INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
DETERMINACIÓN DE LA SENSIBILIDAD
Y EFECTOS DE AGENTES EXTERNOS EN
GALGAS EXTENSOMÉTRICAS
TESIS
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS
EN INGENIERÍA MECÁNICA
PRESENTA:
ING. GABRIEL ESQUER ACEVES
DIRECTORES DE TESIS:
DR. GUILLERMO URRIOLAGOITIA SOSA
DR. GUILLERMO MANUEL URRIOLAGOITIA
CALDERÓN
CARTA CESIÓN DE DERECHOS
En la Ciudad de México, D.F. el día 28 del mes de Junio del año 2013, el que suscribe Ing. Gabriel Esquer Aceves, alumno del Programa de Maestría en Ciencias en Ingeniería Mecánica, con número de registro B110861, adscrito a la Sección de Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Zacatenco, manifiesto(a) que es el autor intelectual del presente trabajo de Tesis bajo la dirección del Dr. Guillermo Urriolagoitia Sosa y el Dr. Guillermo Manuel Urriolagoitia Calderón y cede los derechos del trabajo titulado Determinación de la sensibilidad y efectos de agentes externos en galgas extensométricas, al Instituto Politécnico Nacional para su difusión, con fines académicos y de investigación.
Los usuarios de la información no deben reproducir el contenido textual, gráficas o datos del trabajo sin el permiso expreso del (de la) autor(a) y/o director(es) del trabajo. Este puede ser obtenido escribiendo a la siguiente dirección: [email protected]. Si el permiso se otorga, el usuario deberá dar el agradecimiento correspondiente y citar la fuente del mismo.
Ing. Gabriel Esquer Aceves
AGRADECIMIENTOS
AL CREADOR DEL UNIVERSO
Con todo agradecimiento a mis padres: Sr. Rolando Enrique Esquer Gutiérrez
Sra. Candelaria Aceves Villavicencio (q.e.p.d)
A mi esposa:
Sra. Delia Cuadras Zavala, por su apoyo incondicional Con cariño a mis hijos Abner Yeshúa y Frida Argentina
AGRADECIMIENTOS
A mis profesores y directores de tesis: Dr. Guillermo Urriolagoitia Sosa y Dr. Guillermo Manuel Urriolagoitia Calderón. Por el gran apoyo brindado a mi persona, que con lo cual no hubiese sido posible la realización y consumación del presente trabajo. Estaré agradecido infinitamente. Dios me los guarde y proteja.
A mis profesores:
Dr. Samuel Alcántara Montes Dr. Alexandre Michtchenko Dr. Luis Héctor Hernández Gómez Dr. Raúl Peña Rivero
Dr. Juan Alfonso Beltrán Fernández
A todos los compañeros de estudio del área de Biomecánica, que mostraron su comprensión y amistad sincera.
Resumen
El avance tecnológico del mundo moderno es un hecho dinámico e imparable. El ser humano consciente de su entorno general y mediante la competencia, busca la supervivencia y la superación, con el fin de trascender y vivir cómodamente. Este espíritu de competencia ha logrado hacer de la humanidad un estilo de vida. Transformar la naturaleza y el entorno conlleva dominar todos los aspectos de la tecnología que le permita entender y mejorar los procesos de la elaboración de productos industriales, bienes y servicios. En la elaboración de productos industriales la calidad y duración de ellos deben satisfacer los criterios de control de calidad más exigentes. Es por eso que la medición de la calidad, se monitorea y evalúa a través de instrumentos, sensores o aparatos que permiten saber el que un producto o diseño, el cuánto soportará o durará, el cómo durará, todo ello por o en las mejores o peores condiciones de trabajo de diseño en general. El elaborar y medir la calidad permitirá al hombre competir y luchar por mejorar las cosas que le rodean y avanzar hacia la competitividad, la supervivencia para poder enfrentar sólidamente y cómodamente los retos del presente y futuro de la raza humana.
En la Ingeniería Mecánica es primordial monitorear los diseños mecánicos, para saber si un producto o diseño soporta las condiciones de trabajo, qué tiempo y cuánto será su vida útil. Además de pronosticar si fallará bajo tal o cuales condiciones y que condiciones serán las propicias o nocivas para que una falla de un diseño mecánico ocurra. El espíritu de coraje en el duro campo de la Ingeniería Mecánica, hace que el diseñador mecánico se fortalezca con tal de ofrecer calidad en sus productos, por lo que monitorear los diseños es vital.
El presente trabajo hace un estudio científico serio, acerca del sensor o medio actual y técnico
que se usa para monitorear los diseños mecánicos modernos en general: Las galgas
Abstract
The technological advances of the modern world is a dynamic event and unstoppable. Humans generally aware of their environment and through competition, seeks survival and overcoming, in order to transcend and live comfortably. This competitive spirit has managed to make humanity a lifestyle. Transforming nature and the environment involves mastering all aspects of technology that allows you to understand and improve the processes of the production of industrial goods and services. In the development of industrial products quality and duration of them must satisfy the criteria stringent quality control. That's why measuring quality is monitored and evaluated through instruments, sensors or devices that let you know that a product or design, or last will bear much, how, last, all for or best or worst working conditions in general design. The design and quality measure will enable man to compete and fight to improve things around and move towards competitiveness, survival to firmly and comfortably face the challenges of the present and future of the human race.
In Mechanical Engineering is essential to monitor the mechanical designs, to know if a product or design supports working conditions, how long and how much will be your life. In addition to forecasting whether or which fail under such conditions and that conditions will be favorable or harmful for a mechanical design flaw occurs. The spirit of courage in the tough field of Mechanical Engineering, mechanical designer makes is strengthened in order to offer quality products, so it is vital to monitor designs.
Índice General
Resumen VI
Abstract (English) VII
Índice General VIII
Índice de Figuras XIII
Índice de Tablas XVII
Simbología XVIII
Objetivo General XX
Justificación XX
Introducción XXI
I.- Estado del Arte 22
I.1.- Introducción 22
I.2.- Desarrollo histórico 23
I.2.1.- El puente de Wheatstone 23
I.2.2.- Galgas extensométricas a base de materiales semiconductores 30
I.2.3.- Galgas inductivas y capacitivas 31
I.2.4.-Galgas extensométricas para la medición del factor de intensidad de esfuerzos 31
I.2.5.- Galga extensométrica de geometría Cox 31
I.2.6.- El instrumento de la galga extensométrica y su método 35
I.2.7.- Método del montaje de la galga extensométrica de resistencia eléctrica 37 I.2.8.- Aparatos para el manejo de galgas de tipo laminar 39
I.2.9.- Galga extensométrica de Wolfang Sieder 40
I.2.10.-Método de instalación de galgas extensométricas en miniatura en ambiente de altas temperaturas 42
I.2.11.- Método de acoplamiento y/o montaje de galgas extensométricas para varios metales 44
I.3.- Planteamiento del problema 47
I.4.- Sumario 47
II.- Las Galgas Extensométricas 51
II.1.- Definición de una galga extensométrica 51
II.2.- Construcción de galgas extensométricas 52
II.3.- Marco teórico sobre las galgas extensométricas 53
II.4.- Sensibilidad y factor de las galgas extensométricas 56
II.4.1.- Sensores de deformación y de fuerza 58
II.5.- Galgas extensométricas. Generalidades de sensibilidad 58
II.6.- Forma de lograr mayor sensibilidad en galgas extensométricas 60
II.7.- Configuraciones para galgas extensométricas 63
II.7.1.- Montaje en cuarto de puente 64
II.7.2.- Montaje en medio puente 64
II.7.3.- Montaje en puente completo 64
II.7.4.- Problemas más comunes en el uso de galgas extensométricas 64
II.8.- Montajes de medida con galgas extensométricas 65
II.8.1.- Un cuarto de puente 66
II.8.2.- Medio puente 67
II.8.3.- Puente completo 67
II.9.- Transductores para medición de variables físicas 68
II.10.- Galgas extensométricas de configuración a base de elemento de diafragma 69
II.11.- Análisis del puente de Wheatstone equilibrado 70
II.11.1.- Puente de Wheatstone: Tensión de salida 73
II.12.- Sumario 75
II.13.- Referencias 76
III.- Antecedentes y Principios del rayo Láser 78
III.1.- Antecedentes históricos del rayo láser 78
III.2.- Marco teórico de los rayos láser 81
III.3.- Características y clasificaciones de los rayos láser 87
III.3.1.- Emisión estimulada 87
III.3.2.- Clasificación de los rayos láseres 88
III.4.1.- Control de la exposición al láser 89
III.5.- Aplicaciones de los rayos láseres 90
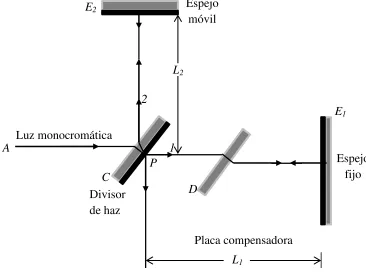
III.6.- Interferómetro de Michelson 93
III.7.- Sumario 95
III.8.- Referencias 96
IV.-Determinación y Estudio Analítico del Factor de galga 98
IV.1.- Generalidades 98
IV.2.- Parámetros de selección para galgas extensométricas 98
IV.2.1.- Sensibilidad a la tensión de la rejilla de la galga extensométrica 99
IV.2.1.1.- Constantán (Aleación A) 101
IV.2.1.2.- Isoelástic (Aleación D) 101
IV.2.1.3.- Karma (Aleación K) 101
IV.2.2.- Longitud de la galga 102
IV.2.3.- Modelo de la galga 103
IV.2.4.- Resistencia de la galga 104
IV.3.- Características de desempeño 105
IV.3.1.- Variación del factor de galga por la temperatura 105
IV.3.2.- Resistencia y tolerancia 105
IV.3.3.- Efectos de la temperatura en la resistencia 105
IV.3.4.- Capacidad de elongación 106
IV.3.5.- Vida de fatiga y rango de temperatura de operación de las galgas 106
IV.4.- Montaje de las galgas y la selección apropiada de adhesivos 107
IV.5.- Compensación de efectos térmicos 108
IV.6.- Selección de la galga para el estudio analítico, numérico y experimental y de la estructura mecánica para la experimentación en la obtención de la sensibilidad de la galga 108
IV.6.1.- Principios básicos de la operación de las galgas extensométricas 109
IV.6.2.- Conceptos fundamentales de la mecánica de materiales 109
IV.6.2.1.- Modelado mecánico de la galga 111
IV.6.3.- Modelado eléctrico de la galga y factor de galga 111
IV.6.4.- Selección de la galga 113
IV.7.- Obtención analítica del factor de la galga EA-13-060LZ-120/E 114
IV.7.1.-Cálculos previos para obtención del valor analítico del factor de galga 115
IV.7.1.1.-Estiramiento de la galga 115
IV.7.1.1.1.- Cálculo de las deformaciones unitarias transversales de la galga 116
IV.7.1.2.- Estiramiento de la galga. Análisis eléctrico 117
IV.7.1.3.- Estiramiento de la galga 119
IV.7.1.4.- Estiramiento de la galga. Obtención de parámetros eléctricos finales 121
IV.7.2.- Cálculo analítico de la sensibilidad o factor de galga 122
IV.8.- Sumario 123
IV.9.- Referencias 124
V.-Determinación y Estudio Numérico del Factor de galga 126
V.1.- Generalidades 126
V.2.- Análisis numérico de la galga extensométrica 126
V.2.1.- Caracterización física y dimensionamiento de la galga 126
V.2.2.- Simulación numérica de la galga extensométrica 130
V.2.3.- Condiciones del análisis numérico 132
V.2.3.1.- Datos técnicos de la galga 133
V.2.3.2.- Solución del modelo de la galga. Aplicación de cargas mecánicas datos eléctricos y restricciones al modelo 136
V.2.3.3.- Cálculo final para la obtención del factor de galga 141
V.3.-Sumario 143
V.4.- Referencias 144
VI.-Determinación y Estudio Experimental del Factor de galga 145
VI.1.- Introducción 145
VI.2.- Información técnica de la base prismática para el montaje de la galga 145
VI.3.- Consideraciones generales para el montaje de la galga 146
VI.5.- Consideraciones generales para la prueba de tensión de la
probeta prismática 151
VI.6.- Uso del interferómetro de Michelson para la medición de la elongación de las probetas 153
VI.7.- Valores obtenidos en la prueba de tensión 157
VI.8.- Obtención del factor de galga de cada espécimen en el banco de pruebas 158 VI.8.1.- Método y cálculo del factor de galga por medio de instrumentación óptica 158
VI.8.2.- Cálculo del factor de galga experimental de la galga EA-13-060LZ-120/E 161
VI.9.- Conclusión del análisis experimental 162
VI.10.- Sumario 162
VI.11.- Referencias 163
CONCLUSIONES 164
C.I.- Resumen y valores obtenidos del trabajo de tesis 164
C.II.- Conclusión parcial. Estudios analítico (Capítulo IV) y numérico (Capítulo V) 164
C.III.- Conclusión final 164
Trabajos Futuros 165
Índice de Figuras Capítulo I
I.1.- Galga extensométrica I.2.- Lord Kelvin
I.3.- Dr. Ruge y su asistente I.4.- Carta al Dr. Ruge
I.5.- Galga extensométrica tipo Cox
I.6.- Instalación de la Galga de William T. Beam I.7.- Instalación de las terminales
I.8.- Instalación de las terminales
I.9.- Instrumento de la galga y su método I.10.- Método propuesto por Austin B.J. Clark I.11.- Muestra el accesorio para el manejo de galgas
I.12.- Galgas extensométricas inventadas por Wolfang Sieder I.13.- Galga propuesta por Bauer, Eichinger y Feitzelmayer I.14.- La galga aislada y su montaje
I.15.- Montaje final de la galga
I.16.- Montaje de galga extensométrica por Schott, Fox y Buckley I.17.- Montaje de galga extensométrica por Schott, Fox y Buckley
I.18.- Montaje de galgas para diferentes materiales propuestos por Schott, Fox y Buckley
Capítulo II
II.1.- Galga extensométrica II.2.- Galga extensométrica II.3.- Barra en tensión
II.4.- Configuración general de una galga extensométrica
II.5.- Puente de continua para galgas con compensación de temperatura II.6.- Galga extensométrica con sensor en forma de U
II.10.- Puente de Wheatstone
II.11.- Galgas extensométricas a) Tracción y b) Diafragma II.12.- El puente de Wheatstone
II.13.- Circuito equivalente Thévenin Capítulo III
III.1.- Estado de población característico III.2.- Inversión de población
III.3.- Efecto láser
III.4.- Diagrama general de un láser III.5.- Láser de rubí
III.6.- Inversión de población; Emisión estimulada III.7.- Utilización del láser en el quirófano
III.8.- Instrumentación sismográfica III.9.- Un sistema de seguimiento con láser
III.10.- Esquema de un interferómetro de Michelson Capítulo IV
IV.1.- Galga extensométrica
IV.2.- Curva de temperatura contra salida térmica en µε IV.3.- Longitud de la galga
IV.4.- Algunos modelos típicos de galgas extensométricas
IV.5.- Ejemplos de galgas tipo roseta a) Tee, b) Rectangular 45o, c) Rectangular 60o
IV.6.- Sensor de tensión con galgas extensométricas
IV.7.- Barra prismática bajo carga axial a tensión y su respectiva elongación ΔL IV.8.- Contracción en dirección transversal
IV.9.- Tensión y compresión de la galga IV.10.- Modelado eléctrico de la galga
IV.11.- Designación estándar de galgas extensométricas de la firma Vishay R
IV.12.- Rejilla de la galga
IV.13.- Corte transversal de un hilo de la rejilla IV.14.- Terminales de la galga (Cobre)
Capítulo V
V.1.- Microfotografía de terminales de conexión
V.2.- Microfotografía que muestra los hilos en forma de zig-zag de la rejilla V.3.- Vista general de la rejilla de la galga
V.4.- Microfotografía de la unión de una etiqueta y la rejilla V.5.- Galga extensométrica EA-13-060LZ-120/E
V.6.- La galga extensométrica en un proceso de ataque químico mediante Xilol V.7.- Microfotografía donde se determina el grosor de la galga
V.8.- Formación geométrica de la galga por medio de líneas V.9.- La galga extensométrica desarrollo del área correspondiente V.10.- Vista ampliada de dos hilos de la rejilla
V.11.- Restricciones originales impuestas a la galga V.12.- Ajustes al mallado de la galga
V.13.- La galga donde se muestra su mallado finalizado
V.14.- Resumen del tipo de elemento aplicado SOLID227 multidisciplinario V.15.- Aplicación de cargas mecánicas, eléctricas y restricciones en la galga V.16.- La elongación aplicada a la galga
V.17.- Resolviendo numéricamente el modelo de la galga
V.18.- Voltaje de un voltio y elongación mecánica se aplica simultáneamente V.19.- La corriente eléctrica numérica en la galga elongada (Iprueba = 1.2424 A) V.20.- Aplicación de voltaje de prueba y restricciones eléctricas necesarias Capítulo VI
VI.1.- Barra prismática donde se montará la galga bajo estudio VI.2.- Liberando la superficie de óxidos y rugosidades
VI.3.- Limpieza mediante solvente y neutralizador VI.4.- Pegado final de la galga extensométrica
VI.5.- Se muestra la galga bajo estudio completamente instalada
VI.6.- Dos galgas activas listas para ser elongadas en el banco de pruebas
VI.7.- Dos galgas activas listas para ser elongadas por probeta en el banco de pruebas VI.8.- Banco de pruebas
VI.10.- Especificaciones del rayo láser
VI.11.- Probeta calidad espejo para la incidencia del haz láser
VI.12.- Verificación de la calidad espejo en la superficie de la probeta VI.13.- Montaje y ajuste del interferómetro de Michelson
VI.14.- Patrón o trazos de interferencia
VI.15.- Revisión final para la prueba mecánica
VI.16.- Ajuste y montaje del medidor de microdeformaciones
Índice de Tablas Capítulo I
Capítulo II
II.1.- Características de las galgas extensométricas Capítulo III
III.1.- Clasificación de los láseres Capítulo IV
IV.1.- Valores de factores de galgas y sensibilidad transversal IV.2.- Sensibilidad a la tensión de varias aleaciones
IV.3.- Rango típico de temperatura para varias combinaciones de rejilla/base IV.4.- Datos geométricos, mecánicos y eléctricos de la galga bajo estudio
IV.5.- Datos geométricos, mecánicos y eléctricos finales de la galga bajo estudio Capítulo V
V.1.- Propiedades mecánicas elásticas de la galga V.2.- Propiedades eléctricas y térmicas de la galga
V.3.- Datos geométricos, mecánicos y eléctricos finales de la galga bajo estudio V.4.- Comparación entre el factor de galga analítico y numérico
Capítulo VI
VI.1.- Datos de la probeta prismática en donde se instalará la galga VI.2.- Detalle de los cálculos y datos finales sobre la barra prismática
VI.3.- Valores obtenidos en las galgas bajo estudio en las pruebas de tensión VI.4.- Variaciones unitarias de la resistencia eléctrica de cada galga
VI.5.- Factor de galga de todos los especímenes
VI.6.- Comparación entre el factor de galga, obtención analítico, numérico y experimental
Conclusiones
Simbología Capítulo I Capítulo II A Área
C Constante de Bridgman D Diámetro
ΔR Cambio de resistencia eléctrica ΔR1 Variación resistiva en R1
ΔRn Variación resistiva en la enésima R
ΔL Variación longitudinal
dD/D Variación del volumen
dR/R Variación de la resistencia eléctrica dl/l Deformación unitaria
dt/t Variación del espesor dv/v Variación del volumen
δr/δ Cambio de la resistencia eléctrica
δRn Variación de la resistencia de la enésima R
δρ/ρ Variación de la resistividad δl/l Variación de la longitud δA/A Variación del área e Voltaje de salida
E Voltaje de alimentación E Módulo de Young FG Factor de galga F Fuerza
ε Deformación unitaria
εt Deformación unitaria en dirección transversal K Factor de galga
L, l Longitud
µε Microdeformación
ν Coeficiente de Poisson π Pi = 3.1415926
ρ Resistividad del material
R Resistencia eléctrica de un conductor Rg Resistencia inicial de la galga Ro Resistencia eléctrica inicial Ro Resistencia en reposo
Rn, Ri Resistencia eléctrica enésima
σ Esfuerzo
t Dimensión transversal V Volumen
V Tensión o voltaje de salida de desequilibrio Vo Voltaje
Capítulo III
ΔE Número de unidades de energía por encima del estado basal
e Número base natural matemático equivalente a 2.7172 F Fracción de la especie total
K Constante de Boltzman R Constante de los gases ideales T Temperatura absoluta
Capítulo IV
P Tensión, fuerza o carga mecánica Lo Longitud inicial
R Resistencia eléctrica Capítulo V
Capítulo VI
Objetivo General
Generar un estudio completo, con respecto a la operación de una galga extensométrica definida, bajo condiciones controladas de temperatura; para medir y determinar la magnitud en su parámetro de fabricación más importante: la cual es la sensibilidad o factor de galga (FG). Y cuantificar la desviación en su funcionamiento y desempeño con respecto al valor nominal (FG) que cierto fabricante señala, expresando ésta desviación por medio de un número porcentual (%).
Objetivos Particulares
Para lograr alcanzar el objetivo general que anteriormente se propone, es necesario cubrir con los objetivos particulares que a continuación se presentan:
• Estudiar e investigar el origen, principios de operación, fabricación, características y
aplicaciones y alcances de las galgas extensométricas en la Ingeniería Mecánica.
• Determinar mediante un estudio analítico (matemático) del grado de sensibilidad o factor
de galga (FG) de la misma galga extensométrica por definir.
• Determinar mediante un programa de cómputo (estudio numérico) del grado de
sensibilidad o factor de galga (FG) de la misma galga extensométrica.
• Determinar mediante un estudio en laboratorio (experimental) del grado de sensibilidad o
factor de galga (FG) de la misma galga extensométrica.
Justificación
permiten acercarnos a una perspectiva o inspección real, cuando los elementos están bajo condiciones no previstas como esfuerzos mecánicos de diferente índole, deformaciones por fatiga, esfuerzos térmicos etc. Por esa razón, las galgas revisten gran importancia el uso de ellas para visualizar los comportamientos en los nuevos diseños experimentales de cualquier índole. Como el diseño por ejemplo de un nuevo sistema de fuselaje en un avión donde se montarían sensores extensométricos para verificar su comportamiento dinámico y estático en condiciones reales de operación. Las galgas por ser así de gran importancia, es menester que las mediciones o información que ofrecen sean de gran precisión y exactitud. Por ello se busca implementar y analizar matemáticamente (estudio analítico), numérico (un programa computacional) y por último hacer pruebas en laboratorio (experimental) a un banco de galgas específicas y estudiarlas bajo condiciones controladas de temperatura; para estudiar su comportamiento y medir de alguna manera cuantitativamente, las desviaciones o errores en su funcionamiento en su parámetro de funcionamiento más importante que es la sensibilidad o factor de galga (FG).
Introducción
I.- Estado del Arte I.1.- Introducción
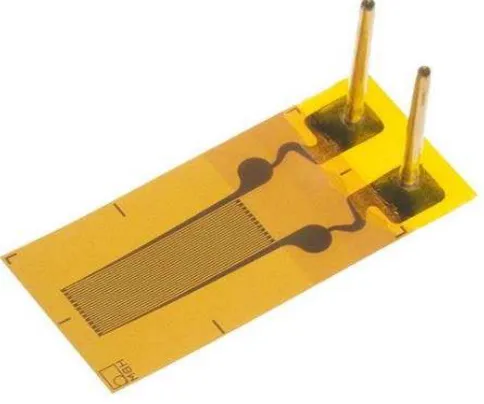
De manera literal se conoce que una galga extensométrica es un sensor, el cual tiene como función principal medir deformación, presión, carga, torque, posición, etc. (Figura I.1) [I.1]. La galga extensométrica tiene su funcionamiento basado en el efecto piezorresistivo, el cual es la propiedad que tienen ciertos materiales de cambiar el valor nominal de su resistencia eléctrica cuando se le someten a ciertos esfuerzos y se deforman en dirección de los ejes mecánicos [I.2]. Un agente externo que deforma a la galga producirá una variación en su resistencia eléctrica, esta variación puede ser por el cambio de longitud, el cambio originado en la sección o el cambio generado en la resistividad [I.3].
La galga extensométrica en su forma más común, consiste en un estampado de una lámina metálica fijada a una base flexible y aislante [I.4]. La galga se adhiere al objeto mediante un adhesivo (cianoacrilato) cuya deformación se quiere estudiar. Según se deforma el objeto, también lo hace la lámina (galga extensométrica), provocando así una variación en su resistencia eléctrica. Habitualmente la galga extensométrica consiste de un alambre muy fino, o más comúnmente un papel metálico arreglado en forma de rejilla, que se puede unir por medio de soldadura a un dispositivo que pueda leer la resistencia generada por la galga. Esta forma de rejilla permite aprovechar la máxima cantidad de material de la galga sujeto al agente externo a lo largo de su eje principal [I.4]. Asimismo, las galgas extensométricas también pueden combinarse con muelles o piezas deformables para detectar de forma indirecta los esfuerzos.
En este mismo sentido e idealmente, las galgas deberían ser puntuales para así poder medir esfuerzos en puntos concretos. En la práctica las dimensiones de la galga son apreciables por lo tanto se supone que el punto de medida es el centro geométrico de la galga. Si se pretenden medir vibraciones en necesario que la longitud de las ondas de esas vibraciones sea mayor que la longitud de la galga [I.5].
obtenido depende de estos aspectos). Existen también características que dependen de la fabricación de la galga, por ejemplo, la temperatura de funcionamiento y el factor de la galga (este indica la sensibilidad que tiene el sensor). También la resistencia de la galga, el coeficiente de temperatura, la prueba de fatiga y el coeficiente de expansión lineal (son características necesarias para conocer bajo qué circunstancias la galga arroja los resultados adecuados) [I.6].
Figura I.1.- Galga extensométrica
I.2.- Desarrollo histórico
Los orígenes de las galgas extensométricas van hasta los estudios desarrollados por Robert Hooke (1635-1703). Él fue el que postuló, que dentro de ciertos límites el esfuerzo es proporcional a la deformación unitaria [I.7]. Posteriormente, Robert Young establece una relación cuantitativa entre el esfuerzo y la deformación unitaria en una barra bajo el efecto de una carga a tensión (o compresión) [I.8].
I.2.1.- El Puente de Wheatstone
por Roy Carlson. Carlson experimento el cambio de la resistencia en cables no constringidos, lo cual constituía en un arreglo de cables unidos a unos pins que detectaban la variación en el movimiento de un sistema (se puede considerar que este fue el primer extensómetro eléctrico y es el principio de los transductores) [I.11]. Así como, es importante reconocer que la primera aplicación de una resistencia eléctrica en forma de galga pegada fue a principios de 1930 y se debe a Charles Kearns y consistían de una resistencia de Carbón aplicada en una tira aislada para medir vibraciones [I.11].
Los primeros estudios realizados sobre galgas se registran en el año de 1856, cuando William Thomson Kelvin (Figura I.2) hizo el primer aporte sobre la relación existente entre la deformación
y la resistencia de hilos conductores y semiconductores. Kelvin notó como cambiaba su
resistencia eléctrica cuando la resistencia sufría de la deformación [I.12]. Kelvin cargó mecánicamente alambres de Cobre y Hierro, produciendo en los mismos una tensión mecánica y
registrando un incremento de la resistencia eléctrica con la deformación unitaria por tracción del
alambre. Observó que el alambre de Hierro tiene un incremento de la resistencia mayor que el alambre de Cobre, cuando son sometidos a la misma deformación unitaria. De los experimentos realizados por Lord Kelvin en 1856 resulta que cuando se somete un metal a una fuerza mecánica, se produce un cambio en su resistencia eléctrica. Así, sometiendo al metal a una fuerza que lo estire se produce un aumento de su resistencia eléctrica, y si le aplicamos una compresión, su resistencia eléctrica disminuye. Este efecto, llamado efecto piezorresistivo con el tiempo abrió un
nuevo campo de las mediciones [I.13].
oponían a la obra de Rumford, Robert Mayer y Joule (la teoría dinámica del calor, juntamente con el principio de la conservación de la energía, fue aceptada por todo el mundo). Lord Kelvin realizó más que cualquier otro electricista hasta su tiempo en la introducción de métodos exactos y un aparato para medir la electricidad. Para 1845, él indicó que los resultados experimentales de Guillermo Snow Harris eran conforme a las leyes de Coulumb. En las Memoirs of the Roman Academy of Sciences de 1857 publicó una descripción de su nuevo electrómetro anillo dividido, basado en el viejo electroscopio de Johann Gottlieb Friedrich von Bohnenberger e introdujo una serie de instrumentos de medición eficaces, incluyendo el electrómetro de cuadrante (cubre el campo entero de medida electrostática). Él inventó el equilibrio corriente, también conocido como el equilibrio de Kelvin o el equilibrio de Amperio (para la especificación exacta del amperio, la unidad estándar de corriente eléctrica) [I.16].
[image:25.612.246.401.287.486.2]
Figura I.2.- Lord Kelvin
La sensibilidad de las mediciones por elementos sensores basados en resistencia tuvo su primer desarrollo y utilizados algunos años previamente por Roy Carlson, mediante una galga extensométrica de alambre no agrupados o unidos. Esto consistió en un arreglo de alambres montados alrededor de una serie de pines actuados por lazos, algún movimiento presente que provoque apretamiento del alambre y cambie su resistencia. Esto fue esencialmente un extensómetro eléctrico y el principio es aún usado hoy en algunos especiales tipos de transductores [I.17].
hélices de alto desempeño para la industria de la aviación. La galga de carbón, estuvo, sin embargo limitada para medición de las deformaciones dinámicas y pudo medir con un moderado grado de exactitud, teniendo inestabilidad en el tiempo debido a cambios de temperatura [I.18]. Otra fuente de información señala que al principio de la década de 1930, Charles Kearns hizo el primer notable uso de una galga extensométrica con una resistencia adherida, para medir deformaciones vibratorias en hélices de cuchillas de alto rendimiento, sin embargo estas galgas no eran muy precisas, teniendo problemas en la estabilidad de la resistencia, la cual era afectada por factores como la temperatura, generando errores en las medidas de las deformaciones. Él uso resistores compuestos de Carbón (del mismo material con que se construyen los instrumentos estándares de electrónica) montados en una tira aislante. Éstos estuvieron pegados en las hélices y estuvieron habilitadas para indicar las deformaciones dinámicas experimentadas por las hélices. Sin embargo, estas galgas no fueron muy exactas y debido a problemas en la estabilidad de la resistencia con respecto al tiempo provocado por cambios en la temperatura, las galgas fueron incapaces para medir deformaciones pequeñas o deformaciones estáticas [I.13].
En 1938 Arthur C. Ruge y Edward E. Simmons trabajando independientemente (Dr. Ruge era un
profesor y Simmons un estudiante graduado[I.19]) descubrieron que los conductores eléctricos de
diámetro pequeño hechos de aleaciones podían ser adheridos a superficies para medir deformaciones, creando en este momento las galgas laminares. Éste tipo de galgas tuvieron la ventaja de responder bien a deformaciones estáticas [I.13]. La galga extensométrica hace una lectura directa de deformaciones longitudinales en cierto punto del material que se está
analizando. La unidad que lo representa es épsilon (ε), esta unidad es adimensional y expresa el
cambio de la longitud sobre la longitud inicial [I.20]. Este tipo de elemento ha tenido grandes avances y constituye lo que hoy se conoce como galgas extensométricas [I.13].
Figura I.3.- Dr. Ruge y su asistente
importancia.” “…Esto le da la libertad de tratar la invención completamente como un asunto personal [I.17]”.
Figura I.4.- Carta al Dr. Ruge
fue concebida. Hoy, la galga extensométrica es uno de los transductores que se emplean con mayor frecuencia…. [I.21].”
Las galgas iniciales fueron fabricadas de alambres pegados a un material de soporte inicialmente
el mismo papel utilizado en la manufactura de cigarros [I.19]. Durante la segunda guerra
mundial, las mediciones mediante galgas extensométricas estuvieron ampliamente usadas para realizar pruebas estructurales en la industria de la aviación. En una carta en noviembre de 1943 dirigida al profesor Arthur G. Ruge de parte de la entonces norteamericana NACA del Director
de investigación aeronáutica concluyó: “No debe haber duda de que cada de estas aparentes e
insignificantes tiras de alambre y desechos de papel ha contribuido mucho al avance de miles de nuestros aeroplanos militares [I.19]”.
Ellas continuaron siendo usadas en la industria de la aviación por un número de años tal que se vieron dirigidas hacia un significante desarrollo de un nuevo diseño de galga extensométrica hacia el tipo de galga de tira de lámina en 1952. Y que fueron desarrolladas en Inglaterra durante la segunda guerra mundial [I.19]. La compañía Saunders-Roe del Reino Unido estuvo buscando mejoras en las galgas, las cuales estuvieron presentando problemas en condiciones exigentes de pruebas en helicópteros. En aquel tiempo las técnicas de circuitos impresos aparecieron y Peter Scott-Jackson de Saunders-Roe desarrolló la idea de fabricar una galga extensométrica mediante el grabado en la superficie de láminas, para generar el arreglo o red de una delgada tira metálica de apropiado material resistivo. La manufactura de galgas laminadas fue iniciada en cooperación con la Technografh Printed Circuits Ltd., y se descubrió tener un número de distintas ventajas y fueron rápidamente adoptadas particularmente por manufacturadores y usuarios en los Estados Unidos. Y abrió el camino para muchos más extensivos usos industriales de la técnica de las galgas extensométricas y por hoy la galga laminar es por mucho el más ampliamente tipo usado [I.18].
importante avance de elaborarse galgas extensométricas manufacturadas novedosamente en forma de hojas de metal [I.13].
Caltech demandó la patente de la galga, pero Simmons llevó su caso al Tribunal Supremo de California y ganó los derechos de la patente en 1949. El Dr. Ruge y Simmons teniendo la patente, la vendieron a una factoría ferrocarrilera que se convirtió en la compañía Baldwin-Lima Hamilton que produjo galgas extensométricas comercialmente [I.19]. En 1952 la compañía de Reino
Unido Saunders-Roe buscó mejorar el rendimiento de las galgas sometiéndolas a diferentes
ambientes y probando diferentes tipos de materiales para su fabricación. Patentaron las delgadas galgas que se utilizan actualmente en la medición de deformaciones en diferentes áreas industriales y científicas. De ésta manera se pudo mejorar el modelo físico de la galga,
reduciendo notablemente el tamaño y los costos[I.13].
I.2.2.- Galgas extensométricas a base de materiales semiconductores
En los años cincuenta científicos de los laboratorios Bell Telephone (Ahora llamado AT & T, Princeton, NY USA) investigaron las propiedades sensitivas al esfuerzo de materiales semiconductores [I.22]. Por lo que el otro tipo de galgas extensométricas introducidas en 1957
fueron las semiconductoras [I.23]. Las galgas extensométricas semiconductoras y transductores
mismo tiempo estuvo libremente predicho que las galgas metálicas se convertirían en obsoletas rápidamente. Es ahora claro que ambos tipos tienen un lugar en la medición de las deformaciones, con galgas semiconductoras encontrando su primario uso en el campo de los transductores. Esto viene debido a serias limitaciones en su general uso o propósito, incluyendo fragilidad, falto de ductibilidad, costo y sensibilidad de temperatura entre otros. Es también importante notar que la tecnología del semiconductor es producida hasta en los más pequeños módulos de amplificación, los cuales son capaces de brindar el nivel de salida de galgas metálicas y muy por encima, dando niveles de salida de semiconductores a bajo costo. Debido a las grandes diferencias prácticas entre galgas metálicas y semiconductoras, este último tipo merece ser tratado en un punto aparte [I.22].
I.2.3.- Galgas inductivas y capacitivas
Las galgas extensométricas inductivas son utilizadas en aplicaciones tales como: la medición de desplazamientos de una estructura (deflexiones de puentes). Las galgas capacitivas son utilizadas en tipos de aplicaciones especiales donde gran exactitud es requerida. Sus altos costos limitan su aplicabilidad [I.23].
I.2.4.- Galgas extensométricas para la medición del factor de intensidad de esfuerzos
Para 1957, Irwin [I.25] sugirió la aplicación de galgas extensométricas para determinar el factor de intensidad de esfuerzos cerca de la punta de la grieta. Sin embargo, poco avance se pudo realizar ya que el tamaño finito de la galga es un problema (efectos de los gradientes de esfuerzos y las deformaciones obtenidas cada vez que la grieta se acerca a la galga). Así, Dally y Sanford en 1981 demostraron que las galgas pueden ser utilizadas para determinar el valor del factor de intensidad de esfuerzos en modo I en un cuerpo plano [I.26].
I.2.5.- Galga extensométrica de geometría Cox
que los técnicos que utilizaban las galgas extensométricas, midiendo las propiedades mecánicas de los vidrios y cerámicas, encontraron una variación muy chica de la resistencia con la temperatura, debido precisamente al efecto citado inicialmente [I.13]. El siguiente diagrama muestra la galga extensométrica de resistencia eléctrica tipo laminar propuesto por William T. Beam (Figura I.5), pero con la novedad de tener una geometría tipo “Cox”, además otros puntos novedosos citados anteriormente [I.27].
Figura I.5.- Galga extensométrica tipo Cox
A continuación se indican esquemáticamente los pasos a seguir para su instalación correspondiente (Figura I.6).
Figura I.6.- Instalación de la Galga de William T. Beam
Figura I.7.- Instalación de las terminales
Figura I.8.- Instalación de las terminales
I.2.6.- El instrumento de la galga extensométrica y su método
En marzo de 1960 Beckman, con número de patente 2, 927,878; la invención describe a un
elemento adaptado y adherido a un cuerpo donde la deformación es para ser medida y el método de montar el aparato al cuerpo bajo estudio [I.29].
Con el incremento de la necesidad de galgas extensométricas, de reducir grandemente su tamaño para medir deformaciones producidas en pequeñas áreas localizadas y con los requerimientos para aplicaciones en altas temperaturas, lo previo en el arte de los aparatos han probado ser inadecuados.
El tamaño pequeño de la galga ha requerido muchas convoluciones de finos espaciados filamentos. Tanto que las prefabricadas galgas se han encontrado ser defectuosas debido a su daño antes de su aplicación o daño que ocurre durante la aplicación del sensor al cuerpo u objeto que va a ser evaluado. Por consecuencia un primer objetivo de la invención es proveer un nuevo y mejorado sensor de galga extensométrica de tamaño pequeño el cual minimice su daño ya sea antes o después de su aplicación al resto del cuerpo.
Otro objetivo de la invención es proveer un nuevo y mejorado sensor de galga extensométrica y método el cual pueda ser leído y eficientemente aplicado con un alto grado de precisión hacia un particular punto de un cuerpo. Otros puntos de la mejoras son: el cual tenga extremadamente pequeñas dimensiones mientras mantengamos su operacionalidad y que sea práctico, otro punto es que trabaje en aplicaciones particularmente adaptado para aplicaciones de altas temperaturas, otro es que el sensor de la galga sea conformable hacia la superficie del cuerpo en el cual va a ser aplicado, otro que este sensor de la galga sea no caro en su manufactura y bajo en costo, otro punto sería que el sensor de la galga sea que pueda ser colocado cerca, en contacto directo con la superficie del cuerpo que va a ser medido etc. En la siguiente página se detalla el correspondiente instrumento de la galga y su método (Figura I.9).
Figura I.9.- Instrumento de la galga y su método
I.2.7.- Método del montaje de la galga extensométrica de resistencia eléctrica
Patentes de Los Estados Unidos; La presente invención describe el montaje de las galgas extensométricas en las superficies de prueba y más particularmente el montaje de los soportes o empaques de las galgas metálicas en superficies de prueba como metales u otros materiales [I.31].
Cuando una galga laminar soportada o empaquetada en un soporte de plástico para ser usada para determinar algunas de las propiedades de un metal bajo prueba es esencial que la galga laminar sea montada firmemente en la superficie del metal para que se haga una buena prueba. La práctica en el montaje de la galga laminar empaquetada en plástico es a través de la presión ejercida sobre cemento plástico y un endurecimiento que ha sido aceptable para pruebas estáticas pero ha fallado para proveer la firme adhesión necesariamente en pruebas dinámicas en materiales otros como plásticos hacia los cuales el cemento plástico se adheriría.
La presente invención evita las desventajas de métodos previos en el montaje de galgas laminares y provee adicionales ventajas, algunas de las cuales son indicadas en las siguientes especificaciones: La presente invención provee un método en el montaje de la galga laminar, que permitirá una firme adhesión en la prueba del material, otra mejora es obtener buenos resultados en pruebas estáticas y dinámicas cuando se monten en superficies metálicas de galgas laminares metálicas lo cual será firmemente adheridas para la prueba de la superficie.
Los pasos de la instalación de la galga laminar son los siguientes de acuerdo al diagrama de la página siguiente (Figura I.10). En ella se muestra el desembalaje y montaje de la galga extensométrica propuesta por Austin B.J. Clark.
Figura I.10.- Método propuesto por Austin B.J. Clark
I.2.8.- Aparatos para el manejo de galgas de tipo laminar
laminares. Señalándose en la respectiva patente lo siguiente: Es el objetivo de la presente invención proveer un mejoramiento mediante un aparato y método de empaquetamiento de galgas y almacenamiento en existencia así como su instalación de las galgas en un miembro bajo prueba. Otro objetivo, es obtener nuevos medios para el mejor manejo de galgas laminares lo cual es relativamente simple en construcción y operación, es económico en su manufactura. El siguiente diagrama muestra (Figura I.11) la manera de utilizar el accesorio para el manejo de las galgas [I.33].
Figura I.11.- Muestra el accesorio para el manejo de galgas
I.2.9.- Galga extensométrica de Wolfang Sieder
evaluada, la cual estaba diseñada cuando menos de una tira de medición. Una galga extensométrica adaptada para ser adheriblemente montada en una parte estructural en un lugar para ser evaluado la cual esta proveía cuando menos una rejilla de medición con terminales en las cuales son soldadas como líneas de medición de la rejilla, una extensión del soporte de la rejilla laminar es suministrada a lo largo del filo de la galga extensométrica y es conectada con el soporte principal por una perforación. Este tipo de galga además de ser laminada como las anteriores aplicaciones de galgas, tenía además un accesorio que permitía el manipuleo de la
galga. Éste accesorio era parte del mismo soporte de la galga que se extendía más allá de la tira
de la lámina y con un orificio para ser montada. Para Sieder se le ocurre la idea de implementar o construir galgas simultáneas denominadas hoy rosetas. Los diagramas a continuación mostrados (Figura I.12) señalan los diseños correspondientes [I.34].
Figura I.12.- Galgas extensométricas inventadas por Wolfang Sieder
La resistencia eléctrica de las tiras metálicas es cambiada por su propia elongación y por un cambio en su estructura cristalina. Este cambio de resistencia es una indicación por la extensión de su elongación y es por la deformación la cual es indicada eléctricamente por medios de amplificación. Ocasionalmente como resultado de especiales circunstancias la fuerza de adhesión del pegamento o material adhesivo podría no ser suficiente. Esta inadecuación podría tener diferentes causas tales como por ejemplo una superficie de la base o soporte de la galga extensométrica no apta para la aplicación del pegamento o del material adhesivo. Esta superficie podría por ejemplo ser grasosa o húmeda. También, el pegamento o el material adhesivo estará no usable o útil como resultado de humedad o caducidad. Hasta con la excesiva humedad del
aire, el pegamento o material adhesivo podría perder las propiedades de pegamento durante las
operaciones de pegado lo cual es posible por ejemplo durante el verano en caso de espacios libres de aire acondicionado y con gran humedad en el aire. También una inadecuada o incorrectamente superficie preparada de la parte estructural para ser evaluada podría ser la causa para una inadecuada adhesión. También la parte estructural podría estar grasosa o muy húmeda. Es el objetivo de la presente invención proveer una galga extensométrica la cual su condición de adherencia pueda ser probada después de la instalación y también la suficiente adherencia del pegamento o del material adhesivo sin daño de la galga en su funcionalidad. Los problemas delineados son resueltos de acuerdo a la presente invención, con el uso de una extensión del soporte o base para la rejilla laminar de la galga la cual es suministrada por un lado de la galga, la cual es conectada con el soporte principal por medio de una perforación. El soporte de la rejilla laminar metálica es por lo tanto extendida por una pequeña pieza la cual puede ser desechada desde la pieza de evaluación para ser medida después que es firmemente pegado o adherido al soporte. Si el pegado es bueno, entonces el soporte estará bien conectado con la pieza bajo evaluación por lo tanto la extensión puede ser removida de la pieza de trabajo solo desechando en pequeñas muescas [I.35].
I.2.10.- Método de instalación de galgas extensométricas en miniatura en ambiente de altas temperaturas
superficie caliente de un material auxiliar poroso que sirve como soporte al empaque laminar de la galga y que mediante el uso de las terminales de acuerdo al diagrama mostrado a continuación (Figuras I.13, I.14 y I.15) sirven para el manipuleo de la galga y su conexión a instrumentos de medición. En este sentido la galga extensométrica es adherida con su lado de rejilla en el sentido conveniente al soporte poroso por medio de un adhesivo. El empaque laminar de la galga es
entonces quitada y el adhesivo disuelto por el solvente químico. Entonces la galga es instalada en
el punto de prueba de la parte a evaluar [I.37].
Figuras I.13.- Galga propuesta por Bauer, Eichinger y Feitzelmayer
Figuras I.15 Montaje final de la galga [I.38]
I.2.11.- Método de acoplamiento y/o montaje de galgas extensométricas para varios metales En agosto de 1988 los inventores Schott, Fox y Buckley de la NASA (agencia espacial norteamericana) elaboraron un método para el montaje de galgas sobre varios tipos de materiales [I.39]. Un método es proveído para adherir galgas extensométricas en varios materiales (Figuras I.16, I.17 y I.18).
Figuras I.16.- Montaje de galga extensométrica por Schott, Fox y Buckley
Los siguientes diagramas muestran en conjunto (Figura I.18) los pasos para el montaje de galgas en diferentes materiales propuestos por Schott, Fox y Buckley [I.40].
Figuras I.18.- Montaje de galgas para diferentes materiales propuestos por Schott, Fox y Buckley
galga y solo el uso permitido de sólo 90 días para mediciones de la galga. Los epoxis usados para el pegado de las galgas hacia la base de las estructuras requieren el uso de lámparas de calor, secadoras de cabello u otros aparatos eléctricos generadores de calor para el curado de los epoxis. El uso de los epoxis en el montaje de una galga extensométrica requiere una considerable cantidad de tiempo y energía. Otro método previo utiliza una aspiradora que aplica presión con una conducción de calor. Este proceso envuelve una alta presión y muchas horas de preparación. De acuerdo a esto es el objeto de esta invención rápidamente pegar las galgas a una variedad de materiales. Y el objetivo más allá de esta invención es rápidamente pegar galgas en el campo. La presente invención describe un método el cual puede ser ejecutado mediante un aparato hecho público mediante la patente 4, 767,484 llamado “Induction Heating Gun” (arma de calentamiento por inducción).
De acuerdo con la presente invención, los previos y adicionales objetos son obtenidos por medio de suministrar varios métodos para el rápido pegado de galgas para tres variedades de materiales. Primero una cinta con un adhesivo material de soporte es colocado a lo largo del cuerpo a evaluar. La galga es entonces colocada planamente de manera suave lado abajo contra la cinta adhesiva y cubierta con una delgada y uniforme capa de adhesivo. La cinta es entonces removida desde el cuerpo a evaluar.
minuto. De acuerdo a esto, la galga extensométrica es entonces rápidamente adherida al deseado material.
I.3.- Planteamiento del problema
Se ha encontrado que durante la operación y funcionamiento de diseños mecánicos, existe una desviación entre los cálculos analíticos de los diseños y los valores arrojados durante las mediciones mediante galgas extensométricas de los parámetros de funcionamiento de los mismos. Éste posibilita que se plantee un estudio correspondiente para evaluar el comportamiento de los sensores utilizados para medir los parámetros de diseño, los cuales son las galgas extensométricas. Estas miden el comportamiento de los diseños en el campo experimental. Por ese motivo se estudiará en el presente trabajo el comportamiento y funcionamiento de las galgas extensométricas, este estudio comprende el cálculo analítico (matemático), numérico (computacional) y experimental (banco de pruebas) para evaluar su comportamiento de las galgas extensométricas. Estos estudios se limitan a evaluar el parámetro principal de las galgas extensométricas el cual es la magnitud de la Sensibilidad o el Factor de Galga (FG). Por lo que, el obtener la magnitud de la sensibilidad o factor de galga (FG) en un tipo o grupo específico de galgas extensométricas definidas mediante y por el cálculo analítico, simulación numérica y experimental, se logrará comparar estas tres magnitudes obtenidas del factor de galga (la analítica, la numérica y experimental) y el posible impacto de estas desviaciones en la construcción y el valor nominal del fabricante y la calidad de la construcción de las galgas extensométricas. Este estudio permitirá y también arrojará las desviaciones en los datos nominales del factor de galga del fabricante y los valores reales de funcionamiento en el factor de la galga o sensibilidad de las galgas extensométricas, que nos permita medir la calidad del sensor y evaluar él porque los valores analíticos de los datos de diseño de los elementos mecánicos y los valores arrojados por estos sensores sean diferentes.
I.4.- Sumario
galgas extensométricas dan información importantísima para predecir deformaciones, o en lo peor de los casos predecir fracturas en los diseños. Permiten dar una perspectiva o inspección real, cuando los elementos están bajo condiciones no previstas como esfuerzos mecánicos de diferente índole, deformaciones por fatiga, esfuerzos térmicos etc. Señalada la importancia anterior y la actual complejidad en el monitoreo de los modernos diseños mecánicos, es importante analizar con métodos analíticos (matemáticos), de simulación numérica moderna y experimental el comportamiento y funcionamiento de las galga extensométricas. Por lo que realizar este estudio de un sensor de esta naturaleza para visualizar y comprender mejor su funcionamiento intrínseco y el impacto de su funcionamiento y operación es de gran importancia. Los resultados obtenidos en los estudios analíticos, simulaciones numéricas y experimentales de las galgas extensométricas arrojarán e indicaran una correlación directa de valores muy cercanos a los modelos físicos experimentales conocidos. Por lo que el análisis numérico, analítico y experimental de la galga extensométrica dará la certeza de que los parámetros mecánicos medidos y señalados por ella en el campo experimental real, serán sí o no verídicos y confiables para el estudio del trabajo del elemento mecánico bajo estudio.
I.5.- Referencias
1.- Ghosh, A. K., Introduction to Measurements and Instrumentation, Ed. Prentice Hall, pp 117, 2007.
2.- Hannah, R. L. y Reed, R. L., Strain Gage Users´ Handbook, Ed. Kluwer, pp 1, 1992.
3.- Leckie, F. A. y Dal Bello, D. J., Strength and Stiffness of Engineering Systems, Ed. Springer, pp 229, 2009.
4.- Shull, L. C., Basic Circuits, Ed. Hannah, R. L. y Reed, S. E., Strain Gage Users' Manual, pp 122, 1992.
5.- Wilson, J. S., Sensor Technology Handbook, Ed. Newnes, pp 262-264, 2005.
6.- Sciammarella, C. A. y Sciammeralla, F. M., Experimental Mechanics of Solids, Ed. Wiley, pp 48-53, 2012.
7.- Burgan, M., Robert Hooke; Natural Philosopher and Scientific Explorer, Ed. Signature lives, 2008.
8.- Askeland, D. R., Fulay, P. P. y Wright, W. J., The Science and Engineering of Materials, Ed. Cengage learning, pp 211, 2006.
10.- Bowers, B., Sir Charles Wheatstone FRS 1802-1875, Ed. IEE, 2007.
11.- Chalmers, G. F., Materials Construction, Performance and Characteristics, Strain Gauge Technology, Ed. Window, A. L., pp 2-3, 1992.
12.- Russell, A., Lord Kelvin; His Life and Work, Ed. Biblio Bazaar, 2010. 13.- Strain Gauges ( http://www.dur.ac.uk/richard.scott/gauges.html).
14.- Kelvin, W. T., On the dynamical theory of heat (Thermal dissipation of energy of vibration of solids), Edinburg Royal Society Proceeding, Vol. V, pp 510-512, 1865.
15.- Wilson, D., William Thomson; Lord Kelvin, Ed. J. Smith, 1910. 16.- Wilson, D., William Thomson; Lord Kelvin, Ed. J. Smith, 1910. 17.- Strain Gauge Technology A. L. Window pp 2.
18.- Strain Gauge Technology A. L. Window pp 2 y 3.
19.- Sciammarella, Cesar & Francisco., Modern Experimental Mechanics of Solids: Theory, Techniques, Instrumentation página 42.
20.- Ganesan, T. P., Model Analysis of Systems, Ed. University Press, pp 146, 2000. 21.- Guía para Mediciones Electrónicas y Prácticas de Laboratorio pp 400.
22.- Strain Gage Users Handbook pp 3.
23.- Sciammarella, Cesar & Francisco., Modern Experimental Mechanics of Solids: Theory, Techniques, Instrumentation pp 43.
24.- Strain Gage Users Handbook pp 449.
25.- Irwin, G. R., Analysis of stresses and strains near the end of a crack traversing a plate, Journal of Applied Mechanics, Vol. 24, pp 361-364, 1957.
26.- Dally, J. W. y Sanford, R. J., Strain gage methods for measuring the opening mode stress
intensity factor KI, Experimental Mechanics, Vol. 27, No. 4, pp 381-388, 1987.
27.-
http://www.google.com/patents?id=YTtGAAAAEBAJ&printsec=abstract&zoom=4#v=onep age&q&f=true
28.-http://www.google.com/patents?id=YTtGAAAAEBAJ&printsec=abstract&zoom=4#v=onep age&q&f=false
30.-http://www.google.com/patents?id=M75EAAAAEBAJ&printsec=abstract&zoom=4#v=onep age&q&f=false
31.- http://www.google.com/patents/US3082139 32.-
http://www.google.com/patents?id=FTBuAAAAEBAJ&printsec=abstract&zoom=4#v=onep age&q&f=false
33.-http://www.google.com/patents?id=5UteAAAAEBAJ&pg=PA1&source=gbs_selected_page s&cad=2#v=onepage&q&f=false
34.-http://www.google.com/patents?id=Cpw1AAAAEBAJ&printsec=abstract&zoom=4#v=onep age&q&f=true
35.-http://www.google.com/patents?id=Cpw1AAAAEBAJ&printsec=abstract&zoom=4#v=onep age&q&f=false
36.- http://www.google.com/patents/US4115174
37.-http://www.google.com/patents?id=pesrAAAAEBAJ&printsec=abstract&zoom=4#v=onepa ge&q&f=false
38.- http://www.google.com/patents/US4115174 39.- http://www.google.com/patents/US4767484 40.-
II.- Las galgas extensométricas
II.1.- Definición de una galga extensométrica
Una galga extensométrica o extensímetro, es un sensor basado en el efecto piezorresistivo. En su forma más común, consiste en un estampado de una lámina metálica fijada a una base flexible y aislante (Figura II.1) [II.1].
Figura II.1.- Galga extensométrica
Dependiendo de la configuración de la galga, esta puede ser mucho más sensible a las deformaciones en la dirección horizontal que al efecto de deformaciones en el eje vertical, lo que se entiende por una galga uniaxial. Las marcas alrededor de la galga sirven para alinearla en el componente durante su instalación y asegurar paralelismo y perpendicularidad al punto de medición. Para el buen funcionamiento de la galga se adhiere al elemento a evaluar y cuya deformación se quiere estudiar, la adhesión se realiza por medio de un pegamento especial (como lo es, el cianoacrilato).
Las galgas extensométricas son medidores de deformación en material bajo esfuerzo mecánico. También son conocidos como deformímetros, extensómetros, galgas de deformación o strain gauge. Son instrumentos que sirven para medir la deformación unitaria producida por un agente externo y se basa en el hecho de que la resistencia eléctrica del conductor cambia con las modificaciones en la longitud del conductor debidas al cambio dimensional. La deformación es causada por un cambio en la longitud, el cambio en la resistencia eléctrica puede correlacionarse con la deformación en el conductor. Si la galga se une a un componente que se deforma, se puede presuponer que el cambio dimensional en el conductor es el mismo que el del material. Por lo tanto, al medir los cambios en la resistencia eléctrica de un conductor se obtienen las deformaciones unitarias en el material.
Soporte flexible y aislante
II.2.- Construcción de galgas extensométricas
Los medidores de deformación (galgas extensométricas) generalmente se fabrican grabando y cortando una hoja delgada del material (Figura II.2). El diseño de parrilla se utiliza para incrementar la sensibilidad del medidor permitiendo una mayor longitud del conductor en un área pequeña. La parrilla se enlaza a un forro fino, llamado el soporte, que se une directamente al espécimen de la prueba. Por lo tanto, el esfuerzo de tensión experimentada por el espécimen de la prueba se transfiere directamente a la galga en alargamiento, que responde con un cambio lineal en resistencia eléctrica. Las galgas en alargamiento están disponibles comercialmente con valores nominales de resistencia desde 30 hasta 3000 Ω, siendo 120, 350, y 1000 Ω, que son los valores más comunes en el mercado.
Figura II.2.- Galga extensométrica
Los materiales que suelen utilizarse para fabricar galgas son aleaciones metálicas, como por ejemplo el Constantán, Nicromo o elementos semiconductores como por ejemplo el Silicio y el Germanio [II.2]. Es por ello que podemos clasificar las galgas en dos tipos; las metálicas y las semiconductoras. Las principales aleaciones que usan las galgas metálicas son:
a) Cobre y Hierro
b) Platina y silicialista
c) Constantán
d) Nicromo o Karma
e) Isoelastic
f) Aleación de Platino
g) Aleaciones de Níquel-Cromo
Final de curva
Parrilla
Marca de alineación
Final de curva
Terminal soldable Longitud de la
parrilla activa
h) Nitróxido de Titán
Algunos de los materiales utilizados en el soporte de las galgas metálicas pueden ser:
a) Poliamida
b) Epoxy
c) Fibra de vidrio reforzada con Epoxy
II.3.- Marco teórico sobre las galgas extensométricas
Dentro de la Ingeniería Mecánica se encuentra muy bien establecido que la deformación unitaria de un material puede ser de extensión (denominada positiva) o de compresión (denominada negativa). La deformación unitaria es adimensional, se expresa en unidades tales como pulgada/pulgada o mm/mm. En la práctica, la magnitud de la deformación unitaria medida es de
magnitudes que se consideran muy pequeñas, por lo que se expresa como microdeformación (µε),
lo cual se muestra en la (Figura II.3) y Ecuación II.1 [II.3].
En otro sentido de ideas, cuando un componente mecánico es uniaxialmente tensionado por medio de la aplicación de un agente externo (fuerza), (Figura II.3), se desarrolla un fenómeno conocido como Poisson. El cual es causado por la variación del espesor de la barra D, la cual se contrae en la dirección transversal, o perpendicular a la fuerza. La magnitud de esta contracción transversal es una característica del material indicada por la relación de Poisson. La relación de Poisson se denomina por la letra griega nu (ν) y es el cociente negativo de la deformación unitaria en la dirección transversal (perpendicular) a la fuerza y la unitaria, ver Ecuación II.2
ε = ΔL/L
II.1
Figura II.3.- Barra en tensión
∆L D
F F
ν = - (εt / ε) II.2
Las galgas extensométricas reciben su nombre porque al deformarse longitudinalmente cambian
su resistencia. La deformación unitaria ε (Ecuación II.1) se define como un cambio en la longitud
de un material debido a una fuerza o esfuerzo aplicado externamente [II.4]. Donde de la (Figura
II.3) ε es deformación unitaria, ΔL es el cambio en la longitud debido a la fuerza aplicada y L es
la longitud original.
Para mantener el funcionamiento lineal de estos transductores, la fuerza aplicada no debe deformar unitariamente al material del transductor más allá del punto de cedencia del material.
Cuando se estira una galga extensométrica, su resistencia eléctrica tenderá a cambiar (ΔR) de
acuerdo con la Ecuación II.3 [II.5]
ΔR = ρ (ΔL/A) II.3
Dónde ρ es la resistividad del material, ΔL es el cambio en la longitud efectiva del conductor y A es el área del conductor.
La mayoría de las galgas extensométricas se fabrican de tal modo que la resistencia varíe linealmente con los cambios en la longitud. Los cambios tanto en la resistividad (como una función del esfuerzo) como en el área son mínimos y por lo mismo se pueden ignorar. La resistencia sin deformación es generalmente de 120 a 350 Ohms. Se seleccionaron originalmente esos valores debido a que corresponden a la resistencia crítica de amortiguamiento de los galvanómetros empleados en estas galgas. Debido a que hoy en día muy pocos instrumentos utilizan galvanómetros para medir la salida de circuitos puente, la resistencia de las galgas extensométricas ya no se necesita mantener en esos valores. Como resultado de ello, se ha aumentado para igualar con los requisitos de los amplificadores de instrumentos de circuito integrado, para reducir los requerimientos de potencia y para aumentar la relación de señal a ruido. Resulta de todo ello que la resistencia sin deformación se ha aumentado a valores tan altos
como sea posible fabricarlos. Esos valores son de aproximadamente 1 KΩ en las galgas
FG = K = (ΔR/Rg) / (ΔL/L) II.4
Siendo K el factor de galga (FG) (usualmente ≈ 2, pero puede ser de varios cientos), ΔR es el
cambio en la resistencia de la galga (Ω), Rg es la resistencia inicial de la galga (Ω), ΔL es el
cambio en la longitud de la galga y L la longitud de la galga.
En la (Figura II.4) se muestra una configuración básica de una galga extensométrica. Las zonas grandes en el extremo (baja resistencia) reducen los efectos de la deformación transversal (deformación perpendicular a la longitud de la galga).
Figura II.4.- Configuración general de una galga extensométrica
La longitud de la galga puede variar dependiendo de la longitud del área sobre la que se vaya a promediar la deformación. El concreto y otros materiales no homogéneos utilizan galgas muy largas, mientras que las raíces de los engranes se emplean galgas muy pequeñas. Una galga debe unirse o adherirse en una superficie que esté sujeta al efecto de un agente externo porque la deformación unitaria se promedia sobre la longitud de la galga. El uso de modelos de plástico y luz polarizada, permite observar patrones de deformación. Estos patrones también se pueden determinar empleando una computadora y programas de análisis por medio del Método de
Longitud nominal del soporte
Ancho nominal del soporte
Ancho galga
Longitud activa
galga
Elementos Finitos. El transductor está diseñado para un puente completo (que se definirá en una sección posterior) en el que dos galgas están sujetas a tensión y dos a compresión [II.7].
II.4.- Sensibilidad y factor de las galgas extensométricas [II.8]
Es muy importante que la galga se encuentre instalada correctamente sobre el espécimen que se desea analizar. Un parámetro fundamental de la galga extensométrica es la sensibilidad al efecto del agente externo, expresado cuantitativamente como el factor de galga (FG). Se define el factor de galga como el cociente del cambio fraccionario en resistencia eléctrica al cambio fraccionario en la longitud (deformación) de acuerdo a la Ecuación II.5 [II.9]
FG = (ΔR/R) / (ΔL/L) = (ΔR/R) / ε II.5
Dónde:
FG = Factor de galga [adimensional]
ΔR= Cambio en la resistencia de la galga [Ω]
R = Resistencia inicial de la galga [Ω]
(ΔL/L) = ε = Deformación unitaria [adimensional]
Cuando un material conductor o semiconductor es sometido a un esfuerzo, se deforma y cambian su longitud, sección y resistividad, como consecuencia, varía su resistencia eléctrica. Los transductores basados en este principio se denominan galgas extensométricas. Por su linealidad y pequeño tamaño son uno de los transductores más frecuentes en la medida de magnitudes mecánicas.

![Tabla IV.1.- Valores de factores de galgas y sensibilidad transversales [IV.4]](https://thumb-us.123doks.com/thumbv2/123dok_es/5004223.77203/100.612.69.563.503.740/tabla-iv-valores-factores-galgas-sensibilidad-transversales-iv.webp)