ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA Unidad Profesional “Adolfo López Mateos”
INTERFAZ HUMANO MÁQUINA (H.M.I.) PARA EL
CONTROL DE MOVIMIENTO
T E S Í S
QUE PARA OBTENER EL TÍTULO DE
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
P R E S E N T A
MARIBEL ALEJANDRA CORONA CALDERÓN
Página 1 Son tantas personas a las cuales debo parte de este triunfo, de lograr alcanzar mi culminación académica, la cual es el anhelo de todos los que así lo deseamos.
Definitivamente, Dios, mi Señor, mi Guía, mi Proveedor; sabes lo esencial que has sido en mi posición firme de alcanzar esta meta, pero a través de esta, podré siempre de tu mano alcanzar otras que espero sean para tu Gloria.
Mi hermano (eres el mejor hermano que alguien puede tener), mis padres y familia por darme la estabilidad emocional, económica, sentimental; para poder llegar hasta este logro, que definitivamente no hubiese podido ser realidad sin ustedes. GRACIAS por darme la posibilidad de que de mi boca salga esa palabra…FAMILIA. Pero sobre todo a mi Madre y Mamita, serán siempre mi inspiración para alcanzar mis metas, por enseñarme que todo se aprende y que todo esfuerzo es al final recompensa. Sus esfuerzo, se convirtieron en tu triunfo y el mío, LAS AMO.
A mi NOVIO Luis por su apoyo y amor incondicional, durante los grandes tropiezos y alegrías que pasamos durante la carrera y en el desarrollo de esta tesis, fuiste un pilar en los ánimos y desarrollo de esto, gracias y ser parte de mi vida, te amo.
A Iván, la persona que fue mi apoyo durante este agradable y difícil periodo académico, por ser MI AMIGO, y por seguir soportándome.
A todos mis amigos pasados y presentes; pasados por ayudarme a crecer y madurar como persona y presentes por estar siempre conmigo apoyándome en todo las circunstancias posibles, también son parte de esta alegría.
A mi asesor de tesis el M. en C. Juan José Muñoz Cesar, por su constante y paciente seguimiento, sus apreciados y relevantes aportes, críticas, comentarios y sugerencias durante el desarrollo de esta investigación, pero sobre todo por ser el último escalón para poder alcanzar este sueño, que ahora es una realidad.
Y a mis dos hijos por quienes he mejorada el valor y sentido de la responsabilidad.
i Objetivo
ii La presente tesis plantea cumplir los siguientes objetivos:
1. El manejo de un programa orientado a la construcción y diseño de Interfaces graficas. 2. Presentar las diferentes analogías de las Interfaces Graficas en la actualidad.
3. Mostrar las vías de funcionamiento de las vías de comunicación y el fin que persiguen cada una de ellas
4. Explicar las complicaciones más comunes en la conexión entre dos hardwares. 5. Diseño de un a H.M.I. en el software RSview ME para el control del Ultra 3000. 6. La configuración del Panel View Plus 1000 y Servodrive Ultra3000 para prácticas de
iii En la búsqueda de la nueva tecnología se pretende que el usuario, tenga más facilidad de diseñar y realizar actividades, es por eso que se decidió implementar una Interfaz Hombre Máquina (H.M.I.) ya que actualmente la tecnología va avanzando rápidamente, al operar maquinaria de cualquier industria se realizaba con interfaces graficas muy arcaicas de las cuales el hombre tenía que intervenir frecuentemente para lograr realizar la tarea para la cual fue diseñada la interfaz.
A pesar de que las interfaces no eran, lo que son ahora, en aquel entonces ayudaron a muchos hombres en su progreso, conforme al paso del tiempo las Interfaces Hombre-Máquina (H.M.I.) fueron en base a su sistema de programación las que modificaron la forma de trabajo y la calidad de los productos que las personas consumen día con día.
Es importante que la industria mejore todos sus sistemas de procesos haciendo uso de la nueva tecnología. La revolución industrial ha sido la precursora de que día con día exista la mejora y diseño de maquinaria que facilite el trabajo de una empresa. Nuestro estudio de trabajo como ya se ha mencionamos son Las Interfaces, Las cuales sin duda alguna han mejorado varias cosas, como por ejemplo, la calidad del producto, rapidez, efectividad entre otras. Las Interfaces Hombre Máquina son las que nos permiten una visualización, y maniobra de los equipos industriales, ya que puede estar más cerca del proceso.
Es por eso que se ha decidió desarrollar el tema de las H.M.I.`S, para conocer el manejo y diseño de ellas en los últimos avances de la tecnología con respecto a la Industria.
Las Interfaz Hombre Máquina de nuestros días son más fáciles de controlar por las personas, ya que la compleja programación que se realiza hace que las interfaces lleven de la mano a su operador para un trabajo satisfactorio
iv Se cuenta con un equipo industrial (servo driver Ultra 3000) el cual controla un motor, indicándole cuantas revoluciones por segundo debe dar y en qué momento ejecutarlas, mediante un encordé, el motor notificara cada cuando se realizara el movimiento, el servo driver Ultra 3000 se programa en Ultrajare, este programa podremos insertarle cuantas vueltas deseamos que realice, y de la misma forma el encordé nos notificara si el equipo está realizando lo que se le solicito, todo este procedimiento lo podemos visualizar en la pantalla de nuestra computadora.
Se pretender controlar un motor y visualizar las señales del encoder, mediante una Interfaz Hombre-Máquina, en la cual se pretende implementar las mismas aplicaciones que tiene el sistema de programación del servo driver Ultra 3000, esto dará ventajas notables sobre la aplicación en el control del servo driver, porque el panel podrá controlar todo el movimiento sin la necesidad de llevar nuevamente la computadora y modificar los parámetros de movimiento si es que así se desea, el panel no importando a qué distancia se encuentre, podrá realizar dicha acción.
Para implementar la comunicación de una H.M.I., se necesita seleccionara de varias empresas más conocidas en la industria el equipo más adecuado y eficiente para el control de dicho driver
v
Contenido
Objetivo ... i
Objetivos Particulares ... ii
Justificación ...iii
Planteamiento del Problema ... iv
Contenido ... v
Índice de tablas ... ix
Índice de Figuras ... xi
Capítulo 1 Interfaz Hombre Máquina ... 1
1.1 Introducción ... 2
1.2 Conceptos de interface ... 3
1.3 Interacción hombre-máquina ... 4
1.4 Clasificación de interfaz hombre-máquina ... 5
1.4.1 Por la forma de interactuar del usuario ... 5
1.4.2 Según su evolución ... 6
1.4.3 Interfaces de línea de mandatos (Command-Line User Interfaces, CUI). ... 6
1.4.4 Interfaces de menús. ... 6
1.4.5 Interfaces Gráficas de Usuario (Graphical User Interfaces-GUI) ... 7
1.4.6 Interfaces de Usuario Orientadas a Objetos (Object Oriented User Interfaces, O.O.U.I.S.). ... 8
1.5 Características de los sistemas con interfaces ... 10
1.6 Tipos de sistemas con interfaz hombre máquina ... 11
1.7 PROTOCOLOS DE COMUNICACIÓN ... 14
1.7.1 Niveles de abstracción ... 15
1.7.2 Funciones de protocolo ... 16
vi
1.8 Topologías de red ... 18
Capítulo 2 Selección del Equipo ... 20
2.1 Introducción ... 21
2.2. SIEMENS ... 21
2.2.1. Beneficios... 22
2.2.2. El Software ... 23
2.2.3. Parte de la Totally Integrated Automation ... 23
2.2.4. Manejo y visualización intuitivos ... 23
2.2.5. Características generales de los paneles SIMATIC... 24
2.3. Mitsubishi ... 27
2.3.1. Serie E (la interfaz entre el hombre y la técnica) ... 28
2.3.1.1 Serie E1000 ... 28
2.3.1.2 Serie MAC E ... 29
2.3.2. Serie de Terminales Graficas de Operaciones (G.O.T.) ... 30
2.3.2.1 GT1020/GT1030... 31
2.3.2.2 Serie GOT1000 ... 34
2.3.2.3 Serie GOT900 ... 35
2.3.3. IPC industriales ... 37
2.3.4 Software ... 38
2.3.4.1 Visualización ... 38
2.3.4.2 MX-Componentes ... 39
2.3.5 Programación ... 39
2.3.5.1 E Designer ... 39
2.3.5.2 G.T. Works ... 39
2.3.5.3 Software MELSOFT - G.T. Works ... 39
2.3.5.3.1 Funciones ... 40
2.4 Schneider ... 40
2.4.1 Magelis XBT GT ... 41
2.5. Rockwell Autmation (Allen Bradley) ... 41
2.5.1. Comencemos describiendo los Paneles View plus 400 y 600 ... 42
2.5.2. Panel View Plus 700 a 1500... 44
2.6. Selección del equipo ... 48
vii
3.1. Introducción: ... 52
3.2. La pantalla táctil... 52
3.3. Componentes modulares ... 53
3.3.1. La unidad base de configuración ... 53
3.3.2. El módulo de la lógica contiene: ... 53
3.3.3. Los módulos y Compact Flash de la lógica ... 54
3.3.4. Los módulos de la comunicación ... 54
3.4. Localizaciones ... 55
3.4. Instalación de P.V.P. de alta resolución al aire libre ... 56
3.5. Las herramientas requeridas para la instalación ... 57
3.6. Dimensiones ... 60
3.7. Los equipos 1000 especificación de terminales ... 61
3.7.1. Las conexiones AC ... 62
3.8. Conexión PC-PVP-Ultra3000... 64
Capítulo IV: DISEÑO Y CONFIGURACIÓN DE LA H.M.I. ... 66
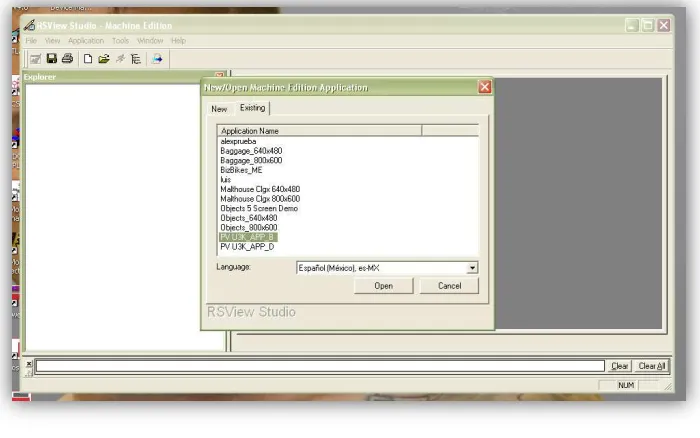
4.1 Creando la Aplicación ... 67
4.1.1 Pantalla de menú ... 69
4.1.2. Pantalla de fallas ... 72
4.1.3. Pantalla de posición. ... 76
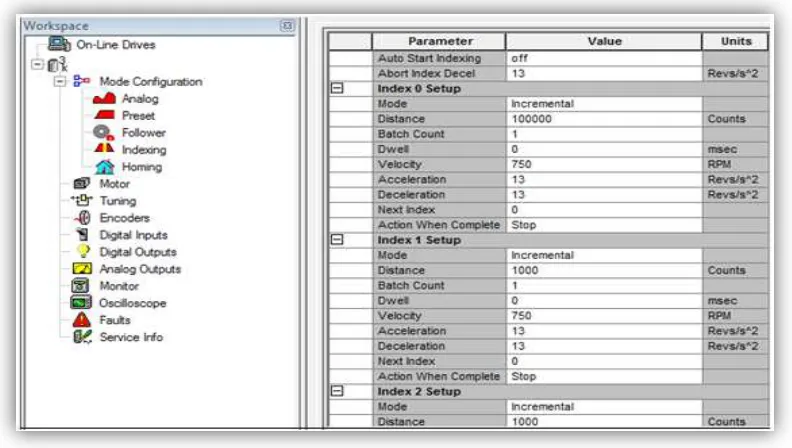
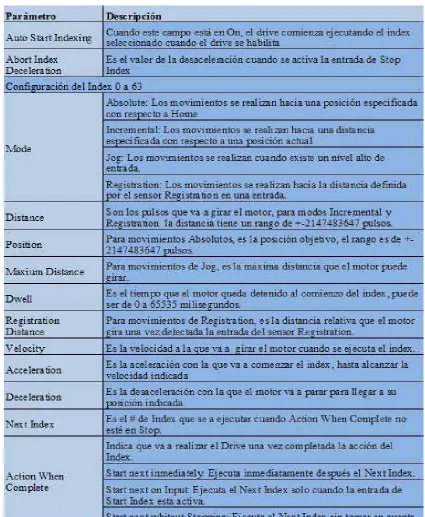
4.1.4. Modo de operación indexado ... 79
4.1.5 Posiciones home ... 87
4.1.6 Pagina de operación ... 94
4.2. Configuración de botones ... 99
4.2.2. Momentary Push Button ... 102
4.2.3. Numeric input cursor ... 105
4.2.4. Numeric Display. ... 108
4.2.5. Control List Selector ... 110
4.2.6. List Indicator ... 113
4.2.7. Rounded Rectangle ... 116
4.2.8. Move Up Button ... 118
viii
4.2.10. Enter Button ... 124
4.2.11. Information Message Display ... 126
4.2.13. Text ... 127
4.2.14. Goto Display Button ... 129
4.2.15. Image ... 131
4.2.16. Shutdown Button ... 132
4.3. Configuración del equipo para su descarga sobre el Panel View Plus ... 134
4.3.1 Configurando pantalla de Inicio ... 134
4.3.2. Guardando Pantalla de Aplicación ... 135
4.3.3 Descarga del proyecto computadora-P.V.P. ... 139
Capítulo V: Puesta en marcha y aplicación ... 146
5.1. Resultados ... 147
5.2. Aplicación a futuro ... 147
Capítulo VI: Costos ... 151
Conclusiones ... 154
ix
Índice de tablas
Tabla 1 Principales diferencias entre GUI y OOUI ... 9
Tabla 2 Clasificación de Sistemas ... 12
Tabla 3 Niveles del Sistema OSI ... 15
Tabla 4 Niveles del Sistema TCP/IP ... 16
Tabla 5 Software de configuración de SIMATIC... 24
Tabla 6 Características principales de los Paneles ... 24
Tabla 7 Resumen de datos Técnicos ... 25
Tabla 8 continuación ... 26
Tabla 9 Datos generales de los paneles de la serie GOT ... 33
Tabla 10 Funcionalidad básica de las pantallas ... 35
Tabla 11 Características de los paneles serie GOT900 ... 36
Tabla 12 Modelos de las serie IPC ... 38
Tabla 13 Tabla Comparativa de HMI`S ... 50
Tabla 14 Espacio en la instalación del PVP ... 57
Tabla 15 Parámetros de conexión del PVP ... 62
Tabla 16 Tipo de cableado ... 62
Tabla 17 Cable para conexión de tierra... 62
Tabla 18 Parámetros del Modo Indexing ... 80
Tabla 19 Parámetros de Homing ... 88
Tabla 20 Costo de Equipo ... 152
xi
Índice de Figuras
Figura 1 Mouse uno de las diferentes Interfaz Hombre Màquina 3
Figura 2 Menús de Windows 98 6
Figura 3 Interfaz de Menú de Windows Vista 7
Figura 4 Esquema de una Interfaz para un Sistema Semiautomático 13 Figura 5 Estructura Jerárquica de la Comunicación Industrial 17
Figura 6 HMI de Mitsubishi 27
Figura 7 Paneles de la serie E1000 de Mitsubishi 28
Figura 8 Paneles de la serie E1000 28
Figura 9 Paneles de la serie Mac E 29
Figura 10 Paneles de la serie GOT 30
Figura 11 Paneles de la serie GOT1000 31
Figura 12 Panel de la serie GOT1000 34
Figura 13 Panel de la serie GOT900 35
Figura 14 Monitores IPC 37
Figura 15 Pantallas Táctiles de Schneider 40
Figura 16 Panel View con pantalla táctil 43
Figura 17 Entradas de y ranuras de comunicación de Panel View Plus 400 o 600 44
Figura 18 Panel View plus con teclado numérico 45
Figura 19 Penel`s View de las Series 700 a1500 47
Figura 20 Panel View Plus Táctil 52
xii
Figura 22 Vista trasera del panel View 58
Figura 23 Montaje de clips 58
Figura 24 Atornillado de los clips 59
Figura 25 Diagrama de atornillado 59
Figura 26 Pantalla Táctil 60
Figura 27 Conexiones de corriente 61
Figura 28 Conexiones de AC del PVP 63
Figura 29 Vista lateral del PVP 64
Figura 30 Conexión PC-PVP-Ultra3000 65
Figura 31 Inicio del programa 67
Figura 32 Creando nueva aplicación 68
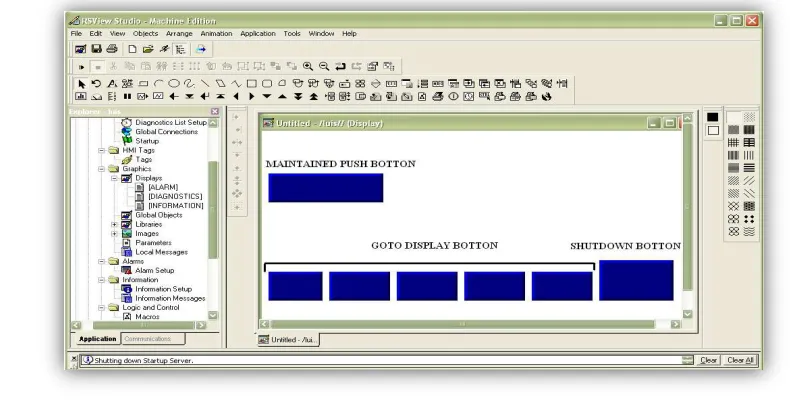
Figura 33 Espacio de trabajo RS View ME 68
Figura 34 Botón de estado mantenido 70
Figura 35 Botón de ir a 70
Figura 36 Botón de salir de proyecto 71
Figura 37 Pantalla inicial de menú 71
Figura 38 Pantalla final de menú 72
Figura 39 Espacio de trabajo RSViewME 73
Figura 40 Botón de estado momentáneo 73
Figura 41 Indicador de lista 74
Figura 42 Inserción de Texto 74
xiii
Figura 44 Pantalla inicial de Fallas 75
Figura 45 Pantalla final de fallas 75
Figura 46 Dispaly Numerico 76
Figura 47 Inserción de una figura rectangular 77
Figura 48 Inserción de texto 77
Figura 49 Botón ir a 77
Figura 50 Inserción de Imagen 77
Figura 51 Pantalla inicial de Posición 78
Figura 52 Pantalla final de posición 78
Figura 53 Modo Indexing 79
Figura 54 Botón Mantenido 83
Figura 55 Botón de Mantenido Momentáneo 83
Figura 56 Display Numérico 83
Figura 57 Lista de Selección 84
Figura 58 Botón de deslizamiento hacia arriba 84
Figura 59 Botón de deslizamiento hacia abajo 84
Figura 60 Botón de enter 85
Figura 61 Funcion Texto 85
Figura 62 Botón ir a... 85
Figura 63 Boton de Imagen 86
Figura 64 Pantalla de Indexado inicial 86
xiv
Figura 66 Modo Homing 88
Figura 67 Boton de estado mantenido 90
Figura 68 Boton de Estado momentario 90
Figura 69 Display numérico 90
Figura 70 Lista de Selección 91
Figura 71 Botón mover hacia arriba 91
Figura 72 Botón Mover hacia abajo 91
Figura 73 Boton enter 92
Figura 74 Cuadro de Texto 92
Figura 75 Botón ir a 92
Figura 76 Función insertar imagen 93
Figura 77 Pantalla inicial de Homing 93
Figura 78 Pantalla Final de Homing 94
Figura 79 Botón de posición mantenida 95
Figura 80 Botón de posición momentánea 95
Figura 81 Display numérico 95
Figura 82 Función insertar figura rectangular 96
Figura 83 Seleccionando Message Display 96
Figura 84 Función Texto 97
Figura 85 Botón ir a 97
Figura 86 Función imagen 97
xv
Figura 88 Pantalla final de operación 98
Figura 89 Propiedades de estado del botón mantenido 100
Figura 90 Propiedades de campo del botón mantenido 101
Figura 91 Propiedades generales del botón momentáneo 103
Figura 92 Propiedades de estado del botón momentáneo 104
Figura 93 Propiedades de conexión 105
Figura 94 Propiedades generales del cursor numérico 106
Figura 95 Propiedades numéricas del cursor numérico 107
Figura 96 Propiedades de tiempo en espera de botones 107
Figura 97 Propiedades de campo del cursor numérico 108
Figura 98 Propiedades de conexión del cursor numérico 108
Figura 99 Propiedades generales del display numérico 109
Figura 100 propiedades de conexión del display numérico 110
Figura 101 propiedades generales de la lista de selección 111
Figura 102 Propiedades de estado de la lista de selección 112
Figura 103 Propiedades de tiempo en espera del boton de la lista de selecciòn 112
Figura 104 Propiedades de campo de la lista de selección 113
Figura 105 Propiedades de conexión de la lista de selección 113
Figura 106 Propiedades generales de la lista indicadora 114
Figura 107 Propiedades de estado de la lista indicadora 115
Figura 108 Propiedades de conexión de la lista indicadora 115
xvi
Figura 110 Animación de objeto 117
Figura 111 Configuración del tag de animación 118
Figura 112 Propiedades generales del botón para el movimiento vertical hacia arriba 119 Figura 113 Propiedades de etiqueta del botón de movimiento vertical hacia arriba 120 Figura 114 Tiempo de espera del boton de movimiento vertical hacia arriba 121 Figura 115 Propiedades generales del movimiento vertical hacia abajo 122 Figura 116 Propiedades de etiqueta del botón de movimiento vertical hacia abajo 123 Figura 117 Propiedades de tiempo de espera del botón del movimiento vertical hacia abajo 123
Figura 118 Propiedades generales del botón enter 124
Figura 119 Propiedades de etiqueta del botón enter 125
Figura 120 Propiedades de campo del botón enter 126
Figura 121 Propiedades generales del display informativo 127
Figura 122 Propiedades generales de la función texto 128
Figura 123 Propiedades da campo de la función texto 128
Figura 124 Propiedades Generales del botón Goto 129
Figura 125 Propiedades de etiqueta del botón Goto 130
Figura 126 Ventana de listado de imágenes 131
Figura 127 Ventana de archivos 132
Figura 128 Propiedades generales del botón Shutdown 133
Figura 129 Propiedades de etiqueta del botón Shutdown 133
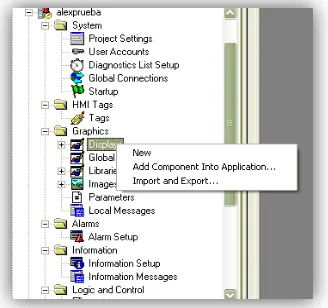
Figura 130 Menú explorador del RS View ME 134
xvii
Figura 132 Menú Explorador del RS View ME 136
Figura 133 Menú explorador de displays 136
Figura 134 Listado de Untitled 137
Figura 135 Ventanas de nombrado a pantalla 137
Figura 136 Guardando nombre de Pantallas 138
Figura 137 Guardando pantallas con nombres deseados 138
Figura 138 Agregando equipo 139
Figura 139 Comunicación disponible 140
Figura 140 Agregando hardware 140
Figura 141 Insertando dirección IP 141
Figura 142 Corriendo Proyecto 142
Figura 143 Proyecto en ejecución 142
Figura 144 Creando archivo runtime 143
Figura 145 Opción de Transferencia 143
Figura 146 Ventana de transferencia 144
Figura 147 Corte a Longitud 148
Figura 148 Ventana de Indexado final 149
Figura 149 Secuencias de movimiento para corte a longitud 150
Página 1
Página 2
1.1 Introducción
Sin darnos cuenta las interfaces nos han rodeado poco apoco se han convertido en parte cotidiana de nuestra vida. Cuando enciendes la televisión con el control remoto, cuando encendías la radio para escuchar música o en la lavadora de tu hogar.
Nos percataremos de cómo las interfaces han evolucionado atreves del tiempo e interfiriendo en nuestras actividades. Sabemos que como todo las interfaces van progresando y por lo mismo nunca dejan de estar en renovación. tenemos en cuenta que para mejorar tenemos que estar haciendo experimentos combinando lo uno con lo otro para que este tipo de combinaciones nos llegue a dar resultados innovadoras, donde los dispositivos de intercambio son útiles , pero de la misma forma existen veces en las que este tipo de conjunciones son completamente deficientes. Es así como todo tipos de comunicación ha ido evolucionando.
Nos interesan las interfaces como totalidad: por costumbre o por método escribe el francés Eric Landowski ``las tijeras se han convertido en el principal instrumento del investigador `` (1990). Separa la interfaz del video juego de la interfaz de un software aplicativo, al menos en una primera fase de acercamiento a la problemática de la interactividad con las máquinas digitales, significa aislar elementos que forman un sistema, fragmentando las relaciones que los conectan entre sí. Las interfaces como los mitos de Levy Strauss se ``piensan entre si `` y constituyen un complejo sistema que remite del simulador de vuelo a la enciclopedia multimedia y del procesador de textos de electrodomésticos
El investigador de los equipos digitales de interacción no puede escapar de los sistemas generales de las interfaces
Página 3 Si bien es cierto que las interfaces no solo conversan con los humanos, sino que también lo hacen entre ellas esto significa que no pueden ser aisladas de su universo interactivo
Por lo tanto el dialogo entre las interfaces digitales y los dispositivos interactivos del mundo real que utilizamos cotidianamente asume un rol
1.2 Conceptos de interface
Existen varios conceptos de interfaces, que a continuación se presentarán.
Lewis y Rieman definen a las interfaces hombre-máquina aquellos canales por los cuales la computadora nos permite comunicarnos con ella, tal es el caso de los menús, ventanas, teclado, ratón como se puede apreciar en la figura 1, entre otros.
Figura 1 Mouse uno de las diferentes Interfaz Hombre Máquina
Se puede decir que la interfaz hombre-máquina es un sistema de traducción, porque la interfaz facilita la comunicación de un usuario con una máquina, tomemos en cuenta que la personas al ver verbo-icono entienden lo que se les pide, y los procesadores de las máquinas se comunican en binario
Página 4 Las entradas son introducidas por medio de dispositivos como: el teclado, el cual emitirá una señal que será procesada por la computadora, de la computadora será enviada por un bus y controlada por la unidad de proceso central. Una vez que las señales son recibidas, estas emiten los resultados mediante señales electrónicas (salidas) que son transmitidas por el bus a uno o más dispositivos como las pantallas o actuadores.
Entonces definimos a una interfaz de software aquella en la cual el usuario interactúa, la interfaz de software también va de la mano con la estructura y el código. La interfaz incluye pantallas, ventanas, controles, etc., entonces se dice que cualquier cosa con la que el usuario interactúa es parte de la interfaz.
Una interfaz inteligente, permite que el usuario realice sus trabajos y tareas de una manera más eficiente, en lugar de que el usuario se ajuste al software, la interfaz inteligente está pensada para las personas que la vana utilizar.
La idea fundamental en el concepto de interfaz es el de mediación, entre hombre y máquina.
1.3 Interacción hombre-máquina
Se entiende como interacción hombre-máquina a la combinación de unos o varios seres humanos con uno o más componentes, proporcionando entradas y obteniendo resultados (producción).
Esta interacción nos ayuda a entender y mejorar las nuevas tecnologías, y de esta manera obtendremos un trabajo con eficiencia y calidad en cualquier proceso, en el cual se pretende tenga menos errores que los procesos con los que contamos en la actualidad. La humanidad se ha tenido que estar relacionando cada vez más con las Máquinas por las siguientes dos razones:
Página 5
Máquina: consiste en prácticamente cualquier objeto físico, aparato, equipamiento, medio de trabajo, etc., que la gente emplee para realizar cualquier actividad dirigida o para llevar a cabo cualquier propósito deseado o desempeñar alguna función.
Se sabe que el interés en la creación de interfaces ha crecido notablemente, lo único malo es que la este tipo de estudio solo ha sido dirigido programadores, que son hábiles en la interacción con el ordenador.
Sólo algunos de los más recientes estudios se ocupan más específicamente de los usuarios casuales o principiantes, los cuales a la actividad de resolver problemas. En otras palabras, se está haciendo necesario el que la dificultad de interactuar con las Máquinas sea menos compleja,
1.4 Clasificación de interfaz hombre-máquina
Cuando hablamos de tipo de interacción con el usuario nos encontramos varias interfaces. Hardware: sistemas operativos, lenguajes de programación, aplicaciones. Software: ratón, teclado, monitor, puertos, de las cuales se desprenderán otro tipo de clasificaciones.
1.4.1 Por la forma de interactuar del usuario
En este tipo de clasificación nos encontraremos algunas:
Como son las alfanuméricas, las cuales solo se comunicaran con el usuario mediante textos Las Interfaces Graficas de Usuario (GUI, Graphics User Interfaces), las cuales nos permitirán
visualizar los objetos que se están controlando.
Página 6
1.4.2 Según su evolución
En este tipo de clasificación contamos prácticamente con las interfaces diseñadas en los sistemas operativos, los cuales suelen interactuar con los usuarios expertos en programación. Por lo cual deducimos que las interfaces de evolución van de la mano con la evolución de cada sistema operativo.
1.4.3 Interfaces de línea de mandatos (Command-Line User Interfaces, CUI).
Este tipo de interfaz es muy característico del sistema MS-DOS en el cual se introducían líneas de comandos, estos comandos llevaban consigo instrucciones a ejecutar por el programa, estas líneas de comendo se introducían mediante el teclado. La interfaz tipo CUI es adecuado para usuarios expertos
1.4.4 Interfaces de menús.
Los menús son una lista de opciones que permiten al usurario navegar dentro de un sistema, que nos llevan a nuevas rutas o nuevos menús, pero también nos ayudan a seleccionar elementos con propiedades que los usuarios desean. Existen distintos tipos de menús. Los primeros fueron los menús de pantalla completa, estructurados jerárquicamente como la figura 2 lo muestra
Página 7 Las interfaces de menús bien hachas, suelen ser usadas por usuarios no expertos en interfaces, ya que son fáciles de aprender, pero también existen menús más complejos.
Actualmente las interfaces graficas u orientadas a objetos utilizan menús, ya que ningún estilo de interfaz es exclusivo, y suelen ser ocupadas por otros estilos de interfaces, la figura 3 nos muestra un ejemplo más reciente de una interfaz de menú.
Figura 3 Interfaz de Menú de Windows Vista
1.4.5 Interfaces Gráficas de Usuario (Graphical User Interfaces-GUI)
Desarrolladas originalmente por XEROX, aunque popularizadas por Apple y Apple Macintosh, con éxito debido en gran medida a su campaña publicitaria.
Aquí mostraremos tres estilos de interfaces graficas, que son:
Lo que tú ves es lo que puedes conseguir (WYSIWYG What you see is what you get)
Manipulación directa
Interfaces de usuario basados en iconos.
GUI nos visualizara el ordenador, datos y objetos y la interacción con ellos, también nos proporciona herramientas para realizar las operaciones con el fin de realizar una tarea.
Características de una GUI
Posee un monitor gráfico de alta resolución.
Página 8 Promueve la consistencia de la interfaz entre programas.
Los usuarios pueden ver en la pantalla los gráficos y textos tal como se verán impresos. Sigue el paradigma de la interacción objeto-acción.
Permite la transferencia de información entre programas.
Se puede manipular en la pantalla directamente los objetos y la información. Provee elementos de interfaz estándar como menús y diálogos.
Existe una muestra visual de la información y los objetos (iconos y ventanas). Proporciona respuesta visual a las acciones del usuario.
Existe información visual de las acciones y modos del usuario/sistema (menús, paletas).
Existen controles gráficos (widgets) para la selección e introducción de la información.
Permite a los usuarios personalizar la interfaz y las interacciones.
Proporciona flexibilidad en el uso de dispositivos de entrada (teclado/ratón).
Una característica importante es que el GUI permite manipular los objetos e información de la pantalla, no sólo presentarla.
Las GUI tienen el estilo de trabajar en objeto-acción y no acción objeto como lo hacen las CUI, en las GUI primero se selecciona el objeto y enseguida se dicta la acción a realizar, esto diseñado de esta manera ya que para el usuario resulta más natural.
1.4.6 Interfaces de Usuario Orientadas a Objetos (Object Oriented User Interfaces,
O.O.U.I.S.).
Página 9 La tabla 1 nos muestra las diferencias entre estas dos interfaces.
Tabla 1 Principales diferencias entre GUI y O.O.U.I.
El objetivo de O.O.U.I. es que el usuario se concentre en su trabajo a realizar, las O.O.U.I. trabajan en la interacción de objeto-acción, sabemos de antemano que las GUI también lo hacen pero estas también mezclan un poco de acción-objeto, en los O.O.U.I. en lugar de contar con ventanas tenemos visualizaciones contextuales.
Página 10 Un ejemplo de lo que se pretende con una interfaz O.O.U.I. es el considerar un documento como un objeto sobre el cual realizar tareas tales como incorporar gráficos y textos, sin necesidad de usar programas distintos para cada una de ellas. Estos programas suelen tener funciones que se solapan, con el consiguiente gasto extra en espacio.
Actualmente existe una mezcla de productos orientados a la aplicación y al objeto, aunque se está produciendo una migración a estos últimos. Las aplicaciones están dejando paso a conjuntos de objetos.
1.5 Características de los sistemas con interfaces
Todos los sistemas tienden a tener características en común. Todo sistema tiene un objetivo el cual pretende realizar, teniendo ya por hecho que se estarán considerando las especificaciones a satisfacer.
Se pretende que se expongan las especificaciones de lo que se desea antes de realizar el diseño de lo que se desea, tamaño, si es redondo, grande o chico, etc., definir que corresponde a ingeniería y que a diseño ergonómico.
Las funciones operacionales y sus componentes: Se necesita dejar en claro cuáles son las funciones operacionales del sistema a las cuales se les suele llamar organigrama, este consiste en una representación en bloques de un diagrama esquemático, donde cada función se le es asignada a un componente físico o personal.
Al igual existen sistemas en que la correspondencia uno a uno entre funciones y componentes del sistema no puede aplicarse en su totalidad. La ejecución de cualquier función operacional a su vez acarrea típicamente una comunicación de cuatro funciones básicas más que son:
Página 11 recibir información interna por alguna anomalía que se llegue a presentar ya sea mediante un
feedback un sistema de almacenajes.
Los humano perciben mediante los sentidos del tacto, gusto, olfato, etc., pero las máquinas perciben mediante los sensores como son los eléctricos o fotográfico.
Almacenaje de la información: En las personas es la memoria de lo aprendido, y en una máquina se guarda en diferentes componentes físicos y de forma codificada
Procesamiento de la información y decisión: En esta función se realiza la decisión de si se ejecuta la acción o no ya que es aquí donde se toma en cuenta la información recibida y la información almacenada.
Cuando estamos trabajando con máquinas, se realiza un proceso de información y dependiendo de esta la máquina realizara la operación como su programación lo dicta, otras informaciones solicitan el uso de computadoras o circuitos eléctricos.
Funciones de acción: Son las acciones que se decidieron realizar, y son de tipo acción de control físico, como la activación de el manejo, movimiento o alteración de materiales, y tipo acción de comunicación ya sea por la voz, grabaciones entre otros, y estas funciones nos dan como resultado en algunas ocasiones acciones físicas.
1.6 Tipos de sistemas con interfaz hombre máquina
Comenzaremos mencionando las diferencias entre un sistema de bucle abierto y uno bucle cerrado. El sistema de bucle cerrado es continuo el cual también requiere de control, este sistema exige retroalimentación (feedback) para la operación, porque en caso de que exista una
falla el feedback la corregirá.
Página 12 Los sistemas los podemos clasificar por los grados de control que el hombre ejerce sobre la máquina, la tabla 2 nos muestra la manera de clasificar los sistemas con H.M.I.
Tabla 2 Clasificación de Sistemas
Sistemas Manuales:
En este tipo de sistemas el operador es el que realiza la adquisición y la emisión de información para poder controlar el proceso en general, es él quien enciende u apaga el equipo, ayudándose de herramientas manuales y otras pequeñas ayudas.
Sistemas Mecánicos:
Página 13 En este caso la energía la proporciona la máquina y el operador solo controla por medio de mecanismos modificadores, en el proceso la maquinaria a controlar suele estar enlazada por cables, pistas, conductos, etc.
Figura 4 Esquema de una Interfaz para un Sistema Semiautomático
La figura 4 nos muestra como el operador envía información mediante un display, este emitirá señales a las máquinas, estas a su vez emitirán información a los instrumentos de medición, los cuales el operador leerá y dependiendo de la lectura que obtenga, realizara sus acciones de control.
Sistemas Automáticos:
Cuando hablamos de un sistema automatizado, se entiende que el sistema realiza todas las funciones operacionales, emite y recibe información, y de ellas realiza su toma de decisiones y acciones, en este sistema es común que esté totalmente automatizado par tomar medidas y resolver las contingencias que se presenten.
Página 14
1.7 PROTOCOLOS DE COMUNICACIÓN
El protocolo de comunicación son reglas que especifican como se debe de dar el intercambio de información durante la comunicación entre los equipos que forman parte de una red
Los protocolos son reglas de comunicación que permiten el flujo de información entre computadoras distintas que manejan lenguajes distintos, por ejemplo, dos computadores conectados en la misma red pero con protocolos diferentes no podrían comunicarse jamás, para ello, es necesario que ambas "hablen" el mismo idioma, por tal sentido, el protocolo es el encargado de realizar esta función.
Los Sistemas de Comunicación proporcionan una base sobre la cual se desarrollan las estrategias de automatización
Los sistemas de comunicación industrial son mecanismos de intercambio de datos distribuidos en una organización industrial
Intercambio de datos on-line y, en los niveles inferiores de la pirámide (sensores, actuadores, máquinas, células de fabricación, etc.), se exige el requisito de tiempo real.
Intercambio de datos eficiente y de bajo coste temporal y económico
Los procesos de tiempo real requieren una acotación determinista máxima de sus tiempos de ejecución
El objetivo primario del sistema de comunicación es el de proporcionar el intercambio de información (de control) entre dispositivos remotos
Este intercambio de información puede realizarse en base a distintas tecnologías: Comunicación punto a punto analógica
Comunicación punto a punto digital Comunicación punto a punto híbrida Comunicación digital con bus de campo
Página 15 Importancia de las redes industriales
El control tiende a distribuirse.
Los sistemas productivos actuales necesitan un gran flujo de información. Sistemas de información: bases de datos corporativa
Dispositivos gráficos: supervisión, paneles H.M.I. Diagnósticos avanzados
La red de comunicaciones se ha convertido en una parte indispensable en el diseño del sistema de control.
El modelo de red utilizado influye poderosamente en las prestaciones del sistema de control utilizado
1.7.1 Niveles de abstracción
En el campo de las redes informáticas, los protocolos se pueden dividir en varias categorías, las dos más conocidas son el sistema O.S.I. y el T.C.P./IP.
El sistema de rad de nivel O.S.I. se diseño para que los equipo industrial es de diferentes compañías tuviesen la oportunidad de comunicarse entre sí, el sistema O.S.I. cuenta con siete niveles de para realizar la transmisión de datos, tabla 3.
Página 16 El sistema T.C.P./IP fue para ser utilizado por militares, los cuales pretendía crear una
comunicación eficiente, en la cual si algunas de sus nodos fallaban la comunicación no se interrumpiera, siempre y cuando las computadoras emisora y receptora se encontraran encendidas.
EL sistema T.C.P./IP cuenta con 4 niveles para realizar su comunicación en la tabla 4 se pueden visualizar.
Tabla 4 Niveles del Sistema T.C.P./IP
1.7.2 Funciones de protocolo
Funciones más importante: Control de errores: Control de Flujo Control de Congestión Estrategias de encaminamiento Control de Errores:
Protege integridad de los datos del usuario y de los mensajes de control. Control de Flujo y Congestión:
Permite a la red compartir sus recursos entre un gran número de usuarios, entregando a cada uno un servicio satisfactorio sin que sus operaciones corran peligro.
Página 17 Permite optimizar la utilización de los recursos de la red, aumentando la disponibilidad de los servicios de la red al proveer caminos alternativos entre nodos terminales.
1.7.2.1 Funciones del Protocolo
Un proceso recibe un mensaje lo procesa y envía una respuesta, sin que exista relación entre éste evento y otro anterior o posterior.
El proceso origen, conocerá la dirección del proceso destino y la incluirá en el mensaje. Esta dirección, identificará únicamente a un procesador, quién conocerá al proceso destino. El originador cuando despacha un mensaje, entre un estado de espera de respuesta en una de sus puertas.
Figura 5 Estructura Jerárquica de la Comunicación Industrial
Página 18 La respuesta llega al originador, quien realiza un chequeo para asegurarse que viene del lugar correcto antes de aceptarla, luego, pasa al estado "no espera respuesta" en esa puerta de entrada.
Este es un protocolo muy simple, necesita de la sintaxis para definición de formatos de los mensajes y una semántica muy simple.
Debe considerarse el hecho que, la red introduce demoras causadas por congestión, encaminamiento, etc., e incluso puede ocurrir perdida del mensaje.
Para esto, el proceso que realiza la consulta deberá tener un reloj (timer) el que será activado
al enviar el mensaje. El reloj enviara una señal al expirar el tiempo indicado en la activación indicando que la respuesta no llegó en el tiempo esperado por lo que el mensaje deberá ser retransmitido.
1.8 Topologías de red
En la industria las conexiones entre los diferentes dispositivos es mediante redes de comunicación, las cuales tiene diferente topología o formas de conectarse, las topologías de redes existentes son:
Página 19
Página 20
Página 21
2.1 Introducción
Debido a los procesos cada vez más complejos y los cada vez mayores requerimientos a la calidad, la industria de la automatización exige también una transparencia cada vez mayor de las secuencias y procesos de control y de regulación de máquinas e instalaciones.
La nueva era del control ofrece un amplio panorama de sistemas de control y de visualización, empezando por las sencillas unidades de control de texto hasta los PCs industriales. Dentro de las industrias de control nos ofrecen, gráficas, de unidades de control con teclas funcionales o pantallas táctiles, así como de PCs industriales en diversos modelos.
En este capítulo realizaremos el análisis de los diferentes tipos de H.M.I. con Panel View con los que las empresas dedicadas a la fabricación de equipo industrial cuenta, cabe mencionar que solo se baso en la búsqueda en empresas más conocidas en este ámbito.
2.2. SIEMENS
En esta ocasión SIEMENS nos proporcionara equipo que es muy accesible para con respecto a su colocación en diferentes áreas. Los cuales se mencionan a continuación:
Push Button Panels(Paneles de pulsadores)
Los Push Button Panels (PP) una alternativa a los paneles de mando los cuales contaban con
cableado de forma convencional.
Pre-confeccionados para su conexión inmediata, estos paneles con conectividad a bus permiten horros de tiempo en la conexión.
Micro Panels (Micro Paneles)
Estos paneles cuentan con visualizador de textos (T.D.), pantalla grafica, como los paneles de operador (O.P.), con teclado de membrana o pantalla táctil (T.P.).
Página 22 Los paneles móviles permiten manejar y visualizar en el punto donde ocurre todo y con acceso directo y contacto visual con el proceso. Ofrecen la posibilidad de cambiar las conexiones de manera fácil y segura durante el funcionamiento (Mobile Panel 177 y Mobile Panel 277) o bien la libertad de un entorno sin cables, lo cual permite utilizarlos de manera flexible en la máquina o instalación.
Panels(Paneles)
Paneles gráficos con pantalla gráfica para una representación real de los procesos (en color),
bien como panel táctil (T.P.) con pantalla sensible al tacto, bien como panel de mando (O.P.) con teclado de membrana, o bien como combinación táctil/teclas.
Multi-Panels (Multi Paneles)
Serie 270/370
Tanto en la variante con pantalla táctil como con teclado de membrana se utilizan como los paneles convencionales para manejo y visualización. Además, los Multi Panels (M.P.) ofrecen
la posibilidad de instalar otras aplicaciones, permitiendo así, por ejemplo con el P.L.C. por software WinAC M.P., integrar en una misma plataforma varias tareas de automatización.
WinAC M.P. 2007
El P.L.C. por software puede aplicarse en los Multi Panels de las series 270 y 370 (excepto en
el M.P. 370) y es apropiado para procesos complejos en los que deben solucionarse tareas de control y visualización en un equipo.
Thin Client
Los SIMATIC Thin Client son puestos de mando económico y robusto que ofrecen
funcionalidad de panel, en instalaciones grandes y amplias. Se utilizan en aplicaciones cliente servidor.
2.2.1. Beneficios
Página 23 Cuentan con una protección en frente (IP65/NEMA 4), alta compatibilidad electromagnética, resistentes a las vibraciones, los paneles SIMATIC son eficientes para el uso industrial, su compacto tamaño les crea la ventaja de ser colocados en lugares con espacios reducidos
2.2.2. El Software
SIMATIC WinCC es una herramienta homogénea de los SIMATIC Panels, y de la misma manera tenemos un software de visualización WinCC flexible runtime, existen variantes de distinta categoría. La configuración de estos paneles es fácil y eficiente, y las configuraciones pueden ser reutilizadas en los equipos de la misma familia.
2.2.3. Parte de la Totally Integrated Automation
SIEMEN cuenta con un sistema llamado Totally Integrated Automation que es parte del
complemento de SIMATIC WinCC, con este sistema la programación y la gestión de datos reduce los costos de ingeniería.
SIMATIC es un sistema abierto, esto quiere decir que tiene la capacidad de comunicación con equipos de otros fabricantes, ya que cuenta con una extensa gama de drivers muy fáciles de usar.
2.2.4. Manejo y visualización intuitivos
En base a sistema operativo Windows CE los Mobile Panels, Panels y Multi Panels de la serie 70, 170, 270 y 370 ofrecen modernas funciones de manejo y visualización aunadas con características tales como robustez, estabilidad y simplicidad.
Para mayor flexibilidad y apertura al mundo ofimático el hardware y el software ofrecen puertos e interfaces estándar, ej. Para tarjetas multimedia/PC/CF, USB, Ethernet, PROFIBUS D.P., scripts Visual Basic o controles ActiveX personalizables.
Página 24
2.2.5. Características generales de los paneles SIMATIC
En la tabla 5 siguiente nos mostrara el nivel de software con el que cuenta cada panel dependiendo de su categoría.
Tabla 5 Software de configuración de SIMATIC
La tabla 6 siguiente nos muestra con los tamaños de pantalla con los que SIEMENS cuenta y algunas de sus características principales
Página 25 La tabla 7 que a continuación se presenta cuenta con los datos técnicos de cada serie de
paneles con los que SIEMENS cuenta.
Página 27
2.3. Mitsubishi
Figura 6 H.M.I. de Mitsubishi
Mitsubishi en su desarrollo por una visualización en el proceso más amigable, trabaja bajo el concepto de “Visión 1000”. El concepto “Visión 1000”, se compone de tres series de dispositivos
E1000, IPC1000 GOT1000
Los cuales están basados en tecnologías modernas, estos sistemas tienen en común la flexibilidad, son de carácter abierto, son universales y su facilidad de comunicación con todos los productos de Mitsubishi.
Mitsubishi nos muestra en la gama de productos ya mencionados, numerosas ventajas de aplicación
Sencilla manejabilidad y control de los procesos
Clara representación de la secuencia de los procesos tanto en texto como en imagen Creación de informes para el control de la calidad e intercambio de datos de proceso
Página 28 Flexible, abierto y perfectamente compatible con todos los sistemas de automatización
de Mitsubishi
Utilizable universalmente gracias a su compatibilidad con sistemas de otros fabricantes De esta forma mostraremos los equipos de paneles con los que cuenta Mitsubishi.
2.3.1. Serie E (la interfaz entre el hombre y la técnica)
Figura 7 Paneles de la serie E1000 de Mitsubishi
Con la serie E100 Mitsubishi cuenta con 5 dispositivos en el rango de potencia superior, esta serie de equipos cuenta con su amplias posibilidades de comunicación, así como la diversidad de idiomas y el soporte dual de drivers, figura 7 muestra un panel de la serie E.
2.3.1.1 Serie E1000
Página 29 Los equipos de la serie E1000 figura 8, cuenta con características muy modernas, procesadores para aplicaciones complejas, y buena seguridad de datos, displays de alta resolución con 65536 colores, así como buena comunicación y enlaces sencillos gracias a las numerosas interfaces.
Cuentas con las siguientes funciones:
El nuevo diseño ergonómico facilita el manejo
Robusta carcasa de aluminio para duros entornos industriales
Displays T.F.T. de alta resolución con 65536 colores e iluminación de trasfondo regulable para el empleo también en condiciones luminosas extremas
Nueva y potente CPU Intel XScale y Windows CE.NET
Puertos USB para accesorios estándar de PC y para el enlace al PC Ranura para el empleo de tarjetas de memoria Compact-Flash
La serie E1000 está disponible en estos momentos en cinco modelos diferentes, las cuales se basan en su tamaño formas de controlar, 6,5", 10,4" y 15" con pantalla táctil y en el modelo de 6,5" y 10,4" con manejo mediante teclado.
2.3.1.2 Serie MAC E
Página 30 En la Serie Mac E en la figura 9, contamos con diplays que se adapta a las indicaciones del usuario, esto nos da como opción el poder sustituir a un pupitre de mando.
Podemos realizar modificaciones de una manera sencilla en los datos del proceso, con la serie Mac E tenemos una adaptación óptima a los controles de Mitsubishi.
Esta serie cuenta con las siguientes funciones
Manejo convencional mediante teclas con soporte de texto o pantalla táctil Procesamiento de recetas mediante teclado o mediante pantalla táctil y P.L.C. Varios idiomas para las aplicaciones y para el software de programación
Controlador (driver) para todos los P.L.C.`S de MELSEC, así como controladores para otros fabricantes, también en el modo Dual Driver
Soporte Unicode Tecnología I.T. (S.M.S., email, FTP, servidor de red)
La serie MAC E ofrece una amplia paleta de unidades de control para las aplicaciones más diversas.
2.3.2. Serie de Terminales Graficas de Operaciones (G.O.T.)
Figura 10 Paneles de la serie G.O.T.
La serie G.O.T. (figura 10) se caracterizan por contar con fáciles indicaciones y una entrada sencilla mediante la superficie táctil, cuenta con funciones como:
Página 31 Unidades de control completamente gráficas
Entrada mediante la pantalla táctil y/o mediante teclado tradicional Representación analógica de valores de proceso
Procesamiento de recetas Función de diagnóstico P.L.C.
Enlace de todos los P.L.C.`S de MELSEC y drivers disponibles para dispositivos de otros fabricantes
2.3.2.1 GT1020/GT1030
Figura 11 Paneles de la serie GOT1000
Los dispositivos de la serie GOT1000 cuentan con materia de potencia, representación gráfica y funcionalidad en una carcasa atractiva y especialmente compacta y robusta. La figura 11 se visualiza el equipo físico.
La serie de los Micro G.O.T. cuenta con los GT1020/1030, presentándose con una pantalla LCD monocromática de 3,7 o 4,5 pulgadas, con pantalla táctil y retro iluminación tricolor para aplicaciones numerosas, esta serie es pequeña en cuanto a tamaño pero con grandes capacidades.
Página 32 y rojo. Esta función es posible ocuparla de modo que cuando el equipo esté funcionando de manera adecuada se tenga un color verde y rojo como señal de advertencia.
Tienen procesamientos de recetas y alarmas, para memorizar o intercambiar datos con una computadora, la memoria integrada almacena 4000 direcciones.
Cuenta con sistema de protección con contraseña, también funciones como indicación grafica, representación de datos, funciones de temporización y una alta velocidad de procesamiento. Los GT1020/1030 pueden mostrar varios idiomas con distintas grafías para una gran cantidad de países.
Cuenta con conexión para la computadora por la parte posterior del G.O.T., donde el usuario puede depurar y modificar y ordenarse en series de programa. Características generales:
Compatible con Unicode 2.1
Numerosas posibilidades de montaje
Conexión para el intercambio de datos con un P.L.C. Interfaz para PC
Conexión múltiple económica Controlador de comunicación
Pre-instalado OS con F.X. P.L.C. driver (ascendente con G.T. Designer2)
Página 34
2.3.2.2 Serie GOT1000
Figura 12 Panel de la serie GOT1000
La serie GOT1000 (figura12) intenta satisfacer las necesidades del usuario, facilitando la interacción entre el hombre y la máquina empleando la tecnología de punta. Entre las especificaciones generales se cuenta con:
Displays de alta resolución con hasta 65536 colores también para representaciones complejas
Puerto USB en la parte delantera de las unidades de control
Transferencia y soporte de los datos de proyecto con tarjeta de memoria Compact-Flash
Multilingüe mediante Unicode 2.1
Esta serie comprende 4 modelos conectables a rede en tamaños 8.4, 10.4 y 12.1 pulgadas, y dos modelos diseñados para comunicación serial con un display más pequeño de 5.7 pulgadas en colores blanco y negro.
Página 35 Tabla 10 Funcionalidad básica de las pantallas
2.3.2.3 Serie GOT900
Página 36 El manejo de la serie GOT900 (figura 13) es sencilla en conjunto de una máxima funcionalidad y espacio minio. El display nos ayuda a representar secuencias de la máquina, las cuales son asignadas por el personal de operación.
Los dispositivos permiten la programación libre de pantallas, así como funciones estándar. Cuenta con la capacidad de guardar máximo 500 pantallas, de las cuales es posible visualizar libremente 3 pantallas diferentes una sobre otra .Los productos que a continuación se presentan son de la serie GOT900, la tabla 11 como en las anteriores nos muestra sus características principales.
Página 37
2.3.3. IPC industriales
Figura 14 Monitores IPC
La serie IPC1000 está diseñada para ser utilizada en cualquier área de la planta de producción, ya que aguantan condiciones duras y desfavorables.
El software con el nombre MELSOFT, soporta los IPC, Mitsubishi ofrece varios componentes de software al cuales se le puede integrar paquetes completos de visualización, como los tipo scada. Estas IPC se integran de las siguientes características.
Vista general de las características del producto: Gran selección de modelos
Diseños acreditados
Aparatos robustos para condiciones extremas Valen para cualquier aplicación
Página 38 Tabla 12 Modelos de las serie IPC
2.3.4 Software
MELSOFT es el programa base de la visualización para la automatización de Mitsubishi con el cual es posible aplicar de forma rápida y fiable de soluciones
2.3.4.1 Visualización
Página 39 encontrar en H.M.I. como una sencilla interfaz, hasta un complejo software de control de procesos MX4-scada
2.3.4.2 MX-Componentes
Contiene la herramienta ActiveX la cual nos ayuda a unir sin problema alguno a los P.L.C.`S de Mitsubishi con las computadoras, y para ello no es necesario crear complejos protocolos de comunicación, MX es ideal para las aplicaciones que requieren conexión con un P.L.C.
2.3.5 Programación
2.3.5.1 E Designer
El software E Designer le permite al usuario crear aplicaciones sencillas para los paneles de la serie MAC E. La función de administrador de bloques nos visualiza un grafica completa sobre el proyecto, designer soporta todas las funciones de Windows para la edición, además de las de documentación y memorización.
2.3.5.2 G.T. Works
El software GOTWorks es la programación para la serie G.O.T. de Mitsubishi, el cual incluye funciones de procesamiento de la superficie de operación, la comprobación de errores, la ayuda online y la documentación del programa, lo cual permite una sencilla ejecución del usuario conforme al entorno de Windows.
2.3.5.3 Software MELSOFT - G.T. Works
Página 40
2.3.5.3.1 Funciones
Simulación G.O.T. y P.L.C. integrada en el PC - no es necesario ningún hardware para la comprobación.
Soporta todos los dispositivos GOT9000 y GOT1000.
Gran biblioteca gráfica de objetos; actualizaciones disponibles gratuitamente en Descarga / Actualizaciones de software.
2.4 Schneider
Figura 15 Pantallas Táctiles de Schneider
La familia con la que Schneider la cual se puede ver en la figura 15 cuenta con terminales graficas Magelis XBT GT las cuales las podemos encontrar en diferentes tamaños de 3.8, 5.7, 10.4, 12.1 y 15 pulgadas, combinan funcionalidad y rendimiento para mejorar la productividad, son compactas, simples y robustas.
Página 41
2.4.1 Magelis XBT GT
Facilidad de programación y uso
Gran visibilidad con la pantallas tipo T.F.T. 65 536 colores, STN 4 096 con opción de color o Monocromática 8/16 escalas de grises, según el modelo.
Teclado analógico
Ajustes de brillantes y contraste
Multi-ventanas con pop-up hasta 40 fuentes (latín, japonés, chino, etc.) Facilidad en la puesta en servicio y programación
Compacta
Montaje sencillo, no requiere herramientas
Puertos USB para conectar sus periféricos, e incrementar sus conexiones, y ahorrar tiempo en la transferencia de información
Tarjeta Compact flash con capacidad de hasta 1Gb Intercambiable con los modelos XBTG
Numerosos puertos de comunicación (serial, USB, Ethernet,...) Multi-enlace en todos los puertos de comunicación
Novedades multimedia
Visualización y grabación de imágenes cámaras de video incluyendo grabación de audio.
Visualización remota de su aplicación en un buscador de internet.
2.5. Rockwell Autmation (Allen Bradley)
Rockwell Automation nos muestra una visión general de las pantallas táctiles con las que
Página 42
2.5.1. Comencemos describiendo los Paneles View plus 400 y 600
Esta serie la podemos encontrar en tamaños de 4 0 6 pulgadas, incluye modulo de lógica, memoria y alimentación de corriente (AC o D.C.) en la parte inferior del equipo.
El Panel View plus 400 tiene una presentación con matices grises de fondo (320 x 240) con teclado numérico, o también se encuentra a color pantalla táctil y teclado numérico.
El Panel View plus 600, el cual también se encuentra con matices gris de fondo (320 x 240), o a color con teclado numérico o pantalla táctil.
El mecanismo de montaje requiere de un corte de dado sencillo sin herramientas especiales. Cuenta con comunicación de la unidad RS-232, puerto USB, Ethernet, una ranura compact flash para transferencia de archivos y registro de datos. Estas unidades soportan un enlace de red para módulos de comunicación opcional (DH-485, ControlNet, DeviceNET).
Para las comunicaciones con los presupuestos limitados que requiere comunicación de P.L.C. básica, contamos con el puerto RS-232 o las ranuras de DH485, también para la comunicación contamos con el puerto de Ethernet.
Esta unidad proporciona comunicación simultánea con redes múltiples para el control distribuido.
Se especificara resumidamente a detalle lo que la terminal de cada equipo. El Panel View más 400 y 600 terminales se ofrecen:
Unidad base de configuración Módulos de comunicación.
Fuente de alimentación de AC o D.C..
Página 43 Figura 16 Panel View con pantalla táctil
Los equipos de Panel View plus 400 y 600 junto con sus terminales, son los dispositivos de una H.M.I., con los cuales obtenemos diversas características.
Panel View más 400 terminales
Graficas a color en matices de gris
Teclado numérico o teclado numérico con pantalla táctil Panel View más 600 terminales
Graficas a color en matices de gris
Teclado numérico o teclado numérico con pantalla táctil Unidad configuración
RS-232 sólo
RS-232, Ethernet, y comunicaciones del módulo interactúan
Los módulos de comunicación nos informan de los equipos que serán añadidos a cada una de nuestras entradas y de esta forma poder interactuar con el equipo
Potencia alimentadora, AC ( 85…264V ) o D.C. ( 18…30V )
La ranura de la tarjeta de Compact Flash, la cual nos ayuda a actualizar el panel
Página 44 Mismos recortes de panel como las 550 terminales de norma de Panel View, en la figura 18 se pueden visualizar las conexiones.
Figura 17 Entradas de y ranuras de comunicación de Panel View Plus 400 o 600
Se puede lograr una mejor eficiencia en cuanto a la capacidad de comunicación, mediante la unión de un modulo de comunicación con un enlace de red de la unidad de configuración del Panel View Plus 400 y 600, y eso se logra con estas redes:
DH-485 DH+
Remoto yo/o (percha sencilla) Aislado RS-232
DeviceNet ControlNet
2.5.2. Panel View Plus 700 a 1500
Página 45 También cuentan con equipo reemplazable 6.5, 10.4, 12.1 y 15.1 pulgadas con teclado numérico como la figura 19 se visualiza o pantalla táctil, cuenta con opciones de cubierta antideslumbrante para las diferentes condiciones ambientales en las que se desea colocar el panel.
El diseño de instalación es fácil, los cuales pueden ser instalados con el esfuerzo mínimo usando un desatornillador.
Resumiendo los equipos cuentan con:
El módulo de lógica viene norma con estas características. Ethernet y RS-232 puertos de comunicación incorporados Dos puertos de USB para ratón y apoyo de teclado
Entrada de alimentación, AC o D.C.
Enlace de red para el módulo de comunicación opcional
Ranura de Compact Flash para transferir archivos, datos de tala, o actualizaciones de sistema
El modulo de lógica lo tienen disponible con o sin compact flash y lo que diferencia un Panel View Plus de un Panel View Plus CE es el contenido de la compact flash
Figura 18 Panel View plus con teclado numérico
Página 46 Factory Talk para crear aplicaciones y que las terminales corran junto con el programa se obtiene por separado
El entorno de Windows CE.NET hace que la interfaz del programa Panel View Plus CE sea más familiar con el usuario.
De la misma manera que el sistema de Windows Ayuda con la plataforma CE.NET haciendo funcionar el apoyo de dispositivos del sistema operativo CE.NET
Windows CE.NET sistema operativo proporciona los programas siguientes:
Los espectadores de archivo para la oficina de MS: Excel, palabra, PowerPoint espectador de archivo P.D.F.
editor de texto de Teclado aplicación de Web Server servidor de FTP
Apoyo para el marco de acuerdo de .NET
Algunas de las aplicaciones anteriores de software son incluidas en el Panel View más accesorio de CE CD.
Aquí se mostrara una visión resumida del Panel View 700, 1000, 1250, 1250H y 1500 Componentes del módulo
Página 47 Figura 19 Penel`s View de las Series 700 a1500
El Panel View Plus 700 a 1500 (figura 20) son dispositivos para H.M.I. que ofrecen las siguientes características:
Los módulos de exhibición de color gráficos con teclado numérico, pantalla táctil, o teclado numérico con pantalla táctil
La pantalla táctil resistiva de la palabra análoga Las comunicaciones de Ethernet y de serial
El enlace de comunicación del módulo para la capacidad añadida fácil
Los módulos de expansión de memoria para las actualizaciones de campo para 256MB RAM y 512MB Compact Flash
Potencia alimentadora, AC ( 85…264V AC ) o D.C. ( 18…32V D.C. ) La tarjeta de Compact Flash ranura apoyos represente
Los puertos de USB proporcionan conexiones para teclado, ratón, e impresor Biseles reemplazables de campo
Página 48
2.6. Selección del equipo
Para la selección del equipo de la H.M.I. se realizaran criterios de selección, dependiendo de las características del driver, para así no tener problemas con lo que a su comunicación y funcionamiento se refiere.
Como primer punto y más importante se decidió trabajar con un Panel View Plus 1000, dado que el equipo fue proporcionado por parte de la escuela, para así poder trabajar de una manera más productiva, y así tener conocimientos tanto teóricos como prácticos.
El driver que se va controlar tiene un numero de catalogo 2098-DSD-010-SE, con este número se puede verificar que el tipo de comunicación que trabaja este driver es vía serial y comunicación sercos, por lo tanto la forma en que se va a controlara el driver será por puerto serial, ya que la comunicación sercos en el ultra solo es para las sincronización de ejes con equipos Compact Logix o Control Logix
Por consecuente se necesita que la H.M.I. incluya puerto serial.
Para el control del servo driver vía serial se necesita conocer sus comandos de comunicación ASCII, estos comandos los podemos obtener del documento Ultra 3000 Host Commands for Serial Comunication con numero de publicación 2098-RM003A-EN-P octubre 2001, en
donde se detalla el diseño, la programación y localización de los comandos ASCII para la comunicación serial con el Ultra 3000.
Basándonos en la nota de aplicación con número de publicación 2098-AT010A-EN-P Noviembre 2004 la cual se fundamenta en la comunicación de un Ultra 3000 con una H.M.I.
de Allen Bradley, y que detalla lo requerido para hacer esta comunicación como los software necesitados que son el KePServer versión 4.0 y el RS View ME versión 3.0 o superior, además de que incluye el archivo de configuración del puerto serial del Ultra3000.
Página 49 puerto serial del ultra 3000, el cual está configurado con el KepServer, que a su vez este será acoplado con el RS ViewME.
Página 50 La tabla comparativa, describimos una de las opciones por las cuales se selecciono el equipo del Panel View Plus 1000.
Tabla 13 Tabla Comparativa de H.M.I.’S
MARCA Tamaño
(plg.)
Comunicación PC-H.M.I.
Pantalla Memoria Flash
Comunicación
H.M.I.-P.L.C. H.M.I.-Drive
SIEMENS
5.7 7.5
Serial (R.S. 232) USB Ethernet Táctil Teclado 2048 KB 6 MGB
Serial (R.S. 232) USB Ethernet
MITSUBISHI
3.7 4.5
Serial (R.S. 232)
Táctil Teclado
Serial (R.S. 232) R.S. 422 SCHNEIDER 3.8 5.7 10.4 12.1 15 USB
Serial (R.S. 232) Ethernet
Teclado 1 G
Serial (R.S. 232) USB Ethernet ALLEN BRADLEY 6.5 10.4 12.1 15.1 Ethernet Serial (R.S. 232)
Táctil Teclado
256 MG 512 MG
Serial (R.S. 232) Ethernet
Página 51
Capítulo III: Instalaciones Típicas del
Página 52
3.1. Introducción:
El ambiente peligroso de las localizaciones y la instalación al aire libre Las dimensiones del recorte del panel
Las separaciones de las herramientas los equipos 1000 Localizaciones peligrosas
Dimensiones de un producto
3.2. La pantalla táctil
Todas las exhibiciones de la pantalla táctil son resistente y similares, a excepción de tamaño (es importante saber que la pantalla táctil puede funcionar con un dedo, o una pluma para pantallas táctiles en el caso de usar otro objeto este dañara la pantalla).La pantalla táctil de la figura 21 es la pantalla que se ocupara.