ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
“INTEGRACIÓN DE LA ETAPA DE CONTROL DE UN
MÓDULO DIDÁCTICO APLICADO AL CONTROL DE
MOVIMIENTO”
PROYECTO DE INVESTIGACIÓN
QUE PARA OBTENER EL TITULO DE INGENIERO EN
CONTROL Y AUTOMATIZACIÓN
PRESENTA
MARCO ANTONIO ROJAS MARTÍNEZ
ASESORES
M. EN C. PEDRO FRANCISCO HUERTA GONZALEZ
M. EN C. IVONE CECILIA TORRES RODRIGUEZ
Esta tesis está dedicada principalmente a mis padres, Antonio y Claudina, a quien agradezco de todo corazón por su amor, apoyo y comprensión. En todo momento los llevo con migo.
Agradezco a Dios por llenar mi vida de dicha y bendiciones y permitirme lograr esta meta que me propuse hace tiempo.
Agradezco el gran apoyo que recibí por parte de mi hermano en todo momento, Daniel.
Agradezco infinitamente a mi abuelita Raquel por brindarme su apoyo incondicional en todo momento, así como a mis tíos por sus consejos, orientación y el verdadero apoyo que recibí por parte de ellos.
Agradezco haber encontrado el amor y compartir bastantes experiencias con ella así como haber logrado metas que teníamos en común, claro Elizabeth.
Agradezco al Instituto Politécnico Nacional por haberme brindado las bases para un exitoso desarrollo personal y profesional.
Agradezco a mis asesores y profesores por su disposición y ayuda brindada a lo largo de mi preparación.
Objetivo general i
Índice general ii
Índice de figuras vi
Índice de tablas x
Índice de ecuaciones x
Apéndice y anexos x
Introducción general xi
Descripción del proyecto xii
Delimitación del trabajo xiii
Justificación xv
Aportaciones del trabajo xvi
Glosario de Términos, Abreviaturas o Siglas xvii
Capítulo 1 Introducción al proyecto de investigación 1
1.1 Introducción 2
1.2 Delimitación del lugar en donde se involucra el proyecto 2
1.3 Estudio del problema a resolver 3
1.4 Solución propuesta 4
1.5 Estado del arte 5
Capítulo 2 Diseño de una estación principal de trabajo para
el control de movimiento
14
2.1 Introducción 15
2.2 Control de Movimiento 15
2.3 Elementos del control de movimiento 16
2.3.1 Accionamientos 16
2.3.2 Transmisión mecánica 17
2.3.3 Medición e indicación de movimiento 18
2.3.4 Servoaccionador 18
2.3.5 Controladores 19
2.3.6 Software de control de movimiento 20
2.4 Tipos de controladores de movimiento 20
2.4.1 Sistema de control centralizado 21
2.4.2 Sistema de control distribuido 22
2.4.3 Sistema de control híbrido 24
2.5 Metodología para la integración de sistemas de control y automatización
25
2.5.1 Selección de módulos de E/S 26
2.5.2 Selección de comunicaciones de red 27
2.5.3.1.2 Tecnologías EtherNet 32
2.5.3.1.3 Direcciones IP 33
2.5.3.2 Protocolo ControlNet 33
2.5.3.2.1 Beneficios de ControlNet 33
2.5.3.2.2 Dispositivos típicos de ControlNet 34
2.5.3.3 Protocolo DeviceNet 34
2.5.3.3.1 Beneficio de DeviceNet 34
2.5.3.3.2 Dispositivos típicos de DeviceNet 35
2.5.3.4. Determinación del protocolo adecuado 35
2.5.3.5 Módulos especiales 36
2.5.4 Selección del chasis 37
2.5.5 Selección de controladores 37
2.5.5.1 Determinación de los requisitos de memoria del controlador 38
2.5.5.2 Requisitos de batería 39
2.5.5.3 Uso de las tareas de un controlador 39
2.5.6 Selección de fuentes de alimentación eléctrica 39
2.5.7 Selección del software 41
2.5.7.1 Software de programación 41
2.5.7.2 Software de comunicación 42
2.5.7.3 Software de configuración 42
2.6 Análisis del equipo a emplear 44
2.6.1 Fuente de alimentación eléctrica 1768-PA3 45 2.6.1.1 Protección de la fuente de alimentación eléctrica 45
2.6.1.2 Disipación de energía de la fuente 45
2.6.1.3 Requisitos de la alimentación de entrada de la fuente 46
2.6.1.4 Perdida de la fuente de alimentación 46
2.6.1.5 Montaje de la fuente de alimentación eléctrica en un riel DIN 47 2.6.1.6 Conexión de los cables de la terminal de alimentación de
entrada
48
2.6.1.7 conexión de la fuente de alimentación al equipo 48 2.6.1.8 Conexión a tierra de la fuente de alimentación eléctrica 49
2.6.1.8.1 Cableado de la conexión a tierra 49
2.6.2 Interfaz SERCOS 50
2.6.2.1 Dimensiones de la interfaz SERCOS 50
2.6.2.2 Cableado de la fibra óptica para la red SERCOS 51
2.6.3 Módulo EtherNet 51
2.6.3.1 Conexión de la red EtherNet/IP 51
2.6.4 Controlador CompactLogix 1768-L43 52
2.6.5 Módulos de E/S 53
2.9 Diseño del tablero a utilizar 60
2.9.1 Dimensiones del tablero 60
2.9.2 Arquitectura del tablero 61
2.9.3 Materiales para el ensamblado del tablero 63
Capítulo 3 Configuración de la estación principal 64
3.1 Introducción 65
3.2 Antes de configurar el controlador 65
3.2.1 Instalación del firmware del controlador 65
3.2.2. Descargar el firmware 65
3.2.3 Usando ControlFlash para instalar el firmware 65 3.2.4. Usando AutoFlash para instalar el firmware 66 3.2.5. Usando una tarjeta CompactFlash para instalar el firmware 66
3.3 Configuración del driver en serie 66
3.4 Configuración del controlador 68
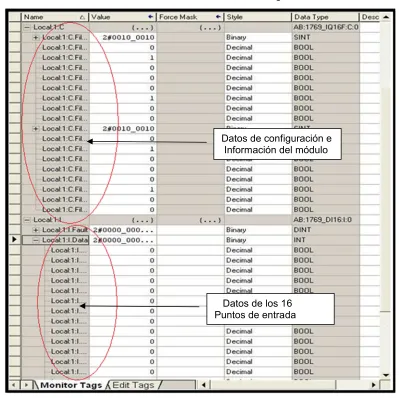
3.4.1 Configuración de E/S usando RSLogix 5000 68
3.4.2 Base de datos de tags del controlador 76
3.5 Configuración de la red DeviceNet 78
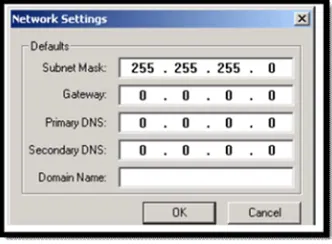
3.5.1 Establecimiento de la dirección IP para la computadora 78 3.5.2 Establecimiento de la dirección IP para la computadora 80
3.5.3 Asignación de las direcciones IP 81
3.5.4 Examinando la red EtherNet en el software RSLinx Classic 83 3.5.5 Configuración del módulo 1768-ENBT EtherNet 84
3.6 Configuración de red DeviceNet 85
3.6.1 Definiendo la dirección de nodo del escáner DeviceNet 85 3.6.2 Creando un archivo de configuración DeviceNet 86 3.6.3 Configuración del módulo 1769-SDN DeviceNet 88 3.6.4 Caso típico de la configuración de una subred DeviceNet 90 3.6.4.1 Creación de una lista de escán DeviceNet 93
Capítulo 4 Uso del software del analizador de movimiento 95
4.1 Introducción 96
4.2 Tipos de carga típicos 96
4.2.1 Definición de carga 96
4.2.2 Carga Lineal 96
4.2.3 Carga Rotatoria 97
4.3 Tipos de mecanismos 98
4.3.1 Definición de mecanismo 98
4.3.2 Banda transportadora 98
4.4 Tipos de Servomotores 100
4.4.1 Definición de servomotor 100
4.4.2 Motor simple 101
4.4.3 Motor con caja de engranes 101
4.5 Tipos de Servoaccionadores 102
4.5.1 Definición de servoaccionador 102
4.5.2 Kinetix 2000 102
4.5.3 Kinetix 6000 103
4.5.4 Ultra 3000 104
4.5.5 Ultra 5000 105
4.6 Perfil de movimiento 106
4.7 Creando una aplicación en el simulador de movimiento 107 4.7 Propuesta de la aplicación de control de movimiento 108 4.8 Aplicación características de control de movimiento 126 4.8.1 Solución propuesta para la aplicación de sincronización de ejes en
la máquina envolvedora
128
Capítulo 5 Análisis económico y conclusiones del proyecto 129
5.1 Introducción 130
5.2 Generalidades 130
5.3 Comparación técnica de equipos de control 131 5.4 Evaluación económica del equipo para el control de movimiento
con el fabricante Rockwell Automation
133
5.4.1 Costo del equipo para el Instituto Politécnico Nacional 133
5.4.2 Costo del equipo a precio de lista 139
5.5 Evaluación económica del equipo para control de movimiento con el fabricante Mitsubishi Automation, Inc.
145
5.6 Costo de la Ingeniería 148
5.7 Comparación económica del equipo de ambos fabricantes 149
5. 8 Aportaciones del tablero desarrollado 150
5.8.1 Plataforma del controlador 151
5.8.2 Integración de la etapa de control con el sistema de servoaccionamiento
152
5.8.3 Creación de una red EtherNet 154
5.8.4 Creación de una red DeviceNet con un solo nodo 156 5.8.5 Creación de una red DeviceNet con 4 nodos 157 5.8.6 Creación de una red DeviceNet Multimaestro 158
5.9 Conclusiones generales 159
Figura 1.0 Croquis de laboratorios pesados de ICA 2 Figura 1.1 Vista real de los laboratorios pesados de ICA 3 Figura 1.2 a) Diagrama general del módulo didáctico
b) Diagrama especifico del módulo didáctico
4 5 Figura 1.3 a) Imagen física de una embotelladora
b) Diagrama del control de movimiento de una embotelladora
9 9
Figura 1.4 a) Imagen física de una etiquetadora
b) Diagrama del control de movimiento de una etiquetadora
10 10
Figura 1.5 a) Imagen física del proceso de empaquetamiento horizontal
b) Diagrama de control de movimiento de un proceso de empaquetamiento horizontal
11
11
Figura 1.6 a) Imagen física de encajadora
b) Diagrama del control de movimiento una de encajadora
11 11
Figura 1.7 a) Imagen física de un paletizador
b) Diagrama del control de movimiento de un paletizador
12 12 Figura 2.0 Esquema general del control de movimiento 16 Figura 2.1 a) PLC 1768-L43 de Rockwell Automation para control
de movimiento
b) PLC Simotion D410 de Siemens para control de movimiento
22
22
Figura 2.2 Sistema de control distribuido 23
Figura 2.3 Sistema de control distribuido de Sepac Corp. 24 Figura 2.4 Arquitectura básica de un sistema de control 25 Figura 2.5 Arquitectura básica de los PLC´s 25
Figura 2.6 Entradas y salidas de un PLC 27
Figura 2.7 Pirámide jerárquica de las redes de comunicación 28 Figura 2.8 Estructura de una red industrial 30 Figura 2.9 Niveles de redes y su correspondiente protocolo de
comunicacion en base a empresas Americanas
31
Figura 2.10 Terminales de la fuente de alimentación eléctrica 40
Figura 2.11 Paquetes de Software 41
Figura 2.12 Ventanas del software RSLogix 5000 Enterprise Series 42
Figura 2.13 Ventanas del software RSLinx 43
Figura 2.14 Ventanas del Software RSNrtWorx 44
Figura 2.19 Fuente de alimentación eléctrica en el riel DIN 48 Figura 2.20 Terminales de la Fuente de alimentación eléctrica 48 Figura 2.21 Conexión de la fuente de alimentación eléctrica al
equipo de control
49
Figura 2.22 Conexión a tierra de la fuente de alimentación 49 Figura 2.23 Dimensiones de la interfaz SERCOS 50 Figura 2.24 Conexión del cable de la red EtherNet 52 Figura 2.25 Conexión de módulos de E/S adicionales 53 Figura 2.26 Conexión de las terminales de la red DeviceNet 54 Figura 2.27 Montaje del controlador 1868-L43 al riel DIN 54 Figura 2.28 Montaje del módulo EtherNet al riel DIN 55 Figura 2.29 Montaje del módulo SERCOS al riel DIN 55 Figura 2.30 Montaje de la fuente de alimentación al riel DIN 56 Figura 2.31 Montaje de los módulos de E/S al riel DIN 56 Figura 2.32 Montaje de la fuente de alimentación para el módulo
DeviceNet al riel DIN
57
Figura 2.33 Conexión del módulo DeviceNet a la fuente de alimentación DeviceNet
58
Figura 2.34 Montaje de la tapa de fijación final 59
Figura 2.35 Arquitectura del tablero 62
Figura 3.0 Selección del driver RS-232 DF1 67
Figura 3.1 Configuración del Drive 67
Figura 3.2 Verificando el estado Running 68
Figura 3.3 Observando el Driver seleccionado 68
Figura 3.4 Abriendo un nuevo proyecto 69
Figura 3.5 Seleccionando el controlador 69
Figura 3.6 Ventana principal del nuevo proyecto 69 Figura 3.7 Seleccionando módulo de Entrada y Salida 70 Figura 3.8 Nombrando al módulo de Entradas y Salidas Analógicas 70 Figura 3.9 Definiendo al módulo de Entradas y Salidas 71 Figura 3.10 Pestaña de Connection del nuevo módulo 71
Figura 3.11 Árbol de Entradas y Salidas 72
Figura 3.21 Módulo digital local combinado 78
Figura 3.22 Propiedades de My Network 79
Figura 3.23 Conexiones de área local 79
Figura 3.24 Propiedades del protocolo Internet 79 Figura 3.25 Asignando dirección IP y mascara de subred 76
Figura 3.26 Ejecutando instrucción cmd 80
Figura 3.27 Obteniendo dirección IP de la computadora 80 Figura 3.28 Seleccionando el Driver EtherNet 81
Figura 3.29 Verificando estado del Driver 81
Figura 3.30 Iniciando la utilidad BOOTP/DHCP 81
Figura 3.31 Pestaña Tools 82
Figura 3.32 Máscara de subred 82
Figura 3.33 Ingresando dirección IP 82
Figura 3.34 Deshabilitando BOOTP/DHCP 83
Figura 3.35 Dispositivos y Driver EtherNet 83
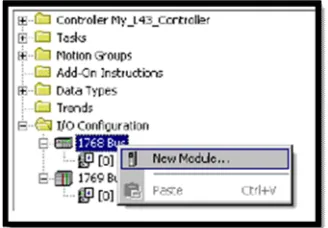
Figura 3.36 Agregando un nuevo módulo 84
Figura 3.37 Seleccionando el módulo de EtherNet 84
Figura 3.38 Configuración del nuevo módulo 85
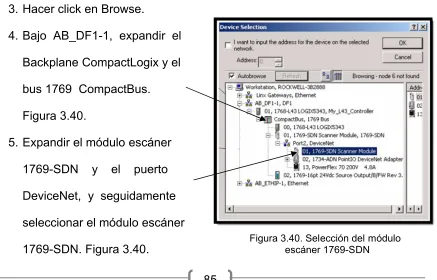
Figura 3.39 Inicialización de RSNetworx para DeviceNet 85 Figura 3.40 Selección del módulo escáner 1769-SDN 85
Figura 3.41 Configuración de Nodo 86
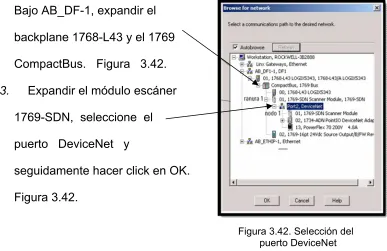
Figura 3.42 Selección del puerto DeviceNet 87
Figura 3.43 Propiedades de red DeviceNet 87
Figura 3.44 Módulo del escáner 1769-SDN 88
Figura 3.45 Módulo nuevo del 1769 Bus 89
Figura 3.46 Revisión del módulo SDN 89
Figura 3.47 Propiedades del nuevo módulo 1769-SDN 90 Figura 3.48 Verificando el estado del módulo 90 Figura 3.49 Verificando subred para DeviceNet 91
Figura 3.50 Examinando red DeviceNet 91
Figura 3.51 Propiedades del Scanner 1734-ADN 92
Figura 3.52 Abriendo DeviceNet.dnt 92
Figura 3.53 Propiedades del módulo 1769-SDN 93
Figura 3.54 Abriendo DeviceNet.dnt 93
Figura 4.0 Dispositivos eléctricos y neumáticos para carga linear del fabricante LEKU-ONA
97
Figura 4.1 Brazos robot tomado del fabricante KUKA 97 Figura 4.2 Partes de una banda transportadora 98 Figura 4.3 Tornillo sin fin y rueda helicoidal tomados del fabricante
SAYSA TMP
Figura 4.6 Aplicación de un motor simple tomado del fabricante Laminados San Félix
101
Figura 4.7 Relación de engranes 102
Figura 4.8 Kinetix 2000 tomado del fabricante Rockwell Automation 103 Figura 4.9 Kinetix 6000 tomado del fabricante Rockwell Automation 104 Figura 4.10 Ultra 3000 tomado del fabricante Rockwell Automation 105 Figura 4.11 Ultra 5000 tomado del fabricante Rockwell Automation 106 Figura 4.12 Perfil de movimiento para un elemento de control 107 Figura 4.13 Creando un nuevo proyecto en Motion Analyzer 107 Figura 4.14 Ventana principal del Motion Analyzer 108
Figura 4.15 Configuración del eje 1 109
Figura 4.16 Parámetros de movimiento del eje 1 110
Figura 4.17 Perfil de movimiento del eje 1 111
Figura 4.18 Parámetros del mecanismo del eje 1 112 Figura 4.19 Selección de parámetros del eje 1 113 Figura 4.20 Detalles de los componentes del eje 1 115
Figura 4.21 Configuración del eje 2 116
Figura 4.22 Parámetros del segmento 1 del eje 2 118 Figura 4.23 Parámetros del segmento 2 del eje 2 119 Figura 4.24 Parámetros del segmento 3 del eje 2 120 Figura 4.25 Parámetros del segmento 4 del eje 2 121
Figura 4.26 Perfil de movimiento del eje 2 122
Figura 4.27 Parámetros del mecanismo del eje 12 122 Figura 4.28 Etapas de transmisión del eje 2 123 Figura 4.29 Selección de parámetros del mecanismo del eje 2 124 Figura 4.30 Detalles de los componentes del eje 2 125 Figura 4.31 Diagrama básico de la máquina envolvedora de película
plástica
127
Figura 4.32 Diagrama de bloques de la solución propuesta 128 Figura 5.0 Plataforma del controlador CompactLogix 1768-L43 151 Figura 5.1 Dos Sistemas de control de movimiento general y un
sistema auxiliar
153
Figura 5.2 Modelo de red EtherNet 155
Tabla 2.1 Algunas características del protocolo EtherNet 32
Tabla 2.2 Selección de protocolo 36
Tabla 2.3 Determinación de la memoria del controlador 38
Tabla 2.4 Conexiones del conector 1769-SDN 57
Tabla 2.5 Conexiones de la fuente de alimentación DeviceNet al conector de salida
58
Tabla 2.6 Disipación del equipo a emplear 60
Tabla 5.1 Especificaciones de controladores 131 Tabla 5.2 Lista de materiales de la estación maestra de Rockwell
Automation
134
Tabla 5.3 Lista de materiales Kinetix 2000 de Rockwell Automation 135 Tabla 5.4 Lista de accesorios de Rockwell Automation 136 Tabla 5.5 Costo del equipo para el IPN de Rockwell Automation 139 Tabla 5.6 Lista de materiales de la estación maestra (precio lista de
Rockwell Automation)
139
Tabla 5.7 Lista de materiales Kinetix 2000 (precio lista de Rockwell Automation)
140
Tabla 5.8 Lista de accesorios (precio lista de Rockwell Automation) 142 Tabla 5.9 Costo total del equipo (precio lista) de Rockwell
Automation
144
Tabla 5.10 Lista de materiales del PLC modular de Mitsubishi Automation, Inc.
145
Tabla 5.11 Sistema de servoaccionadores de de Mitsubishi Automation, Inc.
146
Tabla 5.12 Sistema de comunicaciones de Mitsubishi Automation, Inc.
147
Tabla 5.13 Costo de los materiales de Mitsubishi Automation, Inc. 147
Tabla 5.14 Costo de la ingeniería 148
Índice de Ecuaciones
Página
TablasEcuación 2.1 Cálculo del área del tablero 60
Apéndice y anexos
Página
Apéndices y anexosApéndice A 162
Anexo A 165
En la actualidad el uso de servomotores y PLC’s es cada vez más usual en todo tipo de industria, como son la industria automotriz, textil, farmacéutica, tabacalera, alimenticia, metal-mecánica entre otras.
El proyecto de tesis tiene el propósito de analizar y seleccionar los elementos de un sistema de control para la integración de estos y proponer el diseño de un prototipo de control de movimiento (Motion Control), el cual podrá ser programado mediante una red de comunicación con una PC, y programar los perfiles de movimiento de tres servomotores, los cuales están encargados de suministrar la energía mecánica necesaria para la simulación de un proceso con un sistema mecánico.
El presente proyecto de tesis está enfocado a la integración del sistema de control para el control de motores electricos tipo servomotores principalmente, los cuales estarán manipulados y controlados directamente por un módulo de control empleando como elemento principal un PLC (Controlador Lógico Programable).
El módulo está constituido principalmente por un sistema de control, el cual está integrado por los siguientes elementos: módulo de entradas/salidas, red de comunicación, chasis, controlador, fuente de alimentación y el software correspondiente a cada etapa, así como los elementos de salida, que en este caso los servomotores.
partes principalmente, la primera es la parte del sistema de control y la segunda la parte de los servoaccionadores.
En el presente proyecto va enfocado al análisis y a la integración del equipo para el sistema de control, se hará un análisis y una comparación de dos de los principales fabricantes de sistemas de control para el control de movimiento.
Se sabe que en la actualidad existen gran variedad de dispositivos de control (PLC) que están fabricados para distintas actividades, el análisis que se que se llevara a cobo estará enfocado a estos dispositivos de este tipo que han sido desarrollados principalmente para el control de movimiento.
Cabe aclarar que actualmente en la industria o en cualquier proceso industrial existen gran variedad de motores eléctricos encargados de generar movimiento con la finalidad de transmitir este a algún otro dispositivo final de accionamiento, principalmente dividiéndose estos en el suministro de energía eléctrica que requieren, cabe mencionar que el sistema de control a analizar es capaz de controlar diferentes tipos de motores eléctricos, refiriéndonos a motores de C.A. y C.D. El presente trabajo se haría más extenso si se analizara la posibilidad de controlar diferentes tipos de motores eléctricos, es por esta razón y porque a lo largo de la carrera en diferentes asignaturas se ha visto en la necesidad de trabajar y generar proyectos con servomotores, se ha decidido enfocar el presente proyecto a la interacción con motores eléctricos de C.A. del tipo servomotor, sería bastante interesante desarrollar posteriormente algún otro proyecto para la manipulación de diferentes tipos de motores eléctricos, esto se facilitaría si se toma como referencia el presente trabajo, ya que este serviría de base principal para generar el control sobre los accionamientos.
día, es el poner en práctica los conocimientos teóricos adquiridos en las sesiones de clases. Por ello la importancia de diseñar un módulo didáctico para la aplicación de los conocimientos adquiridos.
Una de las causas por la cual el alumno pierde interés en los conocimientos prácticos de la carrera, es que no encuentran un espacio adecuado ni el equipo suficiente para poder observar el funcionamiento real de un sistema de control y automatización. Esto afecta de modo general de algunas materias que se imparten en la carrera de Ingeniería en Control y Automatización.
Se integrara un sistema de control para un prototipo el cual pretende ser ensamblado posteriormente, con este se podrán llevar a cabo prácticas de laboratorio aplicando los conocimientos teóricos, de esta manera se pretende que los alumnos incrementen los conocimientos de la aplicación de herramientas de control y automatización orientados al control de movimiento.
Cabe mencionar que el presente trabajo pertenece al proyecto de investigación, cuyo registro es 20082329 ante la SIP, mismo que está enfocado al autoequipamiento de los laboratorios pesados de la carrera de Ingeniería en Control y Automatización de la ESIME Zacatenco.
El presente proyecto de tesis tiene como objetivo principal la integración del sistema de control para control de movimiento, aquí se propondrá un diseño claro y eficaz para el posterior ensamblado de dicho módulo.
Una vez que llegue el equipo completo del fabricante Rockwell Automation que ha sido ya pedido a las instalaciones de la Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Zacatenco y además se cuente con los dispositivos misceláneos necesarios se podrá ahora si hacer el ensamblado completo así como pruebas de funcionamiento del dicho módulo. Lo anterior claro está, se podrá llevar a cabo exitosamente siguiendo los diagramas de diseño tanto físicos y eléctricos que se proponen en el presente trabajo.
Módulo: Un módulo es un componente autocontrolado de un sistema, el cual posee una interfaz bien definida hacia otros componentes; algo es modular si es construido de manera tal que se facilite su ensamblaje, acomodamiento flexible y reparación de sus componentes.[1]
Control: Es el proceso para determinar lo que se está llevando a cabo, valorizándolo y si es necesario, aplicando medidas correctivas de manera que la ejecución se desarrolle de acuerdo con lo planeado.[2]
Servomotor: Un servomotor (también llamado Servo) es un dispositivo similar a un motor de corriente continua, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable en dicha posición.[3]
Controlador Lógico Programable (PLC): EL PLC es un aparato
electrónico operado digitalmente que usa una memoria programable para el almacenamiento interno de instrucciones las cuales implementan funciones especificas tales como lógicas, secuénciales, temporización, conteo y aritméticas, para controlar a través de módulos de entrada /salida digitales y analógicas, varios tipos de máquinas o procesos. [4]
Mecanismo: Un mecanismo es un dispositivo que transforma un
movimiento y una fuerza de entrada en otra de salida.[5]
Movimiento: Es un fenómeno físico que se define como todo cambio de posición que experimentan los cuerpos de un sistema, o conjunto, en el espacio con respecto a ellos mismos o con arreglo a otro cuerpo que sirve de referencia.
[6]
Redes de comunicación: No son más que la posibilidad de compartir con carácter universal la información entre grupos de computadoras y sus usuarios; un componente vital de la era de la información. Una red es un número de computadoras, PLC´s u otros dispositivos conectados para compartir recursos. [8]
Accionamiento: Se denomina accionamiento al elemento o elementos de la máquina encargado de suministrar la energía mecánica necesaria para que la máquina funcione.[9]
INTRODUCCIÓN AL PROYECTO DE
INVESTIGACIÓN
Capítulo 1. Introducción al proyecto de investigación.
Capítulo 2. Diseño de una estación principal de trabajo para el control de movimiento.
Capítulo 3. Configuración de la estación principal.
Capítulo 4. Uso Software analizador de movimiento.
1.1 Introducción
En este capítulo se dará a conocer la ubicación geográfica donde se pretende implementar el proyecto de tesis, se planteará el problema y se darán a conocer la importancia del control de movimiento en estos tiempos.
1.2 Delimitación del lugar en donde se involucra el Proyecto
El proyecto de tesis se pretende implementar en los laboratorios pesados 1 de ICA, los cuales se encuentran ubicados dentro de la Unidad Profesional Adolfo López Mateos en la Escuela Superior de Ingeniería Mecánica y Eléctrica unidad Zacatenco. A continuación es posible apreciar la ubicación de los antes mencionados:
[image:22.612.97.538.323.601.2] Ubicación geográfica
Figura 1.0. Croquis Laboratorios Pesados de ICA
Vista real aérea
Fig. 1.1. Vista real de los laboratorios Pesados de ICA
1.3 Estudio del problema a resolver
La existencia de equipos didácticos de sistemas de control para realizar prácticas de laboratorio en la carrera de Ingeniería en Control y Automatización del Instituto Politécnico Nacional es muy poca o casi nula. Los jefes de la carrera de ICA se han visto en la necesidad de adquirir equipos usados de las empresas en la que algunos de los profesores de la carrera laboran, estos equipos normalmente son adquiridos en malas condiciones, algunos de ellos son acondicionados para emplearlos didácticamente, pero no todos cumplen con las características de un módulo didáctico.
propondrá un análisis de precios y calidad de los elementos y dispositivos que integran al módulo.
1.4 Solución propuesta
A continuación se propone el diseño de un módulo didáctico para atender la necesidad de contar con un equipo en el cual se puedan realizar prácticas de laboratorio de algunas asignaturas de la carrera de Ingeniería en Control y Automatización que están relacionadas con el control de accionamientos
La figura 1.2 muestra el diagrama general del prototipo que está integrado por los elementos de control del sistema así como de los servoaccionadores correspondientes para la manipulación de los elementos finales, los cuales estarán a cargo por servomotores, posteriormente en la figura 1.3 muestra un enfoque específico al cual está dedicado el presente proyecto, dicha etapa es la etapa de control del sistema general.
b) Diagrama específico Fig. 1.2. Módulo didáctico
1.5 Estado del arte [11]
Se tiene como objetivo realizar la integración de un sistema de control que sea la base principal para un sistema de control de movimiento, dicho tablero tiene como finalidad principal la enseñanza para alumnos y una mejor preparación técnica al término de la carrera de Ingeniería en Control y Automatización. Actualmente existen módulos didácticos en los laboratorios pesados de la ESIME Zacatenco, aunque son equipos viejos y obsoletos a nivel industrial algunos de ellos siguen siendo funcionales ya que se sigue trabajando con esos equipos en los laboratorios realizando prácticas. Por otro lado se sabe que en la actualidad el uso de la automatización industrial es cada vez más importante y necesaria en cualquier proceso industrial, esto conlleva a una mayor velocidad de producción, mayor eficiencia en los productos y por lo tanto conseguir una mejor grado de competencia, sea a nivel local, nacional o internacional.
maquinaria dentro de un sistemas de producción industrial, principalmente los elementos encargados de llevar a cabo las actividades de movimiento están a cargo de motores eléctricos, es por lo anterior que el presente trabajo tiene como finalidad una posible aplicación a nivel industrial de producción, cabe señalar que en el capítulo 4 se realiza una configuración con la ayuda de un software para hacer el análisis de una máquina envolvedora de plástico, aquí se introducen parámetros y se llega a un resultado para la posible implementación del análisis hecho en la máquina real. Enseguida se mencionará una breve descripción de los accionadores finales que se pretenden manipular en el presente trabajo, se mencionarán los tipos y algunas características de los servomotores.
Servomotor.
Un servomotor es un dispositivo que tiene un eje de rendimiento controlado. Este puede ser llevado a posiciones angulares específicas al enviar una señal codificada. Con tal de que una señal codificada exista en la línea de entrada, el servomotor mantendrá la posición angular del engranaje. Cuando la señal codificada cambia, la posición angular de los piñones cambia.
Hay tres tipos de servomotores:
Servomotores de corriente directa (CD).
Servomotores de corriente alterna (CA).
Servomotores de imanes permanentes (Brushless).
Servomotores de CD.
Los servomotores de CD son motores impulsados por una corriente que procede de amplificadores eléctricos de CD ó CA con demoduladores internos o externos, reactores saturables, tiratrones o amplificadores rectificadores controlados de silicio. Los servomotores de CD son de muchos tamaños, desde 0.05 hp hasta 1000 hp.
Que el par de salida del motor sea aproximadamente proporcional a su voltaje de control aplicado (desarrollado por el amplificador).
Que la dirección del par éste determinada por la polaridad instantánea del voltaje de control.
Se usan cuatro tipos de servomotores de CD, que son los más importantes, los cuales son:
a) Servomotor de CD de campo controlado
El par que produce este motor es cero cuando el amplificador de error de CD no le suministra excitación de campo. Como la corriente de armadura es
constante, el par varía directamente de acuerdo con el flujo del campo y también de acuerdo con la corriente de campo hasta la saturación.
b) Servomotor de CD de armadura controlada
Este servomotor emplea una excitación de campo de CD fija que suministra una fuente de corriente constante. Este tipo de control, posee determinadas ventajas dinámicas que no tienen el método de control de campo.
Un cambio súbito en el voltaje de armadura que ocasione una señal de error provocará una respuesta casi instantánea en el par debido a que el circuito de armadura es esencialmente resistivo en comparación con el circuito de campo altamente inductivo
c) Servomotor de CD de imán permanente de armadura controlada
d) Servomotores serie de CD de campo dividido
Los motores pequeños de potencia fraccionaria, de CD y campo dividido, se pueden hacer trabajar como motores con excitación separada y de campo controlado.
Servomotores de CA.
Junto con los motores de paso pequeños de CD, la mayor parte de los servomotores más pequeños de CA son del tipo de motor bifásico de inducción de polo sombreado.
Los voltajes mayores de señal de error producen pares correspondientemente mayores. Cuando se reduce en forma gradual el error, se reduce en forma correspondiente el voltaje de error para determinada carga, produciéndose una reducción tanto en velocidad como en par a medida que el motor se acerca a su posición nula.
Servomotores brushless de imán permanente
Un motor brushless de imán permanente es una máquina sincrónica con la frecuencia de alimentación, capaz de desarrollar altos torques (hasta 3 o 4 veces su torque nominal) en forma transitoria para oponerse a todo esfuerzo que trate de sacarla de sincronismo. La denominación brushless deviene del hecho de que no posee escobillas y es una forma de diferenciarlo de sus predecesores los servomotores a imán permanente alimentados con corriente continua.
La inercia de un servomotor brushless es sustancialmente menor. Ambas características: sobretorques importantes e inercias reducidas son características apreciadas y útiles para el control del movimiento pues permiten rápidas aceleraciones y deceleraciones así como control preciso de posición en altas velocidades. Por lo tanto este es el tipo de servomotor que se propone emplear para el desarrollo de este proyecto de investigación.
en el eje de rotación. La forma de los rotores a imanes varía de acuerdo al diseño y puede clasificarse en cilíndricos o de polos salientes.
La utilización de un dispositivo electrónico denominado servoaccionador para alimentar el estator con la tensión y frecuencia correcta, permite en cada instante, generar un campo magnético estatorico de magnitud y posición correctamente alineada con el campo magnético de rotor. De esta forma se obtiene el torque necesario para mantener la velocidad y posición deseada del eje del motor.
En las siguientes figuras, se muestran algunas aplicaciones típicas del control de movimiento donde seguramente se utilizan algún tipo de servomotor, las cuales fueron tomadas del fabricante Mitsubishi Automation Inc. El objetivo de mostrar estas aplicaciones, son para dar a entender la potencialidad que tiene el estudio del Control de Movimiento y la importancia que tiene en los procesos industriales.[11]
En la figura 1.3 (a) se muestra una embotelladora, y en la 1.3 (b) el esquema de control de movimiento.
La actividad para la cual está diseñada este tipo de máquina es para el llenado de sustancias líquidas que se encuentra en el tanque de almacenamiento por ejemplo, agua, refresco, aceites, vinos etc. Las botellas vacías (sean de vidrio, plástico o cualquier otro material) llegan a la máquina alineadas y listas para ser llenadas sobre una superficie móvil, la cual lleva por nombre banda transportadora, posteriormente se desplazan hacia otra máquina para sellado o tapado.
En la figura 1.4 (a) se muestra una etiquetadora,y en la 1.4 (b) el esquema de control de movimiento.
(a) Imagen física (b) Diagrama del control de movimiento Figura 1.4. Etiquetadora.
La actividad que realiza esta máquina es el colocar etiquetas las cuales son adheridas al recipiente del producto ya lleno, estas etiquetas pueden servir para el control de producción, especificaciones del producto o simplemente el logotipo de la marca.
(a) Imagen física (b) Diagrama del control de movimiento Figura 1.5. Proceso de empaquetamiento horizontal.
La actividad que realiza una máquina empaquetadora es colocar el envolvente al recipiente del producto que ya fue llenado, comúnmente este es plástico. Esta actividad es bastante importante cuando se trata de alimentos, ya que estos tienen que quedar perfectamente sellados para evitar su descomposición o derrame del mismo.
En la figura 1.6 (a) se muestra una encajadora, y en la 1.6 (b) el esquema de control de movimiento.
(a) Imagen física (b) Diagrama del control de movimiento Figura 1.6. Encajadora.
estas pueden ser de cartón o plástico en su caso. Esto se da gracias al movimiento que un cilindro realiza para desplazar al producto hacia el interior del recipiente.
En la figura 1.7 (a) se muestra un paletizador, y en la 1.7 (b) el esquema de control de movimiento.
(a) Imagen física (b) Diagrama del control de movimiento Figura 1.7. Proceso de paletizador.
La actividad designada para un paletizador es la de colocar y acomodar los recipientes que contienen al producto ya terminado, este almacenamiento es posible gracias mecanismos que permiten el desplazamiento de los contenedores.
DISEÑO DE UNA ESTACIÓN PRINCIPAL
DE TRABAJO PARA EL CONTROL DE
MOVIMIENTO
Capítulo 1. Introducción al proyecto de investigación.
Capítulo 2. Diseño de una estación principal de trabajo para el control de movimiento.
Capítulo 3. Configuración de la estación principal.
Capítulo 4. Uso Software analizador de movimiento.
2.1 Introducción
En este capítulo se mostraran algunos tipos de controladores de movimiento que existen, se conocerá el diseño esquemático del módulo de control de movimiento propuesto así también como se verá la integración de un sistema de control.
2.2 Control de Movimiento [12]
La sincronización entre ejes consiste en el movimiento de uno o más ejes (esclavos) en función del movimiento de otro (maestro).
Se suele llamar Control de Movimiento (Motion Control) al conjunto de aplicaciones cuyo funcionamiento se basa en la sincronización entre dos o más ejes. Entre estas aplicaciones destacan:
Gearbox o eje eléctrico: Seguimiento (en velocidad o en posición) de un accionamiento respecto a otro, con una determinada relación de reducción 1: X (gearbox) o sin ella (eje eléctrico). El resultado es equivalente a una transmisión mecánica entre ambos accionamientos, con lo que se ahorra su montaje, el cual a veces puede ser difícil o simplemente imposible (por ejemplo, accionamientos muy distantes entre sí, o con ubicaciones problemáticas). Además la relación de transmisión entre ejes puede ser alterada sin manipulaciones sobre la mecánica.
Manipulación al vuelo (corte, mecanizado, pintura, soldadura, etc.): Es decir, sin parar el transporte, por ejemplo, detener y arrancar continuamente una cinta transportadora suele ser fuente de problemas y representar pérdidas de tiempo de ciclo. Es mejor realizar las tareas necesarias sobre el producto en movimiento, sincronizando la posición de la estación manipuladora con el paso del producto.
es evidente, de ahí su nombre, y de hecho se suelen programar mediante la introducción de las coordenadas equivalentes en una leva mecánica.
2.3 Elementos del Control de Movimiento [13]
Un sistema de Control de Movimiento consiste de los siguientes componentes: el dispositivo mecánico que se está moviendo, el servomotor con retroalimentación y entradas/salidas (E/S) de movimiento, el servoaccionador, el controlador inteligente y el software de interfaz de programación y de operación. En la figura 2.0 se muestra un diagrama de bloques en donde se observan los componentes más importantes.
Figura 2.0. Esquema general del control de movimiento
2.3.1 Accionamientos
Denominamos accionamiento al conjunto de equipos electromecánicos y electrónicos responsables de poner en movimiento un eje a partir de la energía eléctrica.
Prácticamente todos los motores que permiten controlar sus variables básicas se encuadran dentro de alguna de las siguientes tecnologías:
Servomotores sin escobillas (brushless) o síncronos.
Motores de CA (corriente alterna) asíncronos.
Motores paso a paso, o steppers
Motores o servomotores de CD (corriente continua).
En el módulo didáctico que se está diseñando se empleará como
accionamiento a una tercia de servomotores del tipo brushless, baja inercia,
voltaje nominal 230 VCA, tamaño del marco (IEC 72-1) 63 mm (2.48 pulg),
velocidad nominal 8000 rpm, retroalimentación con encoder multi-vuelta de
alta resolución, gabinete IP66, conectores DIN Circular, ángulo derecho,
rotación 180°, sin freno.
2.3.2 Transmisión mecánica
Para el correcto funcionamiento de una máquina o sistema no basta con que los motores se muevan; hemos de transmitir este movimiento a los elementos que finalmente van a realizar el trabajo deseado. En concreto pueden necesitarse:
Unidades lineales, para transformar el movimiento rotativo del motor en desplazamiento lineal.
Acoplamientos, útiles para conectar y desconectar la transmisión de energía del motor al elemento.
Frenos y embragues de polvo magnético, para aplicaciones en que se deba controlar el par transmitido.
2.3.3 Medición e indicación de movimiento
Para controlar el movimiento no basta con accionar, también se necesita una realimentación de alguna de sus variables (normalmente posición o velocidad) hacia el elemento controlador para que éste pueda actuar en consecuencia.
En muchos casos, además, no sólo se debe medir la variable realimentada; también se debe indicar visiblemente de forma inteligible para el ojo humano. Los indicadores de posición satisfacen esta necesidad.
Este elemento típicamente está instalado dentro del servomotor y acoplado a su flecha. Tiene la tarea de "informarle" al controlador de movimiento la posición real de la flecha del motor en cada momento a bien, de "retroalimentar al sistema".
Normalmente se utiliza al resolver o al encoder (señal analógica y digital respectivamente) como elemento de retroalimentación. En el caso de los sistemas con motores sin escobillas y resolver; la señal analógica se envía al servo amplificador para realizar la conmutación electrónica de las bobinas del motor, esta señal de posición analógica se digitaliza en el servo amplificador y es enviada como señal de encoder al controlador de movimiento.
En el módulo didáctico que se está diseñando se empleará un encoder
para cada servomotor, estos contarán con una retroalimentación con
encoder multi-vuelta de alta resolución, gabinete IP66, conectores DIN
circular, ángulo derecho, rotación 180°.
2.3.4 Servoaccionador
Independientemente del tipo de tecnología que utilice (digital o analógica), el servoaccionador para motores sin escobillas es el encargado de realizar dos operaciones principales de gran importancia:
Conmutación electrónica: En base a la señal de retroalimentación recibida del sensor de posición, la cual le indica la posición real de los imanes del rotor del servo motor, realiza la conmutación de las bobinas del estator del motor con alta frecuencia y eficiencia, para lograr mantener perpendicular las fuerzas del imán permanente del rotor respecto a la fuerza producto del campo magnético de las bobinas del estator, con el objetivo de lograr la mayor repulsión posible y tener como resultado el mayor torque del motor en cualquier posición.
Además de estas dos funciones cuenta con protección para el servomotor y para el mismo, así como herramientas para el monitoreo de fallas de ambos.
En el módulo didáctico contará con un servoaccionador modelo
Kinetix 2000 del fabricante Rockwell Automation.
2.3.5 Controladores [14]
Desde el punto de vista de control del movimiento, entendemos por controladores aquellos equipos encargados de procesar información para convertirla en órdenes hacia la electrónica de potencia de los accionamientos. Por tanto son dispositivos basados en microprocesador o microcontrolador cuya misión principal es realizar cálculos de velocidades, trayectorias, etc., algunos de los cuales pueden llegar a ser muy sofisticados.
Para muchos "el cerebro del sistema"; se encarga de realizar el control de posición. El control de ésta variable lo realiza por medio de un algoritmo de control PID (con algunos filtros adicionales), el cuál debe ser sintonizado para el tipo de aplicación particular, con el fin, de mantener en todo momento el error de posición lo más cercano a cero posible.
recibida por el controlador y que servirá para calcular nuevamente el error en el siguiente periodo de actualización y corregirlo nuevamente.
Además de ésta función principal realiza otras como la coordinación de eventos externos por medio de entradas y salidas digitales y analógicas, la comunicación con el operador por medio de interfaces inteligentes o terminales, etc.
El principal elemento o cerebro de sistema con que contara el sistema
es el PLC CompactLogix 1768 con el procesador L43 del fabricante Rockwell
Automation.
2.3.6 Software de control de movimiento
Los controladores de movimiento regularmente vienen en conjunto con el software de programación y configuración, el cual debe incluir un amplio arreglo de herramientas para desarrollo de aplicaciones para Windows 2000/NT/XP/Me/9x.
El software debe ser una herramienta de desarrollo flexible y de fácil uso para la elaboración y construcción de prototipos en aplicaciones de movimiento, además debe proporcionar la habilidad de desarrollar rápidamente sistemas de control de movimiento. Sí el software es configurable, los dispositivos de adquisición de datos y visión deben integrarse fácilmente solamente con la ayuda de los tutoriales.
2.4 Tipos de Controladores de Movimiento [15]
subdividir la tarea de control del proceso o conjunto de máquinas en esas funciones autónomas, determinará en muchos casos la selección de un tipo u otro de control.
2.4.1 Sistema de control centralizado
Esta aproximación es la que se sigue en el caso de sistemas poco complejos donde un proceso puede ser gestionado directamente mediante un único elemento de control encargado de realizar todas las tareas del proceso de producción y que puede incluir un sistema de monitorización y supervisión. Conforme las necesidades de producción han requerido mayor complejidad, una tendencia ha sido la de emplear elementos de control más complejos y potentes, manteniendo en un único elemento de control todo el proceso, con la complejidad que ello supone ya que se hace necesario hacer llegar todas las señales de sensores y cablear todos los actuadores allá donde se encuentren. Como ventajas de esta metodología, no es necesario planificar un sistema de intercomunicaciones entre procesos ya que todas las señales están gestionadas por el mismo sistema, por otro lado, para sistemas poco complejos posee un menor coste económico, en cambio, posee numerosas desventajas ya que si el sistema falla, toda la instalación queda paralizada, siendo necesario un sistema redundante para evitar estas situaciones. También se hace necesario el empleo de unidades de control (generalmente PLC’s ) de mayor capacidad de proceso dada la complejidad de los problemas que debe abordar y con las restricciones de tiempo límite que son habituales en los procesos industriales debido a la sincronización necesaria; pueden existir problemas de tiempo de ciclo en el caso de procesos muy complejos. Por otro lado, el cableado puede aumentar notablemente debido a las mayores distancias que pueden existir entre los sensores, actuadores y la unidad de control, aunque este problema se puede simplificar en cierta medida debido al uso de buses de campo.
en lo que en la figura 2.1 (b) se tiene el modelo Simotion D410 del fabricante Siemens, ambos equipos están diseñados para el control de movimiento.
(a) Modelo 1768-L43 de Rockwell Automation (b) Modelo Simotion D410 de Siemens Figura 2.1. PLC´s para el control de movimiento
A algunos controladores compactos, también se les llama “Small Logic Controller” (SLC), mientras otros fabricantes les llaman, a sus productos, Autómata Programables; y existe una secundaria y amplia diversidad de nombres y familias con que cada uno de los fabricantes identifican sus productos como “Micro-PLC”, “PLC compacto”, “PLC integrado”, entre otros términos acuñados para el mercado.
2.4.2 Sistema de control distribuido
datos y estados; por tanto, el autómata o elemento de control evaluado debe permitir comunicaciones.
Con esta metodología de control es posible que cada unidad funcional consista en un proceso relativamente sencillo comparado con el proceso global, reduciendo la posibilidad de errores en la programación y permitiendo el empleo de unidades de control (PLC´s principalmente) más sencillas y por tanto, más económicas. Al mismo tiempo, la existencia de fallos en otras unidades de control no implica necesariamente la paralización de todos los procesos que se llevan a cabo en la planta. Como desventaja, es necesario realizar un estudio de implantación previo, ya que se debe identificar los procesos autónomos, asignar elementos a cada proceso y diseñar el modelo de intercomunicación para responder a las necesidades del proceso planteado. En la figura 2.2 es posible apreciarse a grandes rasgos como un sistema distribuido puede controlar de una manera óptima desde áreas diferentes interconectadas entre sí.
Figura 2.2. Sistema de control distribuido
se puede apreciar la imagen real de un sistema de control distribuido del fabricante Sepac Corp., el cual cuenta con la capacidad de control de movimiento.
Figura 2.3. Sistema de control distribuido del fabricante Sepac Corp. 2.4.3 Sistema de control híbrido
El control híbrido no está muy bien definido ya que este tipo de gestión de planta puede considerarse a cualquier estrategia de distribución de elementos de control a medio camino entre el control distribuido y el control centralizado. En numerosas ocasiones no resulta sencillo separar los procesos de manera completamente autónoma, por lo que se debe recurrir a la gestión de varios procesos desde una misma unidad de control pues la complejidad de la separación es mayor que la complejidad que supone su gestión conjunta.
2.5 Metodología para la integración de sistemas de control y
automatización
Con base a lo anterior se analizarán las partes que integran a un sistema de control, se sabe que este será el elemento principal o cerebro del sistema para el funcionamiento del módulo didáctico para control de movimiento.
En la figura 2.4 se muestran las partes que integran un sistema de control, estas son las entradas y salidas, el módulo de comunicación, el chasis (donde se ensamblan las demás partes), la fuente de alimentación, el software y el módulo de memoria.
Fig. 2.4. Arquitectura básica un sistema de control
A continuación se muestra en la figura 2.5 la arquitectura básica de un controlador lógico programable (PLC):
2.5.1 Selección de módulos de E/S [16]
a) Tipo de entradas. Es necesario determinar si las entradas que va a recibir el PLC son analógicas o digitales.
Analógicas. Son aquellas señales que varían de 4 a 20 mA ó de 0 a 5 Volts.
Digitales (CA o CD). Son aquellas que su estado es 1(uno) o 0 (cero).
En el presente proyecto se utilizara Módulo de 16 puntos de entrada
tipo Drenador/Fuente de 24 VCD. Dichas entradas tienes llagada a un PLC
modelo CompactLogix 1768-L43, del fabricante Rockwell Automation.
b) Tipo de salidas. Es necesario determinar si las salidas que va a proporcionar el PLC son analógicas o digitales.
Analógicas. Son aquellas señales que varían de 4 a 20 mA ó de 0 a 5 Volts.
Digitales. Son aquellas que su estado es 1(uno) o 0 (cero).
Las salidas digitales pueden ser de corriente alterna o corriente directa, por su construcción estas pueden ser de:
Transistor. Utilizadas en corriente directa.
Relevador. Utilizadas con corriente alterna o directa.
En el presente proyecto se utilizara Módulo de 16 puntos de salida tipo
Fuente de 24 VCD. Dichas salidas emergen de un PLC modelo CompactLogix
1768-L43, del fabricante Rockwell Automation.
Fig. 2.6. Entradas y salidas de un PLC
c) La capacidad de la memoria del procesador.Es importante conocer la complejidad de lo que se va a controlar con el PLC, ya que en función de este factor, se determinará la cantidad de bits que se requerirán, y por consiguiente la capacidad del PLC. La cantidad de entradas y salidas, no determina la capacidad de la memoria del PLC. Si se utilizan funciones matemáticas dentro del programa del PLC, se llevará más memoria.
2.5.2 Selección de comunicaciones de red [16]
Para entender lo que es una red de comunicación, primero se definirá lo que es una red, la cual es un número de computadoras, PLC´s u otros dispositivos conectados para compartir recursos.
Las redes de información se pueden clasificar según su extensión y su topología (forma en la cual las conexiones de una red son hechas). Una red puede empezar siendo pequeña para crecer junto con la organización o institución.
Fig. 2.7. Pirámide jerárquica de las redes de comunicación
a) Nivel de Campo o Dispositivo. También llamado nivel de instrumentación. Está formado por elementos de medida (sensores) y mando (actuadores) distribuidos en una línea de producción. Son los elementos más directamente relacionados con el proceso productivo ya que los actuadores son los encargados de ejecutar las órdenes de los elementos de control para modificar el proceso productivo (por ejemplo, un motor de mezclado, válvulas, taladros etc.) y los sensores miden las variables en el proceso de producción (por ejemplo, temperatura de cocción, nivel de líquidos, caudal, presión etc.)
En el presente proyecto se utilizará un módulo de la Interfaz SERCOS
para el CompactLogix 1768-L43.
Entre las aplicaciones de dicho módulo esta el control de movimiento, esta interfaz nos permite tener un control sobre los servomotores los cuales se encuentran a nivel de campo, refiriéndonos a la pirámide jerárquica de redes de comunicación.
Estos dispositivos permiten que los actuadores y sensores funcionen de forma conjunta para ser capaces de realizar el proceso industrial deseado. Son dispositivos programables, de tal modo que es posible ajustar y personalizar su funcionamiento según las necesidades de cada caso.
Un ejemplo de este tipo de sistemas sería un proceso de ensamblado de un volante dentro de un vehículo donde es necesario tener el coche bien situado, y entonces activar un brazo que inserta el volante sin tener en cuenta el resto de componentes o estado del vehículo, es decir realiza un proceso independiente y aislado.
c) Nivel de Supervisión o de Gestión. Todos los dispositivos de control existentes en la planta es posible monitorizarlos si existe un sistema de comunicación adecuado capaz de comunicar estos elementos con otro tipo de dispositivos no dedicados al control sino para la gestión y supervisión, y que habitualmente están constituidos por computadoras o sistemas de visualización tales como pantallas industriales. En este nivel es posible visualizar como se está llevando a cabo los procesos de planta, y a través de entornos SCADA (Supervisión, Control y Adquisición de Datos) poseer una “imagen virtual de la planta” de modo que esta se pueda recorrer de manera detallada, o bien mediante pantallas de resumen ser capaces de disponer de un “panel virtual” o computadoras donde se muestren las posibles alarmas, fallas o alteraciones en cualquiera de los procesos que se lleven a cabo. Mediante este tipo de acciones resulta inmediato disponer de acceso inmediato a cada uno de los sectores así como de los niveles inferiores de una o varias plantas.
Las comunicaciones de este ya no necesitan ser de tipo estrictamente industrial, es decir, muy robustas, de corto tiempo de acceso, etc. Sino que ahora los datos que se transmiten son informes que pueden tener un tamaño medio-grande, por lo que habitualmente se emplean redes de comunicación menos costosa como redes Ethernet que se adaptan mejor al tipo de datos que se desea transmitir y además permitir la comunicación eficaz entre las diferentes computadoras del mismo nivel de gestión (compras, departamento comercial, recursos humanos, dirección, diseño, etc.)
A continuación se muestra en la figura 2.8 algunas características de diferentes productos existentes en una industria:
Fig. 2.8. Estructura de una red industrial 2.5.3 Protocolos de comunicación [16]
En la figura 2.9 es posible apreciarse algunos dispositivos dentro de sus redes correspondientes, así también como los protocolos de comunicación usado normalmente en la actualidad por la mayoría de las industrias americanas en los sistemas de control y automatización:
Fig. 2.9. Niveles de redes y su correspondiente protocolo de comunicacion en base a empresas Americanas
A continuación se definirán los protocolos más usuales en la actualidad.
2.5.3.1 Protocolo Ethernet
El protocolo Ethernet Industrial (EtherNet/IP) es un estándar para la interconexión en redes industriales abiertas que admite tanto la transmisión de mensajes en tiempo real de E/S como el intercambio de mensajes. Su aparición se debió a la gran demanda de uso de las redes Ethernet para las aplicaciones de control. EtherNet/IP utiliza medios físicos y pastillas de comunicaciones comerciales. Puesto que se ha utilizado la tecnología Ethernet desde mediados de los setenta con una gran aceptación en todo el mundo, los productos de Ethernet sirven a una gran comunidad de suministradores.
2.5.3.1.1 Servicios de Ethernet
Programación, cargar y descargar programas sobre Ethernet desde una PC
Soporte para procesadores PLC-5E, SLC-5/05, y Gateway en Ethernet
Funcionalidad de “Who” sobre Ethernet para diagnóstico y detección de fallas.
2.5.3.1.2 Tecnologías Ethernet
En la tabla 2.1, se muestran las características típicas de una red Ethernet.
Tabla 2.1. Algunas características del protocolo Ethernet Velocidad de transmisión Tipo de cable Distancia máxima Topología
10 Mbps Coaxial 185 m Bus (Conector T)
10 Mbps Par Trenzado 100 m Estrella (Hub o Switch)
10 Mbps Fibra óptica 2000 m Estrella (Hub o Switch)
100 Mbps Par Trenzado (categoría
3UTP)
100 m Estrella. Half Duplex(hub) y
Full Duplex(switch)
100 Mbps Par Trenzado (categoría
5UTP)
100 m Estrella. Half Duplex(hub) y
Full Duplex(switch)
100 Mbps Fibra óptica 2000 m No permite el uso de hubs
1000 Mbps 4 pares trenzado (categoría
5UTP)
100 m Estrella. Full Duplex (switch)
1000 Mbps Fibra óptica (multimodo)
550 m Estrella. Full Duplex (switch)
1000 Mbps Fibra óptica (multimodo)
2.5.3.1.3 Direcciones IP
Entre los conceptos aportados por el protocolo IP están las denominadas direcciones IP, encargadas de identificar de manera única cada máquina o nodo dentro Internet. Las direcciones Internet son números de 32 bits, es decir, cubre desde 0 a 2^32, aunque en lugar de usarse un espacio de direcciones plano del tipo: 1, 2, 3,... se eligió establecer una estructura en las direcciones, de forma que una dirección IP consta de cuatro números separados por puntos. Como para la representación de cada número se han destinado ocho bits, estos pueden ir de 0 a 255, es la denominada notación numérica con puntos. Así, por ejemplo, la dirección Internet "195.76.188.1" se corresponde de forma única con un nodo dentro de la red, de forma que todo paquete que lleve este destino sólo acabará su viaje satisfactoriamente si llega a él.
Se utilizara una red EtherNet estándar para lograr una correcta
comunicación, sabemos que entre las múltiples funciones de esta red
industrial es capaz de permitir el monitoreo y control de movimiento.
2.5.3.2 Protocolo ControlNet
La red ControlNet es una red de control abierto y avanzado que satisface las demandas de las aplicaciones en tiempo real y altamente efectivas. La red ControlNet usa el protocolo de control industrial (CIP) probado para combinar la funcionalidad de una red de E/S y una red entre dispositivos similares, a la vez que proporciona un rendimiento de alta velocidad para ambas funciones.
Los principales beneficios que provee ControlNet son: Ancho de banda para entradas / salidas, enclavamientos de seguridad en tiempo real, mensajes peer to peer y programación, todo en el mismo enlace.
2.5.3.2.1 Beneficios de ControlNet
Alta velocidad (5Mbits/seg) en control de E/S
Opciones flexibles de instalación
Configuración del usuario simple
2.5.3.2.2 Dispositivos típicos en ControlNet
Controladores Típicos (PLC, SLC, etc.)
Interfaz Hombre Máquina
Interfaz de Operador
Control de Movimiento
Drives
Robots
Software
Válvulas neumáticas
Dispositivos de control de proceso
2.5.3.3 Protocolo DeviceNet
La red DeviceNet es una red abierta de nivel bajo que proporciona conexiones entre dispositivos industriales simples (por ejemplo, sensores inductivos, fotoeléctrico, fines de carrera, pulsadores, lectores de código de barra, indicadores luminosos, interfaz de operador, controladores de motores, detectores y accionadores) y dispositivos de nivel más alto (por ejemplo computadoras y controladores PLC). La red DeviceNet utiliza el protocolo de control industrial (CIP) probado para ofrecer control, configuración y recogida de datos para dispositivos industriales. La red DeviceNet es una red flexible que funciona con dispositivos de varios suministradores.
La conectividad directa provee una mejor comunicación entre los dispositivos, y un diagnóstico a nivel de dispositivo que sería imposible en el caso de interfaces entrada / salida cableadas.
2.5.3.3.1 Beneficios de DeviceNet
Reduce tiempos de arranque
Reduce tiempos muertos
Tecnología Producer/consumer
Tecnología abierta
Remover e insertar los módulos bajo alimentación de la red así como remplazo de dispositivos
Configuración de dispositivos en la red
2.5.3.3.2 Dispositivos típicos de DeviceNet
Dispositivos simples de E/S
Sensores actuadores y switches
Interfaz simple Hombre-Máquina
Push bottons
Micro Drivers
Robots
Software
Válvulas neumáticas
Se hará uso de la red DeviceNet para RS-232 serial interfaz, además
de que se necesitara un sensor fotoeléctrico para DeviceNet, sensor de proximidad inductivo para DeviceNet.
2.5.3.4 Determinación del protocolo adecuado
de servicios de comunicación. Las siguientes redes se recomiendan para los sistemas de control Logix.
Tabla 2.2. Selección de protocolo
Comparación EtherNet/IP ControlNet DeviceNet
Control de E/S Mejor Excelente Baja densidad
Configuración de dispositivos
Excelente Excelente Excelente
Recopilación de datos Excelente Mejor Buena
Enclavamiento de dispositivos similares
Mejor Excelente Buena
Dispositivos Mejor Mejor Excelente
Topologías Estrella
Requiere interruptores
Línea troncal/línea de derivación Estrella con
repetidores
Línea troncal/línea de derivación
Número máximo de nodos
Muchos nodos 99 nodos 63 nodos
Alto rendimiento Excelente Excelente Buena
2.5.3.5 Módulos especiales
velocidad, los módulos de salida para controlar motores a pasos, entre otros, los cuales hay que considerarlos cuando se tenga que seleccionar el chasis.
2.5.4 Selección de chasis [16]
También conocido como rack, en este se colocan el procesador y los módulos E/S, el tamaño del chasis lo define el número de ranuras y estas definen la cantidad de módulos que se pueden instalar en cada chasis.
El chasis de cada PLC se deberá escoger simplemente observando la cantidad y tipo de entradas y salidas que se tenga en el autónoma; con lo anterior se buscara el rack adecuado dependiendo de las especificaciones de cada proveedor.
El backplane proporciona una ruta de comunicación de alta velocidad entre los módulos. Múltiples módulos de controlador en el backplane pueden pasar mensajes entre sí. Con múltiples módulos de interfaz de comunicación en el backplane, un mensaje puede enviarse desde un vínculo a un puerto en un módulo, encaminarse mediante el backplane hacia el puerto de otro módulo y enviarse mediante otro vínculo a su destino final.
El controlador que ha sido seleccionado no requiere de un rack
especifico, simplemente este es montado en el panel riel DIN.
2.5.5 Selección de controladores [17]
Para la selección de controladores, se tienen que tomar en cuenta las siguientes características:
a) Un controlador con suficiente memoria.
b) Una tarjeta de memoria para cada controlador. c) Las baterías de repuesto.
capacidad de comunicarse con computadoras u otros procesadores a través de RS-232 y las redes DeviceNet, ControlNet y EtherNet/IP.
El controlador seleccionado para el proyecto es el modelo
CompactLogix 1768-L43 del fabricante Rockwell Automation.
Dicho controlador es compatible con un módulo de movimiento SERCOS interfaz y capaz de soportar hasta cuatro ejes físicos más dos ejes de movimiento para retroalimentación. CompactLogix es capaz de llevar a cabo aplicaciones de control de movimiento, del nivel de máquina, con potencia y capacidad de escalado sin precedentes.
2.5.5.1 Determinación de los requisitos de memoria del controlador
En la Tabla 2.3 se presentan las ecuaciones que proporcionan un cálculo aproximado de la memoria necesaria para un controlador. Estas cifras son cálculos aproximados en base al controlador 1768-L43 que ha seleccionado ya, teniendo como dato a tres de los cinco puntos se realizara el cálculo adecuado.
Tabla 2.3. Determinación de la memoria del controlador
Puntos de E/S digitales 2 * 400 = 800bytes
Puntos de E/S
analógicas
- * 2600 = 0bytes
Módulos de
comunicación
2 * 2000 = 4000bytes
Ejes de control de
movimiento*
3 * 8000 = 24000bytes
* Solo se tomará en cuenta cuando la aplicación corresponda a control de movimiento.
Por lo anterior y por las especificaciones requeridas del controlador
CompactLogix 1768-L43 usa una memoria de 2 Mbyte, dicha memoria será