Ecuaciones diferenciales lineales de
primer orden
2.1
Introducci´
on y definiciones
Definici´on 2.1. Una ecuaci´on diferencial lineal de primer orden, en forma impl´ıcita, es una ecuaci´on del tipo
(2.1) a0(t)x!(t) +a1(t)x(t) +a2(t) = 0,
donde las funciones a0, a1 ya2 son conocidas y est´an definidas en un intervalo I de R.
V´ease que (2.1) es una ecuaci´on del tipo F(t, x(t), x!(t)) = 0, que es la forma general de una ecuaci´on diferencial ordinaria (EDO) de primer orden impl´ıcita. La ecuaci´on diferencial
tx!(t)−x(t) + sent= 0
es un ejemplo de (2.1), en el que las tres funciones: a0, a1 ya2 est´an definidas en R.
Si la funci´on a0 no se anula en el intervalo I est´a claro que podremos despejar la primera
derivadax!(t) en (2.1) y escribir la ecuaci´on en la forma expl´ıcita o normalx!(t) =a(t)x(t) +b(t).
Definici´on 2.2. Una ecuaci´on diferencial lineal de primer orden, en forma expl´ıcita, es una ecuaci´on del tipo
(2.2) x!(t) =a(t)x(t) +b(t),
donde las funciones a y b son conocidas y est´an definidas en un intervalo I de R.
La ecuaci´on (2.2) es del tipo x!(t) = f(t, x(t)) (forma general de una EDO de primer orden expl´ıcita), donde f: I ×R → R,(t, x) $→ f(t, x) = a(t)x+b(t). De forma reducida (abreviada) escribiremos la ecuaci´on como x!=a(t)x+b(t). Tres ejemplos de (2.2) son
x! =tx+ 1, x! = 3tx−costt, x! = 1tx−logt.
En el primer ejemplo las funcionesaybest´an definidas enR, en el segundo, los intervalos maximales dondeaybest´an definidas sonI = (∞,0) eI = (0,∞) y, en el tercero, el intervalo maximal donde
aybest´an definidas esI = (0,∞).Obs´ervese que el ejemplo dado en el caso impl´ıcito no se podr´ıa escribir expl´ıcitamente en un intervalo que contenga a t = 0. Ahora bien, si ´unicamente estamos interesados en soluciones definidas en I = (0,∞), la ecuaci´on s´ı ser´ıa equivalente a la ecuaci´on expl´ıcita:
x!= 1tx− sentt.
La ecuaciones lineales en forma expl´ıcita son las que vamos a estudiar en este tema. A partir de ese estudio se podr´a, a veces, obtener conclusiones sobre ciertas ecuaciones impl´ıcitas (como la del ejemplo anterior).
Definici´on 2.3. Cuando en la ecuaci´on (2.2) la funci´onb es id´enticamente nula en el intervalo
I, se dice que la ecuaci´on diferencial lineal es homog´enea, pero cuando bno es la funci´on nula se dice que la ecuaci´on no es homog´enea o es completa.
Las ecuaciones lineales son muy ´utiles (poseen interesantes aplicaciones) y vienen a dar, como modelo matem´atico, una primera aproximaci´on de ciertos problemas reales (f´ısicos).
El estudio de estas ecuaciones es muy instructivo pues sirve de referencia para el estudio de ecuaciones lineales de orden superior y de sistemas diferenciales ordinarios de primer orden.
Sin m´as que suponer que las funciones aybson continuas en I, vamos a ver lo siguiente:
• Podremos resolver la ecuaci´on (2.2) en el sentido de que podremos dar una f´ormula, dependien-te de un par´ametroC, que nos proporcione las expresiones expl´ıcitas de todas las soluciones. En la pr´actica, el ´unico problema con el que nos podremos encontrar ser´a con el c´alculo de primitivas.
• Probaremos adem´as que todas las soluciones est´an definidas en el intervalo I donde a y b
son continuas. Esto es algo casi privativo de las lineales pues veremos que no sucede as´ı en la mayor´ıa de las ecuaciones diferenciales de primer orden (recu´erdese el caso x! = 2tx2, visto en el tema anterior).
• Por otra parte, podremos probar que cualquier problema de valor inicial (problema de Cauchy) asociado posee una ´unica soluci´on en el intervalo I (existencia y unicidad).
Obs´ervese que la ´unica suposici´on que hacemos: a, b ∈ C(I,R) implica que la funci´on de dos variables f:I ×R→R,(t, x)$→f(t, x) =a(t)x+b(t),escontinua en I×R.
A trav´es de este tema, veremos diversos motivos para llamar “lineales” a estas ecuaciones (con-sideraciones de tipo algebraicos), aunque, para ser m´as riguroso, las que verdaderamente deber´ıan llamarse lineales son las ecuaciones homog´eneas.
2.2
La ecuaci´
on diferencial lineal homog´
enea:
x
'(
t
) =
a
(
t
)
x
(
t
)
Una ventaja inicial que plantea una ecuaci´on diferencial lineal homog´enea respecto de una completa, es que la homog´enea siempre tiene una soluci´on trivial: la funci´on nulax(t) = 0, v´alida en cualquier intervalo I donde la funci´on a est´e definida; por ejemplo, la ecuaci´on x!(t) = (logt)x(t) tiene a la funci´on nula como soluci´on en el uintervalo I = (0,∞). Esto no sucede con la ecuaci´on no homog´enea. En esta secci´on supondremos ´unicamente que la funci´on a:I → Res continua en el intervalo I.
El caso visto en la introducci´on de la asignatura, el delmodelo malthusiano x!(t) =rx(t), donde
r ∈R, es un caso particular de ecuaci´on lineal homog´enea donde la funci´on aes constante y este caso nos debe servir de referencia. Vimos all´ı que todas las soluciones de la ecuaci´on, definidas en
R, son las funciones de la forma: xC(t) =Cert, donde C es cualquier n´umero real. Obs´ervese que la funci´on que aparece en la exponencial es una primitiva de la funci´on constantea(t) =r.
Al serauna funci´on continua enI posee primitivas en este intervalo. Notemos por!a(t)dtuna primitiva (enfatizamos que, en adelante, y en contra del uso tradicional, con el s´ımbolo anterior estamos notando una primitiva y no el conjunto de todas las primitivas de la funci´on a). Es evidente, por simple comprobaci´on, que para cada constanteC∈R, la funci´on definida por
xC(t) =Ce!a(t)dt
es soluci´on de la ecuaci´on lineal homog´enea (entre ellas est´a considerada la soluci´on nula para el caso C= 0), pues
x!C(t) =Ce!a(t)dt d dt(
!
a(t)dt) =e!a(t)dta(t) =a(t)x
C(t).
Veamos que las funciones anteriores son las ´unicas soluciones de la ecuaci´on homog´enea. Para esto procederemos como en el caso del modelo malthusiano. Supongamos que x: I → R es cualquier soluci´on y consideramos la funci´on derivable y:I →R,definida por
y(t) =x(t)e−!a(t)dt.
Sin m´as que derivar esta funci´on tenemos:
y!(t) =x!(t)e−!a(t)dt−x(t)a(t)e−!a(t)dt="x!(t)−a(t)x(t)#e−!a(t)dt = 0, para cadat∈I,
por lo que, al ser I un intervalo, la funci´on y es constante en I y as´ı existe C ∈ R tal que
x(t) =Ce !
a(t)dt
para cada t∈I. De esta forma hemos concluido el siguiente resultado:
Proposici´on 2.1. Si I es un intervalo en Ry a:I →R una funci´on continua enI, la ecuaci´on diferencial lineal homog´enea x!(t) =a(t)x(t) posee infinitas soluciones definidas en el intervaloI. Concretamente, si !a(t)dt es una primitiva de la funci´on a en I, las soluciones de la ecuaci´on son todas las funciones xC:I →R definidas por
(2.3) xC(t) =Ce!a(t)dt donde C∈R.
Por otra parte, obs´ervese que, si en lugar de tomar la primitiva t $→ !a(t)dt, tomamos otra, que ser´a de la forma: t $→ !a(t)dt+k, con k constante, el conjunto de funciones que aparecer´ıa en (2.3) ser´ıa el mismo.
En muchos textos (donde el rigor matem´atico brilla por su ausencia) llevan a cabo el siguiente procedimiento para resolver la ecuaci´on homog´enea:
x!(t) =a(t)x(t) =⇒
(1)
x!(t)
x(t) =a(t) =(2)⇒
$ x!(t)
x(t) dt=
$
a(t)dt+k =⇒
(3) log|x(t)|= $
a(t)dt+k
=⇒ |x(t)|=e!a(t)dt+k =⇒ x(t) =±eke!a(t)dt =Ce!a(t)dt.
El paso incorrecto es el (1) pues se est´a suponiendo que no hay un punto de I donde la soluci´on de la ecuaci´on se anula. Sabemos por la proposici´on anterior, que salvo la funci´on nula, esto es cierto, pero a priori no se puede suponer. De hecho, la constante C que sale al final del proceso anterior no es nula, por lo que la soluci´on nula ha sido excluida. La aparici´on de la constante k, que aparece en el paso (2), no queda muy clara aunque esto se podr´ıa solventar de otra forma. A veces, ni siquiera ponen valor absoluto dentro del logaritmo en el paso (3), lo que es un error pues s´olo tiene sentido logaritmos de n´umeros positivos. De todas formas, el proceso anterior no est´a mal tenerlo en cuenta como regla mnemot´ecnica por si se nos olvida la expresi´on (2.3).
Afrontamos ahora el estudio de un problema de valor inicial, tambi´en llamado problema de Cauchy:
(P) :
%
x!(t) =a(t)x(t)
x(t0) =x0 t0 ∈I, x0 ∈R, a:I →R continua enI,
es decir, estudiar cuantas soluciones x:I → R de la ecuaci´on diferencial, si existen, verifican la condici´on inicial x(t0) = x0 y, en tal caso, determinarlas. Para esto es conveniente, no elegir cualquier primitiva de la funci´on a, sino la primitiva definida por P(t) = !tt
0a(s)ds, que tiene
la particularidad de que verifica P(t0) = 0. Seg´un (2.3) las soluciones de la ecuaci´on diferencial
estar´ıan dadas por las funciones xC(t) = Ce
!t
t0a(s)ds, donde C ∈ R, pero obs´ervese que s´olo hay
una de ellas que verifica la condici´on inicial, que es la que corresponde a la constanteC =x0.De
esta forma concluimos el siguienteresultado de existencia y unicidad.
Proposici´on 2.2. Sean I un intervalo en R, t0 ∈I, x0 ∈R ya:I →R una funci´on continua en
I. El problema de valor inicial
(P) :
%
x!(t) =a(t)x(t)
x(t0) =x0
posee una ´unica soluci´on en el intervalo I, que es la funci´onx:I →R definida por
(2.4) x(t) =x0e
!t t0a(s)ds.
En la pr´actica, salvo en casos excepcionales, no es necesario recordar la expresi´on (2.4). Basta con recordar (es f´acil y de comprobaci´on inmediata) que la soluci´on general de la ecuaci´on es de la forma x(t) = Ce!a(t)dt y se determina la constante C imponiendo que se verifique la condici´on
x(t0) =x0.
Ejemplo 2.1. Soluciones de la ecuaci´on diferencial x!(t) =tx(t).
La ecuaci´on escrita en forma abreviada esx! =tx.
En este caso I =R y la funci´on a: R→ R, a(t) =t es continua en R. Por tanto, la ecuaci´on diferencial posee infinitas soluciones definidas enR.Para cadaC∈R tenemos la soluci´on definida por xC(t) =Ce!t dt, es decir, xC(t) =Cet
2
2 . Estas son las ´unicas soluciones.
Ejemplo 2.2. Soluci´on del problema de valor inicial (P) :
%
x!(t) +1tx(t) = 0
x(1) = 13
En este caso a(t) = −1t y el intervalo maximal I al que pertenecet0 = 1 y donde la funci´on a
est´a definida y es continua es I = (0,∞). Por tanto, el problema (P) tiene soluci´on y solamente una definida en ese intervalo. Para encontrar la soluci´on lo hacemos primeramente usando la f´ormula (2.4) y obtenemos que la soluci´on de (P) es la funci´on definida por
x(t) = 13e!1t−s1ds = 13e(−logt+log 1)= 13
t .
Si no queremos recordar la f´ormula (generalmente eso es lo m´as conveniente), determinamos todas las soluciones de la ecuaci´on diferencial definidas en el intervaloI = (0,∞),que son las funciones de la formax(t) =Ce!(−1/t)dt=e−logt= C
t y, ahora, basta con determinar la constanteCimponiendo
la condici´on x(1) = 13, de lo que resulta trivialmente C = 13. De cualquier forma se obtiene la soluci´on x(t) = 13/t.
Ejemplo 2.3. Soluci´on del problema de valor inicial (P) :
%
x!(t) =−1tx(t)
x(1) = 0
Planteamos la soluci´on de este problema con el ´unico objetivo de hacer ver que en este caso no es necesario hacer c´alculos ya que vemos quela funci´on nula es soluci´on y, teniendo en cuenta el resultado de la proposici´on 2.2, esta es la ´unica soluci´on. Esto mismo saldr´ıa de aplicar directamente la expresi´on (2.4).
Ejemplo 2.4. Soluci´on del problema de valor inicial (P) :
%
x!(t) =et2 x(t)
x(3) = 0
En este ejemplo, el ´unico objetivo es hacer ver que en este caso no podr´ıamos dar expl´ıcitamente las soluciones de la ecuaci´on diferencial por el problema de c´alculo que tenemos con la primitiva
!
2.3
La ecuaci´
on diferencial lineal no homog´
enea (completa)
Nos planteamos ahora el estudio de la ecuaci´on diferencial
x!(t) =a(t)x(t) +b(t).
Suponemos que las funciones ayb son conocidas y continuas en un intervalo I y que la funci´on b
no es la funci´on nula. Obs´ervese que ahora la funci´on nula x(t) = 0 no es soluci´on de la ecuaci´on. Vamos a dar aqu´ı dos m´etodos para su estudio. El primero es m´as elemental y m´as t´ecnico y es un adelanto de algo que veremos en el tema 5 sobreel m´etodo de los factores integrantes. El segundo m´etodo es m´as algebraico, m´as f´acil de recordar y llevar a la pr´actica, con la ventaja adicional de que posteriormente se generalizar´a a ecuaciones diferenciales lineales de orden superior y a sistemas diferenciales lineales. Este segundo m´etodo se basa fundamentalmente en el conocimiento que ya tenemos sobre la ecuaci´on homog´enea asociada. El primero tambi´en usa (en menor medida) lo ya visto para ecuaciones homog´eneas.
Aprovecharemos el primer m´etodo para estudiar un problema de valor inicial asociado a una ecuaci´on diferencial lineal completa.
2.3.1 Primer m´etodo: Uso de un “factor integrante”
En este m´etodo no exclu´ımos el caso en que b sea la funci´on nula, aunque este caso de lugar a una ecuaci´on homog´enea, ya estudiada. De hecho los resultados que obtendremos generalizar´an los vistos en la secci´on anterior.
En primer lugar sscribimos la ecuaci´on diferencial as´ı:
(2.5) x!(t)−a(t)x(t) =b(t).
Si µ es una funci´on definida en I tal que µ(t) )= 0 para cada t∈ I, la ecuaci´on anterior se puede escribir de forma equivalente como
(2.6) µ(t)[x!(t)−a(t)x(t)] =µ(t)b(t).
La idea es encontrar (veremos que existe) una funci´onµderivable (y que no se anule) enI tal que
(2.7) d
dt[µ(t)x(t)] =µ(t)[x
!(t)−a(t)x(t)] para cada t∈I y cada funci´onx,
pues, en tal caso, tendr´ıamos que la ecuaci´on (2.5) podr´ıamos escribirla de forma equivalente as´ı:
(2.8) d
dt[µ(t)x(t)] =µ(t)b(t).
La ventaja de (2.8) respecto de (2.5) es que de (2.8) es muy f´acil deducir la expresi´on de x. En efecto, (2.8) nos dice que la funci´on productoµxes una primitiva de la funci´onµben el intervaloI. Por tanto, si !µ(t)b(t)dt denota una primitiva de tal funci´on (la que sea), existir´a una constante
C tal que
µ(t)x(t) =
$
µ(t)b(t)dt+C
y, por tanto, cualquier soluci´onx de la ecuaci´on (2.5) ser´ıa de la forma:
(2.9) x(t) = 1
µ(t)
& $
(Obs´ervese que se necesita que seabcontinua enI para que tenga sentido la expresi´on!µ(t)b(t)dt). Rec´ıprocamente, si x es una funci´on definida por la expresi´on anterior, donde C ∈ R, entonces obviamente x es derivable y verifica la condici´on (2.8) y, por tanto, x ser´ıa soluci´on de (2.5). Es decir, que en tal caso, (2.9) nos dar´ıa la expresi´on de cualquier soluci´on de la ecuaci´on completa.
Veamos que efectivamente existe una funci´on µque no se anula y es derivable enI, que verifica la condici´on (2.7) y, al mismo tiempo, obtendremos una expresi´on deµ. Obs´ervese que
(2.7) ⇐⇒ µ!(t)x(t) +µ(t)x!(t) =µ(t)x!(t)−µ(t)a(t)x(t) ⇐⇒ µ!(t)x(t) =−µ(t)a(t)x(t),
por lo que ser´ıa suficiente con determinar una µque no se anule enI y verifique la condici´on
µ!(t) =−a(t)µ(t) para cada t∈I.
Lo anterior es una ecuaci´on diferencial lineal homog´enea en la funci´on inc´ognitaµ, cuyas soluciones vienen dadas porµ(t) =Ce−!a(t)dt, conCcualquiera en R. A nosotros nos basta con una soluci´on
que no se anule en I y est´a claro que una adecuada es la funci´on definida por µ(t) = e−!a(t)dt.
Usando estaµen la expresi´on obtenida en (2.9), concluimos que las soluciones de la ecuaci´on lineal completa son las funciones definidas por
(2.10) xC(t) =e!a(t)dt&C+
$
b(t)e−!a(t)dtdt'.
Cuando b es la funci´on nula en I, la expresi´on que se obtiene de (2.10) es la ya conocida para la soluci´on general de la ecuaci´on homog´enea. En conclusi´on, hemos obtenido el siguiente resultado:
Teorema 2.1. Si I es un intervalo en R y a, b:I → R son dos funciones continuas en I, la ecuaci´on diferencial lineal completa x!(t) =a(t)x(t) +b(t) posee infinitas soluciones definidas en el intervalo I. Las soluciones de la ecuaci´on son las funciones xC:I → R definidas por (2.10), donde C ∈R.
Una vez visto c´omo son todas las soluciones de la ecuaci´on diferencial, abordamos un problema de valor inicial
(P) :
%
x!(t) =a(t)x(t) +b(t)
x(t0) =x0
Suponemos l´ogicamente que el punto inicial t0 se encuentra en el intervalo I, donde las funciones
ay b son continuas. Buscamos, si es que existe, una soluci´on de la ecuaci´on diferencial lineal que verifica la condici´on inicial x(t0) =x0. En (2.10) tenemos las expresiones de todas las soluciones
de la ecuaci´on, pero en este caso, de la misma forma que vimos en el caso homog´eneo, no es conveniente tomar primitivas cualesquiera en tal expresi´on. Por ejemplo, para la funci´on a ser´ıa conveniente elegir la primitiva definida por P(t) = !tt
0a(s)ds, que tiene la particularidad de que
verifica P(t0) = 0. Esto mismo hacemos con el resto de las primitivas, es decir, tomar t0 como l´ımite inferior de cada integral que aparece en (2.10). De esta forma, el conjunto de soluciones de la ecuaci´on lineal podemos escribirlo as´ı:
(2.11) xC(t) =e
!t
t0a(s)ds&C+ $ t
t0
b(s)e−
!s
t0a(r)drds'.
Observemos, que la ventaja de la expresi´on (2.11) es que la evaluaci´on de xC en el punto t0 es trivial, concretamentexC(t0) =C. Esto nos confirma que existe una y solamente una soluci´on para
Teorema 2.2. Sean I un intervalo en R, t0 ∈I, x0 ∈Rya, b:I →Rdos funciones continuas en
I. El problema de valor inicial
(P) :
%
x!(t) =a(t)x(t) +b(t)
x(t0) =x0
posee una ´unica soluci´on en el intervalo I, que es la funci´on definida por
(2.12) x(t) =e
!t t0a(s)ds
&
x0 +
$ t
t0
b(s)e−
!s
t0a(r)drds
'
.
V´ease que la expresi´on obtenida para la soluci´on de (P) generaliza la obtenida en (2.4) para el caso homog´eneo. En la pr´actica no es aconsejable, salvo en casos excepcionales, usar las f´ormulas (2.10) y (2.12), pues la memorizaci´on de estas es dif´ıcil y es f´acil equivocarse. Para conseguir las soluciones de la completa, lo mejor es recordar el razonamiento seguido en la prueba del teorema 2.1 y para la resoluci´on de un problema de Cauchy, al igual que en el caso homog´eneo, en general aconsejo que se resuelva la ecuaci´on diferencial y despu´es se calcule el valor de la con-stante C que hace que se verifique la condici´on inicialx(t0) =x0. Ponemos en pr´actica estas ideas
en el siguiente ejemplo.
Ejemplo 2.5. Soluciones de la ecuaci´on diferencial: x!(t) = 2tx(t) +t y la soluci´on, definida
en R, del problema de valor inicial(P) :
%
x!(t) = 2tx(t) +t x(0) = 0
Observemos que las funciones dadas por a(t) = 2tyb(t) =test´an definidas y son continuas en
R. Por tanto, la ecuaci´on diferencial posee infinitas soluciones definidas en R, cuyas expresiones difieren en un par´ametro C ∈ R. Por otra parte, el teorema 2.2 nos asegura que el problema de Cauchy planteado posee una ´unica soluci´on definida enR.
Si µ es una funci´on definida en R tal que µ(t) )= 0 para cada t∈R, la ecuaci´on diferencial se puede escribir de forma equivalente como
µ(t)"x!(t)−2tx(t)#=tµ(t).
La idea es determinar una funci´on µ, derivable y que no se anule enR, que verifique
(2.13) d
dt[µ(t)x(t)] =µ(t)
"
x!(t)−2tx(t)#
para que nuestra ecuaci´on diferencial sea equivalente a la ecuaci´on
(2.14) d
dt[µ(t)x(t)] =tµ(t).
Derivando y desarollando la expresi´on (2.13) resulta
µ!(t)x(t) =−2tµ(t)x(t),
para lo cual ser´a suficiente con que µno se anule y sea soluci´on de la ecuaci´on lineal homog´enea
lo que nos lleva a elegir
µ(t) =e!−2t dt=e−t2.
Llevando esta expresi´on a la ecuaci´on (2.14) obtenemos
d dt[e
−t2
x(t)] =te−t2
y as´ıx debe verificar que existec∈Rtal que
e−t2x(t) =
$
te−t2 +C para cada t∈I
y, por tanto,
x(t) =et2
$
te−t2dt+Cet2 =et2"−12e−t2#+Cet2 para cada t∈I.
En definitiva, las soluciones de la ecuaci´on diferencial son las funcionesxC:R→Rdefinidas por
xC(t) =Cet2 −12 dondeC ∈R.
Se suele decir que x(t) = Cet2
− 12 es la soluci´on general de la ecuaci´on. Obs´ervese que, si en
lugar de la funci´on b(t) =t tuvi´esemos la funci´on nula, la ecuaci´on resultantex!(t) = 2tx(t) ser´ıa homog´enea y sus soluciones vendr´ıan dadas porxC(t) =Cet2
, expresi´on que ´unicamente difiere de la nuestra en el sumando−12.
Para determinar la soluci´on del problema (P) s´olo tenemos que calcular el ´unico valor de C
tal que xC(0) = 0, lo que nos lleva trivialmente al valor C = 1/2 y, as´ı, la soluci´on de (P) en el intervalo R es la funci´on definida por x(t) = 12(et2 −1) . Siempre es aconsejable comprobar los resultados obtenidos.
Observaci´on: De pedir directamente la soluci´on de (P) (sin pedir las dem´as soluciones de la ecuaci´on), lo conveniente es llevar a cabo el procedimiento anterior; es decir, determinar todas las soluciones de la ecuaci´on y, posteriormente, calcular la constante C imponiendo la condici´on inicial.
Una vez resuelta la ecuaci´on x! = 2tx+t se plantea otra muy parecida, aparentemente m´as f´acil que la anterior, pues cambiamos la funci´on b(t) = t por la funci´on constante b(t) = 1.
Ejemplo 2.6. Resolver la ecuaci´on diferencial: x!(t) = 2tx(t) + 1.
Vamos a ver que, a veces, las apariencias enga˜nan (y esto es algo que sucede con asiduidad con las ecuaciones diferenciales). De entrada tenemos asegurado que la ecuaci´on posee infinitas soluciones definidas en R, cuyas expresiones difieren en un par´ametro C∈R.En este caso, procediendo de la misma forma que en el ejemplo anterior escribimos
µ(t)"x!(t)−2tx(t)#=µ(t)
y necesitamos encontrar una funci´on µ, derivable y que no se anule, que verifique la misma condici´on (2.13) del ejemplo anterior
d
dt[µ(t)x(t)] =µ(t)
"
y, por tanto, µ(t) =e−t2
,pero, al llevar esta expresi´on a la ecuaci´on (equivalente a la inicial)
d
dt[µ(t)x(t)] =µ(t)
y al despejar x(t) nos encontramos con la desagradable sorpresa
(2.15) x(t) =et2
$
e−t2dt+Cet2,
es decir, con el c´alculo de una primitiva,!e−t2dt,que no se conoce. Este problema no se di´o en el caso anterior donde nos encontramos con la primitiva trivial !te−t2dt. En este caso, no hay m´as remedio que dejar la expresi´on de la soluci´on general como aparece en (2.15).
Obs´ervese el problema que ha surgido con unos coeficientes tan simples como a(t) = 2t y
b(t) = 1. Incluso en los casos en que las correspondientes primitivas pueden explicitarse, el trabajo de c´alculo puede ser bastante laborioso. Interesa entonces disponer de m´etodos alternativos que permitan, eventualmente, llegar a las soluciones por caminos m´as cortos, aunque eso no siempre ser´a posible.
2.3.2 Segundo m´etodo
Vamos a ver un segundo m´etodo de resoluci´on m´as f´acil de recordar en la pr´actica y generaliza-ble a ecuaciones lineales de orden superior y sistemas lineales de primer orden. Este m´etodo se basa fundamentalmente en el conocimiento de las soluciones de una ecuaci´on lineal homog´enea. Aunque no es estrictamente necesario, vamos a enfocarlo bajo ciertas consideraciones algebraicas, aprovechando que ya se conocen conceptos como espacios vectoriales, subespacios vectoriales y aplicaciones lineales. De hecho, estas consideraciones son las que realmente justifican que a tales ecuaciones diferenciales se les llamen lineales y, por otra parte, sus generalizaciones al caso de ecuaciones lineales de orden superior ser´an fundamentales en el estudio de ´estas.
Dada una ecuaci´on diferencial lineal de primer orden (E) : x!(t) =a(t)x(t) +b(t) diremos que (H) : x!(t) =a(t)x(t) es la ecuaci´on homog´enea asociada a la ecuaci´on (E). En lo que sigue en esta secci´on suponemos siempre queaybsoncontinuas en un intervaloI y, por tanto, las soluciones de ambas ecuaciones est´an definidas en el intervaloI.
Consideraciones algebraicas sobre la ecuaci´on homog´enea y la ecuaci´on completa.
La ecuaci´on homog´enea (H) tiene la siguiente propiedad, trivial pero importante, que no posee la ecuaci´on completa (E) ni otro tipo de ecuaci´on diferencial.
Proposici´on 2.3. Six ey son soluciones de la ecuaci´on homog´enea yα∈R, las funcionesx+y
y αx tambi´en son soluciones de la ecuaci´on homog´enea.
V´ease que lo afirmado en el resultado anterior no sucede con la simple ecuaci´on lineal no homog´enea: x! =x+ 1.
Observemos que las soluciones de la ecuaci´on (E) y las soluciones de la ecuaci´on (H) son funciones derivables en I que, adem´as, tienen derivadas continuas en I (ya que suponemos que
El conjunto de soluciones de la ecuaci´on (H) tiene la siguiente particularidad:
Proposici´on 2.4. El conjunto de soluciones de la ecuaci´on homog´enea es un subespacio vectorial de C1(I,R) de dimensi´on igual a 1.
Prueba. El que el conjunto de soluciones de (H) sea un subespacio vectorial de C1(I,R) se sigue inmediatamente del resultado de la proposici´on 2.3. El que este espacio sea unidimensional es consecuencia inmediata del resultado de la proposici´on 2.1, pues ´este nos confirma que el espacio de soluciones est´a generado por el elementox1, dondex1 es la funci´on definida porx1(t) =e!a(t)dt.
Observaci´on: La soluci´on nula (soluci´on trivial) de la ecuaci´on homog´enea es el elemento nulo del subespacio de soluciones.
En las ecuaciones diferenciales lineales de orden superior veremos que los conjuntos de soluciones de las ecuaciones homog´eneas asociadas tambi´en tienen estructuras de espacios vectoriales, de dimensi´on finita, donde la dimensi´on, en cada caso, coincide con el orden de la ecuaci´on diferencial.
Resulta ´util y c´omodo usar el siguiente operador (aplicaci´on)
L:C1(I,R)→ C(I,R), x$→Lx=x!−ax.
Es trivial comprobar queL eslineal. En efecto, six, y∈ C1(I,R), λ, µ∈R, se verifica:
L(λx+µy) = (λx+µy)!−a(λx+µy) =λx!+µy!−aλx−aµy
= λ(x!−ax) +µ(y!−ay) =λLx+µLy.
En t´erminos de este operador podemos escribir de una forma muy simple cu´ando una funci´on es soluci´on de (H) o de (E). Concretamente:
1. x es soluci´on de la homog´enea si, y s´olo si, Lx=θ, donde θ representa la funci´on nula (elemento nulo del espacio vectorial ). Dicho de otra forma, el conjunto de soluciones de la homog´enea es eln´ucleo del operador lineal L.
2. x es soluci´on de la ecuaci´on completa si, y s´olo si, Lx=b.
Teniendo en cuenta lo anterior y que L es lineal es muy f´acil comprobar el siguiente resultado, que es la clave de nuestro segundo m´etodo.
Proposici´on 2.5. Sixp es una soluci´on (particular) de la ecuaci´on completa (E), se verifica que
x es soluci´on de (E) si, y s´olo si, x es de la forma x=xh+xp , donde xh es soluci´on de la homog´enea (H).
Prueba. En efecto, six =xh+xp se tiene que Lx=Lxh+Lxp=θ+b=b y as´ıx es soluci´on de
(E). Rec´ıprocamente, si x es soluci´on de (E), podemos escribir x=xh+xp, dondexh=x−xp y
resulta quexh es soluci´on de (H) puesLxh=Lx−Lxp=b−b=θ.
Conclusi´on: Si conocemos las soluciones xh de la ecuaci´on homog´enea asociada y una soluci´on particular xp de la ecuaci´on completa, conocemos todas las soluciones de la completa. Este conjunto
de soluciones es
En el lenguaje del Algebra Lineal podemos decir queel espacio de soluciones de la ecuaci´on completa es un espacio af´ın asociado al espacio vectorial de las soluciones de la homog´enea.
Lo visto anteriormente se puede contrastar con lo que obtuvimos en el primer m´etodo. Vimos en el teorema 2.1 que las soluciones de la ecuaci´on completa son de la forma
x(t) =e!a(t)dt&C+
$
b(t)e−!a(t)dtdt',
lo que se puede escribir como
x(t) =Ce!a(t)dt + xp(t),
donde
(2.16) xp(t) =e
!
a(t)dt$ b(t)e−!a(t)dtdt.
Obs´ervese quexpes soluci´on de la completa (casoC = 0) yxh(t) =Ce
!
a(t)dt representa la soluci´on
general de la ecuaci´on homog´enea.
Ejemplo 2.7. Soluciones de la ecuaci´on diferencial x!(t) =x(t)−t+ 1.
Esta ecuaci´on posee infinitas soluciones definidas enR. Se ve a ojo una soluci´on particular de la completa, que esxp(t) =t, por lo que la resoluci´on de la ecuaci´on es casi inmediata. Las soluciones
de la ecuaci´on homog´enea asociadax!=xson las definidas porxC(t) =Cet, conC ∈R. Por tanto, las soluciones de ecuaci´on completa son las funciones de la forma xC(t) =Cet+t, dondeC ∈R.
2.3.3 M´etodos para determinar una soluci´on particular de la completa
En pocos casos se puede determinar a ojo una soluci´on particular por lo que se hace necesario un m´etodo general para conseguir esto. Por suerte, hay uno muy f´acil de recordar y de llevar a la pr´actica (salvo eventuales c´alculos de primitivas), que fue propuesto por el matem´atico J.L. Lagrange y se conoce de la siguiente forma:
A): Conjetura de Lagrange o m´etodo de variaci´on de las constantes (par´ametros).
Observemos que las soluciones de la ecuaci´on homog´enea asociada a una ecuaci´on completa son las definidas por xC(t) = Ce!a(t)dt, siendo C cualquier constante (real). Por tanto, es muy f´acil
acordarse del siguiente resultado, pues en ´el se conjetura que hay soluciones de la ecuaci´on completa que son como las anteriores pero cambiando la constante C por una funci´on t $→ k(t) derivable y con derivada continua (de ah´ı el discutido nombre del m´etodo de variaci´on de las constantes).
Proposici´on 2.6. Hay soluciones de la ecuaci´on completa x!(t) =a(t)x(t) +b(t) del tipo
(2.17) xp(t) =k(t)e
!
a(t)dt,
donde k∈ C1(I,R).
Prueba. Realmente la soluci´on particular (2.16), obtenida por el primer m´etodo, confirma esta con-jetura, ya que all´ı obtuvimos una soluci´on particular como la propuesta, dondek(t) =!b(t)e−!a(t)dt
primer m´etodo y vamos a llevar a cabo un simple razonamiento, que es el que hay que seguir en la pr´actica, para obtener la funci´on k sin necesidad de recordar f´ormulas. Consiste en suponer que, fijada una primitiva!a(t)dtde la funci´onaen el intervaloI, la funci´on dada por (2.17) es soluci´on de la ecuaci´on y llegar f´acilmente a una expresi´on de k(t).Finalmente la expresi´on que se obtiene de xp es la misma que en (2.16).
En efecto, si suponemos que la funci´on definida porxp(t) =k(t)e
!
a(t)dt, dondekes derivable, es
soluci´on de la ecuaci´on completa, derivando tal expresi´on e imponiendo que sea soluci´on, obtenemos:
x!p(t) =k!(t)e!a(t)dt+k(t)a(t)e!a(t)dt,
k!(t)e!a(t)dt+k(t)a(t)e!a(t)dt=a(t)k(t)e!a(t)dt+b(t)
y, por tanto,
k!(t)e!a(t)dt=b(t), es decir, k!(t) =b(t)e−!a(t)dt.
De esta forma, la obtenci´on de la funci´on kse reduce a un c´alculo de primitiva:
k(t) =!b(t)e−!a(t)dtdt.
(Obs´ervese que la funci´onkobtenida tiene derivada continua enI.) Una vez obtenida una de estas primitivas (la que sea) obtenemos la expresi´on de una soluci´on particular as´ı:
xp(t) =& !b(t)e−
!
a(t)dtdt'&e!a(t)dt',
que es exactamente, la misma expresi´on que se obtuvo en (2.16). Por tanto, de existir tal soluci´on particular debe tener la expresi´on descrita anteriormente. Ahora, lo ´unico que habr´ıa que hacer es derivar y comprobar que, efectivamente, la funci´on obtenida es soluci´on de la ecuaci´on diferencial, lo que nos podr´ıamos ahorrar por tenerlo asegurado por el primer m´etodo, pero la comprobaci´on es as´ı de simple
x!p(t) =b(t)e−!a(t)dte!a(t)dt+& !b(t)e−!a(t)dtdt'a(t)e!a(t)dt=b(t) +a(t)xp(t).
Ponemos en pr´actica el m´etodo anterior con cuatro ejemplos, donde cada uno de ellos presenta una peculiaridad distinta.
En el primer ejemplo resolvemos la misma ecuaci´on que se vio con el primer m´etodo para poder comparar ambos m´etodos.
Ejemplo 2.8. Soluciones de ecuaci´on diferencial x!(t) = 2tx(t) +t.
.
La ecuaci´on homog´enea (H) asociada a nuestra ecuaci´on completa esx! = 2tx, cuyas soluciones son las funciones, definidas en R, por xh(t) = Cet
2
, siendo C cualquier constante real. Seg´un la conjetura de Lagrange, hay soluciones particulares del tipo xp(t) = k(t)et
2
, donde k ∈ C1(R,R).
Para obtener una funci´on k adecuada procedemos como en la prueba del resultado anterior; es decir, imponemos que tal funci´on xp es soluci´on de la ecuaci´on diferencial completa y, si no nos
En efecto, derivando xp obtenemos: x!p(t) = k!(t)et
2
+ 2tk(t)et2
y ahora imponemos que sea soluci´on:
k!(t)et2 + 2tk(t)et2 = 2tk(t)et2 +t.
Por tanto, quedak!(t)et2 =ty, de esta forma, k!(t) =te−t2. Determinamosk mediante el c´alculo de la primitiva trivialk(t) =!te−t2 =−1
2e−t
2
.Llevando esta expresi´on de la funci´on k a la de xp,
se obtiene finalmente xp(t) =−1/2.
Las soluciones de la ecuaci´on completa son las funciones de la formax=xh+xp, dondexh son
las soluciones de la hom´enea (H) asociada. Por tanto, las soluciones de la ecuaci´on dada son las funcionesxC:R→Rdadas por las expresiones
xC(t) =Cet2 −1
2 dondeC∈R.
Obs´ervese que hemos tenido el mismo resultado que el que vimos con el primer m´etodo y las primitivas que han aparecido son las mismas que aparecieron all´ı. Sin embargo, esta forma de proceder es m´as f´acil de recordar.
Indicamos a continuaci´on la resoluci´on de la ecuaci´on diferencial usando el programa Mathe-matica. En principio vamos a indicar la entrada y salida con la versi´on 5.0 del programa y anteriores. En la primera l´ınea aparece lo forma en que se introduce la expresi´on de la ecuaci´on diferencial en este programa. En la segunda aparece la respuesta que da Mathematica.
DSolve[x’[t] == 2 t x[t] + t, x[t], t] {{x[t] -> -(1/2) + E^t^2 C[1]}}
La forma de introducir la ecuaci´on es bastante natural. Dentro del corchete donde act´ua la ins -trucci´onDSolveescribimos la ecuaci´on diferencial x’[t] == 2 t x[t] + t y despu´es, separados por comas, indicamos qui´en es la funci´on inc´ognita, en este caso x[t], y qui´en es la variable independiente, en este caso t. N´otese que usamos el doble igual == , que se usa en general para ecuaciones para distinguirlo del=de asignaciones. La soluci´on que da el programa tiene un aspecto algo raro: aparece C[1], que indica simplemente el par´ametro C de la soluci´on general (est´a pensado para que en ecuaciones de orden superior, donde aparecen varios par´ametros, aparezcan estos numerados). El s´ımbolo ^ se usa para las potencias y E indica la funci´on exponencial; as´ı E^t^2 indica et2.Algo m´as raro son las dos llaves que rodean la expresi´on de la soluci´on general. Esto tiene su explicaci´on, que no vamos a comentar aqu´ı.
En las versiones 6.0 y posteriores de este programa (actualmente tenemos la versi´on 8.0) las expresiones de las soluciones aparecen con mejores aspectos, an´alogos al que utilizamos en estos apuntes. As´ı, en nuestro ejemplo, una versi´on posterior a la 5.0 dar´ıa la soluci´on as´ı:
((
x[t]→ −1 2+e
t2 C[1]
))
.
Por otra parte, tenemos la posibilidad de introducir las expresiones de las ecuaciones mediante una paleta de caracteres, lo que nos facilita la tarea y, al mismo tiempo, en muchos casos, expresa la ecuaci´on de una forma m´as agradable.
En los pr´oximos ejemplos escribiremos los resultados que da Mathematica usando versiones posteriores a la 5.0.
Ejemplo 2.9. Estudiar y resolver el problema (P) :
%
x!(t) = cost−1tx(t)
x(π) = 1
En primer lugar, podemos afirmar que (P) tiene soluci´on ´unica en el intervalo I = (0,∞) ya que las funciones definidas por a(t) =−1/t yb(t) = cost son continuas en ese intervalo (el mayor intervalo donde a y b son continuas y que contiene al punto t = π). En segundo lugar, vamos a determinar todas las solucionesxc de la ecuaci´on diferencial definidas en el intervaloI = (0,∞) y,
por ´ultimo, determinamos la soluci´on de (P) buscando una constanteC para la que se verifica que
xc(π) = 1.
La ecuaci´on homog´enea asociada (H) es x! =−1tx,cuyas soluciones son las funciones definidas en el intervalo I = (0,∞) por xh(t) = Ce
!
−1
tdt =C/t, siendo C ∈ R. Por tanto, hay soluciones
particulares del tipo xp(t) = k(t)/t, donde k ∈ C
1
(I,R). Determinamos la funci´on k imponiendo quexp sea soluci´on de la ecuaci´on completa. Esto nos lleva a la igualdad
k!(t)
t − k(t)
t2 =−
k(t)
t2 + cost,
de donde se sigue que k!(t) = tcost. Llevando a cabo una integraci´on por partes, obtenemos
k(t) =!tcost dt=tsent+ cost y, finalmente,xp(t) = sent+costt.
Por tanto, las soluciones de la ecuaci´on diferencial son las funciones xC definidas en el intervalo
I = (0,∞) por
xC(t) = Ct + sent+costt, dondeC∈R.
Resoluci´on de la ecuaci´on diferencial con Mathematica:
DSolve[x’[t] == Cos[t] - (1/t) x[t], x[t], t]
**
x[t]→ C[1]t +Cos[t]+ttSin[t]++
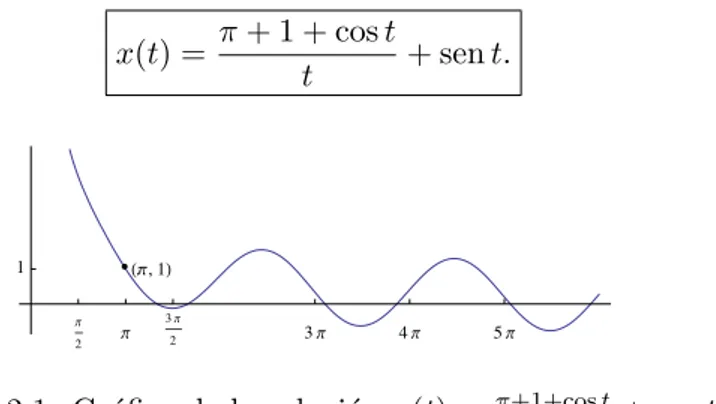
Determinamos la soluci´on del problema (P) entre las funciones anteriores sin m´as que imponer la condici´on inicial xC(π) = 1, lo que nos lleva a C = 1 +π. Por tanto, la soluci´on del problema (P) es la funci´on x: (0,∞)→Rdefinida por
x(t) = π+ 1 + cost
t + sent.
!!, 1"
Π
2 Π
3Π
2 3Π 4Π 5Π
1
Figura 2.1: Gr´afica de la soluci´onx(t) = π+1+cost t+ sent.
DSolve[{ x’[t] == Cos[t]-x[t]/t, x[Pi]==1}, x[t], t]
**
x[t]→ 1+π+Cos[tt]+tSin[t]++
En el siguiente ejemplo proponemos una EDO lineal de primer orden no expl´ıcita (impl´ıcita), muy especial, con el fin de hacer ver que los resultados vistos para las ecuaciones expl´ıcitas no son v´alidos para las impl´ıcitas. De paso veremos que cierto tipo de ecuaciones propiamente impl´ıcitas se pueden resolver usando ecuaciones expl´ıcitas.
Ejemplo 2.10. Soluciones de ecuaci´on diferencial tx!(t) + 2x(t)−4t2= 0 y soluciones de los problemas de Cauchy
(P) :
%
tx!(t) + 2x(t)−4t2 = 0
x(0) = 0 y (Q) :
%
tx!(t) + 2x(t)−4t2= 0
x(0) = 1
En principio tendr´ıa sentido que una soluci´on de esta ecuaci´on diferencial estuviese definida en un intervaloI tal que 0∈I, pero para poder estudiarla tenemos que escribir de forma equivalente esta ecuaci´on como una ecuaci´on expl´ıcita, en este caso:
x!(t) =−2tx(t) + 4t
y esto solo sucede si consideramos soluciones definidas en los intervalos I = (−∞,0) e I = (0,∞) (o intervalos contenidos en estos). Vamos a determinar las soluciones de la expl´ıcita por el segundo m´etodo para intentar, a partir de ´estas, estudiar lo que sucede con la impl´ıcita.
Las ecuaci´on homog´enea asociada es (H) : x! =−2tx,cuyas soluciones vienen definidas por
xh(t) =Ce
!
(−2/t)dt =Ce−2 log|t|= C
t2, dondeC∈R.
Existen soluciones particulares de la ecuaci´on completa de la forma xp(t) = kt(2t), siendok de clase
uno en I. Determinamos kimponiendo que xp sea soluci´on de la completa as´ı:
k!(t)
t2 −2
k(t)
t3 =−
2
t k(t)
t2 + 4t,
lo que nos lleva a k!(t) = 4t3 y, por tanto, k(t) = t4. Por tanto, una soluci´on particular de la completa es la dada por xp(t) = t2. Se concluye que las soluciones de la ecuaci´on diferencial
expl´ıcita son todas las funciones definidas en los intervalosI por
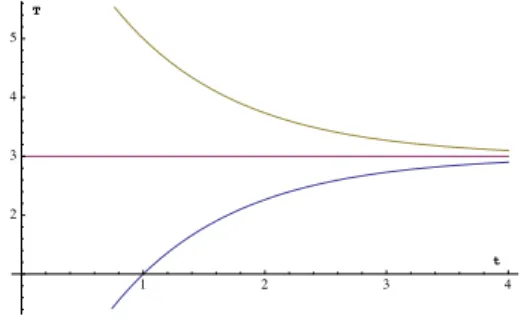
xC(t) =t2+ C
t2, donde C∈R.
Resoluci´on de la ecuaci´on diferencialx!=−2tx+ 4tconMathematica:
DSolve[x’[t] == -(2/t) x[t] + 4 t, x[t], t]
**
x[t]→t2+ Ct[1]2
++
En principio, las soluciones obtenidas son soluciones de la ecuaci´on diferencial impl´ıcita en los intervalos I = (−∞,0) e I = (0,∞). Curiosamente s´olo una de ´estas, concretamente la soluci´on particular x(t) = t2, tiene sentido como funci´on en todo R. Las otras, las definidas por xc(t) =
t2+C
t2,siendoC)= 0,no se pueden extender de forma continua a funciones definidas enRpues no
Si x:R→R fuese soluci´on de la ecuaci´on impl´ıcita, distinta dex(t) =t2, entonces x:I →R,
siendoI = (−∞,0) o I = (0,∞),ser´ıa soluci´on de la expl´ıcita y, por tanto, xvendr´ıa definida por
xc(t) =t2+tC2,parat)= 0.Pero esta situaci´on es imposible, puesx debe ser derivable y, por tanto,
continua en t= 0, lo cual no sucede pues x no posee l´ımite finito en ese punto. Un razonamiento an´alogo se puede usar para ver, que salvo la dada por x(t) =t2, no puede haber otra soluci´on de la ecuaci´on impl´ıcita definida en un intervaloI que contenga a t= 0.
Comprobamos que efectivamente la funci´on definida por x(t) =t2 es soluci´on de la impl´ıcita enRy el razonamiento anterior nos lleva a que es la ´unica soluci´on de la ecuaci´on impl´ıcita v´alida en R. Esto tiene como consecuencia que el problema de Cauchy (P) tendr´ıa soluci´on v´alida enR, que es la funci´on definida por x(t) =t2 (parece ser que es la ´unica) peroel problema (Q) no tiene soluci´on. Esto supone un comportamiento muy distinto al caso de ecuaciones expl´ıcitas pues v´ease que nuestra ecuaci´on lineal impl´ıcita es de la forma generala0(t)x!(t) +a1(t)x(t) +a2(t) = 0,donde las funcionesa0(t) =t, a1(t) = 2 y a3(t) =−4t2 est´an definidas y son continuas enR.
C ! 0
C ! 0
C " 0
C" 0
!0, 0"
!0, 1"
#4 #2 2 4
#20
#10 10 20 30 40
Figura 2.2: Gr´aficas de las solucionesxC para C= 1,3,0,−3,−1.
Si le damos a Mathematica la ecuaci´on lineal impl´ıcita nos da las mismas soluciones de la expl´ıcita asociada; es decir, las que hemos obtenido anteriormente:
DSolve[t x’[t] + 2 x[t] - 4 t^2 == 0, x[t], t] **x[t]→t2+C[1]
t2
++
y si le pedimos la soluci´on del problema (Q) no nos sabe responder.
Ejemplo 2.11. Soluciones de la ecuaci´on diferencial x!(t) + 5x(t) =t3et.
Escribimos la ecuaci´on comox!(t) =−5x(t)+t3et.En este caso una de las funciones coeficientes
es constante (a(t) =−5) y la otra es la definida porb(t) =t3et.Ambas son continuas enR y, por tanto, las soluciones de la ecuaci´on diferencial est´an definidas en R.
La ecuaci´on homog´enea (H) asociada a nuestra ecuaci´on completa es x! = −5x, cuyas solu-ciones son las funsolu-ciones definidas por xh(t) = Ce−5t, siendo C cualquier constante real. Seg´un la
conjetura de Lagrange, hay soluciones particulares del tipo xp(t) = k(t)e−5t, donde k ∈ C
1
(R,R).
Para obtener una funci´on k adecuada imponemos que tal funci´on xp sea soluci´on de la ecuaci´on
diferencial completa y obtenemos k!(t) = t3e6t. El problema con el que nos encontramos aqu´ı es
la determinaci´on de la primitiva k(t) =!t3e6tdt, lo cual exige tres integraciones por partes. En la primera integraci´on por partes tomamos u(t) = t3 y v!(t) = e6t y de forma an´alogav!(t) = e6t en las otras dos integraciones por partes. Con un poco de paciencia obtenemos:
!
t3
,-./ u(t)
e6t
,-./ v!(t)
dt = 16t3e6t−21!t2e6tdt= 16t3e6t−12016t2e6t−13!te6tdt1
= 16t3e6t−121t2e6t+16!te6tdt= 16t3e6t−121t2e6t+ 16016te6t−16!e6tdt1
= e6t216t3−121 t2+361t− 2161 3,
obteniendo finalmente la soluci´on particular
(2.18) xp(t) =et
& 1
6t3−121t2+ 361t−2161 '
= 2161 et(36t3−18t2+ 6t−1).
En definitiva, las soluciones de la ecuaci´on vienen dadas por
xC(t) =Ce−5t+2161 et(36t3−18t2+ 6t−1), dondeC ∈R.
A la vista de la dificultad de c´alculo que se ha tenido para obtener la soluci´on particular (2.18), nos planteamos si la resoluci´on de esta ecuaci´on es m´as c´omoda por el primer m´etodo (el del factor integrante). La respuesta es negativa, tanto en este ejemplo como en cualquier otro, si tenemos en cuenta la expresi´on (2.16); es decir, usando el primer m´etodo nos vamos a topar con las mismas primitivas y, por lo tanto, con la misma dificultad. Para ratificar esto (por si alguien no queda convencido), vamos a intentar resolver la ecuaci´on de este ejemplo con ese m´etodo y, de paso, vemos un ejemplo m´as.
Siµ:R→R no se anula en ning´un punto de R, la ecuaci´on diferencial es equivalente a
µ(t)"x!(t) + 5x(t)#=µ(t)t3et.
La idea es determinar una funci´on µ, derivable y que no se anule enR, que verifique
(*) d
dt[µ(t)x(t)] =µ(t)
"
x!(t) + 5x(t)#
para que nuestra ecuaci´on diferencial sea equivalente a la ecuaci´on
d
dt[µ(t)x(t)] =µ(t)t
de donde es trivial “despejar” x as´ı:
x(t) = 1
µ(t)
0
C+!µ(t)t3et1.
Derivando y desarollando la expresi´on (*) resulta
µ!(t)x(t) = 5µ(t)x(t),
para lo cual ser´a suficiente con que µno se anule y verifiqueµ!(t) = 5µ(t),lo que nos lleva a elegir
µ(t) =e5t,para finalmente obtener
x(t) =Ce, -. /−5t
xh(t)
+e−5t!t3e6tdt
, -. / xp(t)
.
Como era de esperar, en el primer sumando de la expresi´on anterior aparece xh(t), expresi´on de
la soluci´on general de la ecuaci´on homog´enea y, en el segundo, la misma soluci´on particularxp(t)
que surgi´o con el m´etodo de variaci´on de los par´ametros y, por tanto, con el mismo problema de c´alculo de la primitiva!t3e6tdt.
Resoluci´on de la ecuaci´on diferencial con Mathematica:
DSolve[x’[t] + 5 x[t] == t^3 Exp[t], x[t], t]]
44
x[t]→ 2161 et"−1 + 6t−18t2+ 36t3#+e−5tC[1]55
El ejemplo anterior es una buena excusa para explicar el siguiente m´etodo para determinar una soluci´on particular.
(B): M´etodo de los coeficientes indeterminados
Este es un m´etodo que se usa para determinar una soluci´on particular de una ecuaci´on lineal completa, pero que s´olo se puede aplicar en ciertos casos; concretamente, cuando la funci´on a es
constante, es decir, la ecuaci´on es de la forma
x!(t) =ax(t) +b(t)
y, adem´as, la funci´on b es de unos tipos especiales. Cuando este m´etodo se puede llevar a cabo, la ventaja que tiene respecto al anterior (m´etodo de Lagrange) es la simplicidad de c´alculos; de hecho, no requiere c´alculos de primitivas.
El m´etodo de los coeficientes indeterminados se desarrollar´a con todo detalle cuando veamos las EDO lineales de segundo orden; aqu´ı s´olo vamos a considerar, con poco formalismo, el caso especial en que la funci´on bes de la forma:
b(t) =Pm(t)eαt, dondePm(t) es un polinomio de gradom)= 0 en ty α∈R.
El ejemplo visto anteriormente es un caso particular de esta situaci´on. Al ser aconstante, como queremos una funci´onxp que verifiquex!p(t)−axp(t) =b(t),parece factible buscarxp as´ı:
xp(t) =Qm(t)eαt, dondeQm(t) es otro polinomio de grado m en t.
¿Es esto posible? En principio podr´ıa serlo si α)=aya que
y el factor que acompa˜na aeαt en la expresi´on anterior es un polinomio de grado m siempre que
α−a)= 0 (se puede probar que, en este caso, efectivamente existe tal soluci´on particular).
Ponemos en pr´actica esta idea con la ecuaci´on ya vista anteriormente: x!(t) + 5x(t) =t3et. Observemos que aqu´ıα= 1)=a=−5, por lo que puede existir una soluci´on particular de la forma
xp(t) =Q3(t)et= (At3+Bt2+Ct+D)et, dondeA, B, C, D∈R.
Veamos si existen coeficientes A, B, C, D que verifiquen que xp es realmente soluci´on y, en tal
caso, los determinaremos; de ah´ı que el m´etodo reciba el nombre de m´etodo de los coeficientes indeterminados.
La funci´on xp ser´a soluci´on de la ecuaci´on si y s´olo si, al imponer esa condici´on el sistema de
ecuaciones que resulta en las inc´ognitasA, B, C yDes compatible. De hecho, vamos a comprobar que al imponer que tal funci´on xp sea soluci´on llegamos a un sistema lineal de ecuaciones con
soluci´on ´unica y de resoluci´on inmediata, pues sale un sistema triangular donde se obtiene inmedia-tamente el coeficiente A; a partir del valor de A se obtiene el valor de B y as´ı sucesivamente. Finalmente veremos que sale la misma soluci´on particular que se obtuvo mediante el m´etodo de variaci´on de las constantes.
En efecto, derivando la expresi´on de xp y escribiendo adecuadamente x!p+ 5xp obtenemos
x!p(t) =&At3+ (3A+B)t2+ (2B+C)t+C+D'et
5xp(t) = &
5At3+ 5Bt2+ 5Ct+ 5D'et
x!p(t) + 5xp(t) = &
6At3+ (3A+ 6B)t2+ (2B+ 6C)t+C+ 6D'et.
Puesto que se debe verificar que x!p(t) + 5xp(t) =t3et para cada t∈R, resulta que, xp es soluci´on
de la ecuaci´on diferencial si y s´olo si, los coeficientes verifican
6A = 1
6B+ 3A = 0
6C+ 2B = 0
6D+C = 0.
Lo anterior es un sistema lineal de cuatro ecuaciones con cuatro inc´ognitas, compatible determinado y de resoluci´on trivial. De la primera ecuaci´on se obtieneA= 1/6. Llevando este valor a la segunda ecuaci´on se obtiene B = −1/12. Sustituyendo el valor de B en la tercera se tiene C = 1/36 y, por ´ultimo, de la cuarta ecuaci´on se sigue D = −1/216, obteniendo as´ı la misma soluci´on particular (2.18) que obtuvimos con el m´etodo de variaci´on de las constantes, pero de una forma m´as simple.
Obs´ervese que cuando α = 0 tenemos el caso particular en el que la funci´on b es polin´omica
y en este caso se busca una soluci´on particular que tambi´en sea polin´omica y del mismo grado (α =as´olo se dar´ıa en el caso en el que ecuaci´on fuese de la forma x!(t) =Pm(t), ecuaci´on que es
trivial). Se propone como ejercicio la resoluci´on de la ecuaci´on x!+x=t4 .Otro caso particular deb(t) =Pm(t)eαtesb(t) =λeαt(casom= 0), pero ´este no da problemas de c´alculo con el m´etodo
de Lagrange.
ecuaciones. Una de las propiedades m´as significativas de las ecuaciones linealesx! =a(t)x+b(t) es que poseen soluciones (infinitas) en cualquier intervaloI donde las funcionesaybsean continuas. Por otra parte, un problema de Cauchy posee soluci´on ´unica en un intervaloI donde las funciones
ayb sean continuas yt0 ∈I. As´ı por ejemplo, el problema lineal
(P) :
%
x!(t) =x(t)
x(0) = 1
posee soluci´on ´unica v´alida en todo R. Otra cuesti´on a destacar es que las expresiones de las soluciones se han obtenido de una forma expl´ıcita.
A partir de ahora, en el tratamiento del resto de las ecuaciones, a priori no podremos conocer los intervalos de existencia de la soluciones. Por ejemplo, un problema tan parecido a (P) como
%
x!(t) =x2(t)
x(0) = 1
no posee soluci´on v´alida en R. La soluci´on de este problema, que es x(t) = 1−1t,s´olo es v´alida en el intervalo I = (−∞,1). La ecuaci´on no es lineal; es de un tipo que estudiaremos en el pr´oximo tema. En muchas de las ecuaciones diferenciales, que trataremos en este curso, las expresiones de las soluciones se obtendr´an, en principio, de una forma impl´ıcita y, en muchos casos, no se podr´an obtener expresiones expl´ıcitas.
2.4
Algunos modelos matem´
aticos usando ecuaciones diferenciales
lineales de primer orden
Este tema se acaba con la exposici´on de algunos modelos matem´aticos en el que aparecen ecuaciones lineales de primer orden. Uno de ellos ya se vio en la introducci´on de la asignatura (tema 1), que es el
modelo de poblaci´on malthusiano, que dio lugar a una simple ecuaci´on diferencial lineal homog´enea:
x!(t) =rx(t). Exponemos a continuaci´on otros dos ejemplos muy interesantes.
2.4.1 La ley de desintegraci´on radioactiva
Hay ciertos ´atomos cuyos n´ucleos poseen un n´umero excesivo de neutrones y esto los hace inesta-bles. Los ´atomos tienden entonces a desintegrarse, liberando part´ıculas que les sobran y adquiriendo configuraciones m´as estables. Las sustancias con este tipo de ´atomos se llaman radioactivas (o ra-diactivas). Se suele suponer que todos los ´atomos de una sustancia radiactiva tienen la misma probabilidad de desintegrarse en la unidad de tiempo y que esa probabilidad no depende del mo-mento en que tiene lugar la desintegraci´on.
Experimentalmente se ha establecido quela velocidad de desintegraci´on de una sustancia radiac-tiva es directamente proporcional a la cantidad de sustancia existente. Esto se conoce comoley de desintegraci´on radioactiva y fue formulada por E. Rutherford y F. Soddy en 1902 (premios Nobel de qu´ımica en 1908 y 1921 respectivamente).
La ley de desintegraci´on anterior se puede expresar en t´erminos de una simpl´ısima ecuaci´on diferencial lineal homog´enea (an´aloga a la del modelo malthusiano). Si para cada instante de tiem-pot,x(t) denota la cantidad de materia radioactiva existente en ese instante, lo que nos dice la ley de desintegraci´on es que existe una constante K >0 tal que