Lazo de control de corriente para un motor de corriente directa aplicando un observador de estado
69
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA “Lazo de control de corriente para un motor de corriente directa aplicando un observador de estado.” Autor: Carlos Ernesto Peña Goyas E-mail: [email protected]. Tutores: MSc. Orlando Regalón Anias E-mail: [email protected] [email protected]. Ing. Leisis López Rodríguez. Santa Clara 2016 "Año del 58 Aniversario de la Revolución.".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. La inteligencia consiste no sólo en el conocimiento, sino también en la destreza de aplicar los conocimientos en la práctica.. Aristóteles.
(5) ii. DEDICATORIA. A mis padres, por habérmelo dado todo en la vida, A mis abuelos, por su cariño, A mi tía por su amor, cariño y dedicación, A mi hermana, por su apoyo, A mi familia por el apoyo que me han brindado, A mis amigos, Gracias a todos por existir..
(6) iii. AGRADECIMIENTOS. A mis padres que me han dedicado su vida y me han apoyado durante todos estos años. A mi familia porque todos de una forma u otra han contribuido en el camino hasta llegar aquí. A mi novia que me ha acompañado durante el largo y duro camino de la universidad y ha estado conmigo siempre. A mi tutor por su tiempo, dedicación y confianza. A mis amigos y compañeros que compartieron siempre mis alegrías y tristezas, especialmente a Julio, Rogelio y Yasser. A todos los profesores que han puesto un granito de arena en mi formación profesional. A todos los que me ayudaron de una forma u otra. A todos ellos, ¡sinceramente GRACIAS!!!.
(7) iv. RESUMEN. Un esquema de control muy empleado en los accionamientos con motores de corriente directa consiste en el control en cascada de la velocidad con lazo interno de corriente. Para ello es necesario medir la velocidad del conjunto motor-carga y la corriente de armadura del motor. Por diversas razones prácticas no siempre es posible o técnicamente factible medir y realimentar la corriente. En este trabajo se presenta el diseño y validación experimental de un observador de estados para estimar la corriente de armadura. Se valida el estimador de corriente y se emplea para implementar el control del lazo interno de corriente, en el control en cascada de la velocidad del motor. La corriente estimada se utiliza además para determinar posibles sobrecargas en el accionamiento..
(8) v TABLA DE CONTENIDOS. PENSAMIENTO ....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ....................................................................................................... iii RESUMEN ...........................................................................................................................iv INTRODUCCIÓN ................................................................................................................. 1 Organización del informe ................................................................................................ 3 CAPÍTULO 1. FUNDAMENTOS TEÓRICOS .................................................................. 4 1.1. Aspectos Teóricos ................................................................................................. 4. 1.1.1. Justificación del trabajo ................................................................................. 4. 1.1.2. Solución al problema ..................................................................................... 4. 1.2. Accionamientos de velocidad variable (AVV) ................................................... 4. 1.2.1. Accionamiento de corriente alterna (CA) ................................................... 5. 1.2.2. Accionamiento de corriente continua (CC) ................................................ 5. 1.3. Motor de corriente continua ................................................................................. 5. 1.3.1. Principio de funcionamiento ......................................................................... 6. 1.3.2. Tipos de motores de corriente continua ..................................................... 7. 1.3.3. Aplicaciones y ventajas de los motores de corriente continua ............... 9. 1.4. Alternativas de control de velocidad en motores de corriente directa ........ 10. 1.4.1. Control por tensión variable........................................................................ 10. 1.4.2. Control de velocidad por tensión de rotor ................................................ 11. 1.4.3. Control de velocidad de un motor con excitación serie ......................... 11. 1.4.4. Control de velocidad por excitación Shunt............................................... 12.
(9) vi 1.5. Modelos matemáticos dinámicos ...................................................................... 13. 1.5.1. Función de transferencia ............................................................................ 13. 1.5.2. Espacio de estado........................................................................................ 15. 1.6. Modelos matemáticos del motor de CD controlado por armadura .............. 19. 1.6.1. Obtención del sistema en espacio de estados ........................................ 19. 1.6.2. Modelado matemático para la obtención de la función transferencial. del sistema .................................................................................................................. 21 1.7. Control en cascada ............................................................................................. 21. 1.7.1. Cuándo usar control en cascada ............................................................... 23. 1.7.2. Control en cascada para motores de CD ................................................. 23. CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS ....................................................................................... 25 2.1. Alimentación del motor de CC. Convertidores CA/CC ..................................... 25 2.1.1. Clasificación de los convertidores CA/CC................................................ 25. 2.2. Esquema del experimento ................................................................................. 26. 2.3. Medición de los parámetros del motor ............................................................. 28. 2.3.1. Cálculo de Ra, La y Kϕ................................................................................ 29. 2.3.2. Identificación experimental para el cálculo de J ..................................... 31. 2.3.3. Calculo de F .................................................................................................. 35. 2.4. Diseño del observador de estados ................................................................... 36. 2.4.1. Validación del observador mediante simulaciones ................................. 39. 2.5. Propuesta de la estrategia de control .............................................................. 40. 2.6. Diseño del observador en tiempo discreto ...................................................... 43. 2.6.1. Simulaciones en tiempo discreto ............................................................... 44.
(10) vii CAPÍTULO 3. IMPLEMENTACIÓN PRÁCTICA DE LA ESTRATEGIA DE CONTROL .............................................................................................................................................. 46 3.1. Implementación práctica ..................................................................................... 46. 3.2. Implementación real del observador en el Simulink ....................................... 47. 3.3. Control en cascada del motor............................................................................ 49. CONCLUSIONES Y RECOMENDACIONES ................................................................ 52 Conclusiones .................................................................................................................. 52 Recomendaciones ......................................................................................................... 53 REFERENCIAS BIBLIOGRÁFICAS................................................................................ 54 ANEXOS .............................................................................................................................. 55.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN Un accionamiento eléctrico es un sistema capaz de convertir la energía eléctrica en mecánica, de forma útil y controlando los parámetros implicados, como la velocidad, posición o par. En la actualidad la mayoría de los motores de la industria son manejados de forma directa desde las líneas de distribución eléctrica, ya sean motores de corriente continua (CC) o corriente alterna (CA). Debido a esto el comportamiento del motor depende de la naturaleza de la carga acoplada al eje de la máquina. Para el caso de una carga liviana el motor desarrolla una velocidad relativamente alta y un par de giro bajo, pues es el requerimiento de la carga. Por el contrario, si se dispone de una carga pesada o difícil de mover, el motor se moverá a una velocidad menor y entregara más par, pues una mayor carga lo exige. Al conectar directamente el motor a la red eléctrica CA o CC se define su comportamiento y este se mantendrá inalterable para determinado voltaje fijo en la línea de suministro eléctrico. No obstante, en gran parte del sector industrial, existen procesos en los cuales se requiere del manejo de las características de operación de dichas máquinas, por lo cual se emplean dispositivos de control de parámetros tales como los variadores de velocidad y frecuencia. En el caso de los motores CA dichos dispositivos son de uso común y poseen un costo relativamente bajo, sin embargo, cuando se trabaja con motores CC los variadores de velocidad poseen un costo excesivamente elevado lo cual los hace poco accesibles a muchas industrias que requieren de su uso. El proyecto pretende desarrollar un sistema de control de velocidad para cualquier motor CC que lo requiera, aplicable a cualquier tipo de máquina, de fácil uso e implementación en todo tipo de proceso industrial. Cuando se pretende diseñar un sistema de control se asume la disponibilidad de medición de las variables de estado y muchas veces esto no es posible, debido a factores físicos, complejidad de medición o costos de medición. Por esto, se han.
(12) INTRODUCCIÓN. 2. diseñado algoritmos que permiten la estimación de uno o algunos estados no medibles partiendo de las mediciones de la entrada y salida del sistema dinámico. Una de las técnicas más utilizadas de control es la realimentación de variables de estado. En los sistemas reales no es posible tener acceso a todas las variables de un proceso en particular, sin embargo estas pueden ser estimadas usando un observador. Para el diseño de este existen restricciones, ya que es necesario conocer completamente el modelo de espacio de estados del sistema que se desea controlar, y eso plantea limitantes pues esta técnica no puede ser aplicada sobre sistemas de parámetros desconocidos. El control en cascada de motores de corriente directa con lazo interno de corriente es un esquema muy utilizado, para ello es necesario medir la velocidad del conjunto motor-carga y la corriente de armadura del motor. Por diversas razones prácticas no siempre es posible o técnicamente factible medir y realimentar la corriente. Por lo anterior expuesto, se plantean los siguientes objetivos para la realización del trabajo. Objetivo general Realizar el control de velocidad de un motor de corriente continua (directa) utilizando un observador de estado para estimar la corriente de armadura. Objetivos específicos Identificar en la literatura especializada las estrategias de control de velocidad en motores de corriente continua y observadores de estados. Diseñar un observador de estados para estimar la corriente de armadura de un motor de CC. Proponer una estrategia de control en cascada a partir de la corriente estimada. Validar mediante simulaciones el comportamiento de la estrategia de control. Validar la implementación práctica del sistema de control propuesto..
(13) INTRODUCCIÓN. 3. Organización del informe El presente trabajo de diploma constará de tres capítulos. En el capítulo uno se ofrece una breve descripción del funcionamiento de los motores de corriente continua (CC), se plantea el problema a resolver y una justificación para la realización del trabajo. Además, se abordan los principales aspectos teóricos relacionados con los observadores de estado y las diferentes alternativas de control de velocidad en motores CC. En el capítulo dos se conocen las principales herramientas empleadas para la realización del trabajo, exponiendo sus principales características y las ventajas de la utilización de las mismas. Se explican además como fueron llevados a cabo cada uno de objetivos del trabajo. En el tercer y último capítulo se exponen los resultados finales del trabajo, como la validación en un motor real tanto del observador de estados como del lazo de control en cascada utilizando la estimación de corriente para la realimentación en el lazo interno..
(14) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 4. CAPÍTULO 1. FUNDAMENTOS TEÓRICOS En el presente capítulo se realiza una breve descripción acerca de los diferentes accionamientos de velocidad variable (corriente alterna o directa), además se plantea la justificación del trabajo. También se exponen brevemente las principales características de los motores de corriente continua (CC) así como su principio de funcionamiento. Se dan a conocer algunos aspectos esenciales acerca de los observadores de estado y sobre el control en cascada para motores de corriente directa. 1.1 Aspectos Teóricos Los aspectos teóricos que serán tratados a continuación, son necesarios para comprender la importancia que tiene la realización de este trabajo. 1.1.1 Justificación del trabajo Un esquema de control muy empleado en los accionamientos con motores de corriente directa consiste en el control en cascada de la velocidad con lazo interno de corriente. Para ello es necesario medir la velocidad motor y la corriente de armadura, por diversas razones prácticas no siempre es posible medir y realimentar la corriente. 1.1.2 Solución al problema La situación del problema que se presenta es cómo implementar un lazo de control en cascada para un motor de corriente directa con excitación independiente, sin la posibilidad de medir la corriente de armadura en el lazo interno. Para ello se propone la realización de un observador de estados mediante el cual tengamos una aproximación lo más cercana posible a la corriente que circula por la armadura del motor. Este observador de corriente nos permitirá utilizar sus estimaciones para la implementación del lazo interno así como la determinación de posibles sobrecargas en el accionamiento. 1.2 Accionamientos de velocidad variable (AVV) En el caso de los AVV mecánicos o hidráulicos, el equipo de control se encuentra entre el motor y la máquina de trabajo, lo cual significa que el mantenimiento es muy dificultoso. En los AVV eléctricos, los sistemas de control se hallan en una sala de.
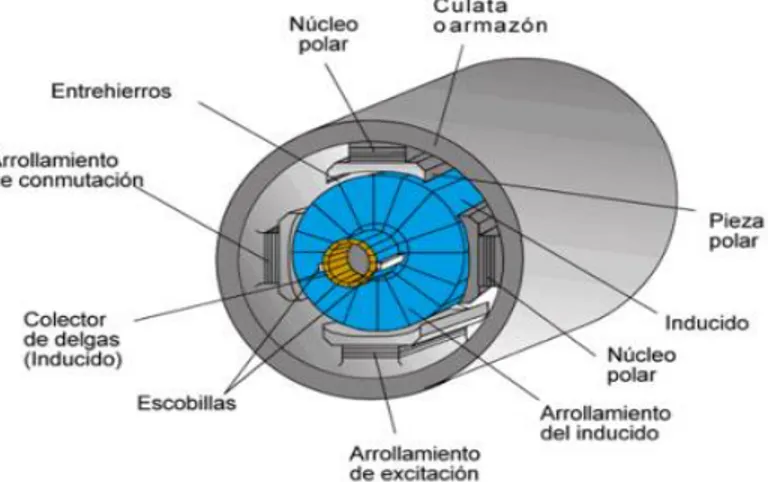
(15) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 5. equipamiento eléctrico y sólo el motor de accionamiento se encuentra en el área de procesos, pero ésta es tan sólo una de las ventajas de los AVV eléctricos (ABB Sistemas Industriales, 2000). 1.2.1 Accionamiento de corriente alterna (CA) En el accionamiento de CA, se utiliza un motor de jaula de ardilla estándar. En estos motores la velocidad depende del número de polos (por lo general fijados en el momento de la fabricación) y de la frecuencia de la alimentación de CA. En la actualidad la velocidad del motor se regula con un convertidor de frecuencia que cambia la frecuencia y la tensión del motor. El convertidor de frecuencias es controlado por señales eléctricas. 1.2.2 Accionamiento de corriente continua (CC) En este accionamiento, un convertidor de CC cambia la tensión de alimentación suministrada al motor de CC. En el motor se convierte la energía eléctrica en movimiento mecánico de rotación. Los accionamientos de corriente directa (CD) siguen siendo muy utilizados cuando se requiere una gran exactitud en la regulación y suavidad del control. 1.3 Motor de corriente continua Los motores son sistemas capaces de transformar un cierto tipo de energía entrante en energía mecánica o movimiento. La energía de entrada puede ser de diferentes tipos: derivados del petróleo, gas natural, carbón o electricidad entre otras. Según sea este tipo energía de entrada se obtendrán los diferentes tipos de motores existentes. Uno de ellos es el motor eléctrico, que es un sistema capaz de transformar la energía eléctrica en energía mecánica o viceversa (K. T. Chau, C. C. Chan and L. Chunhua, 2008). Un motor de corriente continua es aquel que trabaja o se alimenta de corriente continua. Están formados generalmente por las siguientes partes, que se muestran en la Figura 1.1 (Oloarte, 2011): a. Inductor o estator (enrollado de excitación): Es un electroimán formado por un número par de polos. Las bobinas que los arrollan son las encargadas de producir el campo inductor al circular por ellas la corriente de excitación..
(16) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 6. b. Inducido o rotor (enrollado de armadura): Es una pieza giratoria formada por un núcleo magnético alrededor del cual va el devanado de inducido, sobre el que actúa el campo magnético. c. Colector de delgas: Es un anillo de láminas de cobre llamadas delgas, dispuesto sobre el eje del rotor que sirve para conectar las bobinas del inducido con el circuito exterior a través de las escobillas. d. Escobillas: Son unas piezas de grafito que se colocan sobre el colector de delgas, permitiendo la unión eléctrica de las delgas con los bornes de conexión del inducido. Al girar el rotor, las escobillas van rozando con las delgas, conectando la bobina de inducido correspondiente a cada par de delgas con el circuito exterior.. Figura 1.1 Motor de corriente directa.. 1.3.1 Principio de funcionamiento El principio de funcionamiento de los motores eléctricos de corriente directa o continua se basa en la repulsión que ejercen los polos magnéticos de un imán permanente cuando, de acuerdo con la Ley de Lorentz, interactúan con los polos magnéticos de un electroimán que se encuentra montado en un eje. Este electroimán se denomina “rotor” y su eje le permite girar libremente entre los polos magnéticos norte y sur del imán permanente situado dentro de la carcasa o cuerpo del motor (Oloarte, 2011)..
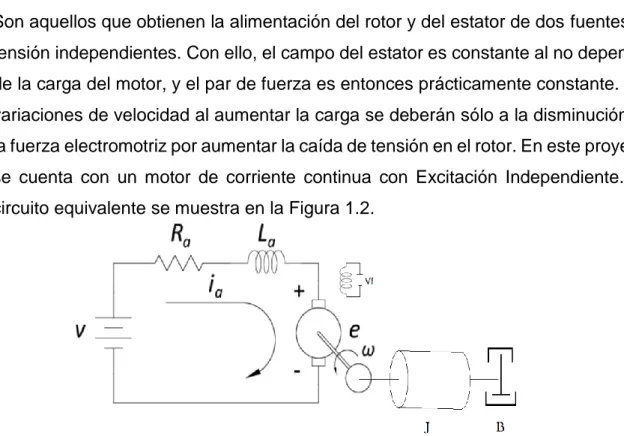
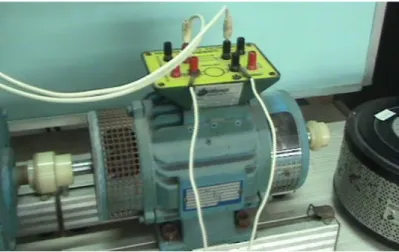
(17) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 7. Cuando la corriente eléctrica circula por la bobina de este electroimán giratorio, el campo electromagnético que se genera interactúa con el campo magnético del imán permanente. Si los polos del imán permanente y del electroimán giratorio coinciden, se produce un rechazo y un torque magnético o par de fuerza que provoca que el rotor rompa la inercia y comience a girar sobre su eje en el mismo sentido de las manecillas del reloj en unos casos, o en sentido contrario, de acuerdo con la forma que se encuentre conectada al circuito la fuente de alimentación. 1.3.2 Tipos de motores de corriente continua De excitación independiente Son aquellos que obtienen la alimentación del rotor y del estator de dos fuentes de tensión independientes. Con ello, el campo del estator es constante al no depender de la carga del motor, y el par de fuerza es entonces prácticamente constante. Las variaciones de velocidad al aumentar la carga se deberán sólo a la disminución de la fuerza electromotriz por aumentar la caída de tensión en el rotor. En este proyecto se cuenta con un motor de corriente continua con Excitación Independiente. Su circuito equivalente se muestra en la Figura 1.2.. Figura 1.2 Circuito equivalente del motor CC con excitación independiente acoplado a una carga.. Para el desarrollo de este trabajo se experimentó con un motor de corriente directa, excitación independiente perteneciente al kit de laboratorio Alecop, existente en las universidades cubanas, el mismo se muestra en la Figura 1.3. El motor tiene los siguientes datos de chapa: Un=220 V, In=3 A, Nn=1800 rpm Uexc=220 V, Iexc = 2.75 A.
(18) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 8. Figura 1.3 Motor de corriente directa con excitación independiente utilizado en el experimento.. De excitación en derivación El devanado de inducido e inductor están conectados en paralelo y alimentados por una fuente común. También se denominan máquinas Shunt, y en ellas un aumento de la tensión en el inducido hace aumentar la velocidad de la máquina (Garces and Gaviria, 2014). De excitación en serie Los devanados de inducido y el inductor están colocados en serie y alimentados por una misma fuente de tensión. En este tipo de motores existe dependencia entre el par y la velocidad; son motores en los que, al aumentar la corriente de excitación, se hace disminuir la velocidad, con un aumento del par. De excitación compuesta También llamados compound, en este caso el devanado de excitación tiene una parte de él en serie con el inducido y otra parte en paralelo. El enrollado en serie con el inducido está constituido por pocas espiras de gran sección, mientras que el otro está formado por un gran número de espiras de pequeña sección. Permite obtener por tanto un motor con las ventajas del motor serie, pero sin sus inconvenientes. Sus curvas características serán intermedias entre las que se obtienen con excitación serie y con excitación en derivación. Existen dos tipos de excitación compuesta. En la llamada compuesta adicional el sentido de la corriente que recorre los enrollados serie y paralelo es el mismo, por.
(19) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 9. lo que sus efectos se suman, a diferencia de la compuesta diferencial, donde el sentido de la corriente que recorre los enrollados tiene sentido contrario y por lo tanto los efectos de ambos devanados se restan (Garces and Gaviria, 2014). 1.3.3 Aplicaciones y ventajas de los motores de corriente continua Aunque el precio de un motor de corriente continua es considerablemente mayor que el de un motor de inducción de igual potencia, existe una tendencia creciente a emplear motores de corriente continua en aplicaciones especiales. La gran variedad de la velocidad, junto con su fácil control y la gran flexibilidad de las características par-velocidad del motor de corriente continua, hacen que en los últimos años se empleen estos cada vez más con máquinas de velocidad variable en las que se necesite amplio margen de velocidad y control fino de las mismas. Existe un creciente número de procesos industriales que requieren una exactitud en su control o una gama de velocidades que no se puede conseguir con motores de corriente alterna. El motor de corriente continua mantiene un rendimiento alto en un amplio margen de velocidades, lo que junto con su alta capacidad de sobrecarga lo hace más apropiado que el de corriente alterna para algunas aplicaciones. Los motores de corriente continua empleados en juguetes, suelen ser del tipo de imán permanente, proporcionan potencias desde algunos vatios a cientos de vatios. Los empleados en giradiscos, unidades lectoras de CD, y muchos discos de almacenamiento magnético son motores en los que el rotor es de imán fijo y sin escobillas. En estos casos el inductor, está formado por un juego de bobinas fijas, y un circuito electrónico que cambia el sentido de la corriente a cada una de las bobinas para adecuarse al giro del rotor. Este tipo de motores proporciona un buen par de arranque y un eficiente control de la velocidad. Una última ventaja es la facilidad de inversión de marcha de los motores grandes con cargas de gran inercia, al mismo tiempo que devuelven energía a la línea actuando como generador, lo que ocasiona el frenado y la reducción de velocidad (Ruiz, 2009)..
(20) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 10. 1.4 Alternativas de control de velocidad en motores de corriente directa Los motores de corriente directa o motores CD, siguen siendo una de las fuentes motrices más usadas en la industria, especialmente para aplicaciones que requieren un alto control de potencia y de precisión. Antiguamente, la mayoría de los servomotores pequeños empleados para propósitos de control eran de corriente alterna (CA). Sin embargo, un motor CA es más difícil de controlar, especialmente para control de posición con precisión y debido a sus características no lineales, los hace más difíciles de analizar. Por otro lado, los motores CD son más caros debido a las escobillas y conmutadores y los de flujo variable son adecuados sólo para cierto tipo de aplicaciones de control. Antes de que la tecnología de imán permanente se desarrollara completamente, el torque por unidad de volumen o peso de un motor CD con un campo de imán permanente, estaba muy lejos de lo deseado. Actualmente, con el desarrollo de los imanes de “tierras raras” es posible alcanzar una alta relación torque-volumen en motores CD de imán permanente a un costo razonable. Además, los avances alcanzados en la tecnología de escobillas y conmutadores hacen prácticamente que no necesiten mantenimiento. Los avances logrados en electrónica de potencia han hecho que los motores CD sin escobillas sean muy populares en sistemas de control de alto desempeño. Con las técnicas de manufactura avanzada se fabrican motores CD con rotores sin hierro que tienen una inercia muy baja, con lo cual alcanzan propiedades de relación torque-inercia muy alta y constantes de tiempo muy bajas, estos han abierto nuevas aplicaciones para los motores CD en equipos periféricos de cómputo, tales como unidades de cinta, impresoras, unidades de disco y procesadores de textos, así como en la industria automotriz, de máquinasherramienta y en aplicaciones en el área de la robótica (Salazar Gutiérrez, 2012). 1.4.1 Control por tensión variable Dado el uso tan extendido de la corriente alterna, es necesario disponer de un equipo que la convierta en continua, para poder explotar las flexibles características de los motores de corriente continua. Inicialmente se empleaban conjuntos convertidores rotativos motor-generador, pero el rápido desarrollo de los.
(21) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 11. rectificadores estáticos han hecho desaparecer casi completamente los primeros. El empleo de motores de corriente continua de velocidad variable, está quedando relegado a procesos donde se requiere una potencia pequeña, comparada con la potencia total de la instalación. En tales condiciones, es raramente necesario instalar una línea de corriente continua a tensión constante a través de la fábrica, pudiéndose lograr una alimentación de los motores más eficiente, mediante equipos alimentadores de continua para cada motor o grupo de motores. El control de estos motores se puede simplificar mediante el empleo de rectificadores controlados por rejilla, o con amplificador magnético (G.J. and M.L., 1984). 1.4.2 Control de velocidad por tensión de rotor Cuando un motor Shunt trabaja con excitación constante, la velocidad es aproximadamente proporcional a la tensión del inducido. Una reducción en dicha tensión, manteniendo constante la corriente de excitación, causa el descenso de la velocidad por debajo de la velocidad base. El par desarrollado a tensión reducida queda limitado por la corriente máxima de inducido y los límites de conmutación del motor. Como la potencia se reduce en proporción a la velocidad, la carcasa, el precio y el tamaño de un motor Shunt para trabajar con par constante, se basan en la potencia a velocidad máxima, lo que da lugar a un motor considerablemente más pequeño que el requerido cuando se emplea regulación Shunt, para un mismo campo de velocidades (Meneses Sánchez, 2013). 1.4.3 Control de velocidad de un motor con excitación serie La velocidad de un motor con excitación serie, para un par dado, se puede controlar con una resistencia en serie que reduzca la tensión en los devanados de inducido y de excitación, lo que reduce la velocidad del motor. El control de velocidad se puede efectuar también con una resistencia conectada en paralelo con la excitación o con el devanado del rotor. Cuando tal resistencia se conecta en paralelo con la excitación, la velocidad del motor aumenta, pero como el problema es normalmente.
(22) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 12. reducir la velocidad del motor serie, el método no se usa ampliamente. Sin embargo es usado conectar una resistencia en paralelo con el inducido, además de una resistencia en serie con él (G.J. and M.L., 1984). 1.4.4 Control de velocidad por excitación Shunt Cuando un motor Shunt trabaja con excitación débil, la corriente del inducido produce un par en el motor proporcional a la reducción de la excitación, pero dicha corriente no puede sobrepasar la nominal debido a la limitada capacidad térmica de la máquina. Además como la velocidad es inversamente proporcional al campo excitador para las velocidades superiores a la mínima, el producto del par por la velocidad es constante. Es decir, si el campo de excitación de un motor Shunt se debilita la velocidad aumenta y el par se reduce, resultando que el motor desarrolle una potencia constante. Se puede obtener para un motor Shunt y sobre la velocidad mínima, una gama de velocidad de 3:1, dependiendo de la potencia del motor. En los motores de menos de 20 HP se puede obtener una gama de 4:1 o mayor; sin embargo para potencias de más de 1000 HP, y aún con devanados compensadores, la gama quedaría limitada 2:1. Estas cifras no se pueden aplicar a los motores especiales de corriente continua para bobinadoras en las que se requiere una característica de potencia constante entre unos márgenes de velocidad que dependen del diámetro de las bobinas que han de manejar. La velocidad queda limitada por la máxima velocidad periférica que permite el inducido y por la buena conmutación del motor. Se alcanza un punto límite cuando la distorsión debida a la reacción de inducido, con campo excitador débil, es tan grande que se produce un gran chisporroteo. Como un motor con control por devanado Shunt tiene una característica de potencia constante, el tamaño de la carcasa y el precio están basados sobre la potencia a la velocidad mínima. Aunque el control por devanado Shunt es muy eficiente para una gama limitada de velocidades, existen muchas máquinas que requieren un par constante, y para tales aplicaciones las dimensiones físicas y el precio de los motores pueden no ser aceptables (Meneses Sánchez, 2013)..
(23) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 13. 1.5 Modelos matemáticos dinámicos Cuando se hace necesario conocer el comportamiento de un sistema en unas determinadas condiciones y ante unas determinadas entradas, se puede recurrir a la experimentación sobre dicho sistema y a la observación de sus salidas. Sin embargo, en muchos casos la experimentación puede resultar compleja o incluso imposible de llevar a cabo, lo que hace necesario trabajar con algún tipo de representación que se aproxime a la realidad, y a la que se conoce como modelo. Básicamente, un modelo es una herramienta que permite predecir el comportamiento de un sistema sin necesidad de experimentar sobre él (Garces and Gaviria, 2014). Los modelos matemáticos pueden adoptar formas distintas. Dependiendo del sistema del que se trate y de las circunstancias específicas, un modelo matemático puede ser más conveniente que otros. Por ejemplo, en problemas de control óptimo, es provechoso usar representaciones en el espacio de estados. En cambio, para los análisis de la respuesta transitoria o de la respuesta en frecuencia de sistemas lineales con una entrada y una salida invariantes en el tiempo, la representación mediante la función de transferencia puede ser más conveniente que cualquier otra. Una vez obtenido un modelo matemático de un sistema, se usan diversos recursos analíticos, así como computadoras para estudiarlo y sintetizarlo (Ogata, 2010). 1.5.1 Función de transferencia En la teoría de control, a menudo se usan las funciones de transferencia para caracterizar las relaciones de entrada y salida de componentes o de sistemas que se describen mediante ecuaciones diferenciales lineales e invariantes en el tiempo. Sin embargo estas no proporcionan ninguna información relativa acerca de la estructura del sistema (Ogata, 2010). Para facilitar el manejo de los modelos matemáticos de los sistemas expresados en ecuaciones diferenciales, se usa la transformada de Laplace. Por medio de esta herramienta se pueden transformar las ecuaciones diferenciales lineales en funciones algebraicas de una variable compleja S. Una ventaja de este método es que permite usar técnicas de análisis gráficos (Ogata, 2010)..
(24) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 14. Por lo tanto una función de transferencia de un sistema lineal invariante en el tiempo se puede definir como el cociente entre la transformada de Laplace de la salida y la transformada de Laplace de la entrada, bajo la suposición inicial de que todas las condiciones iniciales son cero. La aplicación del concepto de función de transferencia está limitada a los sistemas descritos mediante ecuaciones diferenciales lineales invariantes en el tiempo; sin embargo, el enfoque de la función de transferencia se usa extensamente en el análisis y diseño de dichos sistemas. A continuación se presentan algunos comentarios importantes relacionados con la función de transferencia. 1. La función de transferencia de un sistema es un modelo matemático porque es un método operacional para expresar la ecuación diferencial que relaciona la variable de salida con la variable de entrada. 2. La función de transferencia es una propiedad de un sistema, independiente de la magnitud y naturaleza de la entrada o función de excitación. 3. La función de transferencia incluye las unidades necesarias para relacionar la entrada con la salida; sin embargo, no proporciona información acerca de la estructura física del sistema (las funciones de transferencia de muchos sistemas físicamente diferentes pueden ser idénticas). 4. Si se conoce la función de transferencia de un sistema, se estudia la salida o respuesta para varias formas de entrada, con la intención de comprender la naturaleza del sistema. 5. Si se desconoce la función de transferencia de un sistema, puede establecerse. experimentalmente. introduciendo. entradas. conocidas. y. estudiando la salida del sistema. Una vez establecida una función de transferencia, proporciona una descripción completa de las características dinámicas del sistema, a diferencia de su descripción física. La descripción de sistemas mediante la función de transferencia tiene las siguientes limitaciones: . No proporciona información sobre la estructura física del sistema..
(25) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. . 15. Solo es válida para sistemas lineales con una entrada y una salida e invariantes en el tiempo.. . No proporciona información de lo que pasa dentro del sistema.. . Se necesita que las condiciones iniciales del sistema sean nulas.. En la obtención de la función de transferencia de un elemento deben seguirse los siguientes pasos (Montiel, 2006): 1.. Definir claramente la variable de entrada y la de salida.. 2.. Plantear la o las ecuaciones diferenciales lineales que describen matemáticamente el proceso físico.. 3.. Eliminar todas aquellas variables que no sean ni de entrada ni de salida.. 4.. Aplicar transformada de Laplace y determinar la relación entre la transformada de la salida y la de la entrada.. Ningún sistema dinámico de interés cumple con estos requisitos. Los sistemas reales presentan no linealidades, pueden tener más de una entrada o salida, sus parámetros cambian en el tiempo y sus condiciones iniciales no siempre tienen un valor de cero. Afortunadamente, para muchos sistemas es posible considerar esas limitaciones, trabajar sobre un punto de interés, linealizar y utilizar las ventajas del análisis por transformada de Laplace. Sin embargo otros sistemas son tan complejos que no es posible utilizar este enfoque. Para este tipo de sistemas se utiliza la representación en espacio de estado. 1.5.2 Espacio de estado Una representación de espacios de estados es un modelo matemático de un sistema físico descrito mediante un conjunto de entradas, salidas y variables de estado relacionadas por ecuaciones diferenciales de primer orden que se combinan en una ecuación diferencial matricial de primer orden. Para prescindir del número de entradas, salidas y estados, las variables son expresadas como vectores y las ecuaciones algebraicas se escriben en forma matricial (esto último solo puede.
(26) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 16. hacerse cuando el sistema dinámico es lineal e invariante en el tiempo). La representación de espacios de estado (también conocida como aproximación en el dominio del tiempo) provee un modo compacto y conveniente de modelar y analizar sistemas con múltiples entradas y salidas. Con que escribir. entradas y. salidas, tendríamos. veces la transformada de Laplace para procesar toda la. información del sistema. A diferencia de la aproximación en el dominio de la frecuencia, el uso de la representación de espacios de estado no está limitada a sistemas con componentes lineales ni con condiciones iniciales iguales a cero. El espacio de estado se refiere al espacio de. dimensiones cuyos ejes coordenados. están formados por variables de estados. El estado del sistema puede ser representado como un vector dentro de ese espacio (Dorf et al., 2005). Variables de estado: Las variables de estado son el subconjunto más pequeño de variables de un sistema que pueden representar su estado dinámico completo en un determinado instante. Estas variables de estado deben ser linealmente independientes; una variable de estado no puede ser una combinación lineal de otras variables de estado. El número mínimo de variables de estado necesarias para representar un sistema dado, n, es normalmente igual al orden de la ecuación diferencial que define al sistema. Si el sistema es representado en forma de función de transferencia, el número mínimo de variables de estado es igual al orden del denominador de la función transferencia después de haber sido reducido a una fracción propia. Cabe destacar que al convertir una representación de espacio de estado a la forma de función de transferencia puede perderse información interna sobre el sistema, pudiendo por ejemplo describir un sistema como estable aun cuando la representación de espacio de estado indica que es inestable en ciertos puntos. En circuitos eléctricos, el número de variables de estado es a menudo, pero no siempre, igual al número de elementos almacenadores de energía, como bobinas y condensadores (Ramírez and Alba, 2005). Sistemas lineales: Una forma general de representación de espacios de estado de un sistema lineal.
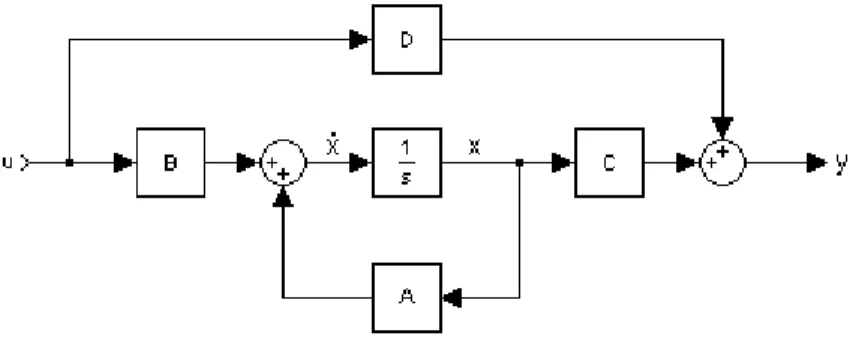
(27) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. con. entradas,. salidas y. 17. variables de estado se escribe de la siguiente forma:. En la Figura 1.4 se muestra el diagrama de bloques de un sistema en espacio de estados. Donde: 𝑑𝑖𝑚[𝐴(𝑡)] = 𝑛 × 𝑛 𝑑𝑖𝑚[𝐵(𝑡)] = 𝑛 × 𝑝 𝑑𝑖𝑚[𝐶(𝑡)] = 𝑞 × 𝑛 𝑑𝑖𝑚[𝐷(𝑡)] = 𝑞 × 𝑝 . x(t) es llamado vector de estados, y(t) es llamado vector de salida, u(t) es llamado vector de entradas (o control), A(t) es la matriz de estados, B(t) es la matriz de entrada, C(t) es la matriz de salida, y D(t) es la matriz de transmisión directa. Por simplicidad, D(t) normalmente se toma como la matriz cero.. Figura 1.4 Modelo de espacio de estado típico.. La representación en espacio de estado presenta las siguientes ventajas: Aplicable a sistemas lineales y no lineales. Permite analizar sistemas de más de una entrada o más de una salida. Pueden ser sistemas variantes o invariantes en el tiempo. Las condiciones iniciales pueden ser diferentes de cero. Proporciona información de lo que pasa dentro del sistema..
(28) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 18. Se ha comprobado que a un mismo sistema descrito por su función de transferencia le corresponden, al menos, dos representaciones en espacio de estados distintas. De hecho, la representación en espacio de estados de un sistema no es única. Por ejemplo, podemos tomar otras variables de estado que describan la dinámica del sistema que sean a su vez combinaciones lineales de las variables de estado originales, o considerar qué estas son a su vez combinaciones lineales de otras (Ramírez and Alba, 2005). Observador de estados Es poco realístico suponer que todos los estados de un sistema se puedan medir. Por esto es necesario determinar los estados de realización, a partir de medidas disponibles: entrada u(t) y salida y(t). Un observador de estado es un subsistema del sistema de control, que realiza la estimación de las variables de estado basándose en los valores medidos (observados) de las salidas y la señal de control (Giraldo Buitrago and Giraldo Suarez, 2010). Se distinguen tres tipos de observadores, en función de las variables de estado que se estimen: 1. Observador del estado completo. Es aquel que estima todas las variables de estado. 2. Observador de orden reducido. Este tipo de observador estima todas las variables no accesibles y algunas de las accesibles. 3. Observador de orden mínimo. En este caso sólo se estiman aquellas variables de estado que no son accesibles. De esta forma, un observador de estado es un sistema dinámico que permite estimar las variables de estado x(t) con base en las mediciones del vector u(t) y el vector de salida y(t) (Giraldo Buitrago and Giraldo Suarez, 2010). Un observador de un sistema dinámico se puede definir de la forma:. Donde L es la matriz de ganancia del observador que determina la velocidad con la.
(29) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 19. cual la variable de estado estimada tiende a x(t). El polinomio característico en lazo cerrado de un sistema en espacio de estados que involucre la ganancia L está definido de la siguiente forma.. 1.6 Modelos matemáticos del motor de CD controlado por armadura 1.6.1 Obtención del sistema en espacio de estados El conjunto de variables de estados puede ser elegido de infinitas formas. Para este caso se seleccionan la velocidad (que es la variable que se medirá) y la corriente de armadura (que es la que se estimará). Primeramente debe averiguarse el orden del sistema a partir del número de elementos almacenadores de energía. En este caso existen dos elementos almacenadores de energía: la inductancia de la armadura, dónde se almacena energía en un campo electromagnético y las masas rotatorias del motor y la carga que almacenan energía cinética. Por tanto, el sistema será de segundo orden. Hay una sola entrada, una salida y dos variables de estado (Montiel, 2006). A continuación. se. plantean. las. ecuaciones. diferenciales. que. describen. matemáticamente el fenómeno, que son dos (su número tiene que coincidir con el orden del sistema); una es la ecuación eléctrica y otra la ecuación mecánica: 𝑢a = Ra. ia + L a.. dia dt. + Kϕ. ωm. (1.1). Esta es la ecuación eléctrica donde Ua es la tensión aplicada a la armadura que es la variable de entrada, Ia es la corriente del circuito de armadura, ωm es la velocidad de rotación en radianes por segundo, Kϕ es el denominado Coeficiente de Acoplamiento Electromecánico, Ra es la resistencia de armadura en Ohm y La la inductancia de armadura en Henrios. La variable de estado de la parte eléctrica de este sistema electromecánico es la corriente del circuito de armadura Ia. La ecuación de estado correspondiente se obtiene derivando la variable de estado: dia dt. 1. = L a . [−Ra. ia − Kϕ. ωm + 𝑢a]. (1.2).
(30) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 20. La ecuación mecánica plantea que el torque electromagnético es igual a la suma del torque mecánico de oposición de la carga y el torque dinámico necesario para acelerar o desacelerar la carga. El torque electromagnético está dado por la ecuación: Tem = Kϕ. ia. (1.3). Como el torque mecánico es directamente proporcional a la velocidad puede plantearse la ecuación siguiente: Tmec = 𝐹. ωm. (1.4). Donde F es el coeficiente de proporcionalidad llamado también Coeficiente de Fricción Viscosa. Por otra parte, el torque dinámico es igual a: Tdin = 𝐽𝑡 .. dωm. (1.5). dt. Donde 𝐽𝑡 es la inercia total de las masas rotatorias que es la suma de la del motor y la de la carga mecánica. De acuerdo a esto la ecuación mecánica es: Kϕ. ia = 𝐹. ωm + 𝐽𝑡 .. dωm dt. (1.6). La variable de estado, de acuerdo a la ecuación para el movimiento rotatorio es la velocidad angular ωm, por tanto, la ecuación de estado mecánica es: dωm dt. 1. = 𝐽t . [Kϕ. ia − 𝐹. ωm]. (1.7). Por tanto el sistema en espacio de estado queda de la siguiente forma: 𝐹. Kϕ. − 𝐽𝑡 𝑤 0 ẇ 𝐽𝑡 [ ] = [ Kϕ ] [ ]+[ ].𝑢a Ra 1/L a 𝑖 −La −La 𝑖. 𝑤 = [1. 𝑤 0]. [ 𝑖 ].
(31) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 21. 1.6.2 Modelado matemático para la obtención de la función transferencial del sistema A continuación se deducirá la función de transferencia del motor de corriente continua del epígrafe anterior, se repiten las ecuaciones 1.1 y 1.6 (Montiel, 2006): 𝑢a = Ra. ia + L a.. dia dt. + Kϕ. ωm. Kϕ. ia = 𝐹. ωm + 𝐽𝑡 .. dωm dt. (1.1) (1.6). Debe despejarse la corriente en 1.6 y sustituirse en 1.1. Es conveniente escribir la función de transferencia del motor en función de constantes que tengan algún significado físico. Estas constantes son: 𝐑𝐚. 𝐓𝐚 = 𝐋 𝐚 que es la Constante de Tiempo de la Armadura del motor que evalúa la rapidez con que varía la corriente si la velocidad permanece constante. 𝐉.𝐑𝐚. 𝐓𝐦 = (𝐊𝛟)𝟐 que es la Constante de Tiempo Electromecánica del motor que evalúa la rapidez con que varía la velocidad si se desprecia la constante de tiempo de la armadura. 𝐅.𝐑𝐚. 𝛄 = (𝐊𝛟)𝟐. que es la Constante de Fricción Viscosa que cuantifica el. amortiguamiento del elemento provocado por la carga. Considerando como entrada la tensión aplicada a la armadura Ua y como salida la velocidad angular en radianes por segundo ωm y utilizando las constantes definidas anteriormente la función de transferencia del motor queda de la siguiente forma:. 1⁄ Kϕ 𝐺𝑚(𝑠) = Ta. Tm. 𝑠 2 + (Tm + γ. Ta). 𝑠 + 1 + γ 1.7 Control en cascada Uno de los métodos más utilizados para reducir al mínimo perturbaciones que entran en un proceso lento es el control en cascada o circuitos múltiples. El control en cascada puede acelerar también la respuesta del sistema de control, reduciendo.
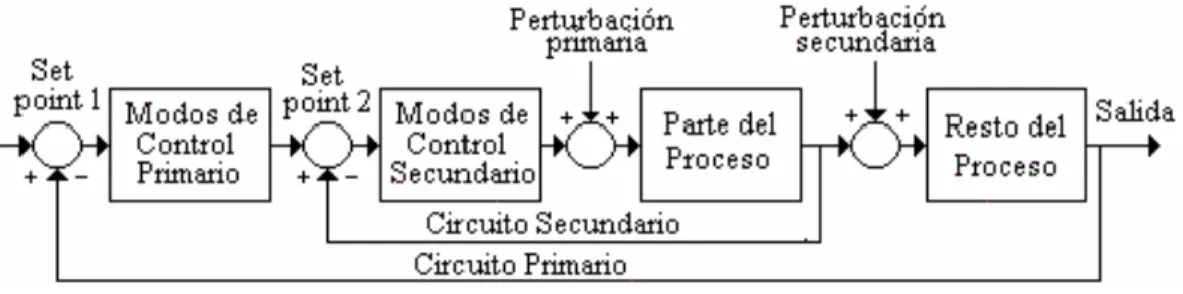
(32) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 22. la constante de tiempo de la función de transferencia del proceso que relaciona la variable manipulada con la salida del mismo. El control en cascada se define como la configuración donde la salida de un controlador de realimentación es el punto de ajuste para otro controlador de realimentación, por lo menos. El control de cascada involucra sistemas de control de realimentación o circuitos que estén ordenados uno dentro del otro (Shinskey, 1996). En la Figura 1.5 se muestra un diagrama de bloques correspondiente a un sistema de control en cascada. En lugar de ajustar el elemento de control final la salida del controlador primario es el punto de ajuste del circuito de control secundario.. Figura 1.5 Diagrama en bloques de controladores conectados en cascada.. El circuito de control secundario que abarca sólo una porción del proceso total en un sistema de orden menor, de modo que el controlador se puede ajustar para dar una respuesta más rápida. Por lo común, hay tres características principales presentes en el control en cascada para que sea eficaz. La constante de tiempo del circuito cerrado del circuito secundario debe ser menor que un tercio de la constante de tiempo del circuito primario, el circuito secundario debe incluir una fuente de perturbación de proceso importante, y la variable de proceso que se regula debe ser capaz de desplazar a la variable controlada primaria a su valor deseado. Existen dos propósitos para usar control cascada: 1. Eliminar el efecto de algunas perturbaciones. 2. Mejorar la dinámica del lazo de control..
(33) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 23. 1.7.1 Cuándo usar control en cascada El control en cascada es efectivo si el lazo interno es más rápido que el lazo externo, si la perturbación principal afecta primero al lazo interno. Normalmente, un lazo de control en cascada no debería utilizarse si la constante de tiempo del lazo externo es por lo menos cuatro veces mayor que la constante de tiempo de lazo interno. El control realimentado en su forma sencilla, provee un buen funcionamiento a lazo cerrado si la fracción de tiempo muerto es pequeña, las perturbaciones son pequeñas y lentas, así como procesos con dinámica rápida. Adicionalmente el control en cascada requiere que la segunda variable pueda ser medida y agregue un costo aceptable o razonable. El control en cascada puede ser considerado: 1. Cuando el control realimentado simple no provee un desempeño satisfactorio a lazo cerrado. 2. La medida de la variable es disponible. La variable secundaria debe satisfacer los siguientes criterios: 1. Debe indicar la ocurrencia de una importante perturbación. 2. Debe haber una relación causal entre la variable manipulada y la segunda variable. 3. La variable secundaria debe tener una dinámica más rápida que la variable primaria. 1.7.2 Control en cascada para motores de CD El sistema consta de un lazo interno de corriente y otro externo de velocidad. La salida del regulador del lazo interno de corriente se aplica directamente al conjunto convertidor-motor. Este sistema opera de forma tal que, al ocurrir perturbaciones que tienen que ver con la parte eléctrica, que es más rápida, es el lazo interno de corriente quien las resuelve sin que prácticamente el lazo externo de velocidad tenga que actuar. Si la tensión que alimenta al motor disminuye súbitamente la corriente baja también de forma súbita, la realimentación de corriente disminuye y el error del lazo de.
(34) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. 24. corriente aumenta con lo cual se restituye rápidamente el valor inicial de corriente que era el necesario para vencer el torque solicitado por la carga. Este proceso es tan rápido que la velocidad prácticamente no tiene tiempo de cambiar. El lazo de corriente al estar subordinado al de velocidad “resuelve” las necesidades de éste sin su intervención (Montiel, 2006)..
(35) CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS. 25. CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS En el presente capítulo se dedica un epígrafe al esquema de ganancias del experimento utilizado para el desarrollo del proyecto y otro al cálculo de los parámetros de motor. Además se dedican epígrafes al cálculo del observador de estados, su correspondiente validación mediante simulaciones tanto en tiempo continuo como en tiempo discreto y la validación mediante simulaciones del control en cascada, utilizando el estimador de corriente para la realimentación del lazo interno. 2.1. Alimentación del motor de CC. Convertidores CA/CC Su misión fundamental es proporcionar energía eléctrica en forma de corriente continua a partir de una fuente de corriente alterna (normalmente la red). La corriente continua se obtiene aprovechando determinados trozos de la corriente alterna de cada una de las fases de entrada. El resultado es una corriente de una sola polaridad pero variable. Se pueden utilizar distintos filtros para eliminar las componentes variables de la salida y conseguir una corriente continua más pura. Utilizando semiconductores controlables (tiristores) se puede ajustar la duración del trozo de tensión alterna aprovechable y de esa forma conseguir corriente continua con valor medio variable entre ciertos límites (incluso negativos). 2.1.1 Clasificación de los convertidores CA/CC I-En función del número de fases de la fuente alterna a) Monofásicos. b) Trifásicos. II-En función de la posibilidad de control a) No controlados o rectificadores. − No se puede controlar la magnitud de la tensión continua, que será siempre fija. Se construyen con diodos..
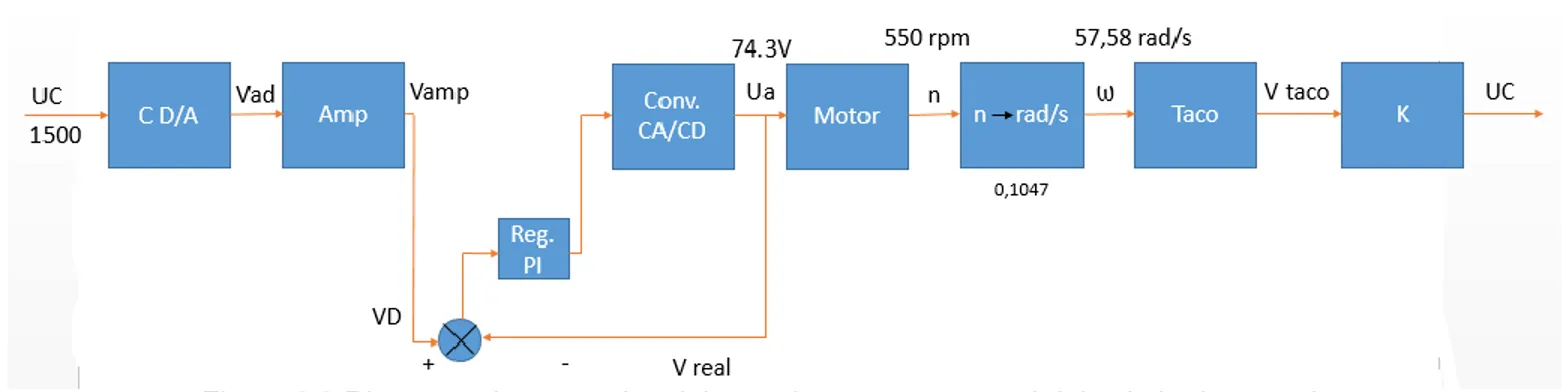
(36) CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS. 26. b) Controlados. − Se puede regular la magnitud de la tensión CC mediante el control de la zona de conducción de los semiconductores de cada fase. Tradicionalmente se construyen con tiristores de los que se controla el instante de comienzo de conducción (control por fase). La extinción se produce de forma natural: cuando pasa la corriente por cero o cuando se dispara el tiristor de otra fase hacia el que se desvía la corriente continua. c) Semicontrolados − Se construyen de forma mixta con diodos y tiristores y pueden controlar la magnitud de la tensión continua de salida, aunque de manera menos flexible. Para la realización de este trabajo se cuenta para alimentar el motor con un rectificador monofásico, de onda completa y semicontrolado como se muestra en la Figura 2.1. El mismo se implementó con los equipos de laboratorios del kit de accionamiento Alecop, existente en las universidades cubanas.. Figura 2.1 Circuito rectificador monofásico semicontrolado de onda completa. 2.2 Esquema del experimento Ganancias de estado estable. En la Figura 2.2 se muestran las ganancias que presenta el experimento en estado estable. C D/A es la ganancia que presenta el conversor digital-análogo del PLC, luego el esquema tiene una no linealidad, porque al dar voltaje al circuito de disparo este presenta una zona muerta donde no hay conducción, luego está la ganancia que presenta el puente rectificador semicontrolado que convierte la corriente alterna en corriente continua, después está el motor que en estado estable su ganancia es.
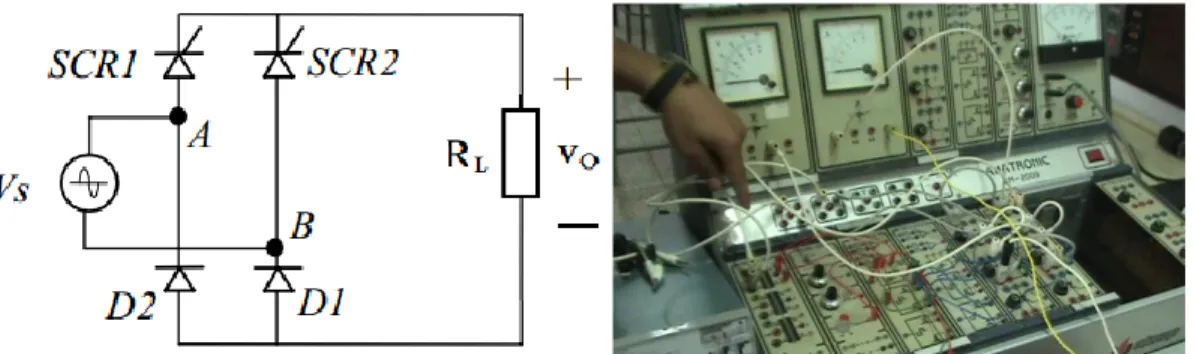
(37) CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS. 27. 1/ Kϕ, luego se tiene un tacogenerador que convierte el valor de velocidad en un valor de voltaje, este es llevado al PLC que convierte el mismo en unidades del conversor (UC).. Figura 2.2 Diagrama de ganancias del experimento.. Control del voltaje de armadura Para la implementación práctica del sistema de control es necesario que el voltaje de armadura se mantenga constante ante cualquier disturbio. Al aumentar la carga del motor el voltaje de alimentación cae bruscamente, pero el voltaje que está llegando al observador en la simulación sigue siendo el mismo, por esto no se obtendrán los resultados deseados ya que estará trabajando el motor con una alimentación diferente a la del observador. Para resolver este problema se utilizó un controlador PI para mantener constante el voltaje de la armadura del motor. Para ello se tomó como referencia del lazo la tensión de mando del circuito de disparo del rectificador CA/CD, se realimenta el voltaje que entrega el rectificador y con la salida del regulador se corrige la tensión de mando para mantener el voltaje de armadura constante en función de la señal de mando. Con esto también se consiguió eliminar la zona muerta que tenía el accionamiento. Al introducir en el esquema un control en el voltaje de armadura (Ua), este resolvió el problema de la no linealidad, porque con el mismo ya no se le da un voltaje fijo al circuito de disparo sino que el controlador calcula que voltaje que se necesita para mantener el Ua constante en función de la tensión de control dada al circuito de disparo del rectificador. En la figura 2.3 se muestra el esquema de las ganancias del experimento introduciendo el control del voltaje de armadura..
(38) CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS. 28. Figura 2.3 Diagrama de ganancias del experimento con control del voltaje de armadura.. El esquema reducido mostrado en la Figura 2.4 queda como una ganancia que convierte las unidades del conversor dadas por el PLC en el voltaje de armadura, la ganancia que presenta el motor y finalmente la ganancia que lleva de rad/s a unidades del conversor nuevamente.. Figura 2.4 Esquema reducido de las ganancias presentes en el experimento.. Para las condiciones de operación en que fue evaluado el esquema propuesto, se tienen los siguientes valores para las ganancias en estado estable. K1= 0.0494. motor=1/ Kϕ=0.7881. K2= 25.7425. 2.3 Medición de los parámetros del motor Aunque el modelo es bien conocido no es muy simple la determinación de la totalidad de sus parámetros con un grado de precisión aceptable. Sobre todo con los parámetros J y F que son la inercia y coeficiente de fricción viscosa asociados al conjunto motor-carga. Teniendo en cuenta que el modelo del motor es de segundo orden, se pueden tener dos posibilidades: que tenga dos raíces reales o dos raíces complejas conjugadas. Para el caso de raíces reales puede ser que una de ellas sea dominante y la planta se comporte como primer orden, o que no haya raíz dominante. En cualquiera de los casos la respuesta al paso del sistema no oscila y se pude identificar la presencia de uno de ellos a partir de la pendiente con que inicie la respuesta. Cuando la.
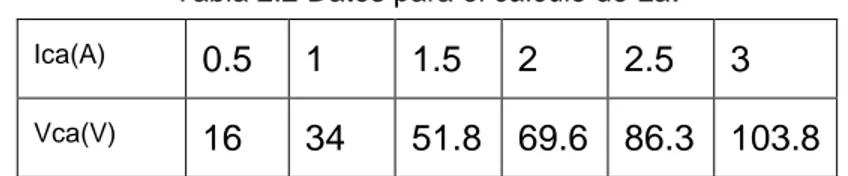
(39) CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS. 29. respuesta al paso presenta oscilaciones subamortiguadas evidentemente se está en presencia de raíces complejas conjugadas. En este caso y para las condiciones de pruebas en laboratorio, la respuesta al paso observada se aproxima a la de un sistema de primer orden, pero presenta dos raíces complejas conjugadas (-18.4 ± 5.04i), no tiene oscilaciones visibles porque su razón de amortiguamiento es 0.96. 2.3.1 Cálculo de Ra, La y Kϕ Para el cálculo de Ra es necesario llevar a cabo una prueba a rotor trancado, excitando el motor con una fuente de CD (el voltaje en el inductor es 0) y midiendo el valor de corriente que circula por la armadura, el procedimiento debe repetirse varias veces variando el voltaje para obtener varios pares de datos los cuales se promediarán, luego por una ley de Ohm se calcula Ra =. 𝑢a ia. . En la Tabla 2.1 se. muestran los valores medidos de corriente de armadura y voltaje de entada utilizados para el cálculo de Ra. Tabla 2.1 Datos para el cálculo de Ra. Ia (A). 0.5. 1. 1.5. 2. 2.5. 3. Voltaje de. 1.85. 3.5. 5.3. 7.1. 8.5. 10.2. alimentación (V). Ra = 3.3662 Ω Para calcular La se realiza un procedimiento similar al anterior pero la fuente que se utiliza es de CA. Después de obtener los datos de corriente y voltaje se calcula Za por una ley de Ohm. En la Tabla 2.2 se muestran los datos de corriente de armadura y voltaje de entrada suministrado por la fuente alterna utilizados para el cálculo de La. Tabla 2.2 Datos para el cálculo de La. Ica(A). 0.5. 1. 1.5. Vca(V). 16. 34. 51.8 69.6 86.3 103.8. Luego se procede a calcular La: 𝑍𝑎 = √𝑅𝑎2 + 𝑋𝑎2. 2. 2.5. 3.
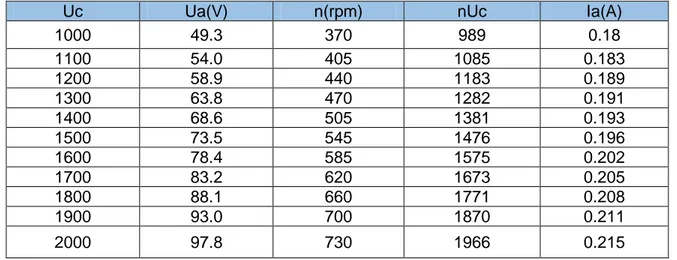
(40) CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS. 30. 𝑋𝑎 = √𝑍𝑎2 − 𝑅𝑎2 𝑋𝑎 = 𝜔. 𝐿𝑎 𝑋𝑎. 𝐿𝑎 = 2𝛱.60 La = 0.0926 H Para calcular Kϕ se excita el motor y se mide Ua, Ia y la velocidad del motor sin carga, al igual que en los anteriores ensayos se deben tomar distintos juegos de datos para promediarlos y obtener una medición más exacta, luego mediante la siguiente ecuación se calcula Kϕ. Kϕ =. 𝑢a−Ra.ia ωm. Kϕ = 1.2688. 𝑉.𝑠𝑒𝑔 𝑟𝑎𝑑. La Tabla 2.3 muestra los datos tomados del experimento para la determinación de Kϕ. Uc es el mando que se le da al motor a través del PLC, Ua es el voltaje que se le suministra a la armadura del motor que no es más que la conversión de Uc, n es la velocidad en rpm, nUc es la lectura de velocidad en unidades del conversor (Uc) e Ia es la corriente que circula por la armadura del motor. Los datos son tomados en vacío, alrededor de un punto de operación. Mando de 1000 a 2000, (medio: 1500). Con control de voltaje de armadura. Tabla 2.3 Datos tomados para el cálculo de Kϕ.. Uc 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900. Ua(V) 49.3 54.0 58.9 63.8 68.6 73.5 78.4 83.2 88.1 93.0. n(rpm) 370 405 440 470 505 545 585 620 660 700. nUc 989 1085 1183 1282 1381 1476 1575 1673 1771 1870. Ia(A) 0.18 0.183 0.189 0.191 0.193 0.196 0.202 0.205 0.208 0.211. 2000. 97.8. 730. 1966. 0.215.
(41) CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS. 31. Al tener calculados los anteriores tres parámetros se puede pasar a calcular 𝐽𝑡 que es la inercia total de las masas rotatorias que es la suma de la del motor y la de la carga mecánica y F que es el coeficiente de proporcionalidad llamado también Coeficiente de Fricción Viscosa. 2.3.2 Identificación experimental para el cálculo de J El modelo matemático En la Figura 2.5 se muestra el esquema utilizado para el cálculo de J a partir de realizar una identificación experimental.. Figura 2.5 Esquema del experimento para determinar J.. El modelo matemático de esta planta es muy sencillo y bien conocido. La función de transferencia de esta planta, tomado como entrada y como salida las señales indicadas en la figura, es la siguiente: 𝐶(𝑠). 𝐾. 𝑐 = 𝑇 𝑠+1 ∙𝐿 𝑀(𝑠) 𝑐. 𝐾∅ 𝑎. 𝐽𝑠2 +(𝐿. 𝑎 𝐵+𝑅𝑎 𝐽)𝑠+𝑅𝑎 𝐵+𝐾𝑏 𝐾∅. 𝐾. 𝑡 ∙ 𝑇 𝑠+1 𝑡. Donde: 𝐶. : voltaje a la salida del tacogenerador-acondicionador de señal, proporcional a la velocidad del motor. 𝑈. : voltaje de mando del convertidor AC/DC. 𝐾𝑐 : ganancia del convertidor AC-DC 𝑇𝑐 : constante de tiempo del convertidor AC-DC 𝐾∅ : constante de par del motor.
(42) CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS. 32. 𝐾𝑏 : constante de fuerza contraelectromotriz del motor 𝐿𝑎 : inductancia de armadura 𝑅𝑎 : resistencia de armadura del motor 𝐽. : inercia del conjunto motor-carga. 𝐵. : fricción del conjunto motor-carga. 𝐾𝑡 : ganancia del tacogenerador-acondicionador de señal 𝑇𝑡 : constante de tiempo del tacogenerador Se puede apreciar que el modelo dinámico que describe a esta planta es de cuarto orden. En la práctica sucede que 𝑇𝑐 , 𝐿𝑎 y 𝑇𝑡 son muy pequeñas y pueden ser consideradas igual a cero. Esto permite aproximar el modelo del conjunto a uno de primer orden, el que de forma general puede ser expresado como: 𝐶(𝑠) 𝐾𝑚 = 𝑀(𝑠) 𝑇𝑚 𝑠 + 1 Donde: 𝐾𝑚 : ganancia del sistema (en este caso del conjunto convertidor-motor-cargatacogenerador) 𝑇𝑚 : constante de tiempo del sistema (en este caso también se refiere a dicho conjunto) Las expresiones para calcular los parámetros de esta función de transferencia de primer orden, teniendo en cuenta las consideraciones hechas anteriormente, son: 𝐾𝑚 = 𝑅. 𝐾𝑐 𝐾∅ 𝐾𝑡. 𝑎 𝐵+𝐾𝑏 𝐾∅. y. 𝑇𝑚 = 𝑅. 𝑅𝑎 𝐽. 𝑎 𝐵+𝐾𝑏 𝐾∅. Como se puede apreciar, los valores de 𝐾𝑚 y 𝑇𝑚 dependen de siete parámetros del conjunto convertido-motor-carga-tacogenerador. Algunas de ellos son de fácil medición, como 𝐾𝑡 y 𝑅𝑎 . Otros en cambio son un poco difíciles de determinar con los instrumentos normalmente disponibles como es el caso de 𝐽, o también dependiente de condiciones de carga y linealidad como sucede con F..
(43) CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS. 33. Para la obtención de estos dos parámetros se procede a realizar la identificación del modelo matemático de primer orden del motor y una vez que se tienen estos se puede calcular F y J porque Km solo depende de F (ya están calculados los demás parámetros) y Tm solo depende de J y F. Para la identificación del sistema existe una metodología ampliamente utilizada en la actualidad basada en la aplicación de señales del tipo secuencias binarias pseudo aleatorias, conocidas como PRBS a partir de sus iniciales en idioma inglés (Aguado, 2000), como señales de entrada de excitación al sistema. Estas señales poseen una función de autocorrelación muy similar a una delta de Dirac, por lo que son muy útiles para estimar la respuesta impulsiva del sistema bajo estudio, a partir de autocorrelacionar la señal de respuesta. El primer paso para realizar la identificación aplicando esta técnica es diseñar y generar la señal PRBS. Para ello es importante tener en cuenta el ancho de banda del sistema dinámico bajo estudio. Para determinarlo primeramente se realizó una identificación no paramétrica elemental, aplicando una señal paso escalón y se observó la respuesta. Esto permitió tener una primera idea aproximada del modelo y a partir de él se estimó su ancho de banda, que en este caso fue de aproximadamente 10 radianes por segundo (1.6 Hz). La frecuencia de muestreo se eligió de 50 Hz, cumpliendo el criterio práctico de ser superior a diez veces el ancho de banda. El tiempo de muestreo, en consecuencia, quedó de 20 milisegundos. Para este caso se diseñó una PRBS de orden 6 con dos secuencias consecutivas completas, lo que permite emplear una primera sesión para identificación y la otra para validación. Los niveles se eligieron de 0.5 y 0.7 en por unidad; estos caen en la parte lineal de la característica entrada-salida del conjunto. La PRBS se definió con 10 muestras por estado, que al tiempo de muestreo definido corresponde a 200 milisegundos de duración cada estado simple. Así los cambios más rápidos están en el orden de una constante de tiempo mientras los más lentos permiten que la respuesta se estabilice. El tiempo total del experimento quedó de 25.4 segundos. En la Figura 2.6 se muestran la señal PRBS aplicada y la respuesta de la planta bajo estudio..
(44) CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS. 34. Figura 2.6 Señal de PRBS y respuesta del motor.. A partir de los datos obtenidos se estimaron algunas posibilidades de modelo, combinando diferentes estructuras y órdenes. Finalmente, teniendo en cuenta el conocimiento que se tiene del comportamiento dinámico de la planta, se eligió el modelo que de forma más fiel reproduce la salida a partir de la señal de entrada. Este fue: 𝐶(𝑠) 𝑀(𝑠). 1.1494. = 0.1103𝑠+1. Calculo de F y J: 𝐹= 𝐽=. 𝐾∅ −𝐾𝑚 𝐾𝑏 𝐾∅ 𝑅𝑎 𝐾𝑚. 𝑠𝑒𝑔. =0.0228 𝑁. 𝑚 𝑟𝑎𝑑. 𝑇𝑚 (𝐾𝑏 𝐾∅ +𝑅𝑎 𝐵) 𝑅𝑎. =0.05 𝐾𝑔. 𝑚2. Cálculo de J (Método Físico) Como se muestra en la Figura 2.7, el experimento se realiza colocando el motor a cierta altura, se enrolla en el rotor una cuerda atada a una masa, y se deja caer libremente, se mide el tiempo de dicha caída y se calcula la inercia con la fórmula: 2ℎ 2 2 )𝑟 𝑡 𝑡2 2ℎ. 𝑚 (𝑔 − 𝐽=. J: inercia del motor m: masa del contrapeso. m= 0.42 Kg.
(45) CAPÍTULO 2. PROPUESTA DE LA ESTRATEGIA DE CONTROL Y DISEÑO DEL OBSERVADOR DE ESTADOS. g: gravedad. g= 9.8 m/𝑠 2. h: altura. h= 1.17 m. r: diámetro del rotor. r= 0.04 m. 4,16. t(s). 4,26. 4,16. 4,26. 35. 4,12. El experimento debe realizarse varias veces para promediar los tiempos para evitar errores provocados en la medición. J=0.0488 Kg. m2. Figura 2.7 Esquema del método físico.. 2.3.3 Cálculo de F Para el cálculo de F se llegó a la conclusión que no es un valor fijo que se mantiene ante cualquier condición como pasa con los anteriores parámetros sino que es una función del estado de carga del motor. Al cambiar este, la velocidad aumenta o disminuye afectando el valor de F. En este trabajo se propone realizar un cálculo en tiempo real de su valor, con lo que se ganará en exactitud en el funcionamiento del observador. La expresión para su cálculo se describe a continuación y a ella se llega al realizar un análisis en estado estable de las ecuaciones que componen el modelo matemático del motor. 𝐹=. (𝐾𝜙.𝑈𝑎−𝐾𝜙2 .𝜔) 𝑅𝑎.𝜔. Para diseñar el observador debe tenerse un valor inicial de F. En este caso se empleó el estimado a partir de la identificación. Con él se calcula el vector L que.
Figure
+7

Outline
Documento similar
Asimismo, adem´as de realizar el dise˜no del esquema de control antes mencionado, se debe de implementar en tiempo real, por lo que se debe dise˜nar y acondicionar sistemas
Las características del motor con conexión aditiva son que, la fuerza magnetomotriz (fmm) de los dos campos se suma, ya que el flujo de corriente de ambos campos está en el mismo
Una de ellas es arrancar al motor por voltaje de armadura en forma paulatina (alimentación tipo rampa) A.4. y la otra es mediante un lazo de corriente A.5. con excitación
Implementar el sistema de control para un motor de corriente directa de doce fases sin colector mecánico, en las etapas de hardware y software, incluyendo el algoritmo de
En (Allaoua et al 2009) se describe una aplicación del ANFIS para optimizar el control de velocidad de un motor de corriente directa junto con la inteligencia colectiva. En
