ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
“DISEÑO DE CAJAS ACÚSTICAS”
T E S I S
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRONICA
PRESENTA:
ALEJANDRO ANGEL VELARDE VALENCIA
ASESORES:
ING. MIGUEL RAMÍREZ MONTIEL ING. MAXIMILIANO LÓPEZ DE ARRIAGA PÉREZ
G R A C I A S:
A Dios por concederme vida,
tiempo y pensamiento.
A mis padres y hermanos,
por su valioso ejemplo de vida,
por su guía y apoyo incondicional
en todas mis decisiones.
A quienes me han regalado
su amistad y compañía a lo largo de mi vida.
A todos mis maestros,
porque además de los conocimientos,
me han mostrado lo que es el amor por la docencia.
En especial a:
mis asesores.
Ing. Maximiliano López de Arriaga Pérez
Ing. Miguel Ramírez Montiel
mis sinodales.
Dra. Itzalá Rabadán Malda
Ing. Vidal Hinojosa Rodríguez
ÍNDICE
Página
1.- Objetivo 1
2.- Introducción 2
3.- Antecedentes 3
4.- Marco Teórico 5
4.1.- Movimiento Armónico Simple 5
4.2.- Superposición de Ondas 10
4.3.- Pulsaciones 14
4.4.- Oscilaciones 15
4.5.- Sonido 19
4.6.- Sistema Auditivo Humano 26
4.7.- Analogías Electroacústicas 35
4.8.- Transductores Electroacústicos 47
4.9.- Altavoces 56
4.10.- Filtros 62
5.- Diseño de Caja Acústica Personalizada
Tipo “Reflectorde Bajos” 71 5.1.- Parámetros Para el Diseño de
Cajas Acústicas Tipo “Reflector de Bajos” 71
5.2.- Planteamiento del problema 81
5.3.- Mediciones 81
5.4.- Cálculo de los Parámetros del Altavoz 90
5.5.- Geometría de la Caja 96
Página
6.- Conclusiones 100
Anexo1
Características Técnicas del Altavoz. 101 Anexo 2
Cajas Acústicas Cerradas y
Cajas Acústicas de Carga Simétrica 103
Anexo 3
Materiales de Construcción y
Materiales Absorbentes Para Cajas Acústicas 113
Glosario de Términos 120
1
1.- OBJETIVO.
Estructurar un sistema para el diseño y construcción de cajas acústicas, con énfasis en
2
2.- INTRODUCCIÓN.
El presente trabajo tiene su origen en la oportunidad de enseñar de forma didáctica, sistemática y científica, pero a la vez sencilla, la manera de diseñar y construir cajas acústicas diversas, pero con especial énfasis en las de tipo “Reflector de Bajos” por ser las más comunes y usadas en la actualidad, así como la teoría relacionada con ellas y por supuesto aquello que da razón de ser a las cajas acústicas, los altavoces.
Así pues, este documento se ha pensado para que sea de utilidad en la formación académica de jóvenes que cursen la educación media básica y media superior, y con su ayuda dar cumplimiento a algunos objetivos programáticos dentro de los planes vigentes.
3
3.- ANTECEDENTES.
Una caja acústica es un recinto de ingeniería, en el cual pueden ser montados los altavoces y “drivers”, además de redes de filtros y amplificadores. Dichas cajas pueden variar desde los diseños más simples (cajas rectangulares), hasta diseños complejos que incorporen altavoces internos, en cajas hechas de materiales compuestos, así como aislamientos acústicos especializados.
La función principal de las cajas acústicas es evitar que las ondas sonoras generadas en la parte trasera de los altavoces interactúen de manera negativa (corto circuito acústico) con el sonido deseable generado por el transductor acústico (altavoz), lo anterior debido a que ambos sonidos están fuera de fase entre sí, por lo que cualquier interacción entre ellos dentro del espacio de escucha crea una distorsión de la señal original, además de que como ambas señales sonoras llegan a la posición del oyente en tiempos ligeramente diferentes, pueden introducir ecos y efectos de reverberación que no forman parte del sonido primario. La caja, también desempeña un papel importante en el control y manejo de la vibración introducida por la carcasa del transductor, además de que el movimiento de la masa de aire dentro de la misma ayuda a la dispersión del calor generado por las bobinas de los altavoces y los amplificadores (sobre todo en cuanto a altavoces de bajas frecuencias se refiere “woofers” y “subwoofers”).
Antes de la década de 1950 los fabricantes no construían cajas acústicas totalmente cerradas; típicamente la parte trasera de la caja quedaba abierta. Esto se hizo por varias razones, sobre todo por la electrónica de aquel tiempo (el uso de tubos de vacío) que podía ser colocada dentro de la caja y enfriada por convección en el recinto abierto.
Desde el principio, se observó que la caja producía un fuerte efecto sobre la respuesta en graves de los altavoces. Puesto que el sonido se radia tanto hacia atrás, como hacia el frente del altavoz, se producirá ya sea una interferencia constructiva o destructiva alrededor de los parlantes que no cuentan con cajas acústicas, sobre todo para las bajas frecuencias, en relación directa con las dimensiones del altavoz. Lo anterior ocasiona la perdida de frecuencias bajas y lo que se conoce como efecto de filtro de peine (es decir, la generación de picos y valles de frecuencia, que son independientes de la señal que se desea reproducir). La mayoría de las cajas acústicas que se mencionan en este documento, fueron diseñadas para eliminar la diferencia de fase del sonido generada por la parte trasera del altavoz, o bien para modificarla de tal manera que sirva para reforzar el sonido producido por la parte delantera del altavoz.
4
recuperación que podría haber sido prevista en las frecuencias bajas por un recinto cerrado o de pequeñas dimensiones, pocos son los altavoces que pueden ser adecuados para este tipo de montaje.
Los sonidos generados hacia el frente y hacia atrás de un altavoz aparecen fuera de fase uno del otro porque se generan a través del movimiento opuesto del diafragma y porque viajan caminos diferentes, antes de converger en la posición del oyente. Un altavoz montado en un bafle finito mostrará un fenómeno físico conocido como interferencia, que puede resultar en una frecuencia de atenuación del sonido perceptible. Este fenómeno es particularmente notable en las frecuencias bajas, donde las longitudes de onda son lo suficientemente grandes para que la interferencia afecte a toda el área auditiva.
Debido a que las pantallas infinitas son poco prácticas y las finitas tienden a sufrir una respuesta pobre a longitudes de onda que se aproximan a las dimensiones del deflector (es decir, a bajas frecuencias), la mayoría de los gabinetes de altavoz utilizan algún tipo de estructura (generalmente una caja) para contener la energía de la fase inversa de sonido. La caja es normalmente hecha de madera, compuesto de madera, o, más recientemente, de plástico, por razones de facilidad de construcción y apariencia. La piedra, hormigón, yeso e incluso la construcción misma, también se han utilizado para este fin.
Las cajas acústicas pueden tener un efecto significativo más allá de lo que se desea, como resonancias del panel, la difracción de los bordes del gabinete y ondas estacionarias generadas en su interior, que son algunos de los posibles problemas. Las resonancias molestas pueden reducirse mediante el aumento de la masa del recinto o de su rigidez, por el aumento de la amortiguación de sus paredes o el de tratamiento de sus superficies, mediante la adición de refuerzos rígidos de la estructura, o mediante la adición de la absorción acústica interna. En algunos diseños, la reducción de la resonancia del panel se logra usando dos armarios de madera (uno dentro del otro) con el espacio entre ellos lleno de arena. Algunos aficionados, incluso han diseñado altavoces incorporados de hormigón, granito y otros materiales exóticos por razones similares.
5
4.- MARCO TEÓRICO.
4.1.- MOVIMIENTO ARMÓNICO SIMPLE.
Fig. 4.1.1 La pelota describe un movimiento armónico simple.
El movimiento armónico simple (se abrevia m.a.s.) es un movimiento periódico que queda descrito en función del tiempo por una función armónica (seno o coseno). Si la descripción de un movimiento requiriese más de una función armónica, en general sería un movimiento armónico, pero no un m.a.s..
En el caso de que la trayectoria sea rectilínea, la partícula que realiza un m.a.s. oscila alejándose y acercándose de un punto, situado en el centro de su trayectoria, de tal manera que su posición en función del tiempo con respecto a ese punto es una sinusoide. En este movimiento, la fuerza que actúa sobre la partícula es proporcional a su desplazamiento respecto a dicho punto y dirigida hacia éste.
Cinemática del movimiento armónico simple
El movimiento armónico simple es un movimiento periódico de vaivén, en el que un cuerpo oscila a un lado y a otro de su posición de equilibrio, en una dirección determinada, y en intervalos iguales de tiempo.
Por ejemplo, es el caso de un cuerpo colgado de un muelle oscilando arriba y abajo. El objeto oscila alrededor de la posición de equilibrio cuando se le separa de ella y se le deja en libertad. En este caso el cuerpo sube y baja.
6
de la cuerda, sino el movimiento individual de cada uno de los puntos que podemos definir en la cuerda. El movimiento de la cuerda, un movimiento ondulatorio, es el resultado del movimiento global y simultáneo de todos los puntos de la cuerda.
Fig 4.1.2 Posición (negro), velocidad (verde) y aceleración (rojo) de un oscilador armónico simple que se realiza continuamente.
Ecuación del movimiento
Elongación
En un movimiento armónico simple la magnitud de la fuerza ejercida sobre la partícula es directamente proporcional a su elongación, esto es la distancia a la que se encuentra ésta respecto a su posición de equilibrio. En un desplazamiento a lo largo del eje Ox, tomando el
origen O en la posición de equilibrio, esta fuerza es tal que donde es una constante positiva y es la elongación. El signo negativo indica que en todo momento la fuerza que actúa sobre la partícula está dirigida hacía la posición de equilibrio; esto es, en sentido contrario a su elongación (la "atrae" hacia la posición de equilibrio).
Aplicando la segunda ley de Newton, el movimiento armónico simple se define entonces en una dimensión mediante la ecuación diferencial
(4.1.1) Siendo la masa del cuerpo en desplazamiento. Escribiendo se obtiene la siguiente ecuación donde ω es la frecuencia angular del movimiento:
(4.1.2) La solución de la ecuación diferencial (4.1.2) puede escribirse en la forma
(4.1.3) donde:
es la elongación de la partícula.
es la amplitud del movimiento (elongación máxima). es la frecuencia angular
7
es la fase inicial e indica el estado de oscilación o vibración (o fase) en el instante
t = 0 de la partícula que oscila.
Además, la frecuencia de oscilación puede escribirse como
, (4.1.4) y por lo tanto el periodo como
(4.1.4b)
La velocidad y aceleración de la partícula pueden obtenerse derivando respecto del tiempo la expresión.
Velocidad
La velocidad se obtiene derivando la ecuación de la posición obtenida en el apartado anterior respecto al tiempo:
(4.1.5) Aceleración
La aceleración es la variación de la velocidad del movimiento respecto al tiempo y se obtiene por lo tanto derivando la ecuación de la velocidad respecto al tiempo:
(4.1.6) Amplitud y fase inicial
La amplitud A y la fase inicial se pueden calcular a partir de las condiciones iniciales del
movimiento, esto es de los valores de la elongación x0 y de la velocidad v0 iniciales.
(4.1.7) (4.1.8)
8
(4.1.9) Dividiendo miembro a miembro las dos ecuaciones (4b) y (4a) obtenemos
(4.1.10) Dinámica del movimiento armónico simple
En el movimiento armónico simple la fuerza que actúa sobre el móvil es directamente proporcional al desplazamiento respecto a su posición de equilibrio, donde la fuerza es nula. Esta fuerza va siempre dirigida hacia la posición de equilibrio y el móvil realiza un movimiento de vaivén alrededor de esa posición.
(4.1.11) Un ejemplo de m.a.s. sería el que realiza un objeto unido al extremo un muelle, en ese caso
k sería la constante de elasticidad del muelle.
Aplicando la segunda ley de newton tendríamos:
(4.1.12) Comparando esta ecuación y la que teníamos para la aceleración (4.1.6) se deduce:
(4.1.13) Esta ecuación nos permite expresar el periodo ( T ) del movimiento armónico simple en
función de la masa de la partícula y de la constante elástica de la fuerza que actúa sobre ella:
(4.1.14) Energía del movimiento armónico simple
9
Las fuerzas involucradas en un movimiento armónico simple son centrales y, por tanto, conservativas. En consecuencia, se puede definir un campo escalar llamado energía potencial (Ep) asociado a la fuerza. Para hallar la expresión de la energía potencial, basta
con integrar la expresión de la fuerza (esto es extensible a todas las fuerzas conservativas) y cambiarla de signo, obteniéndose:
(4.1.15)
La energía potencial alcanza su máximo en los extremos de la trayectoria y tiene valor nulo (cero) en el punto x = 0, es decir el punto de equilibrio.
La energía cinética cambiará a lo largo de las oscilaciones pues lo hace la velocidad:
(4.1.16)
La energía cinética es nula en -A o +A (v=0) y el valor máximo se alcanza en el punto de
equilibrio (máxima velocidad Aω).
(4.1.17) Como sólo actúan fuerzas conservativas, la energía mecánica (suma de la energía cinética y potencial) permanece constante.
(4.1.18)
Finalmente, al ser la energía mecánica constante, puede calcularse fácilmente considerando los casos en los que la velocidad de la partícula es nula y por lo tanto la energía potencial es máxima, es decir, en los puntos x= −A y x = A. Se obtiene entonces que,
(4.1.19)
O también cuando la velocidad de la partícula es máxima y la energía potencial nula, en el punto de equilibrio x = 0
10 4.2.- SUPERPOSICIÓN DE ONDAS
La forma de onda resultante de la superposición de ondas se obtiene sumando algebraicamente cada una de las ondas senoidales que componen ese movimiento complejo. Si se superponen ondas senoidales de igual frecuencia, aunque con eventuales distintas amplitudes y/o fases, se obtiene otra onda senoidal con la misma frecuencia, pero con distinta amplitud y fase. Eventualmente esas ondas pueden cancelarse, por ejemplo si tuvieran igual amplitud pero una diferencia de fase de 180º.
En algunos campos de la acústica puede resultar también interesante el caso de la superposición de ondas senoidales que se desarrollan sobre ejes perpendiculares. No se estudiaran aquí esos casos.
De particular interés resulta el caso de superposición de ondas senoidales de distinta frecuencia y eventual distinta amplitud y fase (por constituir el caso descrito por Fourier para la descomposición de los movimientos complejos).
Si bien la descomposición de todo movimiento complejo en una superposición de distintas proporciones de movimientos armónicos simples es estrictamente cierta para el caso de movimientos complejos periódicos, determinadas aproximaciones matemáticas permiten descomponer también todo movimiento no periódico en un conjunto de movimientos simples.
Si se superponen parciales no armónicos se obtiene una forma de onda no periódica, como la mostrada en la Figura 4.2.1.
11 La superposición de ondas senoidales cuyas frecuencias guarden una relación sencilla de números enteros (es decir, armónicos) resultará en un movimiento complejo periódico. Las próximas figuras muestran la resultante de la superposición de distintos armónicos de una serie.
La Figura 4.2.2 muestra la resultante de superponer el segundo y el tercer armónico de una serie, es decir dos sonidos separados por un intervalo de quinta.
Fig. 4.2.2 Resultante de la superposición del segundo y tercer armónico.
La Figura 4.2.3 muestra la resultante de la superposición del cuarto y quinto armónico de una serie, es decir sonidos separados por un intervalo de tercera mayor.
Fig. 4.2.3 Resultante de la superposición del cuarto y quinto armónico.
12 Fig. 4.2.4 Resultante de la superposición del primer y segundo armónico.
Fig. 4.2.5 Resultante de la superposición del primer y segundo armónico pero con diferentes amplitudes y ángulos de fase.
Nótese que la forma de onda resultante en todos estos casos varía en función de la amplitud y la fase de cada una de las ondas senoidales que se superponen. La Figura 4.2.5 muestra las resultantes de superponer octavas con distintas amplitudes y fases. Es notoria la diferencia de las formas de ondas resultantes.
Las Figuras 4.2.6 y 4.2.7 muestran cómo varía la resultante en función de variaciones en el ángulo de fase de las componentes del movimiento complejo. La única diferencia entre ambas figuras es el ángulo de fase del segundo y tercer armónicos. Mientras que en la Figura 4.2.6 todas las componentes tienen igual ángulo de fase, en la Figura 4.2.7 el segundo armónico tiene una diferencia de fase de 90º con respecto a la fundamental, mientras que la diferencia de fase del tercer armónico con la fundamental es de 180º. La forma de onda resultante de esencialmente distinta en uno y otro caso.
13 Fig. 4.2.6 Suma de los tres primeros armónicos con igual fase.
14
4.3.- PULSACIONES.
La superposición de ondas de frecuencias ƒ1 y ƒ2 muy cercanas entre sí produce un fenómeno particular denominado pulsación (o batido).
En esos casos nuestro sistema auditivo no es capaz de percibir separadamente las dos frecuencias presentes, sino que se percibe una frecuencia única promedio (ƒ1 + ƒ2) / 2, pero que cambia en amplitud a una frecuencia de ƒ2 - ƒ1 .
Es decir, si se superponen dos ondas senoidales de 300 Hz y 304 Hz, nuestro sistema auditivo percibirá un único sonido cuya altura corresponde a una onda de 302 Hz y cuya amplitud varía con una frecuencia de 4 Hz (es decir, cuatro veces por segundo).
Fig. 4.3.1 Pulsaciones producidas por la superposición de dos ondas de frecuencias muy cercanas.
15
4.4.- OSCILACIONES.
Oscilación libre
En el caso en que un sistema reciba una única fuerza y oscile libremente hasta detenerse por causa de la amortiguación, recibe el nombre de oscilación libre. Éste es por ejemplo el caso cuando se pulsa la cuerda de una guitarra.
Fig. 4.4.1 Oscilación libre. La envolvente dinámica muestra fases de ataque y caída.
Oscilación amortiguada
Si en el caso de una oscilación libre nada perturbara al sistema en oscilación, éste seguiría vibrando indefinidamente. En la naturaleza existe lo que se conoce como fuerza de fricción (o rozamiento), que es el producto del choque de las partículas (moléculas) y la consecuente transformación de determinadas cantidades de energía en calor. Ello resta cada vez más energía al movimiento (el sistema oscilando), produciendo finalmente que el movimiento se detenga. Esto es lo que se conoce como oscilación amortiguada.
16
En la oscilación amortiguada la amplitud de la misma varía en el tiempo (según una curva exponencial), haciéndose cada vez más pequeña hasta llegar a cero. Es decir, el sistema (la partícula, el péndulo, la cuerda de la guitarra) se detiene finalmente en su posición de reposo.
La representación matemática es:
, (4.4.1)
donde es el coeficiente de amortiguación. Notese que la amplitud es también una función del tiempo (es decir, varía con el tiempo), mientras que a y son constantes que dependen de las condiciones de inicio del movimiento.
No obstante, la frecuencia de oscilación del sistema (que depende de propiedades intrínsecas del sistema, es decir, es característica del sistema) no varía (se mantiene constante) a lo largo de todo el proceso. (Salvo que se estuviera ante una amortiguación muy grande.)
Oscilación autosostenida
Si se logra continuar introduciendo energía al sistema, reponiendo la que se pierde debido a la amortiguación, se logra lo que se llama una oscilación autosostenida. Éste es por ejemplo el caso cuando en un violín se frota la cuerda con el arco, o cuando se sopla sostenidamente una flauta.
Fig. 4.4.3 Oscilación auto sostenida. La envolvente dinámica presenta una fase casi estacionaria (FCE), además de las fases de ataque y caída
17
amplitud durante la fase casi estacionaria no es en rigor constante, sino que sufre pequeñas variaciones, cuya magnitud dependerá de la habilidad para compensar la energía perdida. Si la energía que se repone al sistema en oscilación es menor a la que se pierde producto de la fricción se obtiene una oscilación con amortiguación menor, cuyas características dependen de la relación existente entre la energía perdida y la que se continúa introduciendo. También en este caso el sistema termina por detenerse, aunque demore más tiempo. (En música se llamaría decrescendo.)
Por el contrario, si la energía que se introduce al sistema es mayor que la que se pierde por la acción de la fricción, la amplitud de la oscilación crece en dependencia de la relación existente entre la energía perdida y la que se continúa introduciendo. (En música se llamaría crescendo.)
Oscilación forzada
Las oscilaciones forzadas resultan de aplicar una fuerza periódica y de magnitud constante (llamada generador G) sobre un sistema oscilador (llamado resonador R). En esos casos puede hacerse que el sistema oscile en la frecuencia del generador (ƒg), y no en su frecuencia natural (ƒr). Es decir, la frecuencia de oscilación del sistema será igual a la frecuencia de la fuerza que se le aplica. Esto es lo que sucede por ejemplo en la guitarra, cuando se encuentra que hay cuerdas que no se pulsan pero que vibran "por simpatía". Debe tenerse en cuenta que no siempre que se aplica una fuerza periódica sobre un sistema se produce una oscilación forzada. La generación de una oscilación forzada dependerá de las características de amortiguación del sistema generador y de las del resonador, en particular su relación.
Resonancia
Si, en el caso de una oscilación forzada, la frecuencia del generador (ƒg) coincide con la frecuencia natural del resonador (ƒr), se dice que el sistema está en resonancia.
18
Por el contrario, en el caso en que la frecuencia del generador y la del resonador coincidieran (resonancia), una fuerza de pequeña magnitud aplicada por el generador G puede lograr grandes amplitudes de oscilación del sistema resonador R. La Figura 4.4.4 muestra la amplitud de oscilación del sistema resonador, para una magnitud constante de la fuerza periódica aplicada y en función de la relación entre la frecuencia del generador ƒg y la frecuencia del resonador ƒr.
Fig. 4.4.4 Curva de resonancia a = f (t) ƒg/ƒr = 1 => Resonancia.
En un caso extremo el sistema resonador puede llegar a romperse. Esto es lo que ocurre cuando un cantante rompe una copa de cristal emitiendo un sonido con la voz. La ruptura de la copa no ocurre solamente debido a la intensidad del sonido emitido, sino fundamentalmente debido a que el cantante emite un sonido que contiene una frecuencia igual a la frecuencia natural de la copa de cristal, haciéndola entrar en resonancia. Si las frecuencias no coincidieran, el cantante debería generar intensidades mucho mayores, y aún así sería dudoso que lograra romper la copa.
19 4.5.- SONIDO.
El sonido, en física, es cualquier fenómeno que involucre la propagación en forma de ondas elásticas (sean audibles o no), generalmente a través de un fluido (u otro medio elástico) que esté generando el movimiento vibratorio de un cuerpo.
El sonido humanamente audible se genera por ondas sonoras consistentes en oscilaciones de la presión del aire, que son convertidas en ondas mecánicas en el oído humano y percibidas por el cerebro. La propagación del sonido es similar en los fluidos, donde el sonido toma la forma de fluctuaciones de presión. En los cuerpos sólidos la propagación del sonido involucra variaciones del estado tensional del medio.
Fig. 4.5.1 Representación esquemática del oído. (Azul: ondas sonoras. Rojo: tímpano. Amarillo: Cóclea. Verde: células de receptores auditivos. Púrpura: espectro de frecuencia de respuesta de lo oído. Naranja: impulso del nervio.)
La propagación del sonido involucra transporte de energía sin transporte de materia, en forma de ondas mecánicas que se propagan a través de la materia sólida, líquida o gaseosa. Como las vibraciones se producen en la misma dirección en la que se propaga el sonido, se trata de una onda longitudinal.
Física del sonido
La física del sonido es estudiada por la acústica, que trata tanto de la propagación de las ondas sonoras en los diferentes tipos de medios continuos como la interacción de estas ondas sonoras con los cuerpos físicos.
Fig. 4.5.2 Onda sinusoidal; Variación de frecuencia; Abajo podemos ver las frecuencias más altas. El eje horizontal representa el tiempo.
20 Propagación del sonido
Ciertas características de los fluidos y de los sólidos influyen en la onda de sonido. Es por eso que el sonido se propaga en los sólidos y en los líquidos con mayor rapidez que en los gases. En general cuanto mayor sea la compresibilidad (1/K) del medio tanto menor es la
velocidad del sonido. También la densidad es un factor importante en la velocidad de propagación, en general a mayor sea la densidad (ρ), a igualdad de todo lo demás, tanto menor es la velocidad de la propagación del sonido. La velocidad del sonido se relaciona con esas magnitudes mediante:
(4.5.1)
En los gases, la temperatura influye tanto la compresibilidad como la densidad, de tal manera que el factor de importancia suele ser la temperatura misma.
Para que el sonido se transmita se necesita que las moléculas vibren en torno a sus posiciones de equilibrio.
En algunas zonas de las moléculas de aire, al vibrar se juntan (zonas de compresión) y en otras zonas se alejan (zonas de rarefacción), esta alteración de las moléculas de aire es lo que produce el sonido.
Magnitudes físicas del sonido
Como todo movimiento ondulatorio, el sonido puede representarse como una suma de curvas sinusoides con un factor de amplitud, que se pueden caracterizar por las mismas magnitudes y unidades de medida que a cualquier onda de frecuencia bien definida: Longitud de onda ( λ ), frecuencia ( f ) o inversa del período ( T ), amplitud (que indica la
cantidad de energía que contiene una señal sonora) y no hay que confundir amplitud con volumen o potencia acústica. Y finalmente cuando se considera la superposición de diferentes ondas es importante la fase que representa el retardo relativo en la posición de una onda con respecto a otra.
Sin embargo, un sonido complejo cualquiera no está caracterizado por los parámetros anteriores, ya que en general un sonido cualquiera es una combinación de ondas sonoras que difieren en los cinco parámetros anteriores. La caracterización de un sonido arbitrariamente complejo implica analizar tanto la energía transmitida como la distribución de dicha energía entre las diversas ondas componentes, para ello resulta útil investigar:
Potencia acústica: El nivel de potencia acústica es la cantidad de energía radiada en forma de ondas por unidad de tiempo por una fuente determinada. La potencia acústica depende de la amplitud.
21 Velocidad del sonido
El sonido tiene una velocidad de 331,5 m/s cuando: la temperatura es de 0 °C, la presión atmosférica es de 1 atm (nivel del mar) y se presenta una humedad relativa del aire de 0 % (aire seco). Aunque depende muy poco de la presión del aire.
La velocidad del sonido depende del tipo de material. Cuando el sonido se desplaza en los sólidos tiene mayor velocidad que en los líquidos, y en los líquidos es más veloz que en los gases. Esto se debe a que las partículas en los sólidos están más cercanas.
Fig. 4.5.3 U.S. Navy F/A-18 Avión rompiendo la barrera del sonido.
Fig. 4.5.4 Comportamiento de las ondas de sonido a diferentes velocidades
La velocidad del sonido se puede calcular en relación a la temperatura de la siguiente manera:
(4.5.2)
Donde:
, es la temperatura en grados Celsius.
Si la temperatura ambiente es de 15 °C, la velocidad de propagación del sonido es 340 m/s (1224 km/h ). Este valor corresponde a 1 MACH.
Reverberación
22 coloración tímbrica de esta cola dependen de: La distancia entre el oyente y la fuente sonora; la naturaleza de las superficies que reflejan el sonido. En situaciones naturales se habla de sonido directo para referirse al sonido que se transmite directamente desde la fuente sonora hasta el oyente (o hasta el mecanismo de captación que se tenga). Por otra parte, el sonido reflejado es el que se percibe después de que haya rebotado en las superficies que delimitan el recinto acústico, o en los objetos que se encuentren en su trayectoria. Evidentemente, la trayectoria del sonido reflejado siempre será más larga que la del sonido directo, de manera que -temporalmente- se escucha primero el sonido directo, y unos instantes más tarde son escuchadas las primeras reflexiones; a medida que transcurre el tiempo las reflexiones que llegan son cada vez de menor intensidad, hasta que desparecen. Nuestra sensación, no obstante, no es la de escuchar sonidos separados, ya que el cerebro los integra en un único precepto, siempre que las reflexiones lleguen con una separación menor de unos 50 milisegundos. Esto es lo que se denomina efecto Haas o efecto de precedencia.
Resonancia
Es el fenómeno que se produce cuando los cuerpos vibran con la misma frecuencia, uno de los cuales se puso a vibrar al recibir las frecuencias del otro. Para entender el fenómeno de la resonancia existe un ejemplo muy sencillo, Supóngase que se tiene un tubo con agua y muy cerca de él (sin éstos en contacto) tenemos un diapasón, si golpeamos el diapasón con un metal, mientras echan agua en el tubo, cuando el agua alcance determinada altura el sonido será más fuerte; esto se debe a que la columna de agua contenida en el tubo se pone a vibrar con la misma frecuencia que la que tiene el diapasón, lo que evidencia por qué las frecuencias se refuerzan y en consecuencia aumenta la intensidad del sonido. Un ejemplo es el efecto de afinar las cuerdas de la guitarra, puesto que al afinar, lo que se hace es igualar las frecuencias, es decir poner en resonancia el sonido de las cuerdas.
El sonido en la música
El sonido, en combinación con el silencio, es la materia prima de la música. En música los sonidos se califican en categorías como: largos y cortos, fuertes y débiles, agudos y graves, agradables y desagradables. El sonido ha estado siempre presente en la vida cotidiana del hombre. A lo largo de la historia el ser humano ha inventado una serie de reglas para ordenarlo hasta construir algún tipo de lenguaje musical.
Propiedades
23 Cualidad Característica Rango
Altura Frecuencia de onda Agudo, medio, grave
Intensidad Amplitud de onda Fuerte, débil o suave
Timbre Armónicos de onda o forma de la onda Fuente emisora del sonido
Duración tiempo de vibración Largo o corto
La altura
Indica si el sonido es grave, agudo o medio, y viene determinada por la frecuencia fundamental de las ondas sonoras, medida en ciclos por segundo o Hertz (Hz).
vibración lenta = baja frecuencia = sonido grave.
vibración rápida = alta frecuencia = sonido agudo.
Para que los humanos podamos percibir un sonido, éste debe estar comprendido entre el rango de audición de 16 y 20.000 Hz. Por debajo de este rango se tienen los infrasonidos y por encima los ultrasonidos. A esto se le denomina rango de frecuencia audible. Cuanta
más edad se tiene, este rango va reduciéndose tanto en graves como en agudos. La intensidad
Es la cantidad de energía acústica que contiene un sonido, es decir, lo fuerte o suave de un sonido. La intensidad viene determinada por la potencia, que a su vez está determinada por la amplitud y permite distinguir si el sonido es fuerte o débil.
24 En música se escriben así:
Nombre Intensidad
piano pianissimo(ppp) más suave que pianissimo
Pianissimo (pp) muy suave
Piano (p) suave
Mezzo Piano (mp) medio suave
Mezzo Forte (mf) medio fuerte
Forte (f) fuerte
Fortissimo (ff) muy fuerte
forte fortissimo (fff) más fuerte que fortissimo
El timbre
Es la cualidad que confiere al sonido los armónicos que acompañan a la frecuencia fundamental. La voz propia de cada instrumento que distingue entre los sonidos y los ruidos.
25 se dan no solamente por la naturaleza del cuerpo sonoro (madera, metal, piel tensada, etc.), sino también por la manera de hacerlo sonar (golpear, frotar, rascar).
Una misma nota suena distinta si la toca una flauta, un violín, una trompeta, etc. Cada instrumento tiene un timbre que lo identifica o lo diferencia de los demás. Con la voz sucede lo mismo. El sonido dado por un hombre, una mujer, un/a niño/a tienen distinto timbre. El timbre permitirá distinguir si la voz es áspera, dulce, ronca o aterciopelada. También influye en la variación del timbre la calidad del material que se utilice. Así pues, el sonido será claro, sordo, agradable o molesto.
La duración
Es el tiempo durante el cual se mantiene un sonido. Es posible escuchar sonidos largos, cortos, muy cortos, etc.
Los únicos instrumentos acústicos que pueden mantener los sonidos el tiempo que quieran, son los de cuerda con arco, como el violín, y los de viento (utilizando la respiración circular o continua); pero por lo general, los de viento dependen de la capacidad pulmonar, y los de cuerda según el cambio del arco producido por el ejecutante.
Ondas estacionarias
Hasta ahora se hablo de ondas propagándose en un medio, es decir ondas viajeras.
Las ondas estacionarias son el resultado de la interferencia de dos ondas viajeras iguales propagándose en direcciones contrarias. Por ejemplo, una onda que llega perpendicularmente a una pared y se refleja sobre sí misma.
La característica de las ondas estacionarias es que se generan puntos (eventualmente líneas o planos) en los cuales la amplitud de oscilación es siempre cero (nodos) y otros en los que es siempre máxima (antinodos o vientres). La distancia entre dos nodos será la mitad de la longitud de onda de la onda estacionaria ( / 2).
Dada una frecuencia que genera una onda estacionaria, los múltiplos de dicha frecuencia (es decir los armónicos) también producirán ondas estacionarias. El orden del armónico determinará la cantidad de nodos que se producen. Por ejemplo, el primer armónico generará un nodo, el segundo dos y así sucesivamente.
26
4.6.- SISTEMA AUDITIVO.
La función del sistema auditivo es, esencialmente, transformar las variaciones de presión originadas por la propagación de las ondas sonoras en el aire en impulsos eléctricos (variaciones de potencial), información que los nervios acústicos transmiten al cerebro para la asignación de significados.
Se puede dividir el sistema auditivo en:
4.6.1. Sistema auditivo periférico
El sistema auditivo periférico (el oído) está compuesto por el oído externo, el oído medio y el oído interno.
Fig. 4.6.1 Sistema auditivo periférico.
27
Oído externo
El oído externo está compuesto por el pabellón, que concentra las ondas sonoras en el conducto auditivo externo que desemboca en el tímpano.
La ubicación lateral de los pabellones derecho e izquierdo en el ser humano ha hecho casi innecesaria la capacidad de movimiento de los mismos, a diferencia de lo que sucede en muchos otros animales que tienen una amplia capacidad de movimiento de los pabellones, pudiendo enfocarlos en la dirección de proveniencia del sonido. De esta manera se contribuye a la función del pabellón, que es la de concentrar las ondas sonoras en el conducto auditivo externo.
La no linealidad de las funciones de transferencia del oído comienzan ya en el pabellón, ya que por sus características éste tiene una frecuencia de resonancia entre los 4,500 Hz y los 5,000 Hz.
El canal auditivo externo tiene unos 2.7 cm de longitud y un diámetro promedio de 0.7 cm. Al comportarse como un tubo cerrado en el que oscila una columna de aire, la frecuencia de resonancia del canal es de alrededor de los 3,200 Hz.
Oído medio
El oído medio está lleno de aire y está compuesto por el tímpano (que separa el oído externo del oído medio), los osículos (martillo, yunque y estribo, una cadena ósea denominada así a partir de sus formas) y la trompa de Eustaquio.
El tímpano es una membrana que es puesta en movimiento por la onda (las variaciones de presión del aire) que la alcanza. Sólo una parte de la onda que llega al tímpano es absorbida, la otra es reflejada. Se llama impedancia acústica a esa tendencia del sistema auditivo a oponerse al pasaje del sonido. Su magnitud depende de la masa y elasticidad del tímpano y de los osículos y la resistencia friccional que ofrecen.
28
El oído interno resuelve este desajuste de impedancias por dos vías complementarias. En primer lugar la disminución de la superficie en la que se concentra el movimiento. El tímpano tiene un área promedio de 69 mm2, pero el área vibrante efectiva es de unos 43 mm2. El pie del estribo, que empuja la ventana oval poniendo en movimiento el material linfático contenido en el oído interno, tiene un área de 3.2 mm2. La presión (fuerza por unidad de superficie) se incrementa en consecuencia en unas 13.5 veces.
Por otra parte el martillo y el yunque funcionan como un mecanismo de palanca y la relación entre ambos brazos de la palanca es de 1.31 : 1. La ganancia mecánica de este mecanismo de palanca es entonces de 1.3, lo que hace que el incremento total de la presión sea de unas 17.4 veces. El valor definitivo va a depender del área real de vibración del tímpano. Además, los valores pueden ser superiores para frecuencias entre los 2,000 Hz y los 5,000 Hz, debido a la resonancia del canal auditivo externo y a las frecuencias de resonancia características de los conos asimétricos, como lo es el tímpano. En general entre el oído externo y el tímpano se produce una amplificación de entre 5 dB y 10 dB en las frecuencias comprendidas entre los 2,000 Hz y los 5,000 Hz, lo que contribuye de manera fundamental para la zona de frecuencias a la que nuestro sistema auditivo es más sensible. Los músculos en el oído medio (el tensor del tímpano y el stapedius) pueden influir sobre la transmisión del sonido entre el oído medio y el interno. Como su nombre lo indica, el tensor del tímpano tensa la membrana timpánica aumentando su rigidez, produciendo en consecuencia una mayor resistencia a la oscilación al ser alcanzada por las variaciones de presión del aire.
El stapedius separa el estribo de la ventana oval, reduciendo la eficacia en la transmisión del movimiento. En general responde como reflejo, en lo que se conoce como reflejo acústico.
Ambos cumplen una función primordial de protección, especialmente frente a sonidos de gran intensidad. Lamentablemente la acción de esos músculos no es instantánea de manera que no protegen a nuestro sistema auditivo ante sonidos repentinos de muy alta intensidad, como pueden ser los estallidos o impulsos. Por otra parte, se fatigan muy rápidamente de manera que pierden eficiencia cuando nos encontramos expuestos por largo rato a sonidos de alta intensidad.
La acción de estos músculos tienen el efecto de un filtro, por cuanto se ofrece una mayor resistencia a la transmisión de frecuencias menores (más graves), favoreciendo por consiguiente las frecuencias mayores (más agudas), que suelen ser portadoras de un mayor contenido de información útil para el ser humano, tanto en el habla como en situaciones de la vida cotidiana.
29
La trompa de Eustaquio comunica con la parte superior de la faringe y por su intermedio con el aire exterior. Una de sus funciones es mantener un equilibrio de presión a ambos lados del tímpano.
Oído interno
Si en el oído externo se canaliza la energía acústica y en el oído medio se la transforma en energía mecánica transmitiéndola -y amplificándola- hasta el oído interno, es en éste en donde se realiza la definitiva transformación en impulsos eléctricos.
El laberinto óseo es una cavidad en el hueso temporal que contiene el vestíbulo, los canales semicirculares y la cóclea (o caracol). Dentro del laberinto óseo se encuentra el laberinto membranoso, compuesto por el sáculo y el utrículo (dentro del vestíbulo), los ductos semicirculares y el ducto coclear. Este último es el único que cumple una función en la audición, mientras que los otros se desempeñan en nuestro sentido del equilibrio.
El oído interno está inmerso en un fluido viscoso llamado endolinfa cuando se encuentra en el laberinto membranoso y perilinfa cuando separa los laberintos óseo y membranoso. La cóclea (o caracol) es un conducto casi circular enrollado en espiral (de ahí su nombre) unas 2.75 veces sobre sí mismo, de unos 35 mm de largo y unos 1.5 mm de diámetro como promedio. El ducto coclear divide a la cóclea en dos secciones, la rampa vestibular y la rampa timpánica.
30
La cóclea está dividida a lo largo por la membrana basilar y la membrana de Reissner.
Fig. 4.6.3 Corte de la cóclea.
El movimiento de la membrana basilar afecta las células ciliares (también llamadas capilares o pilosas) del órgano de Corti que al ser estimuladas (deformadas) generan los impulsos eléctricos que las fibras nerviosas (nervios acústicos) transmiten al cerebro. Pueden haber hasta cinco filas de células ciliares en el órgano de Corti, constando las más largas de unas 12,000 células en fila.
31
La membrana basilar no llega hasta el final de la cóclea dejando un espacio para la intercomunicación del fluido entre la rampa vestibular y la timpánica, llamado helicotrema que tiene aproximadamente unos 0.3 mm2 de superficie.
Fig. 4.6.5 La membrana basilar.
La membrana basilar se deforma como producto del movimiento del fluido linfático dentro de la cóclea. El punto de mayor amplitud de oscilación de la membrana basilar varía en función de la frecuencia del sonido que genera su movimiento, produciendo así la información necesaria para nuestra percepción de la altura del sonido. Las frecuencias más altas son procesadas en el sector de la membrana basilar más cercano al oído medio y las más bajas en su sector más lejano (cerca del helicotrema). La cantidad de células ciliares estimuladas (deformadas) y la magnitud de dicha deformación determinaría la información acerca de la intensidad de ese sonido.
32
Fig. 4.6.7 Esquema vibratorio de la membrana basilar.
El punto de mayor oscilación depende de la frecuencia
A partir del movimiento de la membrana basilar que deforma las células ciliares del órgano de Corti se generarían patrones característicos de cada sonido que los nervios acústicos transmiten al cerebro para su procesamiento.
Transmisión ósea
Además de a través del oído medio (el tímpano, los osículos), las ondas sonoras llegan al oído interno directamente por medio de la oscilación de los huesos del cráneo.
Ello es fácilmente comprobable si colocamos un diapasón vibrando sobre el parietal o sobre el hueso mastoideo (detrás del pabellón).
Dado que el oído interno se encuentra inserto en una cavidad del hueso temporal las oscilaciones del cráneo hacen entrar en oscilación directamente el fluido linfático, de una manera que no está totalmente clara aún. Lo que sí resulta evidente es que cualquiera de las dos formas de transmisión de las ondas es igualmente efectiva, sirviendo la transmisión ósea como medio alternativo cuando hay enfermedades en el oído medio.
33
4.6.2.- Sistema auditivo central
El sistema auditivo central está formado por los nervios acústicos y los sectores del cerebro dedicados a la audición. Se trata también de la parte del sistema auditivo de la que menos se conoce. Esto es consecuencia de nuestro escaso conocimiento del cerebro y su funcionamiento en general.
A menudo ignorado, el sistema auditivo central es fundamental en la audición, ya que es allí donde se procesa la información recibida y se le asignan significados a los sonidos percibidos, ya sea que pertenezcan a la música, al habla u otros.
El nervio auditivo contendría alrededor de 30,000 neuronas y su función principal es la de transmitir los impulsos eléctricos al cerebro para su procesamiento. Pero también parecen existir otras vías que conducen impulsos desde el cerebro hasta la cóclea. No se sabe mucho de estas neuronas descendentes, pero aparentemente servirían para ayudar a una especie de ajuste de sintonía fina en la selectividad de frecuencia de las células ciliares e incrementar las diferencias de tiempo, amplitud y frecuencia entre ambos oídos.
Cerebro
El cerebro es un órgano electroquímico y su conformación actual en el ser humano es el resultado de transformaciones sufridas a lo largo de millones de años de evolución. No obstante, es una de las partes del cuerpo humano sobre las cuales más se ignora.
En el cerebro hay miles de millones de neuronas, que son esencialmente similares a todas las demás células, pero que tienen la particularidad de recibir y transmitir impulsos eléctricos.
Cada neurona está comunicada con decenas de miles de otras neuronas, conformando todas ellas una red (redes neurales) de intercomunicación sumamente complicada. Mientras que ya cuando nacemos poseemos la totalidad de las neuronas, las conexiones entre ellas son el producto de procesos de aprendizajes. Esta capacidad de cooperar (trabajar en redes) de millones de pequeñas unidades de procesamiento serían la causa de la alta eficacia y la potencia en el funcionamiento del cerebro.
34
La memoria es una de las funciones más importantes de nuestro cerebro. Cada hecho a ser almacenado en la memoria es separado en partes y se guarda de manera asociativa (modelos asociativos) en diferentes conjuntos de neuronas interconectadas entre sí, de manera que su ubicación física está distribuida a lo largo de diversas partes del cerebro. Si el patrón recibido no existe y no es posible encontrar alguno que se le parezca, el cerebro tendrá la opción de desecharlo o de almacenarlo (funciones de las memorias de corto, mediano y largo plazo) convirtiéndolo en un nuevo patrón de comparación.
Aparentemente existirían en el cerebro al menos tres niveles diferenciados de procesamiento de los datos que transmiten los nervios acústicos. En un primer nivel el cerebro identificaría el lugar de procedencia del sonido (asociación de lugar, localización). En un segundo nivel el cerebro identificaría el sonido propiamente dicho, es decir, sus características tímbricas. Recién en un nivel posterior se determinarían las propiedades temporales de los sonidos, es decir su valor funcional a partir de su ubicación en el tiempo y su relación con otros sonidos que lo preceden y lo suceden, hecho de particular importancia en sistemas acústicos de comunicación como el habla (la lengua hablada) o la música.
Hemisferios cerebrales
El cerebro está dividido en los hemisferios derecho e izquierdo. Por alguna razón no totalmente aclarada los nervios se cruzan en la médula espinal de manera que cada hemisferio del cerebro controla esencialmente el lado opuesto del cuerpo. Cada hemisferio se especializa en la realización de funciones determinadas. Todo parecería indicar que en el hemisferio izquierdo se localizan los centros que controlan el lenguaje y las funciones lógicas, mientras que en el derecho se concentran aquellas funciones no verbales, las actividades artísticas y las funciones emotivas.
De igual manera cada uno de los hemisferios cumple funciones diferenciadas en el procesamiento de los sonidos recibidos. El cerebro es capaz de distinguir las características estructurales de los sonidos y, básicamente, el predominio de uno u otro hemisferio depende precisamente de la estructura de dicho sonido.
En el caso de la música el procesamiento se llevaría a cabo en el hemisferio derecho. Sin embargo, hay quienes afirman que esto sólo sería cierto en el caso de los individuos que no son músicos. Las personas con formación y entrenamiento musical, al tener la capacidad de acceder al fenómeno musical desde un punto de vista más analítico, procesarían esta información en el hemisferio izquierdo, que es el que se especializa en las funciones del razonamiento lógico.
35
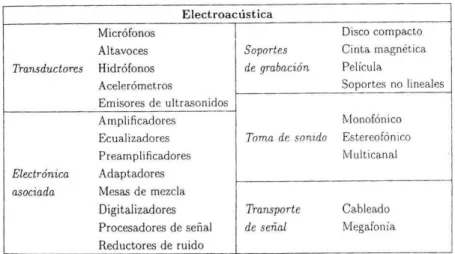
4.7.- ANALOGÍAS ELECTROACÚSTICAS.
La electroacústica es una parte de la acústica que estudia el modelado de sistemas mecánicos y acústicos con circuitos eléctricos. Su estrategia se basa en la aplicación de la teoría de los circuitos eléctricos para resolver problemas acústicos, puesto que ambos sistemas poseen ecuaciones diferenciales análogas. Es decir, para representar y analizar sistemas mecánicos y acústicos, que presentan cierta complejidad, es posible utilizar los elementos eléctricos y la teoría de circuitos, de los que se tiene mayor conocimiento y soltura. Por otro lado la electroacústica estudia la problemática en los fenómenos de conversión de señales acústicas en eléctricas y viceversa, también llamada transducción. Su
clasificación se presenta en la siguiente tabla.
Tabla 4.7.1 Electroacústica.
Analogías
Las analogías en electroacústica permiten estudiar los sistemas mecánicos y acústicos a partir de sus circuitos eléctricos equivalentes. Estos circuitos se obtienen por simple inspección del sistema a representar y deben cumplir cuatro requisitos:
1. El diagrama, paso anterior al circuito, debe formarse por simple inspección.
2. El circuito debe contener tanto elementos eléctricos puros como mecánicos y acústicos, ya que un transductor electroacústico contiene todos estos elementos. 3. Los elementos mecánicos y acústicos se representan con elementos eléctricos, sin
embargo, se debe conservar la identidad original de cada elemento representado (masa, compliancia o resistencia) para poder realizar una vuelta atrás y esbozar el sistema mecánico al cual pertenece un determinado circuito equivalente.
36
que las dimensiones típicas del transductor, algo que se cumple en la mayoría de los sistemas para el ancho de banda audible típico.
El circuito equivalente de un sistema mecánico o acústico contiene elementos de naturaleza eléctrica que representan ciertos fenómenos del sistema. Estos elementos son resistencias,
bobinas, condensadores y generadores de tensión y corriente. Por otro lado, las variables
representan los parámetros eléctricos, mecánicos y acústicos que dependen del tiempo, es decir, tensión eléctrica e, intensidad i, fuerza f, velocidad u, presión p y velocidad
volumétrica o flujo U. En un circuito, estas variables pueden ser de dos tipos: una caída
representada por una tensión eléctrica y un flujo, representado por una corriente eléctrica. La asignación de las variables mecánicas o acústicas a caídas o flujos, depende de la analogía elegida, que puede ser de dos tipos: analogía de tipo impedancia o directa y analogía de tipo movilidad o inversa.
Tabla 4.7.2 Variables Mecánicas y acústicas.
En la tabla 4.7.2, se muestran las variables mecánicas y acústicas asociadas a caídas representadas en el circuito equivalente mediante tensiones y la asociadas a flujos, representadas con intensidades. Las variables mecánicas y acústicas se relacionan de modo sencillo mediante
(4.7.1)
(4.7.2)
Donde S es la superficie del fluido normal al movimiento dentro del sistema a modelar.
37
Circuitos mecánicos
Las analogías electromecánicas permiten representar sistemas mecánicos, es decir, aquellos en los que se mueven sujetas, además de la fuerza de inercia, a fuerzas elásticas y de rozamiento.
En un circuito eléctrico, la intensidad se mide abriendo el circuito por algún punto mientras que la tensión se mide directamente sobre las terminales del dispositivo. Análogamente, en los circuitos mecánicos, se puede medir la velocidad sin manipular el dispositivo, por ejemplo, con un acelerómetro, mientras que la medida de la fuerza necesita intervenir sobre el dispositivo de algún modo. Esta es la razón por la cual se prefiere utilizar la analogía movilidad para modelar los sistemas mecánicos. Además, en un sistema mecánico, por
simple inspección, es más fácil averiguar que elementos se mueven con velocidades diferentes y por tanto, es conveniente asociarla a tensiones eléctricas. Por otro lado, no es inmediato saber que fuerzas están aplicadas sobre un elemento puesto que lo normal es que sea una suma de diferentes tipos de fuerzas, como ocurre con las corrientes que fluyen sobre un elemento eléctrico. El procedimiento consiste, por tanto, en localizar las distintas velocidades de los componentes del sistema y asignarles una tensión eléctrica con la que se construya el circuito equivalente.
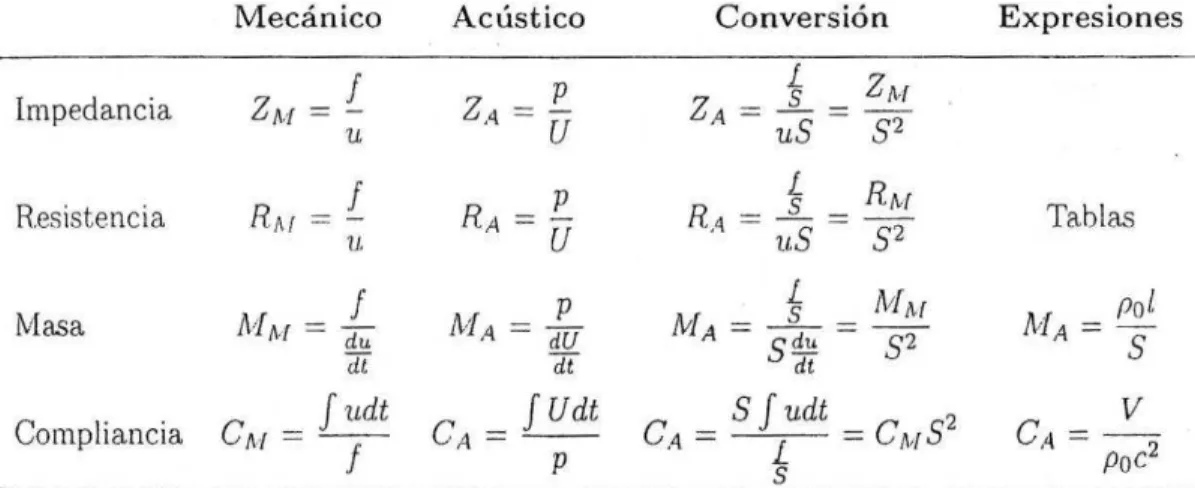
La impedancia mecánica ZM es la relación compleja entre la fuerza y la velocidad en un punto dado de un dispositivo mecánico y viene dada, para un sistema masa-resorte con un grado de libertad como
(4.7.3)
Donde RM es la resistencia mecánica, MM la masa mecánica y CM la compliancia mecánica.
La unidad de la impedancia mecánica es el ohm mecánico (Ωmec) o bien, en el sistema
internacional, Ns/m. La inversa de la impedancia mecánica es la movilidad mecánica zM y
su unidad es el mohm (Ʊmec) o m/Ns.
A continuación, se presentan los tres componentes de la impedancia mecánica, los generadores mecánicos y los transformadores mecánicos que componen parte del circuito equivalente de cualquier transductor electroacústico.
Resistencia mecánica.
La resistencia mecánica RM es la parte real de la impedancia mecánica y representa las
38 Fig. 4.7.2 Resistencia mecánica a) Símbolo en el diagrama mecánico, b) Analogía impedancia, c)Analogía movilidad.
Formalmente, una estructura o dispositivo mecánico se comporta como una resistencia mecánica cuando, accionada por una fuerza, esta es proporcional a la velocidad que adquiere. Esta afirmación es denominada ley del rozamiento, por la cual, en un elemento mecánico que se mueve con una velocidad u(t), se origina una fuerza contraria al
movimiento de valor,
(4.7.4)
Que es análoga a la ley de Ohm en una resistencia eléctrica,
(4.7.5)
Por lo que la resistencia mecánica se representa, en analogía impedancia, por una resistencia eléctrica de valor RM, cuya unidad es el kg/s o Ns/m. La ley de rozamiento
puede expresarse de modo inverso, es decir,
(4.7.6)
Que puede relacionarse de nuevo con una ecuación eléctrica para obtener el segundo tipo de analogía, movilidad, en la que la resistencia mecánica viene representada por 1/RM o,
alternativamente por rM,la inversa de la resistencia mecánica.
El símbolo de la resistencia mecánica en el diagrama mecánico es un pistón, ya que representa el rozamiento de éste con las paredes del cilindro en el que se encuentra.
Masa mecánica.
La masa mecánica MM es la parte imaginaria positiva de la impedancia mecánica y
39 Fig. 4.7.3 Masa mecánica a) Símbolo en el diagrama mecánico, b) Analogía impedancia, c)Analogía movilidad.
Formalmente, una estructura o dispositivo mecánico se comporta como una masa mecánica cuando accionada por una fuerza, resulta acelerada en proporción directa con la fuerza, es decir, cumple con la segunda ley de Newton, por la cual
(4.7.6)
Que es análoga a la ecuación de la autoinducción de una bobina en un circuito eléctrico, que realiza una labor de derivador de la intensidad que la recorre,
(4.7.7)
Por lo tanto, la masa mecánica se representa, en analogía impedancia, por una bobina de valor MM, cuya unidad es el kg o Ns2/m. Alternativamente, la segunda ley de Newton puede
escribirse en función de la fuerza para obtener
(4.7.8)
Que posee su analogía en el campo eléctrico en el condensador, ya que la tensión que cae en éste está relacionada con su capacidad por
(4.7.9)
y. en consecuencia, la masa mecánica se representa como un condensador de valor MM en
la analogía movilidad. Compliancia mecánica.
La compliancia mecánica CM es la parte imaginaria negativa de la impedancia mecánica, y
40 Fig. 4.7.4 Compliancia mecánica a) Símbolo en el diagrama mecánico, b) Analogía impedancia, c)Analogía movilidad.
Formalmente, una estructura o dispositivo mecánico se comporta como una compliancia cuando accionada por una fuerza, sufre un desplazamiento en proporción directa con la fuerza, lo cual corresponde a la ley de Hooke,
(4.7.10)
Donde u(t) es el desplazamiento del dispositivo mecánico. Esta ecuación es análoga a la de
un condensador en un circuito eléctrico,
(4.7.11)
Por lo que, en analogía impedancia, la compliancia mecánica se representa por medio de un condensador de valor CM, cuya unidad es el m/N. Por otro lado, expresando inversamente la
ley de Hooke,
(4.7.12)
Es posible obtener la analogía movilidad de la compliancia mecánica al relacionarla con
(4.7.13) Y afirmar que la compliancia mecánica es una bobina de valor CMen analogía movilidad.
Circuitos acústicos.
Las analogías acústicas permiten representar sistemas acústicos, es decir, aquellos en los que tienen lugar variaciones de caudal y presión en un fluido, líquido o gaseoso, como puede ser el aire o el agua.
De modo similar al estudio con circuitos mecánicos, en los circuitos acústicos se trata de encontrar dos magnitudes análogas a la tensión e intensidad, y establecer paralelismos que den lugar a analogías. La analogía preferida en este caso es la analogía impedancia ya que
41
determinado sin que la presencia de éste perturbe las condiciones en el campo. Sin embargo, aún es necesaria una magnitud más que pueda identificarse con la corriente eléctrica. Considerando un recinto cerrado, excepto por un orificio al que se le ha acoplado un tubo, ante una onda sonora, la presión en extremo interior del tubo es la misma que fuera de este, es decir, existe continuidad de presión. Por otro lado, la cantidad de aire que sale del tubo y entra en el recito en un intervalo dado es la misma que entra en el tubo por la parte exterior. Es decir, la masa de aire por segundo que sale del tubo es igual a la masa de aire por segundo que entra en el volumen. Cuando la presión es la misma en los dos extremos, la densidad del aire debe ser la misma, por lo que se infiere que existe continuidad en la velocidad volumétrica.
Fig. 4.7.5 Volumen cerrado conectado al exterior por un tubo en el que se produce continuidad de velocidad volumétrica
U.
Se concluye por tanto, que la cantidad que fluye a través de los elementos es velocidad
volumétrica U y la magnitud que cae es la presión p. La analogía tipo impedancia se
presenta como la idónea en el estudio de circuitos acústicos. Además en estos sistemas es más sencillo identificar las cavidades, que pueden poseer presiones distintas, que las velocidades volumétricas. De este modo a cada cavidad se le asignaría un nodo en la red eléctrica con su tensión correspondiente.
En el apartado anterior se han presentado los componentes de la impedancia mecánica que pueden resultar familiares puesto que son de uso cotidiano como la elasticidad -inversa de la compliancia mecánica- o la masa de un objeto. Sin embargo, la impedancia acústica es un concepto algo más abstracto, en el que el sentido común no puede ayudar a identificar correctamente sus componentes.
La impedancia acústica ZA es la relación compleja entre la presión acústica que actúa sobre el área de un sistema acústico y el caudal o velocidad volumétrica que fluye perpendicularmente al área y viene dado, en su aspecto más general por,
(4.7.14) Donde RA es la resistencia acústica, MA es la masa acústica y CA la compliancia acústica. La
unidad de la impedancia acústica es el Ohm acústico (ΩA) o bien en el sistema
internacional, Ns/m5. de nuevo, la inversa de la impedancia acústica es la movilidad acústica zAy su unidad es el m5/Ns.
La relación que existe entre la impedancia mecánica y la acústica es la superficie del sistema acústico que se somete a presión, elevada al cuadrado.
42
Por lo que a efectos prácticos, podría decirse que las magnitudes acústicas son las mecánicas por unidad de superficie al cuadrado. A continuación se presentan los tres componentes de la impedancia acústica, los generadores acústicos y los transformadores acústicos que componen el circuito equivalente de cualquier transductor electroacústico. Resistencia acústica.
La resistencia acústica RA es la parte real de la impedancia acústica y representa las
pérdidas disipativas que ocurren cuando hay un movimiento viscoso de una cantidad de gas a través de una malla fina o capilar.
Fig. 4.7.6 Resistencia Acústica a) Símbolo, b) Analogía impedancia, c) Analogía movilidad.
Formalmente, la ley de rozamiento viscoso dice que la presión sobre el fluido p necesaria
para vencer la resistencia acústica es proporcional al flujo U:
(4.7.16) La cual es muy parecida a la ecuación de la resistencia mecánica y análoga, a su vez, a la ley de Ohm. Por tanto, en analogía impedancia, la resistencia acústica se representa como una resistencia eléctrica de valor RAcuya unidad es Ns/m5. De nuevo, expresando la ley del
movimiento viscoso en modo inverso, es posible obtener el modelo de la analogía movilidad,
(4.7.17)
Por lo que la resistencia acústica queda representada por una resistencia eléctrica de valor 1/RA.
De un modo genérico, no es posible utilizar una expresión simbólica para el cálculo de RA,
43 Tabla 4.7.3 Resistencia acústica normalizada de una malla de superficie S en función de la densidad y diámetro de las
líneas.
Los materiales fibrosos como la fibra de vidrio o lanas minerales presentan una resistencia acústica proporcional a la densidad de empaquetamiento D del material. En general,
cualquier material que produzca un cambio de presión en la onda sonora que lo atraviesa se comporta como una resistencia acústica. Por ejemplo, un tubo relleno de material fibroso se modela como una masa acústica en serie con una resistencia acústica.
Masa acústica.
La masa acústica MA es la parte imaginaria positiva de la impedancia acústica y, puesto
que es proporcional a la masa de aire en el interior de un elemento, representa la capacidad del fluido de almacenar energía de inercia.
Fig. 4.7.7 Masa acústica a) Símbolo, b) Analogía impedancia, c) Analogía movilidad.
Formalmente, la masa acústica es una cantidad proporcional a la masa mecánica que asocia a una masa de aire acelerada por una fuerza neta que desplaza el gas sin comprimirlo apreciablemente, por lo cual verifica la segunda ley de Newton,
(4.7.18)
Expresión análoga a la de la autoinducción de una bobina en un circuito eléctrico, por tanto, la masa acústica se representa con una bobina de valor MA, cuya unidad es el Ns2/m5.
Alternativamente, la segunda ley de Newton puede expresarse en su modo recíproco para obtener
(4.7.19)
El símbolo de una masa acústica es simplemente un tubo. De hecho, los tubos son
44
La masa acústica modela el comportamiento del aire en un tubo, por ejemplo, el tubo que poseen algunas cajas acústicas para aumentar su respuesta en frecuencias bajas. En general, la masa acústica de un tubo abierto por sus dos extremos de longitud l y sección S viene
dada por
(4.7.20)
Donde ρ0 es la densidad acústica del aire de valor aproximado 1.21 kg/m3. Sin embargo, cuando el aire del tubo se mueve, existe un volumen de aire fuera del tubo que se desplaza a la misma velocidad que en el interior. Para modelar correctamente este fenómeno, los dos volúmenes fuera del tubo deben añadirse al volumen del interior, que en conjunto significa mayor masa acústica. Para este fin, se definen unas correcciones a la longitud del tubo que dependen del carácter de la terminación: si el tubo termina libremente, es decir, no lleva acoplada ninguna superficie, se dice que es una terminación “sin pestaña” y la corrección es
l1; si en la terminación hay una superficie plana en el borde del tubo, se denomina
terminación “con pestaña”, siendo su corrección de l2.
Fig. 4.7.8 Corrección por terminación libre l1 y terminación con pestaña l2
Numéricamente, las correcciones de la masa acústica vienen dadas por
Donde, para geometrías distintas de las del tubo, el termino a en esta última expresión puede sustituirse por la fórmula √ ⁄ , donde S es la superficie de radiación. La longitud
efectiva lef es la suma de la longitud propia del tubo y las correcciones, que, para el caso del
tubo en una caja acústica, sería
(4.7.21) En el caso de que la masa acústica esté constituida por un simple orificio, la longitud total es igual a la longitud del tubo, es decir, el espesor de la pared en que se ha practicado el orificio, sumando dos veces la corrección con pestaña, una por cada extremo.