1
PLATAFORMA PARA EL CONTROL DISTRIBUIDO DE ILUMINACIÓN EN EDIFICIOS INTELIGENTES
JUAN ALBERTO MEJIA
TRABAJO DE GRADO PRESENTADO PARA OPTAR EL TÍTULO DE INGENIERO ELECTRÓNICO
DIRECTORES:
ING. RAFAEL FERNANDO DÍEZ MEDINA Ph.D ING. DIEGO ALEJANDRO PATIÑO GUEVARA Ph.D
PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERÍA
2
RECTOR MAGNÍFICO:
JORGE HUMBERTO PELÁEZ PIEDRAHITA, S.J
DECANO ACADÉMICO:
ING. JORGE LUIS SANCHEZ TÉLLEZ
DECANO DEL MEDIO UNIVERSITARIO: ANTONIO JOSÉ SARMIENTO NOVA S. J.
DIRECTOR DE CARRERA:
ING. JAIRO ALBERTO HURTADO LONDOÑO
3 TABLA DE CONTENIDOS
1. INTRODUCCIÓN ... 5
2. OBJETIVOS ... 6
2.1 Objetivo General ... 6
2.2 Objetivos Específicos ... 6
3. DETALLES DEL SISTEMA (PARA UNA SOLO LUMINARIA) ... 6
3.1 Especificaciones Generales ... 6
3.2 Diagrama de Bloques ... 7
3.3 Descripción del Diagrama de Bloques ... 8
3.1.1 Fuente de Alimentación ... 8
3.3.1.1 Filtro EMI ... 8
3.3.1.2 Rectificador de Onda Completa ... 8
3.3.1.3 Convertidor DC/DC (Flyback) ... 8
3.3.2 Controlador HPLED (Convertidor Buck) ... 8
3.3.3 Luminaria HPLED ... 9
3.3.3.1 Arreglo HPLED ... 9
3.3.3.2 Maqueta ... 9
3.3.4 Control del Sistema ... 10
3.3.4.1 Sensor de Luz Ambiente ... 10
3.3.4.2 Microcontrolador (PID) ... 10
3.3.4.3 Interfaz de Usuario ... 10
4. SISTEMA DE ILUMINACIÓN ... 11
4.1 Desarrollo de la Maqueta ... 11
4.2 Escogencia de la Luminaria ... 12
4.3 Control del Nivel de Intensidad de los HPLEDs ... 13
5. CONTROLADOR HPLED ... 14
5.1 Detector de Corriente Pico ... 14
5.2 Control de Tiempo de apagado ... 15
5.3 Diseño y Cálculos del controlador ... 16
6. FUENTE DE ALIMENTACIÓN DEL CONTROLADOR DESDE LA RED ELÉCTRICA COMERCIAL ... 22
6.1 Convertidor Flyback ... 23
4
6.1.2 Etapa de Rectificación ... 26
6.1.3 Convertidor DC/DC y etapa de control ... 26
6.1.3.1 Control del factor de potencia del integrado LM3450 ... 26
6.1.4 Diseño del Convertidor y Cálculos ... 28
7. SISTEMA DE CONTROL... 36
7.1 Escogencia del sensor ... 36
7.2 Medición de la velocidad del sensor ... 36
7.3 Caracterización del Sensor ... 37
7.4 Caracterización del controlador HPLED ... 37
7.5 Caracterización del sistema Controlador/Luminaria/Sensor ... 38
8. PRUEBAS Y ANALISIS DE RESULTADOS... 43
8.1 Diagrama de Bloques y Análisis de la Simulación ... 43
8.2 Resultados de implementación ... 44
9. CONCLUSIONES ... 52
10. PROYECTOS FUTUROS ... 53
11. INDICE DE FIGURAS ... 54
12. INDICE DE TABLAS ... 54
13. BIBLOGRAFIA ... 55
5 1. INTRODUCCIÓN
Este trabajo de grado es parte de un macro proyecto, llamado HACIA UNA CIUDAD INTELIGENTE: DISEÑO DE UNA MICRORED INTELIGENTE PILOTO SILICE FASE III, el cual intenta convertir las tradicionales redes de distribución eléctrica en "redes inteligentes" que permitan maximizar la calidad de la energía, predecir y gestionar el uso eficiente de la energía eléctrica. Todo esto con el fin de promover y gestionar el uso óptimo de los recursos, integrar los sistemas de generación distribuida, mejorar la confiabilidad y seguridad del sistema, mejorar la calidad de la potencia y aumentar la flexibilidad del sistema de la red de CODENSA ESP.
Gracias al aumento de la población y la disminución de los recursos naturales, se deben desarrollar sistemas que permitan un manejo adecuado de los recursos para poder satisfacer esas crecientes necesidades. Es allí donde la infraestructura eléctrica es clave, ya que la mayoría de sistemas dependen de ella. [3] Por esta razón es importante reducir costos, mejorar e independizar el sector eléctrico y tener un mayor control sobre las interrupciones en el sistema eléctrico.
Para esto es necesario crear una red que incorpore, un sistema de control inteligente capaz de monitorear y controlar dicha red, tanto durante la operación normal como durante las grandes interrupciones, garantizando así el funcionamiento apropiado de otras infraestructuras críticas y de la ciudad en sí [3].
En esta parte es donde este trabajo de grado cobra importancia debido a que la iluminación en las edificaciones, consume gran parte de la energía eléctrica en las ciudades. Debido al hecho que la gente pasa la mayor parte de su tiempo dentro de edificaciones ya sean en casas o sitios de trabajo, así que la eficiencia energética y los adecuados niveles de confort de los edificios son de bastante importancia para disminuir el consumo eléctrico.[4]
6 2. OBJETIVOS
2.1 Objetivo General
Construir un prototipo de prueba para el control de iluminación LED en un recinto cerrado aislado de la luz ambiental.
2.2 Objetivos Específicos
• Diseñar e implementar un regulador de potencia (convertidor conmutado) para alimentar las luminarias.
• Determinar el mejor sensor y acondicionador de señal de acuerdo con los parámetros de iluminación determinados para este proyecto.
• Desarrollar un sistema mediante un control básico, que permita garantizar niveles de iluminación moderada: de 70 a 220 luxes a 85 cm del suelo, aislado de la luz ambiente.
• Garantizar que el sistema sea compatible con el protocolo escogido.
3. DETALLES DEL SISTEMA (PARA UNA SOLO LUMINARIA)
3.1Especificaciones Generales
El problema que plantea el presente trabajo es realizar un prototipo de prueba para el control de iluminación LED en un recinto cerrado aislado de la luz ambiental, todo esto con el fin medir la correcta intensidad de la luz de una luminaria HPLED por medio de un sensor de luz ambiente y así poder enviar esos datos a un dispositivo central para su adecuado procesamiento, luego estos deben ser enviados a un controlador HPLED que disminuya o aumente la intensidad según corresponda. Para realizar esto se van a realizar las siguientes tareas:
• Construir una maqueta para la luminaria HPLED de modo que la disposición del arreglo HPLED y el sensor faciliten la toma de información además de la implementación del control.
• Determinar el HPLED y la cantidad a utilizar de acuerdo con el objetivo de iluminación del proyecto.
7
• Construir una fuente de alimentación en la que se utilice un convertidor conmutado por motivos de eficiencia para el controlador HPLED, de modo que esta provea aislamiento por seguridad desde la alimentación realizada por la red de suministro comercial. (120Vrms, 60 Hz, monofásica)
• Conseguir un sensor de luz ambiente que pueda medir los parámetros de iluminación exigidos para este proyecto (max 220 luxes) y que además su respuesta sea lineal, de modo que la implementación del control sea más sencilla de desarrollar.
• Implementar el control del sistema (Controlador/Sensor) por medio de un controlador PID, todo esto con la ayuda de un micro controlador fácil de programar, facilitando en un futuro la escalabilidad o mejoramiento del proyecto.
• Desarrollar una interfaz de usuario con el fin de poder variar la iluminación, con el fin de que esta se fije a un valor deseado entre 70 a 220 luxes.( Este rango se fijará para cada luminaria HPLED independiente, sin que la iluminación de las demás interfieran con el sensor de cada una)
3.2 Diagrama de Bloques
8 3.3 Descripción del Diagrama de Bloques
3.3.1 Fuente de Alimentación
El objetivo de este proyecto es que en un futuro sea implementado en un edificio inteligente. Es por esto que el enfoque de esté fue la versatilidad, la escalabilidad y la facilidad de implementación. Teniendo en mente esto, se optó por separar el control de los HPLEDs de la fuente de alimentación provista desde la red de suministro comercial. Lo que facilita en gran medida el control total del sistema, añadiendo la posibilidad de añadir más luminarias u otros sistemas de control.
3.3.1.1 Filtro EMI
Para diseñar esta fuente de alimentación, el primer paso es la construcción de un filtro EMI encargado de eliminar la interferencia electromagnética generada por la misma fuente de alimentación, causada principalmente por los dispositivos de conmutación y así evitar que lleguen a la línea afectando otros equipos alimentados por esta.[10] Del mismo modo evita que ruido de alta frecuencia insertado en la línea pueda afectar a la fuente de alimentación y en consecuencia al controlador y a los HPLEDs.
3.3.1.2 Rectificador de Onda Completa
El rectificador de onda completa se va a encargar de convertir la señal de voltaje alterno (60 Hz) en una onda con solo ciclos positivos de dos veces la frecuencia de la línea (120Hz). Esta señal de voltaje es utilizado por la corrección de factor de potencia del integrado LM3450, encargado del control del convertidor Flyback.
3.3.1.3 Convertidor DC/DC (Flyback)
Para el diseño de la fuente de alimentación se eligió el convertidor Flyback, debido a su facilidad de construcción comparada con otras topologías usadas en aplicaciones de baja potencia, además que es capaz de proveer un buen aislamiento. Para ello se utilizó el circuito integrado (IC) LM3450, elaborado por Texas Instruments, cuya función principal es brindar en un solo empaque los elementos necesarios para realizar la corrección de factor de potencia por control por frontera (Borderline Control) y el control adecuado del convertidor Flyback.
3.3.2 Controlador HPLED (Convertidor Buck)
La implementación del controlador HPLED se realizó con la ayuda de un convertidor Buck, debido a que su topología incluye un inductor que reduce de manera considerable el rizado de la corriente a la salida. Esta característica de fuente de corriente se adapta bien como alimentación de LEDs, que poseen un voltaje casi constante dentro de un gran rango de potencia. Para su control se optó por el circuito integrado (IC) LM3409HV, desarrollado por Texas Instruments, el cual utiliza un sistema de control por histéresis.
9
un lazo de compensación externo, lo que origina una velocidad de respuesta transitoria más precisa y un diseño más simple.[20] Los cambios en el tiempo de encendido y apagado del sistema generan un ciclo útil variable y una frecuencia de conmutación variable sobre todo el rango de operación.[20] Este sistema de control es muy interesante para este proyecto, por la razón que el controlador puede ser operado en modo de conducción continua y modo de conducción discontinua, a la vez que provee una regulación de corriente muy buena y sobre todo el rango de operación de funcionamiento de los HPLEDs.[20]
Además debido que este integrado es un controlador, la corriente máxima alcanzable no está limitada internamente por el integrado, lo que le da flexibilidad para ser utilizado en diseños versátiles, como proyectos futuros, en donde se requiera realizar modificaciones rápidas en el diseño sin impactos muy graves en la eficiencia.
3.3.3 Luminaria HPLED
En la escogencia de la luminaria se tuvieron en cuenta varios módulos completos de luminarias de diferentes marcas tales como Lighting Science, Toshiba, Vossloh Schwabe, Sylvania, Philips, Verbatim, Cree. Sin embargo, estas no cumplían con los requerimientos de flujo luminoso necesarios para alcanzar los objetivos del proyecto de grado, además su gran tamaño es un inconveniente para implementarlo en un modelo a escala. Por este motivo se optó por HPLEDs individuales de la compañía Cree y se escogió la referencia ML-E LED primero por su gran variedad de temperatura de colores, su alto índice de reproducción cromática (CRI), su alto rendimiento en cuanto potencia contra flujo luminoso (58 lm @ 0.5 W), su bajo consumo de potencia (9.6V @ 50 mA) y su tamaño reducido para lograr hacer los arreglos y así lograr la luminancia deseada, la cual está entre el rango de 70 a 220 luxes por luminaria.
3.3.3.1 Arreglo HPLED
Cada luminaria vendrá conformada por un arreglo 15 HPLEDs que suministran una intensidad máxima de 220 luxes medida a una distancia de 85cm y con un ángulo de 0° aproximadamente. (Puede variar por la disposición de los HPLED en el arreglo y del sensor).
Para la disposición de los HPLEDs en el arreglo se escogió la topología serie frente a la topología en paralelo, ya que en esta última los diodos (inclusive de la misma referencia), pueden tener leves diferencias. Esto causa que pase más corriente por uno que por el otro. Al tener uno más corriente circulando, este se va calentar más haciendo que su voltaje térmico aumente. Lo que a su vez va a hacer que aumente todavía más la corriente, hasta llegar el punto en que éste se queme. Como la corriente total no va a cambiar, la demás corriente adicional se va a ir por el siguiente diodo, haciéndolo quemar también. Así el mismo ciclo seguirá sucesivamente hasta quemar toda la luminaria.
3.3.3.2 Maqueta
Para que haya una mayor flexibilidad en la ubicación de las luminarias, adicionalmente a esto, debido a que todas las luminarias van a tener las mismas características, el sistema total que consta de 4 luminarias se dividió en 4 subsistemas más pequeños. Los cuales están conformados por la luminaria, el sensor, el controlador HPLED y la fuente de alimentación. Con la finalidad de unir todos estos componentes se utilizó una plataforma o maqueta, que fijará los componentes de acuerdo a los objetivos del proyecto.
10 3.3.4 Control del Sistema
Con el propósito de realizar el control del sistema total (Controlador/ Luminaria /Sensor), se realizó primero la caracterización del sensor, para proseguir después con la del controlador HPLED. Y finalmente con la de todo el sistema que incluye el controlador, el arreglo HPLED y el sensor, colocados debidamente en la maqueta antes explicada. Después se prosigue al desarrollo teórico e implementación del controlador PID en un microcontrolador. Para luego finalizar con la comunicación desde el computador a la luminaria, todo esto con el propósito de poder variar la intensidad de iluminación en un valor deseado dentro de un rango de 70 a 220 luxes con la ayuda de una interfaz de usuario.
3.3.4.1 Sensor de Luz Ambiente
Con la finalidad de medir la intensidad de luz en los HPLEDs se escogió el sensor LX1972, elaborado por la empresa Microsemi, debido a que tiene una respuesta bastante lineal y precisa, lo que facilita bastante el control y es capaz de medir el rango de iluminación propuesto como objetivo para el trabajo de grado. Además ofrece la ventaja de que su respuesta se puede convertir en un voltaje poniendo una resistencia en cualquiera de sus dos pines, siempre y cuando estén en el rango de 10kΩ a 100kΩ. [22] También ofrece otra ventaja para el proyecto, la cual es que con una alimentación mínima de 1.8V puede funcionar hasta con una intensidad luminosa de 1000 luxes, lo que lo hace bueno para esta aplicación, ya que puede ser alimentado con el mismo voltaje del microcontrolador.
Adicionalmente a esto el sensor tiene un pico de respuesta espectral en los 520nm, haciendolo similar a la del ojo humano.
3.3.4.2 Microcontrolador (PID)
Para la escogencia del microcontrolador se optó por uno comercial, económico y fácil de programar, pensando en esto se escogió el microcontrolador ATMEGA328P de la empresa Atmel Corporation, el cual puede funcionar hasta con una velocidad máxima de 20 MHz, además tiene 6 canales ADC de 10 bits, 4 para los 4 sensores y 2 para la comunicación I2C con el DAC encargado de convertir la señal digital de salida del microcontrolador a un voltaje análogo capaz de ser interpretado por el controlador HPLED. El DAC escogido fue el MCP4728 el cual cumple con los requisitos del trabajo, como lo son la comunicación I2C, tener 4 canales independientes para la comunicación con las 4 luminarias y además tener una excelente resolución al ser capaz de entregar una salida de 12 bits.
También el microcontrolador es el encargado de ejecutar las instrucciones del PID. (Ver Anexo diagrama de flujo del software del microcontrolador)
3.3.4.3 Interfaz de Usuario
11 4. SISTEMA DE ILUMINACIÓN
Después de haber explicado cada una de las partes que componen este trabajo de grado, lo que sigue es explicar paso por paso el desarrollo de este proyecto.
El primer paso es el desarrollo del sistema de iluminación, compuesto del arreglo HPLED y la maqueta, adicionalmente a esto, el método escogido para la regulación de la corriente.
4.1 Desarrollo de la Maqueta
Como se explicó anteriormente, el sistema compuesto por una luminaria, (excluyendo el microcontrolador y el módulo Zigbee encargado de la comunicación con el computador), está conformado por el sensor, el arreglo HPLED, el controlador o convertidor BUCK y la fuente de alimentación (Convertidor FLYBACK). Para la unión de estos componentes y con el propósito de que el sistema (Sensor/Arreglo HPLED) no tuviera perturbaciones debido al cambio en la distancia de estos dos componentes, ni en el ángulo en el que se toma el valor de iluminación (Lux), se optó por construir una maqueta que fijara estos dos componentes.
Gráfica 2. Vistas superior, inferior y lateral de la maqueta
12 4.2 Escogencia de la Luminaria
En la descripción del diagrama de bloques, se habló acerca de la escogencia de la luminaria, lo primero que se realizó fue la búsqueda de módulos completos de luminarias, pero debido al inconveniente de que no cumplían con los requerimientos de flujo luminoso necesario para alcanzar los objetivos del proyecto y también al inconveniente presentado por parte de su gran tamaño en la inclusión de una maqueta o modelo a escala de las luminarias, se optó por HPLEDs individuales de la compañía Cree y se escogió la referencia ML-E LED, por su gran variedad de colores, su alto índice de reproducción cromática (CRI), su alto rendimiento en cuanto potencia contra flujo luminoso (56,5 lm @ 0.5 W), su bajo consumo de potencia (3,2V @ 150 mA) y logrando así hacer los arreglos de un tamaño reducido y así lograr la luminancia deseada, la cual está entre el rango de 70 a 220 luxes a una distancia 85 cm para cada luminaria independientemente .El proceso de
binning o agrupamiento está avalado por la norma ANSI lo que garantiza un gran desempeño de los
HPLEDs blancos que son los que se van a escoger para la luminaria.
A continuación se presenta un cuadro con sus características tanto físicas, como eléctricas y de iluminación:
[image:12.612.147.463.290.553.2]Fuente: Pagina Web de Cree, Inc , consultado el 15 de septiembre de 2012 Tabla 1. Características de los HPLEDs Seleccionados
13
Fuente: Datasheet XLamp ML-E LED, Cree, inc, consultado el 15 de octubre del 2012 Gráfica 3. Curva de Iluminación Relativa Vs Corriente del HPLED (mA)
Escogiendo el peor de los casos (15 lux) y al necesitar 220 luxes como máximo se optó por utilizar 15 HPLEDS, lo que daría un rango máximo de 225 a 240 luxes (valor dado por el mejor de los casos 16 lux por HPLED). Lo cual está por encima del objetivo de iluminación, por lo que es posible fijar gracias al control un valor de entre 70 luxes aproximadamente, dependiendo de las condiciones lumínicas del área a iluminar a 220 luxes, en un ambiente aislado de la luz externa. Dado que cada HPLED consume 3,2V como valor típico (puede ser un poco mayor o un poco menor), el total de la carga para el diseño del controlador es de 48V.
4.3 Control del Nivel de Intensidad de los HPLEDs
A pesar de que en un comienzo se pensó hacer la regulación de los HPLEDs por PWM debido a su alta popularidad en la industria de la regulación LED, gracias a su amplio rango de regulación y su relación lineal entre la intensidad de salida de los LEDs y el ciclo útil.[20]. Se optó por la regulación análoga o (CCR) Continuous current reduction, debido a que el control por PWM para su funcionamiento necesita funcionar a altas frecuencias para que el ojo humano no perciba el cambio de estado de cero corriente a corriente nominal. Mientras mayor sea la frecuencia, menor es la probabilidad de que el ojo humano perciba el parpadeo, mayor a 200 Hz puede ser suficiente para que la visión periférica no lo perciba, pero para eliminar efectos indeseables como los estroboscópicos, la frecuencia tiene que ser aún más alta. [17] Estos es un problema a bajos niveles de iluminación, debido a que la resolución está determinada por la exactitud del ancho de pulso y la frecuencia del PWM, por ejemplo para obtener 12 bits , es decir 4096 niveles , la resolución con un tiempo de ciclo de 250 Hz requiere un impulso mínimo de 0.97 µs, lo que hace requerir un ancho de banda de más de 1MHz para conservar la integridad del impulso mínima.[17] Esto genera problemas de interferencias electromagnéticas (EMI) más aun cuando se trata de sistemas que van a estar funcionado con otros sistemas de automatización del edificio , como control de incendios o alarmas contra intrusos y demás. Otro problema que se suma a esto, es que se pueden experimentar problemas de rendimiento si el control está muy lejano a la fuente de luz, debido a características eléctricas, como capacitancias e inductancias en los tramos largos del alambre que une estos dos nodos, ya que esto puede afectar los tiempos rápidos de subida y de bajada necesarios para un control de luz preciso. [7]
14
bajos, lo que provoca menor pérdida de eficiencia por temperatura y por potencia eléctrica disipada. En cambio por PWM se está trabajando siembre con un voltaje de operación de máxima intensidad de iluminación. [20] Por otro lado a plena potencia, es decir en el método de PWM con un ciclo de trabajo del 100% y el de CCR a corriente máxima los dos son iguales en términos de eficiencia.[17] El único inconveniente del método CCR es que las características en cuanto a temperatura de color pueden variar con base en la corriente directa suministrada, es decir que por ejemplo a corriente de 150mA la temperatura de color puede ser 2700K y a 200mA ser de 3000K , como este no es inconveniente muy grave un ámbito doméstico. Es mejor el control por regulación análoga o CCR para este tipo de aplicaciones.
5. CONTROLADOR HPLED
Para controlar los HPLEDs se buscó un controlador que pudiera suministrar una corriente constante y que tuviera un rango muy lineal, además de un amplio rango de regulación para controlar la intensidad de los HPLEDs. Es por esto que se optó por una topología BUCK o reductora, lo que ofrece una ventaja muy importante, la cual es tener un inductor a la salida, el cual garantiza gracias a la ayuda del control que se va suministrar una corriente constante. Es por esto que se escogió el LM3409QHV que trabaja con voltajes de entrada de 6V a 75V, el cual es un voltaje muy superior al arreglo de 48V de los HPLEDs, esto con el fin de que haya una adecuada regulación de la corriente. Otra ventaja adicional es que requiere de muy pocos componentes y es capaz de suministrar un valor de corriente muy preciso gracias al método de control que utiliza. El funcionamiento del controlador HPLEDs, utiliza una arquitectura de control por histéresis, con la que asegura una corriente constante sin necesidad de un control de lazo de compensación externo.
5.1 Detector de Corriente Pico
Esta arquitectura consta de dos partes, la primea es un detector de corriente pico, el cual se muestra a continuación:
15
Al inicio del periodo de conmutación el convertidor BUCK o controlador HPLED, hace que el MOSFET Q1 se encienda y la corriente por el inductor L1 empieza a crecer de forma lineal. Luego gracias al voltaje en la resistencia RSNS se detecta el pico de corriente en la inductancia, el MOSFET Q1 se apaga y el diodo D1 se polariza en directa. En este momento el inductor es el encargado de suministrar la corriente a los HPLEDs, haciendo que esta disminuya de forma lineal.
Para que la detección de corriente pico se realice, como se mencionó antes se utiliza el voltaje diferencial sobre la resistencia RSNS. Este voltaje es comparado con un voltaje umbral interno ajustable (VCST), si el voltaje sobre la resistencia RSNS excede el voltaje VCST, el MOSFET Q1 se apaga. Lo que genera un tiempo de encendido del MOSFET ajustable, que por recomendaciones del fabricante tiene que ser mayor a 115ns, debido a que el integrado no alcanzaría a detectar el pico.
Aplicando un voltaje de 0 a 1,24V en el pin IADJ del integrado, se controla este voltaje interno cuyo máximo valor es 248mV, lo que provoca una atenuación de la corriente dada por la siguiente ecuación:
����= ���� 5∗ ���� −
��� − �� 2
En donde:
Iled es la corriente sobre el arreglo HPLED Vadj es el voltaje sobre el pin IADJ ( 0 a 1.24V) RSNS es la resistencia de sensado de corriente ��� − �� es la variación de corriente sobre la bobina
5.2 Control de Tiempo de apagado
El siguiente elemento del control por Histéresis es un control de tiempo de apagado, este comienza a funcionar luego de que el detector de pico apaga el MOSFET, en ese momento el MOSFET permanece apagado por un tiempo dado por el Voltage de salida, una resistencia y un condensador externos llamados ROFF y COFF como se demuestra en la siguiente figura.
Fuente: Datasheet LM3409HV, Texas Instruments , consultado el 12 de enero del 2013 Gráfica 5. Circuito del Control de apagado
16
interna del integrado, un MOSFET interno se enciende, haciendo que el condensador Coff se descargue inmediatamente. El tiempo de apagado se halla por medio de la ecuación del condensador.
Además de la capacitancia COFF se le añade una capacitancia parasita de 20pF, que se da en este pin, el cual se menciona en el datasheet del integrado.
Luego se despeja el tiempo y se produce la siguiente ecuación:
����=−�����(����+ 20��)�(1−1,24� �� ) 5.3 Diseño y Cálculos del controlador
El diseño del controlador LM3409QHV se realizó con base en el datasheet de este integrado, adicionalmente a esto se le añadió un condensador a la salida, es decir en paralelo al arreglo HPLED para disminuir la variación de corriente, debido a que una disminución de voltaje produce una gran disminución en el rizado o variación de corriente, debido a las características exponenciales de los HPLEDs. Este condensador logró reducir considerablemente la variación de la corriente en la inductancia, lo que permite además la disminución del parpadeo y ayuda a que la corriente de este arreglo, no supere nunca la corriente máxima de 175mA de los HPLEDs
Los parámetros que va a tener el controlador HPLED de acuerdo a los objetivos del trabajo son los siguientes:
Voltaje de entrada 70 V
Voltaje de entrada máximo 75 V
Voltaje de salida 48 V
Corriente de los HPLEDs 150 mA
Variación pico del voltaje de entrada 0.8 V Voltaje de encendido para la protección 10 V Voltaje de Histéresis para la protección 1,1 V
Frecuencia de conmutación 110 kHz (muy por encima de la frecuencia perceptible por el ojo humano 250 Hz y de
[image:16.612.78.528.374.509.2]la frecuencia audible 20 kHZ) Tabla 2. Especificaciones del Controlador HPLED
Para mayor organización los cálculos se van a dividir de la siguiente manera: 1) Frecuencia de conmutación nominal:
�����= −
(1− �� ƞ ∗ ���)
((�����+ 20 ��)∗ ��� ∗ln�1−1,24 � �� �) En donde:
17 Ƞ: Eficiencia esperada.
COFFL: Condensador del control de apagado. ROFFL: Resistencia del control de apagado. Fsw: Frecuencia de conmutación.
�����= −
(1−0,848 ∗70 � �)
((2,2 ��+ 20 ��)∗110 ��� ∗ln�1−1,24 � 48 � �)
�����= 22351 ����� 22�Ω
����=−((����+ 20��)∗ ���� ∗ln (1−1,24 � �� ) ����=−((2,2 ��+ 20 ��)∗22 �Ω ∗ln�1−1,24 �
48� �= 5,2 µ�
En donde Toff es el tiempo de apagado del MOSFET Q1.
���=
(1− ��� ∗ ���)
���� =
(1−0,848 ∗�70)
5,2µ� = 27472 ����� 27�ℎ�
2) Variación de corriente a través del inductor:
�1���=�� ∗ ���� ��� − �� =
48� ∗5,2µ�
250 �� = 1024 µ� En donde:
Toff: Tiempo de apagado del MOSFET Q1. �iL-pp: Variación de la corriente del inductor L1. Se escoge un valor comercial de 1000 µH
��� − ��=�� ∗ ���� �1��� =
48� ∗5,2 µ�
1000 ������= 250 ��
3) Corriente promedio sobre el HPLED:
�� − ���=������+��� − ��
2 = 150 ��+
200 ��
2 = 250 ��
En donde:
18
Asumiendo VADJ=1,24 V, en donde Vadj es el voltaje del pin de ajuste.
���������= ���� 5∗ �� − ���=
1.24�
5∗250 ��= 0.992Ω�����������1Ω
En donde Rsns es la resistencia de medición de la corriente que pasa por Q1.
������= ���� 5∗ ���� −
��� − �� 2 En donde:
Vadj : Voltaje del pin de ajuste.
Rsns HPLED: Resistencia de medición de la corriente que pasa por Q1. �iL-pp: Variación de la corriente del inductor L1.
������= 1,24 � 5∗1 Ω −
61,44 ��
2 = 152,98 ��
4) Capacitancia de salida (COLED):
Asumiendo rD=2Ω
��= �� ∗ ������� − �� ��� − �� − ������� − ��=
313,75Ω ∗0.5 ��
61.44 �� −0.5 ��= 2.5743 �Ω
En donde:
rd: Resistencia dinámica del arreglo HPLED. Resolviendo COLED-Min:
COLED−min = 1
(2� ∗ ��� ∗ ��)
En donde Co-min: Capacitancia mínima de salida:
COLED−min = 1
(2� ∗111 �ℎ� ∗2,5743 �Ω)= 557��
Por lo que se escoge un valor comercial de 1 µF>0.557µF 5) Capacitancia de entrada (CINL1) :
���= 1
��� − ����= 1
19 En donde:
Ton: Tiempo de encendido del MOSFET Q1. Toff: Tiempo de apagado del MOSFET Q1. Hallando CINL1-Min:
����1− ���= ������ ∗ ��� ���� − �� =
152,98�� ∗7,73 µ�
1,5� = 0,788 µ� En donde:
CINL1-min es la capacitancia de entrada del controlador HPLED. Ton: Tiempo de encendido del MOSFET Q1.
IHPLED: Corriente promedio del HPLED.
�Vin-pp: Variación pico a pico del voltaje de entrada. Escogiendo 1µF>0.788µF
���� − �� = ������ ∗ ��� ��� − ��� =
152.98 �� ∗7,73 µ�
1 µ� = 0,326�
Determinando IN-RMS, corriente de entrada RMS:
�� − ���=������ ∗ ��� ∗ ���� ∗ ����
En donde:
IHPLED es la corriente promedio del arreglo HPLED. Fsw: Frecuencia de conmutación.
Ton: Tiempo de encendido del MOSFET Q1. Toff: Tiempo de apagado del MOSFET Q1.
�� − ���= 157,029 �� ∗413 �ℎ� ∗ �2,075 µ� ∗346 ��
�� − ���= 54,95 ��
6) MOSFET (Q1 HPLED):
Determinando el mínimo voltaje y corriente del MOSFET Qd de conmutación: �����=��� − ���= 75 �
En donde Vtmax es el voltaje máximo al cual se somete el transistor.
��=� ∗ ������=�� ∗ ������ ��� ∗ � =
48� ∗157,029 �� 70 � ∗0.8
En donde:
20
IHPLED: Corriente promedio del arreglo HPLED.
Vo: Voltaje de salida nominal, es decir el voltaje total del arreglo de HPLEDs. VINLED: Voltaje de entrada nominal con el que se va alimentar el controlador. Ƞ: Eficiencia esperada.
��= 134,6 ��
Después determinando ITRMS y PT:
�� − ���=������ ∗ �� ∗(1 + 1 12∗ �
��� − �� �������
2
)
En donde:
IT-rms: Corriente RMS que pasa por el MOSFET de conmutación. IHPLED: Corriente promedio del arreglo HPLED.
�iL-pp: Variación de la corriente del inductor L1.
�� − ���= 157,029 �� ∗ � 48 �
70 � ∗0,8∗(1 + 1 12∗ �
16.608 �� 157.029 ���
2
)
�� − ���= 145,45 ��
Escogiendo el IRF9530N con Rdson=0,2Ω
��=�����2∗ �����= 4,23 ��
7) Diodo Schottky (D1LED):
Determinando el mínimo voltaje y corriente del diodo:
�����=������= 75 � En donde:
Vdmax: Voltaje del diodo máximo.
��= (1− �)∗ ������=�1− ��
� ∗ ���� ∗ ������ En donde: IHPLED es la corriente promedio del arreglo HPLED
��=�1− 48 �
0,8∗70 �� ∗157,029 ��= 22,43 ��
21 ���2 = �ℎ��
22 µ�= 1,1�
22 µ�= 50 �Ω
Escogiendo la resistencia de precisión de 49,9 KΩ con 1% de tolerancia, el nuevo voltaje de histéresis es igual a:
����=���2∗22 µ�= 49,9 �Ω ∗22 µ�= 1.1 �
Por lo que RUV1 es igual a:
���1 = 1,24 � ∗ ���2 ������� −1,24 �=
1,24 � ∗49,9 �Ω
10 � −1,24 � = 7,06 �Ω
Escogiendo la resistencia de precisión de 6,98 kΩ con 1% de tolerancia, el nuevo voltaje de Turn -on es igual a:
����� − ��=1,24� ∗(���1 +���2)
���1 =
1,24� ∗(6,98�Ω+ 49,9�Ω)
6,98�Ω = 10,1�
En donde:
Ruv1 y Rv2 son las resistencias que conforman el divisor de bloqueo UVLO, el cual es una protección que apaga el controlador si el voltaje de entrada baja lo suficiente como para impedir el buen funcionamiento del controlador HPLED. Y Vturn-on es el voltaje en el cual debe estar el voltaje de entrada, para que se vuelva a encender el controlador en caso de que se apague por esta protección. El voltaje de apagado es:
��������=����� − �� − ����� − �� = 9 V Es decir que el voltaje de entrada no debe ser más bajo que este valor.
22
Gráfica 6. Circuito del Controlador HPLED
VADJ es el voltaje que se va a usar para controlar la intensidad de los de los HPLEDs, el cual es un voltaje que está entre 0 y 1,24V. Como el integrado siempre va a estar encendido, debido a que no se va a usar un control por PWM, el pin EN se coloca en un nivel alto lógico por medio de un corto circuito con el voltaje de entrada.
6. FUENTE DE ALIMENTACIÓN DEL CONTROLADOR DESDE LA RED ELÉCTRICA COMERCIAL
Debido a que la luminaria se va a alimentar a partir del voltaje de la línea se optó por una fuente conmutada, también se pudo haber usado transformadores operando a 60 Hz pero estos presentan un elevado costo, excesivo peso y volumen, así como un bajo rendimiento de conversión generando altos niveles de calor.[10] Una fuente lineal podría ser otra opción, pero estas tiene una eficiencia de un 30 a un 50 %.[10] Lo que significaba que por cada vatio entregado a la carga, al menos un vatio debe ser disipado en calor. Además el costo del disipador de calor para las fuentes lineales mayores de 10 vatios, hace que dichas fuentes no resulten económicas. Por esta razón, se escogió una fuente conmutada la cual opera dispositivos de potencia en los estados de encendido y apagado. De esto resulta que en el estado de encendido, grandes corrientes atraviesen el dispositivo de potencia con bajos voltajes y en el de apagado, bajas corrientes con un alto voltaje a través del dispositivo, teniendo como resultado que haya mucho menos potencia disipada en la fuente. En promedio las fuentes conmutables tienen una eficiencia de un 70 a 90 % sin importar el voltaje de entrada. [10] Antes de escoger el circuito integrado se tiene que escoger que tipo de convertidor DC-DC se va a usar, buscando así alimentar el controlador HPLED a 70V. Por lo que se optó por una topología
FLYBACK en donde el transformador ofrece un aislamiento entre la entrada y la salida, además su
23 6.1 Convertidor Flyback
El diseño del convertidor FLYBACK, el cual junto al filtro EMI y el rectificador de onda completa, cumplirá la función de alimentación del controlador HPLED, está descrito por el siguiente diagrama de bloques:
Gráfica 7. Diagrama de Bloques del Convertidor Flyback
El diagrama de bloques muestra el funcionamiento del convertidor FLYBACK, para una mejor explicación del funcionamiento del convertidor se divide en 4 partes compuestas por el filtro EMI, el rectificador de onda completa, la explicación del funcionamiento del convertidor y de su etapa de control, en la que se incluye el funcionamiento de la corrección del factor de potencia del integrado LM3450, el cual también actúa como controlador del convertidor FLYBACK.
6.1.1 Filtro EMI
24
Gráfica 8. Filtro EMI del Convertidor Flyback
Para hallar la función de transferencia se descompuso en 4 impedancias de la siguiente manera: Z1: RAC1 en paralelo con LAC1.
Z2: RAC2 en paralelo con LAC2. Z3: CAC.
Z4: RDAMP1 en serie con CDAMP1.
Para hallar la impedancia del filtro se halla la función de transferencia, para eso se nombra otra impedancia que es Z5, la cual está conformada por Z1 y Z2 en serie, asumiendo que Z1 y Z2 son iguales, Z5 es 2Z1.
�1 = 1 1 ���1+���1�1
= ���1���1∗� ���1∗�+1
; �5 = 2�1 = ���2���∗� ���∗�+1
�3 = 1
���∗� ; �4 =�����1 + 1 �����1∗�
Por lo que la impedancia de salida del filtro queda como:
�������(�) = 1 1
�5(�)+ 1 �3(�)+
1 �4(�)
= ��� ∗ ��� ∗ �(�����1∗ �����1∗ �+ 1)
�2���� ∗ ���+�����1(���+ 0.5�����1)� ∗ ���+� ∗0.5(�����1∗ ��� ∗ �����1 +���) + 0.5���
La función de transferencia del filtro es igual a:
25 ���4.3 = 1
1 �4(�)+
1 �3(�)
= ��� ∗ �(�����1∗ �����1∗ �+ 1) �2∗ ��� ∗ �����1 +� ∗ �����1∗ �����1 + 1
La frecuencia de corte está determinada por:
��= 1
√���1∗ ��� Y el factor de amortiguamiento es:
Ϛ= ���1
2�����1√���1∗ ���
El factor de amortiguamiento describe el comportamiento de la ganancia alrededor o en las proximidades (borde), de la frecuencia de corte. Para un buen compromiso entre tamaño y rendimiento del filtro, es bueno escoger un factor de amortiguamiento menor a 0,7, el cual garantiza una atenuación de 3db por década en la frecuencia de corte y favorece la estabilidad en el sistema de control final. [9]
La función de RDAMP1 es reducir el pico de la impedancia de salida del filtro en la frecuencia de corte. El condensador CDAMP1 debe tener menor impedancia que RDAMP1 en la frecuencia de resonancia y su valor debe ser más grande que CAC, que es el condensador de la frecuencia de corte del filtro, con el fin de no afectar dicha frecuencia.
Un valor óptimo de RDAMP1 sería igual a [9]:
�����1 =�� �
�����1 = 4���
De acuerdo a lo anterior, para una frecuencia de corte de 18 kHz, la cual está por debajo de la frecuencia de conmutación de la fuente.
Escogiendo LAC como 1mH de acuerdo a la fórmula de la frecuencia de corte CAC queda de 39nF.
�����1 =�� �
�����1 =160Ω
Escogiendo un valor comercial superior, se escoge 220 Ω.
�����1 = 4∗ ���= 160 ��
26
Por lo que la función de transferencia del filtro quedaría de la siguiente manera:
�������(�) = 9,1∗10
−20�4+ 1,9∗10−12�2+ 2,9∗10−7�+ 5,2∗10−3
1,4∗10−22�4+ 3,8∗10−17�3+ 4,4∗10−12�2+ 2,9∗10−7�+ 5,2∗10−3
6.1.2 Etapa de Rectificación
Para esta parte se va a trabajar con un rectificador de onda completa, para que en la siguiente etapa que es el convertidor, se tenga una onda con solo ciclos positivos. La otra parte de esta etapa es un condensador, el cual tiene la función de eliminar el rizado en la señal de voltaje.
Gráfica 9. Rectificador de Onda Completa del Filtro EMI
6.1.3 Convertidor DC/DC y etapa de control
Como se ha venido mencionando para el diseño de esta fuente se elige el convertidor flyback, para ello se utiliza el circuito integrado LM3450, el cual está diseñado para trabajar con topología Boost , diseño no aislado y en topología flyback, este es un circuito integrado (IC) elaborado por Texas Instruments , el cual tiene la capacidad de realizar corrección de factor de potencia por control por frontera (Borderline Control), esto es debido a que opera en modo de conducción critica (CRM), el cual es el límite entre modo de conducción continua y modo de conducción discontinua. Esto se implementa haciendo que, cuando el MOSFET de conmutación principal se encienda, la corriente del inductor del primario se eleve a un umbral pico, luego cuando el MOSFET se apaga, la corriente cae hasta que alcanza el valor de cero. [19]
6.1.3.1 Control del factor de potencia del integrado LM3450
27 El funcionamiento del control por frontera es el siguiente:
Cuando el MOSFET se enciende, la corriente por el inductor crece hasta su valor pico, en ese momento el sistema de control manda una señal para que el MOSFET se apague, lo que provoca que la corriente por el inductor decaiga hasta cero. En ese momento el control vuelve a mandar una señal para que el MOSFET se prenda y el ciclo se vuelve a repetir de nuevo. [19]
Esto se puede observar en la siguiente figura:
Fuente: Datasheet LM3450, Texas Instruments, consultado el 20 de marzo del 2013 Gráfica 10. Funcionamiento de la Corrección de Factor de Potencia
El control del factor de potencia lo que busca es hacer que la corriente, que puede ser de entrada o salida del sistema, siga una referencia con la forma deseada. [11] .Para esto el convertidor utiliza dos mallas de control. Una externa lenta, la cual está encargada de regular el voltaje de salida con una referencia constante y una interna rápida encargada de darle la forma a la corriente de entrada para que sea proporcional al voltaje de entrada, su referencia en cambio de ser constante como la anterior es el producto entre una señal proporcional al voltaje de entrada y la señal de error del voltaje de salida.
28 6.1.4 Diseño del Convertidor y Cálculos
Para el diseño del controlador flyback se utiliza el datasheet del Integrado LM3450 y la nota de aplicación AN-2098 de Texas Instruments, por lo que no se va profundizar demasiado en el circuito, ya que no es esencial para el control de la planta y se extendería demasiado la descripción de este trabajo de grado.
Las características que tendrá el convertidor flyback son:
Frecuencia de la línea 60 Hz
Frecuencia de conmutación mínima 40 kHz (Algo mayor al rango audible)
Voltaje de entrada: 120 VAC
Voltaje de entrada mínimo 90 VAC Voltaje de entrada máximo 135 VAC Variación del voltaje de conmutación pico a la
entrada 60 V
Corriente pico límite 3 A
Máximo voltaje que soporta el MOSFET 400 V Máxima potencia a la salida 10 W
[image:28.612.79.541.177.326.2]Voltaje a la salida 70 V
Tabla 3. Especificaciones de la Fuente de Alimentación Cálculos preliminares:
Para el diseño de este convertidor es necesario hacer unos cálculos preliminares antes: Voltaje de entrada máximo:
VIN−PK−MAX = 135V∗ √2 = 191 �
Voltaje de entrada mínimo:
��� − �� − ���= 90� ∗ √2 = 127� Variación pico a pico del voltaje de entrada:
���� − �� = 64 Corriente máxima promedio a la en entrada:
��=�� ∗ ƞ ∗ �� =���� − �� ∗ ��� ∗ � ∗ �� En donde:
Pi es la potencia de entrada de la fuente. Po: Potencia de salida de la fuente. Ƞ: Eficiencia esperada de la fuente. FP: Factor de potencia.
Vmin-in: Voltaje mínimo de entrada RMS In: Corriente de entrada
�� − ���= 15 �
29 Corriente máxima pico a la entrada:
��� − �� − ���= 174 �� ∗ √2 = 308,1 �� Máxima corriente pico en el primario:
�� − �� − ���=246 �� ∗2
0,5 = 1,232 �
Corriente RMS máxima:
����=�����0.5
3 = 1,232 A � 0.5
3 = 503,14 mA
Cálculos del transformador: Máximo voltaje reflejado:
Vrmax =2
3(����� − �����)
En donde Vqmax es el máximo voltaje que será sometido el MOSFET. Vimax: Voltaje de entrada máximo.
Vrmax =2
3(400� −191�) = 140�
Vrmax = �Np
Ns� ∗70�
�NpNs�=Vrmax 70�
�NpNs�<140� 70� = 2
Na < 70 �
12,5 �= 5.6 �������������������= 5
En donde Np es el número de vueltas del primario. Ns: Numero de vueltas del secundario.
Na: Relación de vueltas del secundario al auxiliar.
�� − ��� = 0,5
2∗90 �
2∗40 ��� ∗308,1 ��= 913 µ�
Como esta es la inductancia mínima en el primario, se sobredimensiona un poco para evitar inconvenientes, por lo que se escogió:
30
Se optó por un núcleo de ferrita toroidal por su tamaño, teniendo en cuenta que para esta aplicación es importante que se tenga un tamaño reducido. Otra ventaja es que, dado que el campo magnético está confinado en el interior, los toroides y transformadores toroidales se pueden colocar cerca de otros componentes electrónicos sin preocupación acerca de las interacciones inductivas no deseadas. Otra facilidad de estos núcleos es que no hay necesidad de calcular gaps como por ejemplo en el núcleo tipo E.
De acuerdo con las frecuencias de trabajo se escoge un núcleo color Amarillo-Blanco, número 26 que funciona a frecuencias de hasta 100 kHZ.
Para escoger el tamaño se calculó la energía que tiene que almacenar el núcleo:
������������������������=��������������
���� = 214,3 ��
�=��
2
2 =
(1440µ� ∗214,3 ��2)
2 = 0,033 ����������
En donde L es el valor de la inductancia del primario y I es la corriente máxima en la carga.
Fijando una temperatura límite en núcleo de 40°C y con una energía almacenada de 2,18milijoules, se debe escoger un núcleo con un área producto mayor a 0,08 cm4.
Por lo que se escoge el núcleo toroidal T-157-26 como un área producto de 0,2 cm4 y cuyo factor de inductancia, AL es igual a 970 µH por cada 100 vueltas.
Con esos datos se calcula el número de vueltas del primario:
��=������������������������ ��
��=�1200µ�
97�� = 111,226 �����= 112 �������
La densidad de flujo magnético se calcula de la siguiente manera con las medidas de la tabla:
�=(��������� − ���������)
2 +���������=
(3,81 �� −2,413 ��)
2 + 2,413 ��= 3,11 ��
En donde dexterior es el Diámetro exterior del núcleo toroidal y dinterior es el diámetro interior del núcleo toroidal.
����= µ� ∗ µ� ∗ �
2�� ∗ �� − �� − ���
En donde Bmax es la densidad de flujo magnético del núcleo toroidal escogido
����= 4� ∗10
−7∗112
2� ∗3,11 �� ∗1,232 �= 887,357 µ�
31
��
�� = 2; ��= 112
2 = 56
;
�� ��=70 14= 5 =
�� ��
En donde Vs es el voltaje de salida de la fuente y Va es el voltaje en el auxiliar para alimentar el integrado LM3450.
��=56
5 = 11,2 ����� 12
Para el voltaje auxiliar que es el que va alimentar el integrado Lm3450 se escoge 14V, esto se hace pensando en el voltaje más bajo posible para no disipar mucha potencia en las resistencias que están conectadas al auxiliar y lo suficientemente alto para hacer funcionar el integrado correctamente. Diodo de recirculación:
Para escoger el diodo de recirculación primero se hallan ciertos parámetros como el voltaje máximo de bloqueo en sentido inverso del diodo:
��� − ���=����+���� − �� − ���
2 �
En donde Vout es el voltaje de salida de la fuente y Vin-pk-max es el voltaje de entrada máximo.
��� − ���= 70 �+�191 �
2 �= 165,5�
La máxima corriente pico del diodo:
�� − �� − ���=�� − �� − ��� ∗2 = 984 �� ∗2 = 1,968 � La corriente promedio máxima del diodo:
�� − ���=��� − �� − ��� ∗2 = 246 �� ∗2 = 492 �� La máxima disipación de potencia del diodo:
�� − ���= 492 �� ∗1� = 492 �� MOSFET:
Este MOSFET se escoge para bloquear el voltaje máximo pico a la entrada y conducir la máxima corriente del primario. Además necesita ser capaz de disipar la máxima potencia, que en el peor de los casos es cuando no hay carga o cuando hay un nivel mínimo de voltaje a la salida.
Para saber que MOSFET escoger se halla el voltaje máximo entre drain y source que él tiene que soportar
�����=��� − �� − ���+ (2∗ ����)
En donde Vout es el voltaje de salida de la fuente y Vin-pk-max es el voltaje de entrada máximo �����= 191 �+ (2∗70) = 331 �
32
�� − �� − ���=246 �� ∗2
0.5 = 984 ��
Lo mismo ocurre con la corriente RMS en MOSFET que es igual a:
����=�����0.5
3 = 984 mA � 0.5
3 = 401 mA
Por lo que se escogió el IRF730A con un voltaje de ruptura de 400V y con una resistencia de drain-source de 5,5Ω. Por lo que la máxima disipación de potencia en es de:
�� − ���= 401 ��2∗5,5Ω= 884,4 �� Corriente de sensado:
La resistencia de sensado es inversamente proporcional a un porcentaje por debajo de la corriente pico limite en el primario. Por lo que se calcula de la siguiente forma:
�30//�31 = 1,5 �� − �� − ���
�����=�30//�31 =1.5
3� = 0,5Ω
En donde Rsens es la resistencia que mide la corriente que circula por MOSFET de conmutación. La disipación de potencia por esta resistencia está en función de la corriente RMS máxima que circula por el MOSFET de conmutación:
� − �����=�� − ��� − ���2∗ �����= (401 mA)2∗0,5Ω= 80.4 ��
En donde It-rms-max es la corriente RMS máxima que circula por el diodo de conmutación y Rsens es la resistencia que mide la corriente que circula por el MOSFET de conmutación.
Por lo que se escogen dos resistencias de 1Ω de 1/4 W cada una
Capacitancia de entrada:
Este condensador tiene que ser capaz de proporcionar energía durante el período de conmutación en el peor caso del corriente pico de entrada AC. Este condensador debe ser de alta frecuencia y bastante estable, por lo que se escoge un condensador de película con voltaje nominal AC igual al máximo voltaje de entrada. Este condensador debe tener un voltaje nominal DC que exceda el máximo voltaje pico a la entrada, más la mitad de la variación del voltaje pico a pico a la entrada. Por lo que se calcula de la siguiente manera:
�1 = �� ∗ �� − �� − ���
2
(��� − �� − ���+���� − ��2 )2−(��� − �� − ��� − ���� − ��2 )2
En donde Lp es la inductancia del primario.
33 Vin-pk-min: Voltaje de entrada pico mínimo. �Vin-pk: Variación del voltaje de entrada pico
�1 = 1200 µ� ∗984 ��
2
(127 �+642)2−(127 � −642)2
= 71 ��
Por lo que se escoge un condensador de película de 0,1µF/250V mayor a los 0,071µF Capacitancia de salida:
Este condensador sirve como el almacenamiento principal de energía de la fuente. Este condensador debe ser un condensador electrolítico de alta calidad que pueda tolerar, largos pulsos de corriente asociados a la operación en modo crítico (CRM) de la fuente. El voltaje nominal de este debe ser de al menos 25% más grande, que el voltaje de salida regulada de la fuente, más la variación de voltaje permitida a la salida.
����= ���� − ��� 2∗ � ∗ �� ∗ ���� ∗ �����
En donde:
Pout-max es la potencia de salida máxima. FL: Frecuencia de la línea.
Vout: Voltaje de Salida.
�Vout: Variación del voltaje de salida.
����= 10 �
2∗ � ∗60 �� ∗70 � ∗0,7 �=541µ�
Por lo que se escogió un condensador electrolítico de 1000µF/100V mayor a los 541µF
Lazo de control de voltaje:
34
Fuente: Datasheet LMV431,Texas Instruments, consultado el 21 de junio del 2013 Gráfica 11.
Referencia de Voltaje LMV431
El voltaje de salida es sensado con un divisor resistivo y regulado a 1,24 V usando el circuito antes mencionado.
�81 = 1,24 � ∗ �72 ���� −1,24 � Escogiendo R72 como 105K
�81 =1,24 � ∗105 �
70 � −1,24 � = 1,89�Ω
Por lo que se escoge una resistencia comercial cercana de 1,87 KΩ
La función de transferencia entre el control y la salida del convertidor puede ser aproximada a la siguiente función:
���(�) =��� ∗ 1 (1 + �
��1) En donde:
Gco: Es la ganancia del control.
��1 =���� − ��� ����2∗ �11=
10 �
70 �2∗1000 µ�= 2 ��� ���
���= ���� �� − ��=
70 �
984 ��= 71,138 Ω
35 � =5 �Ω ∗ ��� ∗ �� ∗0,55
1
� ∗ ��� − �� (�30//�31)∗ �70
� =
5 �Ω ∗1∗0,01∗0,551
� ∗191 �
(0,5Ω)∗2 �Ω = 5,2525
En este control se usa un compensador PI en el secundario para estabilizar el sistema.
El amplificador de error es implementado con el LMV431, una resistencia y un condensador en serie que están en el lazo de retroalimentación. La salida del LMV431 está unida al cátodo del fotodiodo. El lado primario del optocoplador se conecta directamente a COMP del LMV431. Ya que internamente tiene una resistencia de pull-up de 5 kΩ, la corriente máxima a través del lado
primario del optocomplador será 1mA. Un polo de roll-off de alta frecuencia se coloca en el lado primario por medio de un condensador desde COMP a GND. También un divisor resistivo del voltaje de salida de la flyback se regula a 1,24 V que es una referencia interna del LMV431.
La función de transferencia del compensador es definida como:
�����(�) = (1 + � ��1) � ���2� ∗(1 +���3)
Donde el polo dos es definido como:
��2 = 1 �72∗ �35=
1
105 �Ω ∗10 µ�= 0,952 ��� ���
Y el cero del compensador es definido como:
��1 = 1 �77∗ �35=
1
30.1 �Ω ∗10 µ� = 3,32 ���
��� Y el polo de roll-off como:
��3 = 1 5 �Ω ∗ �24=
1
5 �Ω ∗1 µ�= 200 ��� ���
�����(�) =
(1 + � 3,32) � �0,952� ∗(1 +200� )
36 �(�) =�����(�)∗ �3450∗ ���(�)∗ ���= �
1 + � 3,32� � �0,952� ∗ �1 + �
200�
∗5,2525∗ 71,138∗ 1 (1 +2�)
�(�) =42857,47(�+ 3,32) �(�+ 2)(�+ 200)
El esquemático de la fuente flyback quedó de la siguiente manera: (ver anexo fuente flyback)}
7. SISTEMA DE CONTROL
Con el fin de realizar el control, el primer paso es la escogencia del sensor:
7.1 Escogencia del sensor
Para medir la intensidad de luz en los HPLEDs se escoge el sensor LX1972, ya que tiene una respuesta bastante lineal y precisa, lo que facilita bastante el control y es capaz de medir el rango de iluminación propuesto como objetivo para el trabajo de grado. Además ofrece la ventaja de que su respuesta se puede convertir en un voltaje, poniendo una resistencia en cualquiera de sus dos pines siempre y cuando estén en el rango de 10k a 100k. También ofrece otra ventaja para el proyecto la cual es, que con un voltaje no tan alto de alimentación mínimo 1.8V, puede funcionar hasta con una intensidad luminosa de 1000 luxes.
La polarización del sensor realiza con 5V para que sea compatible con la mayoría de microcontroladores del mercado y no se tenga que hacer cambios en los valores de tensión para cada componente de la parte de control, ya que esta parte va ir aparte del controlador y de la luminaria.
7.2 Medición de la velocidad del sensor
Para medir la velocidad del sensor, lo que se hace es inyectarles una función paso a unos HPLEDs de prueba y con el sensor se mide la señal que se produce con el fin de verificar cuál es su velocidad de respuesta.
El circuito empleado es el siguiente:
37 7.3 Caracterización del Sensor
La caracterización del sensor se realiza, tomando medidas del voltaje de salida del sensor a diferentes de niveles de iluminación, tomando como referencia un luxómetro. Lo que origina la siguiente gráfica:
Gráfica 13. Caracterización del Sensor
7.4 Caracterización del controlador HPLED
Para caracterizar el controlador se toman mediciones variando el pin Iadj, es decir el voltaje con el que se controla la regulación por CCR, luego anotando su valor y su correspondiente asignación en corriente.
La gráfica dada por estos datos es la siguiente:
Gráfica 14. Caracterización del Controlador HPLED 0
50 100 150 200 250 300 350
0 0.2 0.4 0.6 0.8 1 1.2
Nivel de Iluminación (Lux) vs Voltaje del Sensor (V)
0 20 40 60 80 100 120 140 160
38
7.5 Caracterización del sistema Controlador/Luminaria/Sensor
Para caracterizar el sistema, se realiza por medio del osciloscopio y del generador de funciones para esto se somete el pin de IAdj a un voltaje en forma de una señal escalón de 1.24V para ver la respuesta del sistema, luego se observa el voltaje a través del sensor y se toma el tiempo que tarda en llegar al 63.2% del valor en estado estacionario. Para ello se toman varias medidas y se saca el promedio. Luego para la ganancia se toman varios valores del voltaje de entrada (Vadj), el voltaje a través del sensor y su respectivo valor en luxes medidos a través de un luxómetro, suministrando la siguiente gráfica.
Gráfica 15. Caracterización del Sistema (Controlador HPLED/ Sensor)
Gráfica 16. Respuesta del Sistema Controlador/Sensor a una Entrada Escalón 0
50 100 150 200 250 300
0 200 400 600 800 1000 1200 1400
39
Después de tomar varias medidas de las ganancias en voltaje en el osciloscopio (voltaje del sensor contra voltaje de entrada del controlador HPLED) se halla la ecuación del sistema como se muestra a continuación:
��(�) =0,93�
−0,000150∗�
0,00126∗ �+ 1
Debido a que el retardo de la función de transferencia es muy pequeño en comparación con el τ del sistema, se expresa esta función de la siguiente forma:
��(�) = 0,93 0,00126∗ �+ 1
Lo siguiente a realizar es el diseño del controlador PID, para ello hay que definir ciertos parámetros:
- Señal de error (Entrada del controlador)
�(�) =������ − ������
En donde:
SetLux: Es el Setpoint o valor de luxes deseado y colocado en la interface de usuario, este es fijado por el controlador HPLED a través del voltaje en IADj por medio de un DAC que sale del microcontrolador.
Luxmed: Es el valor en lux que representa el voltaje que pasa a través de la resistencia del sensor.
- Señal de salida (Salida del controlador)
�(�) =��.�(�) +��
�� � �(�) +�� ∗ �� ��(�)
�� Por lo que en el dominio de Laplace quedaría de la siguiente manera:
��(�) =�� ∗ �(�) +�� ∗ 1
�� ∗ � ∗ �(�) +�� ∗ �� ∗ � ∗ �(�)
Lo que da como resultado una función de transferencia del bloque de control PID de la siguiente forma:
��(�) =��(�)
��(�)=��(1 +�� ∗ �+ 1 �� ∗ �)
Para simplificar un poco los cálculos la función de transferencia queda de la siguiente forma:
40 En donde:
��=�� ∗ ��
��=�� ��
Debido a que se va a diseñar el controlador se parte del siguiente diagrama de bloques:
Grafica 17. Diagrama de Bloques del Control
En donde el Bloque Saturador limita los valores permitidos para la entrada de la planta, dándole a ésta un adecuado funcionamiento debido a que siempre hay limitaciones de origen físico.
Para hallar la función de transferencia del sistema anterior primero hay que definir la multiplicación del bloque del control y del bloque de la planta el cual se llamará G(s).
�(�) =��(�)∗ ��(�)
Con lo cual G(s) queda de la siguiente forma:
�(�) =738.095∗(�� ∗ �
2+�� ∗ �+��)
�(�+ 793.651)
La función en lazo cerrado de todo el sistema queda de la siguiente forma
���(�) = �(�) 1 +�(�)
���(�) = (�� ∗ �
2+�� ∗ �+��)
(�1)∗ �2+ (�1)∗ �+��
En donde:
�1 =��+ 13, .48∗10−5 �1 =��+ 1,07526
Gc(s)
Bloque
Saturador
Gp(s)
41
Al normalizar el denominador este quedaría de la siguiente forma:
���(�) =�2+�1 �1∗ �+
�� �1
Para realizar el ajuste del controlador PID se iguala el denominador al de una función de transferencia deseada de segundo orden.
��(�) = � ∗ ��
2
(�2+ 2Ϛ ∗ �� ∗ �+��2)=
� ∗ ��2
��(�)
En donde:
��(�) = (�2+ 2Ϛ ∗ �� ∗ �+��2)
Con fin de facilitar el procedimiento se va tomar el denominador de la siguiente forma: ��(�) =�2+�1∗ �+�1
En donde:
�1 = 2Ϛ ∗ ��
�1 =��2
Luego se igualan las constantes que acompañan los coeficientes de Dp(s) a las del denominador de Glc(s) y se despejan las constantes del controlador kp, ki y kd.
Para despejar estos parámetros en términos de kp, ki y kd lo primero que hace es igualar (e1) a la constante (b1/a1) y despejar kp:
�� = 2∗ �� ∗ �� ∗ �+ 27,096∗10−4∗ �� ∗ � −1,075
Lo que sigue es igualar (f1) a (Ki/a1) y despejar ki:
�� = (��+ 36,8∗10−6)∗ ��2
Debido a que hay dos ecuaciones y 3 incógnitas, una constante va quedar dependiendo de la otra. Por lo tanto se supone un valor pequeño para la constante derivativa, de tal manera que disminuya el ruido de alta frecuencia y las oscilaciones a la salida del sistema.
Suponiendo Kd = 0.001, esto da como resultado las siguientes ecuaciones: ��= 2,088∗ �� ∗ � −1,075
42
Debido a que la respuesta transitoria de un sistema de entrada escalón unitario depende de las condiciones iniciales, es conveniente usar las características de salida para hallar los parámetros del controlador después de someterlo a algún tipo de entrada ya conocida, la cual una de las más usadas es la entrada escalón. [21] En consecuencia de que a este sistema en lazo cerrado se le añade al controlador, éste se convierte en un sistema de orden superior al de primer orden de la planta, haciendo que ciertos parámetros definan el comportamiento del sistema.
Como se quiere aproximar este sistema a un sistema de primer orden se va a fijar a un sistema sobre amortiguado, después de realizar la simulación y probar con varias constantes de amortiguamiento se fijó la siguiente:
�= 6.8
El otro parámetro que se usó es el tiempo de establecimiento, el cual indica el tiempo que se requiere para que la curva de la respuesta alcance un rango alrededor del valor final del tamaño especificado por el porcentaje absoluto. [21] Este tiempo de asentamiento se relaciona con la mayor constante de tiempo del sistema de control, dado por la ecuación que se muestra a continuación y dependiendo de la banda de tolerancia con respecto al valor final que se quiera permitir. Como se requiere que tenga un valor en estado estacionario algo preciso, se escoge una banda de tolerancia de 2% como esta se mide en constantes de tiempo (1/(� *Wn) este tiempo esta dado por la siguiente ecuación:
��= 4 � ∗ ��
Como criterio de diseño se selecciona un tiempo de establecimiento 1000 veces más grande que la constante de tiempo de la planta (1.26 ms), debido a que en sistemas de iluminación no es necesario un tiempo de respuesta tan pequeño, puesto que los cambios de iluminación demasiado rápidos, pueden causar molestias en el ojo.[24]
1.2�= 4 � ∗ ��
Lo que da como resultado:
��= 46,685
Al remplazar estos valores en las ecuaciones de Kp, y Ki. ��= 0,42
43 8. PRUEBAS Y ANÁLISIS DE RESULTADOS
Después haber realizado la caracterización de todos los componentes que va tener el sistema, se realiza la integración completa de éste, con el fin de comprobar su funcionamiento.
8.1Diagrama de Bloques y Análisis de la Simulación
Teniendo en cuenta las funciones trasferencia de los dispositivos, se prosigue a realizar la simulación del sistema completo por medio del programa SIMULINK.
El diagrama de bloques obtenido se puede observar en la gráfica 16. Los bloques ubicados en la parte izquierda de la gráfica corresponden a la referencia de entrada del sistema, que en este caso corresponde a una función escalón de 0 a 240 luxes, la salida de este bloque alimenta un bloque de ganancia, que se ve representado como la interfaz de usuario del sistema, la cual será la encargada de enviarle el nivel de setpoint al bloque de control PID. Este bloque tiene la función de establecer el nivel de iluminación basado en el setpoint que recibe en la entrada, dicho setpoint se traduce como un nivel de voltaje, que deberá ser comparado con el nivel de voltaje que está leyendo en el sensor, el cual es un valor representativo en luxes.
El control PID estará encargado de manera permanente de mantener la salida en nivel de setpoint establecido. Si la interfaz de usuario se establece un nivel de setpoint diferente, el procedimiento va ser el mismo pero con el nuevo valor establecido.
Gráfica 18. Simulación del Sistema Completo
44
Gráfica 19. Respuesta de la Simulación del Sistema a una Entrada Escalón
En la respuesta del sistema obtenida en la simulación se puede observar un tiempo de establecimiento de 1.6 segundos, el cual es mayor al tiempo establecido como parámetro de despeño del sistema el cual era de 1.26 segundos. Una de las causas de las diferencia es que la ecuaciones utilizadas están planteadas para sistemas de segundo orden subamortiduados, con algún porcentaje de sobreimpulso y no para sistemas lineales como los de iluminación.
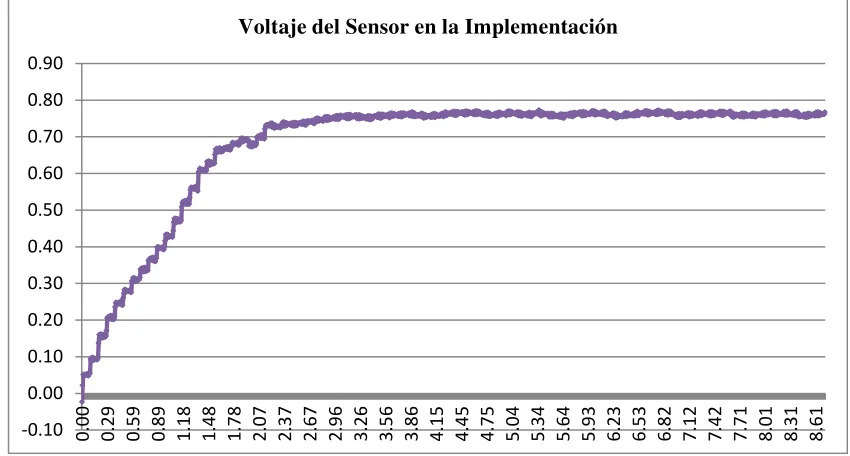
8.2 Resultados de implementación
Para realizar la implementación del sistema se utiliza el arreglo HPLED, controlador y sensor mencionados en los capítulos anteriores. Un microcontrolador se encarga de establecer la comunicación con la interfaz de usuario para fijar el setpoint del sistema y realizara también el control PID. Además 2 módulos Zigbee harán una comunicación punto a punto.