del sistema de pruebas cuando opera con el compensador con un ángulo de retardo de 15, del lado de la salida del sistema.
La figura 4.17 muestra que al disminuir el ángulo de conducción de los triac´s, la tensión medida al final de la línea aumenta significativamente con respecto a la tensión medida cuando el compensador trabaja a toda su capacidad.
a)
b)
Figura 4.17 Formas de onda de MLA la salida de la línea operando con el TCR a 15°. a) Formas de onda de tensión de línea y b) Formas de onda de tensión de
fase.
RESULTADOS Y CONCLUSIONES
Página 55
Figura 4.18 Formas de onda de corriente de fase presentadas la salida de la línea operando con el compensador con un ángulo de retado de 15°.
Figura 4.19 Espectrograma de la intensidad de corriente y el THD.
CAPÍTULO 4 RESULTADOS Y CONCLUSIONES
Página 56
[image:66.612.71.534.68.276.2]a)
b)
Figura 4.20 Mediciones eléctricas de lado de la salida de la línea operando con el TCR a 15°. a) Mediciones eléctricas de línea y b) Mediciones eléctricas de fase.
4.4 Reactor Controlado por Tiristores (TCR).
RESULTADOS Y CONCLUSIONES
Página 57
a)
b)
[image:67.612.85.532.69.274.2]Figura 4.21 Formas de onda de tensión en el TCR. a) Formas de onda de tensión de fase y b) Formas de onda de tensión de línea.
Figura 4.22 Espectrograma de la intensidad de corriente y el THD
CAPÍTULO 4 RESULTADOS Y CONCLUSIONES
Página 58
Figura 4.23 Formas de ondas de corriente en el inductor del TCR.
Figura 4.24 Espectrograma de la intensidad de corriente y el THD.
RESULTADOS Y CONCLUSIONES
Página 59
Señal de la onda
de tensión Señal de la onda de corriente
Momentos del disparo de los triac´s
Figura 4.25 Formas de ondas de corriente y tensión en el inductor del TCR.
La figura 4.26 a, muestra la tensión medida en los inductores del TCR cuando opera con un ángulo de retardo de 15°, la cual muestra una discontinuidad en la onda senoidal de tensión mayor que el caso anterior, debido que es afectado por el momento en que le llegan los pulsos a los triac´s. Las ondas de tensión de línea mostrada por la figura 4.26 b, muestran dos discontinuidades, se observa que en ambas figuras los valores de tensión RMS disminuyeron al caso anterior.
[image:69.612.87.529.461.677.2]a)
b)
CAPÍTULO 4 RESULTADOS Y CONCLUSIONES
Página 60
Por otra parte en las figura 4.27 muestra que presenta un aumento en la distorsión armónica y que no existe presencia de ningún componente de corriente directa.
Figura 4.27 Espectrograma de la intensidad de corriente y el THD.
La figura 4.28 muestra la corriente medida por el TCR la cual solo presenta una distorsión armónica. Se observa que las ondas senoidales que existe una deformación, además de que su valor RMS también disminuyo. En la figura 4.29 expone un aumento de los componentes de corriente directa y la distorsión armónica que presenta el TCR con respecto a los resultados anteriores.
Momentos del disparo de los triac´s
RESULTADOS Y CONCLUSIONES
Página 61
Figura 4.29 Espectrograma de la intensidad de corriente y el THD.
La figura 4.30 muestra las señales de tensión y de corriente de la Fase A, la cual muestra que los disparos de los triac´s son realizados después de que la corriente cruza por cero.
Señal de la onda de tensión
Momentos del disparo de los triac´s
Señal de la onda de corriente






![figura 2.9 muestra la distribución de pines para el microcontrolador MCF51JM128 [8].](https://thumb-us.123doks.com/thumbv2/123dok_es/4972940.75810/34.612.196.421.306.524/figura-muestra-distribucion-pines-microcontrolador-mcf-jm.webp)