Comparación del desempeño de dos equipos de CBCT odontológicos
66
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Centro de Estudios de Electrónica y Tecnologías de la Información. TRABAJO DE DIPLOMA Comparación del desempeño de dos equipos de CBCT odontológico. Autor: Lázaro Reyes Veiglia Tutor: DrC. Yusely Ruiz González e-mail: [email protected]. Co-tutora: DrC. Marlen Pérez Días e-mail: [email protected]. Santa Clara 2015 "Año 57 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Informática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. Si tu intención es describir la verdad, hazlo con sencillez y la elegancia déjasela al sastre. Albert. Einstein.
(5) ii. DEDICATORIA. A mi padre que es mi guía y a mi madre que es la MEJOR MADRE DEL MUNDO. A toda mi familia y amigos que de alguna manera han hecho posible que yo haya terminado este trabajo. A la memoria de Guillermito Cuellar..
(6) iii. AGRADECIMIENTOS. A mi madre, que es mi inspiración. A mi familia, que es mi apoyo. A tia Lucia, por sus consejos. A tios Isa y Alexis y mi primo Amed, por siempre estar presentes. A Lázaro Yera y mis primos Adrian y Dailyn, por estar a mi disposición en todo momento. A mis amigos del aula que venimos luchando juntos para lograr lo que hoy tenemos. A aquellos que ya no están pero, motivaron a los que hoy estamos aquí. A mis tutoras Yusely y Marlen que me ofrecieron todo tipo de ayuda de forma incondicional y descubrieron en mi potencialidades para ser un buen profesional. A mi hermano del alma, Luis Chapeaux..
(7) iv. TAREA TÉCNICA Revisión bibliográfica del tema. Estudio de las características técnicas de los equipos i-Cat Clásico y Prexion 3D, así como de las medidas de calidad de imagen robustas NPS y MTF. Implementación sobre MATLAB de las medidas objetivas NPS y MTF para la comparación de la calidad de imagen de los equipos odontológicos i-Cat Clásico y Prexion 3D. Cálculo de las medidas robustas sobre un conjunto de imágenes de prueba de un maniquí físico de líneas.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. La CBCT es una tecnología novedosa de imaginología que realiza una tomografía de haz de Rayos X en forma de cono. Dada su novedad, aún no existe un adecuado conocimiento de la calidad de imagen que se puede llegar a obtener con ella, específicamente para odontología, por lo que en el presente trabajo se compara el desempeño de dos equipos odontológicos modernos: i-Cat Clásico y Prexion 3D, en cuanto a calidad de la imagen, utilizando predictores robustos como la función de transferencia de la modulación (MTF) y el espectro de potencias de ruido (NPS). La MTF se define matemáticamente como la magnitud de la transformada de Fourier de la función de dispersión de línea (LSF) y permite apreciar que el Prexion 3D presenta mejor resolución espacial que el i-Cat Clásico para todo el rango de frecuencia. Para calcular el NPS, el promedio de los valores de una región de interés (ROI) ruidosa seleccionada es sustraído a los valores de intensidad de los píxeles de esta. Posteriormente se obtuvo la transformada de Fourier y la curva de NPS obtenida manifiesta que el i-Cat Clásico posee componentes de ruido mayores que el Prexion 3D, para todo el rango de frecuencia que abarca. Las mediciones de la MTF y el NPS implementadas reproducen correctamente el comportamiento de la resolución espacial, el contraste imagen y el ruido, de los equipos: i-Cat Clásico y Prexion 3D y se concluye que el Prexion3D posee mayor resolución espacial y menor nivel de ruido que el i-Cat Clásico para los protocolos de adquisición analizados..
(9) vi. ABSTRACT The CBCT is a novel imaging technology that makes a positron beam of X-rays into a cone shape. Given its novelty, there is still no adequate knowledge of image quality you can get with it, specifically for dentistry, so in this study the performance of two modern dental equipments are compared: i-Cat Classic and Prexion 3D, as for image quality using robust predictors as the transfer function of the modulation (MTF) and the noise power spectrum (NPS). The MTF is mathematically defined as the magnitude of the Fourier transform of the line spread function (LSF) and permit appreciate that the Prexion 3D has better spatial resolution that the i-Cat Classic for the entire frequency range. To calculate the NPS the average of the values of a selected noised interest region (ROI) is subtracted from the intensity values of the pixels of this. Later, the Fourier transform. was obtained, and the. NPS curve obtained shows that the i-Cat Classic has higher noise components that the Prexion 3D, for the entire frequency range it covers. Measurements of MTF and NPS implemented reproduce correctly the behavior of the spatial resolution, the contrast, image and the noise of i-Cat Classic and Prexion 3D equipments, and concludes that the Prexion3D has higher spatial resolution and lower level noise than the i-Cat Classic for acquisition protocols analyzed..
(10) vii. GLOSARIO bpp: Bits por pixel CB: (Cone beam) haz cónico de rayos X CBCT: (Cone Beam CT) tomografía computarizada de haz cónico CCD: (Charge couple device) tubo intensificador de imagen/ dispositivo de carga acoplada CNR: (Contrast-noise ratio) relación Contraste-Ruido CR: (Computed radiography) radiografía computarizada CT: (Computed tomography) tomografía computarizada DR: (Digital Radiography) radiografía digital ESF: (Edge Spread Function) función de dispersión de borde FDK: método de Feldkamp, Davis y Kress para algoritmo de retroproyección filtrada de Feldkamp FOV: (Field of View) campo de visión FWHM: (Full width at half maximum) valores de la anchura a la mitad de la altura máxima en el plano axial kVp: Potencial del tubo LDPE: (Low density polythytlene) polietileno de baja densidad LSF: (Line Spread Function) función de dispersión de línea mAs: Corriente de tubo por unidad de tiempo MTF: (Modulation Transfer Function) función de transferencia de la modulación NPS: (Noise Power Spectrum) espectro de potencias de ruido PSF: (Point Spread Function) función de dispersión del punto ROI:( Region of Interest) región de interés SNR: (Signal-noise ratio) relación señal a ruido.
(11) viii. TABLA DE CONTENIDOS RESUMEN ............................................................................................................................. v GLOSARIO ......................................................................................................................... vii INTRODUCCIÓN .................................................................................................................. 1 Organización del informe ................................................................................................... 4 CAPÍTULO 1. 1.1. REVISIÓN BIBLIOGRÁFICA................................................................. 5. Odontología .............................................................................................................. 5. 1.2 Obtención de imágenes con rayos X............................................................................. 6 1.3. Imagen digital........................................................................................................... 8. 1.4. Tomografía Computarizada de haz cónico. ............................................................ 9. 1.4.1. Obtención de las imágenes digitales en CBCT. .............................................. 10. 1.4.1.1 1.5. Reconstrucción Tomográfica en CBCT ...................................................... 14. Calidad de imagen .................................................................................................. 16. 1.5.1. Parámetros operacionales que determinan la calidad de imagen en CBCT ... 18. 1.6. Función de transferencia de la modulación. ........................................................... 19. 1.7. El espectro de potencia del ruido. .......................................................................... 21. Conclusiones del capítulo ................................................................................................. 24 CAPÍTULO 2. 2.1. MATERIALES Y MÉTODOS................................................................ 25. Equipamiento. ........................................................................................................ 25. 2.1.1. Tomógrafo i-Cat Classic. ................................................................................ 26. 2.1.2. Tomógrafo Prexion 3D. .................................................................................. 26. 2.2. Maniquí físico. ....................................................................................................... 27. 2.3. Adquisición de las imágenes. ................................................................................. 28. 2.4. Software de cálculo ................................................................................................ 29.
(12) ix 2.5. Regiones de interés ................................................................................................ 29. 2.5.1. Particularidades de la región de interés para el cálculo de la MTF ................ 30. 2.5.2. Cálculo de la MTF .......................................................................................... 31. 2.5.3. Particularidades de la región de interés para el cálculo del NPS ................... 32. 2.5.4. Cálculo del NPS .............................................................................................. 33. 2.6. Medidas objetivas tradicionales de calidad de imágenes para comparación análisis. de los resultados ................................................................................................................ 34 CAPÍTULO 3.. RESULTADO Y DISCUSIÓN ............................................................... 36. 3.1. Resultado de la MTF .............................................................................................. 36. 3.2. Resultado del NPS.................................................................................................. 40. 3.3. Conclusiones del capítulo ...................................................................................... 44. CONCLUSIONES Y RECOMENDACIONES ................................................................... 46 Conclusiones ..................................................................................................................... 46 Recomendaciones ............................................................................................................. 46 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 47 ANEXOS .............................................................................................................................. 51.
(13) INTRODUCCIÓN. 1. INTRODUCCIÓN. En 1895 Wilhem Conrad Roentgen, en Alemania, obtuvo la primera radiografía de la historia como resultado de someter la mano de su esposa durante un largo tiempo a una radiación continua de un tubo de Crookes [1]. Habían sido descubiertos los rayos X. Como receptor de imagen colocó una placa de fotografía. El tubo de Crookes posteriormente fue sustituido por el tubo de Coolidge en el que el vacío es total [2]. Dentro de él los electrones liberados por un cátodo golpean contra un obstáculo que puede ser una placa de tungsteno y producen una temperatura de más de 3000 grados Celsius y radiación X. Cerca de 20 días después de que Roentgen anunciara su descubrimiento, el Dr. Otto Walkhoff, en Braunschweig, Alemania, realizó la primera radiografía dental [3]. La radiografía fue tomada de su propia boca con un tiempo de exposición de 20 minutos. En abril de 1896 el Dr. Edmund Kells, tomó la primera radiografía intraoral y fue el primer dentista que utilizó la radiografía para procedimientos Odontológicos [4]. Unos meses después del descubrimiento de los rayos X se crearon los primeros tubos de rayos X con finalidad médica comercial y más tarde en la guerra de Sudán de 1897, se utilizaron los primeros sistemas de visualización portátil [5]. Estos sistemas ofrecen imágenes bidimensionales y fueron evolucionando hasta llegar a las modernas técnicas digitales de hoy en día, denominadas radiografía computarizada CR y radiografía digital DR[6]. Sin embargo en la década de los 70 surgieron modalidades 3D como la Tomografía computarizada CT [7]. En 1972, el británico Hounsfield presenta en Londres el primer tomógrafo computarizado, en el cual la imagen no es analógica, sino digital, basada en los trabajos matemáticos de 1917 del australiano Radon y del sudafricano Cormack en 1950 [7]. El tomógrafo mide la atenuación de los rayos X conforme pasan a través de una sección del cuerpo desde.
(14) INTRODUCCIÓN. 2. diferentes ángulos y luego, con los datos de estas medidas, el computador es capaz de reconstruir la imagen de los cortes en una imagen 3D[8, 9].. En los años 80 aparece la tomografía computarizada de haz cónico CBCT [10]. Esta utiliza una tecnología inovadora de adquisición de imágenes, que permite que la imagen sea adquirida como un volumen y no como un plano. Todos estos avances tuvieron una adopción masiva, propiciando importantes avances en la radiología odontológica en los años 90 del pasado siglo y en lo que va del presente, ofreciendo una imagen global del maxilar superior e inferior [11]. La forma de garantizar que una tecnología funcione adecuadamente para los propósitos que ha sido creada es desarrollando un adecuado control de calidad. El control de calidad consta de un conjunto de pruebas para realizar in situ a cada tecnología, basada en normas y criterios de fabricantes, destinadas a medir el desempeño de los mismas cada ciertos períodos de tiempo, también normados [12]. Este aspecto es fundamental para brindar una prestación óptima en la práctica de rutina de los servicios especializados como es el caso de la Odontología. Los controles de calidad se realizan con ayuda de maniquíes físicos [12], sin embargo, estos controles solo aportan criterios de desempeño puntuales que ofrecen una indicación oportuna para el trabajo bajo condiciones seguras con el equipo o para predecir las necesidades de ajustes, calibraciones o reparaciones del mismo, pero no son predictores robustos de calidad de imagen. La aplicación de predictores robustos es una alternativa efectiva para predecir la calidad de imagen que es capaz de generar un equipo ante la variación adquisición / reconstrucción. de los parámetros de. en los equipos de imaginología, siendo la tomografía. computarizada parte de estos. Permite atender con eficacia problemas asociados a ruido aleatorio, resolución espacial y contraste imagen, que se generan durante la adquisición y reconstrucción de las imágenes. Los predictores más robustos conocidos hasta el presente según la literatura científica son la MTF y el NPS[13, 14]. Estos predictores en ocasiones requieren de altas capacidades de cómputo dado el costo computacional que pueden llegar a tener[15]. Por tal motivo, no siempre son adecuados para su aplicación en condiciones de rutina clínica. En la actualidad, gracias al avance de las modernas computadoras, se.
(15) INTRODUCCIÓN. 3. encuentran variantes de cálculo que facilitan su aplicación eficiente, efectiva y eficaz más allá del interés puro de investigación. La MTF es una herramienta matemática que brinda información sobre la resolución y contraste de un medio de adquisición de imágenes, ya que mide cuán fielmente el sistema óptico reproduce o transfiere los detalles del objeto observado a la imagen producida por el mismo [13]. El NPS por su parte, cuantifica las características de frecuencia de las fluctuaciones en la señal de imagen. La forma del NPS revela dónde se concentra la potencia de ruido en el espacio de frecuencias [14]. Debido a que la técnica CBCT es muy moderna y de hecho, es ahora en que se va introduciendo en Latinoamérica, aún no existe un adecuado conocimiento de predicción de la calidad de imagen que se puede obtener con ella específicamente para odontología. Este es el problema de investigación a analizar en la presente tesis. La hipótesis definida es: Puede compararse la calidad de imagen entre equipos digitales para odontología en términos de resolución espacial, contraste imagen y ruido, a partir de la implementación de algoritmos sencillos para el cálculo de medidas robustas como la MTF y la NPS a un bajo costo computacional..
(16) INTRODUCCIÓN. 4. Objetivos:. Objetivo General Comparar el desempeño en cuanto a calidad de la imagen de dos equipos odontológicos modernos utilizando predictores robustos de calidad de imagen como MTF y NPS.. Objetivos específicos . Implementar sobre MATLAB las medidas de calidad de imagen NPS y MTF con bajo costo computacional.. . Evaluar estas medidas sobre el conjunto de imágenes de prueba de un maniquí de líneas obtenidas con los equipos i-Cat Clásico y Prexion 3D.. . Analizar comparativamente el desempeño de los equipos i-Cat Clásico y Prexion 3D.. Organización del informe Este informe está conformado por: introducción, tres capítulos, conclusiones y recomendaciones. El Capítulo 1, consta de 24 cuartillas y brinda una revisión bibliográfica de los temas relacionados con la técnica CBCT, el análisis de la calidad de imagen y los predictores robustos de calidad de imagen. El Capítulo 2, con una extensión de 10 cuartillas, describe los materiales y métodos utilizados para la realización de este trabajo. Por su parte, El Capítulo 3, con 9 cuartillas muestra los resultados obtenidos y además de su análisis y discusión. El trabajo presenta un total de 50 páginas donde se incluyen 48 referencias bibliográficas distribuidas en todo el informe además de un total de 23 figuras, 3 tablas y 4 anexos.. ..
(17) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 5. CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. En este capítulo se exponen las principales características y principios físicos de la técnica de haz cónico, así como la obtención de imágenes mediante CBCT, haciendo especial énfasis en la obtención de imágenes odontológicas para diagnóstico. Posteriormente se realiza un análisis sobre calidad de imagen digital a partir de rayos X y los factores fundamentales que determinan esta. Por último se explica la caracterización de los predictores de calidad de imagen MTF y NPS. 1.1 Odontología La odontología es una ciencia de la salud que se encarga del diagnóstico, tratamiento y prevención de las enfermedades del aparato estomatológico, que incluye los dientes, el periodonto, la articulación temporo-mandibular y el sistema neuromuscular, así como todas las estructuras de la cavidad oral como la lengua, el paladar, la mucosa oral, las glándulas salivales y otras estructuras anatómicas implicadas como los labios, las amígdalas, y la orofaringe [16]. Una forma de estudiar el aparato odontológico es a través de las imágenes médicas. Las imágenes de diagnóstico tienen como propósito asistir al clínico en el diagnóstico de patologías y ayudar a conformar el plan de tratamiento, brindando información precisa de la anatomía del paciente. Son obligatorias para la realización de la mayoría de los estudios odontológicos y la rama que se encarga de su obtención se encuentra en evolución, desde las tradicionales imágenes bidimensionales con rayos X hasta las imágenes volumétricas (3D) como son las tomografías [8, 9]..
(18) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 6. La radiología convencional dental actual se divide en dos grupos de acuerdo con la ubicación del receptor de imagen: la radiología intraoral (cuya película se introduce en la cavidad bucal), y la radiología extraoral (la película se sitúa en un chasis por detrás del objeto estudiado). En estos dos modos, se incluyen todas las modalidades de imágenes radiológicas en odontología: radiografía periapical, oclusal, interproximal, panorámica, cefalométrica y tomográfica) [3] (Figura 1 ). En la actualidad, en su mayoría, existen técnicas digitales para todas estas modalidades de estudios, que no requieren del uso de una película fílmica.. a). d). b). e). c). f). Figura 1 a)Radiografía periapical, b)radiografía oclusal, c) radiografía interproximal, d)radiografía panorámica, e)radiografía cefalométrica, f)cortes tomográfícos dentales. 1.2 Obtención de imágenes con rayos X Los rayos X se producen mediante electrones acelerados por un campo eléctrico, que se hacen chocar con un blanco o foco metálico, originándose así fotones de elevada energía. En el proceso de producción de estos rayos, en un tubo emisor de alto vacío [9] , se emiten electrones por un cátodo que posee un filamento de tungsteno que se calienta haciendo circular por él una corriente eléctrica de cientos de miliamperios (más 200 mA en la mayoría de los casos), ya que a mayor corriente, más electrones se desprenden. Los electrones que se emiten desde el filamento del cátodo son acelerados hacia el ánodo mediante una diferencia de potencial que determina la energía del espectro de rayos X. El ánodo consta de un metal (cobre) donde está inmerso el blanco metálico o foco (de.
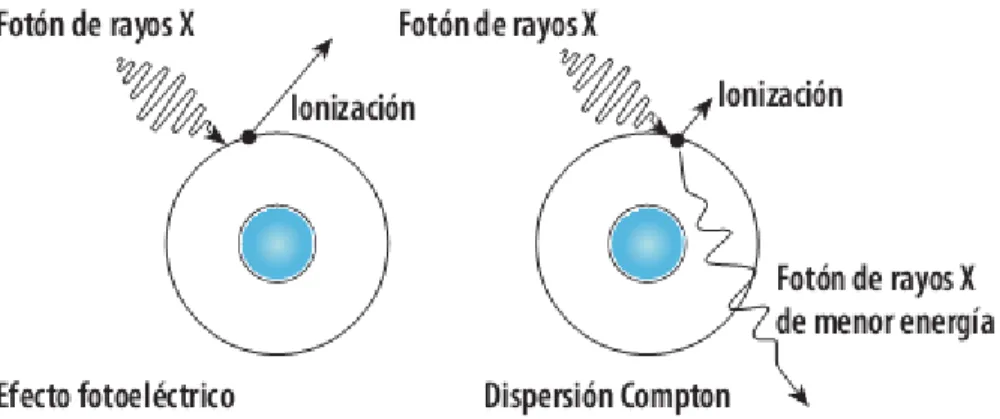
(19) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 7. tungsteno, renio o molibdeno). Entre el cátodo y el foco del ánodo se establece una elevada diferencia de potencial producida por el generador de alta tensión (generalmente 80kV). Al chocar los electrones con el ánodo metálico, se desaceleran bruscamente; este mecanismo de frenado produce rayos X de mayor o menor energía media dependiendo del voltaje del tubo de rayos X utilizado, emitiéndose en forma de un espectro continuo (rayos X policromáticos). Además de este mecanismo de frenado, los electrones interactúan con los electrones de los átomos del ánodo, excitándolos; ello produce secundariamente la emisión de fotones de rayos X característicos monocromáticos (Figura 2) [9].. Figura 2: Tubo de Rayos X Los Rayos X para ser utilizados en la formación de imágenes de CBCT, deben colimarse de modo que se obtenga un haz cónico de rayos X. En las fuentes de rayos X para uso médico se utilizan diversos elementos para colimar los rayos X y conseguir así la geometría deseada del haz y son a base de carcasas y láminas de plomo que absorben los rayos X dirigidos en las direcciones no deseadas [17]. El cuerpo humano es muy transparente a los rayos X por lo que al incidir el haz de rayos X, una parte de los fotones interactúan por absorción o dispersión y la mayoría atraviesan la materia en línea recta, sin interactuar con ella, atenuándose más o menos a su paso [17]. La interacción de los rayos X con los tejidos del organismo humano se produce a través de uno de los dos siguientes fenómenos físicos: Efecto fotoeléctrico: un fotón X interactúa con la envoltura electrónica de un átomo del medio y es absorbido. Cede toda su energía a un electrón que es liberado (fotoelectrón). El.
(20) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 8. átomo queda así ionizado. Este efecto predomina a bajas energías del haz de rayos X y aumenta con los números atómicos altos [18]. Dispersión de Compton: un fotón X interactúa con la envoltura electrónica de un átomo, cede parte de su energía por lo que aumenta su longitud de onda (λ) y es desviado. El átomo se ioniza al liberarse un electrón. Este fenómeno predomina a altas energías y depende de la densidad física del medio atravesado. Es la causa de la denominada radiación dispersa, que consiste en fotones de rayos X que no siguen la dirección original de los rayos X incidentes, sino que proceden de muchas direcciones diferentes al haber sido dispersados (Figura 3) [18].. Figura 3: Procesos de interacción de los Rayos X con la materia 1.3 Imagen digital. Una imagen digital se define como una función de dos variables, f(x, y), donde x e y son coordenadas espaciales y el valor de f en un punto dado es la intensidad de la imagen en dicho punto. Se componen por matrices cuadradas compuestas por un número limitado de elementos, cada uno de los cuales se denomina pixel (del inglés picture element) y tiene un único valor, color o tono, asignado durante el proceso de adquisición o procesamiento [19]. Pueden ser obtenidas a partir de diversos principios físicos. El que involucra a los rayos X anteriormente explicado en este trabajo, puede tener diversas modalidades como son la radiografía computarizada (CR), radiografía digital (DR) [17], la tomografía computarizada (CT) [9], la tomosíntesis [20] o la CBCT [10, 21]. La combinación de factores hace que cada modalidad para obtener imágenes médicas sea única; estas son: las características del.
(21) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 9. tejido que son visibles en la imagen y la perspectiva que se obtiene del objeto como resultado de utilizar una modalidad determinada y no otra. 1.4 Tomografía Computarizada de haz cónico. La tomografía computarizada (TC) consiste en la utilización de un haz de rayos X que es colimado muy finamente y un único detector. Ambos se encuentran conectados de modo que se desplazan en forma sincronizada cuando el par fuente - detector, ejecuta un barrido. Así, cuando las estructuras internas del cuerpo atenúan el haz de rayos X según el correspondiente valor de número atómico y densidad de masa de cada tejido, la intensidad de la radiación detectada variará y conformará un perfil de intensidad denominado proyección. Al terminar la rotación, el par fuente -detector regresa a su posición de inicio y el par completo puede girar para iniciar una segunda rotación. Estas proyecciones son almacenadas en un ordenador que las procesa para reconstruir una imagen 3D final de las estructuras anatómicas, que mediante el uso de ecuaciones simultáneas consigue una matriz de valores que representa la sección transversal de la estructura anatómica que fue sometida a examen (corte tomográfico) [7]. En el momento de su introducción clínica en 1971, era una modalidad de rayos X que permitía obtener únicamente imágenes axiales del cerebro, de interés en neuroradiología [7]. Pero con el paso del tiempo se ha convertido en una técnica de imagen versátil, con la que se obtienen imágenes tridimensionales de cualquier área anatómica, útiles para obtener con relativa facilidad imágenes tridimensionales (3D) de cerebro, corazón, sistema músculo-esquelético, o imágenes de cuerpo entero [18]. En la últimas décadas surgió una técnica novedosa a partir de la CT convencional, que ha sido principalmente aplicada en odontología: la tomografía computarizada de haz cónico (CBCT). Utiliza una tecnología innovadora en la adquisición de la imagen: el haz cónico de rayos X (Figura 4). Esta técnica permite que la imagen sea adquirida como un volumen tras una sola rotación del tubo de rayos X. Fue desarrollada como una alternativa a la TC convencional utilizando haz en abanico o geometría espiral-scan. Permite una más rápida adquisición del conjunto de datos de todo el campo de visión y utiliza un detector de radiación comparativamente menos costoso. Las ventajas de estos sistemas se basan en que proporcionan un tiempo de exploración más corto, mejoran la resolución espacial de las.
(22) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 10. imágenes y reducen la distorsión de la imagen debido a los movimientos internos del paciente [21, 22]. En comparación con la TC convencional, presentan además, un aumento de la eficiencia del tubo de rayos X. Sin embargo, su principal desventaja, especialmente en las de mayor campo (FOV del inglés Field of View), es la limitación en la calidad de imagen debido a ruido y contraste, por la inclusión de grandes cantidades de radiación dispersa [21].. Figura 4: Geometría de haz cónico 1.4.1 Obtención de las imágenes digitales en CBCT. Las imágenes de tomografía computarizada de haz cónico (CBCT) son creadas a través de cortes transversales de un vóxel del objeto, que se adquiere durante una rotación del haz de rayos X. Aquí se unen numerosas imágenes de proyección sobre el objeto en el plano de interés (Figura 5)..
(23) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 11. Figura 5: Obtención de imágenes de CBCT Una imagen de proyección es una imagen unidimensional en la que el brillo de cada píxel se corresponde con la absorción de rayos X en la sección correspondiente del objeto. Combinando las múltiples vistas de proyección, se sintetiza la imagen del corte transversal. Según el plano de orientación existen tres tipos de cortes: axial, coronal y sagital [10].. Figura 6: Cortes planales..
(24) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 12. En CBCT estos cortes se logran utilizando una rotación del gantry al que se fija una fuente de rayos X y el detector (generalmente un Flat panel). La fuente es piramidal divergente o en forma de cono y dirige la radiación a través del medio de la zona de interés hasta el detector de rayos X situado en el lado opuesto (Figura 7).. Figura 7: Exploración CBCT Estos escáneres dan como resultado una gama de exploración con un FOV más restringida en la dimensión axial que en CT médica tradicional, aunque el FOV pueda variar desde pequeños campos para imágenes dentales a grandes campos para otros exámenes faciales. Los posibles FOV dependen principalmente del tamaño del detector y su forma, la geometría de proyección del haz y la capacidad para colimar el haz [21]. Algunas máquinas permiten que el FOV sea seleccionado para satisfacer el examen particular. Las opciones del modo FOV pueden incluir facial, panorámica, implante y dental [16]. Los detectores deben ser capaces de registrar los fotones de rayos X, leer fuera y enviar la señal a la computadora, y estar listos para la adquisición de cientos de fotones X a la vez en una sola rotación. La rotación se realiza por lo general dentro de los tiempos de 10-30 segundos, lo que requiere de tiempos de adquisición de imagen y velocidad de procesamiento de milisegundos [11]. Los equipos de CBCT actuales pueden ser divididos en dos grupos basándose en el tipo de detector utilizado: tubo intensificador de imagen / dispositivo de carga acoplada (Charge couple device: CCD) o un Flat panel (Figura 8). Ambos sistemas son digitales, ellos captan.
(25) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 13. proyecciones 2D individuales con píxeles que luego pueden ser procesados digitalmente [23]. El primer tipo mencionado está conformado por un tubo intensificador de imagen acoplado a un CCD con una fibra óptica. El haz de radiación es convertido a una señal óptica por los cristales de Ioduro de Cesio en la pantalla fosfórica de entrada, y luego son convertidos a fotoelectrones por la pantalla del fotocátodo. Esos electrones luego son acelerados por el campo eléctrico dentro del intensificador de imagen y convertidos en una señal óptica en la pantalla fosfórica de salida, que es detectada por el CCD [22]. El detector plano funciona con un detector indirecto que está conformado por sensor sólido acoplado a una capa de centellador. Los más comunes están compuestos por Ioduro de Cesio aplicado a una delgada capa de transistor de silicio amorfo. El centellador convierte el haz de radiación en una señal óptica, la cual es convertida en una señal eléctrica por el fotodiodo y posteriormente convertida en datos por el dispositivo de conversión, ubicado en la matriz del fotosensor [13].. a). b) Figura 8: Detectores de imagen a) Flat Panel b) CCD.
(26) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 14. 1.4.1.1 Reconstrucción Tomográfica en CBCT La reconstrucción de la imagen es un procedimiento que garantiza una base segura para el diagnóstico y/o uso clínico de las imágenes. Depende de la atenuación de los rayos X, la retroproyección y las ventanas utilizadas [13]. La reconstrucción de objetos 3D a partir de las proyecciones de haz cónico consta de dos etapas: . Etapa de adquisición.. . Etapa de reconstrucción.. En la etapa de adquisición, las imágenes adquiridas deben ser corregidas por imperfecciones de píxel y exposición desigual. La calibración de la imagen debe ser realizada rutinariamente para remover estos defectos. Por su parte, en la etapa de reconstrucción, las imágenes corregidas son convertidas en una representación especial llamada sinograma. Este es una imagen compuesta, desarrollada al extraer una línea de píxel. de cada imagen de proyección, que será reconstruida con un algoritmo de. retroproyección filtrada para las proyecciones de haz cónico adquiridas a lo largo de una trayectoria circular para los datos volumétricos. Este algoritmo es de carácter analítico y está basado en la transformada de Radón [7], y el teorema del “corte de Fourier” [24]. Su uso se generalizó a pesar de tener el inconveniente de generar un artefacto típico denominado “estrella” que degrada sensiblemente la calidad de las imágenes [24]. Los tiempos de reconstrucción varían, dependiendo de los parámetros de adquisición (tamaño de vóxel, FOV y número de proyecciones), la velocidad de hardware (procesador, rendimiento de los datos desde la adquisición hasta estación de trabajo) y el software (algoritmos de reconstrucción) utilizados. El utilizado en CBCT se nombra algoritmo de Feldkamp y se basa en el método de Feldkamp, Davis y Kress (FDK) [25]. 1.4.1.1.1 Algoritmo de reconstrucción de Feldkamp para CBCT El algoritmo FDK es una extensión empírica 3-D del algoritmo estándar de retroproyección filtrada 2-D de haz en abanico [25]. Consideramos las proyecciones como una función f(r,z) medido para el vértice de un cono centrado en un círculo en el plano z = 0 , y puntos de FOV considerados vectores.
(27) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 15. , para I(x,y,z), mientras que en el eje z se considerara también a r como un vector ortogonal de dicho eje . La posición del vértice del cono es: ( ). ( ). λ. ). donde λ es el ángulo que describe la rotación del vértice del cono, ( ). la órbita, y. (1) es el radio de. es un vector unidad apuntando desde el origen del. sistema de coordenadas hacia el vértice del cono. Suponemos que la función f es suave y se desvanece fuera del cilindro:. {(. ). || ||. | |. }. (2). La imagen reconstruida a partir de una retroproyección CB estará dada entonces por:. (. ). ∫. ( )). (. (. ) , ||r||<R. (3). donde:. (. ). (. ). ( ) ( ). ( ). (4). (5). A pesar de su carácter aproximado, es ampliamente utilizado, debido a la duración, simplicidad y facilidad de implementación del algoritmo y a partir de su buena solidez a los artefactos causados por algún cono incompleto de la órbita circular. La buena precisión del algoritmo FDK a menudo se relaciona con tres conocidas propiedades: . La reconstrucción es exacta en el plano de la circular órbita de la fuente de rayos x.. . La reconstrucción es exacta para cualquier objeto que sea invariante para traslaciones en la dirección axial-ortogonal al plano de la órbita..
(28) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. . 16. La integral de la imagen reconstruida a lo largo de alguna línea axial-ortogonal al plano de la órbita es exacta, es decir, el valor de integral que coincide con el valor de la integral de línea correspondiente del objeto real [25].. 1.5 Calidad de imagen La calidad de la imagen es una medida del funcionamiento de un sistema generador de imágenes utilizado para un determinado tipo de examen. En general, en la práctica de rutina las mediciones de calidad de imagen están enfocadas a dos elementos esenciales: la medición de la nitidez de la imagen inherente al diseño de la instrumentación (resolución espacial); y el ruido de la imagen que crece con las fluctuaciones de los fotones de las fuentes de energía, y del ruido electrónico acumulado en la cadena de generación de la imagen. Sin embargo, desde el punto de vista físico se consideran los siguientes cinco factores como los que mejor caracterizan el nivel de calidad de una imagen: •. Ruido.. •. Presencia de artefactos.. •. Distorsión.. •. Resolución espacial del sistema de detección. •. Contraste imagen.[26]. El ruido: es considerado como cualquier perturbación sobre una señal, ya sea analógica o digital. Tomando como referencia imágenes digitales como señal, el ruido puede ser caracterizado como aleatorio o estructurado. En el primer caso es causado por variaciones estadísticas en las razones de conteo que se reflejan en un efecto de moteado sobre la imagen, y se concentra mayormente en las bandas de alta frecuencia. Depende del tamaño de la matriz de adquisición que, a su vez, determina el tamaño del pixel. Matrices más grandes contienen más estadística de cuentas en sus píxeles y, por tanto, menos ruido [27]. Igualmente, depende del espesor del corte, siendo los cortes más finos los que menor estadística incluyen y por tanto mayor nivel de ruido. Sin embargo, el factor determinante en el nivel de ruido aleatorio de una imagen de rayos X es la corriente de tubo utilizada y el tiempo de exposición. Mientras mayor es el mAs, mayor cantidad de electrones se desprenden del filamento y mayor número de rayox X se generan, aumentando la.
(29) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 17. información útil sobre la imagen y disminuyendo el ruido. El ruido estructurado en cambio es parte de toda la señal y depende de la cadena de medición. El ruido puede ser aditivo o multiplicativo en dependencia del modelo. En imágenes por rayos X la naturaleza probabilística del proceso anteriormente descrito hace que responda a una estadística de Poisson el cual no es aditivo sino que está correlacionado con la información de cada pixel de la imagen. [28]. Los artefactos: son todos los elementos introducidos en la imagen durante su captura, digitalización o cualquier otro proceso que se lleve a cabo, que no pertenezcan al objeto original monitorizado. Aparecen como degradaciones perceptibles de la imagen. Su origen puede estar en el hardware, como la línea de 60 Hz o en movimientos voluntarios o involuntarios del propio paciente: la respiración, el palpitar del corazón, etc. [29]. La distorsión: se describe a través de la linealidad espacial. La misma expresa el grado de distorsión espacial introducida por el instrumento en la posición de incidencia de los fotones que alcanzan el detector, caracterizando el grado de linealidad- absoluta (LA), diferencial (LD) en la imagen de la fuente [29]. La LA representa el desplazamiento espacial máximo (en milímetros) con respecto a una línea recta, observado en la imagen de una fuente lineal. La LD representa el desplazamiento espacial máximo (en milímetros) con respecto a una línea recta, observado en la imagen de una fuente lineal y expresa la variabilidad de la linealidad y se define como la desviación típica (expresada en milímetros) de la separación entre los dos picos de todas las posibles funciones de densidad probabilísticas de dos fuentes lineales paralelas separadas a una distancia conocida [29]. La resolución espacial o resolución de alto contraste: se refiere a la nitidez o detalles visibles de la imagen y se define como la distancia mínima a la que pueden estar dos puntos para que sean detectados como separados en la imagen [29]. La resolución espacial se expresa preferentemente como la respuesta a una función d, con la función de dispersión de punto (PSF) para caracterizar la resolución espacial en el plano axial, o con el perfil de sensibilidad de una sección (SSP) para la resolución espacial a lo largo del eje z. La respuesta se suele cuantificar como la valores de la anchura a la mitad de la altura máxima (FWHM, del ingles Full width at half maximum) en el plano axial [30]. La forma más.
(30) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 18. robusta de estimarla es calculando el módulo de la Transformada de Fourier de la PSP, obteniendo la MTF. El contraste imagen: se define como la diferencia de intensidades en distintas zonas de una imagen y puede especificarse como la razón de cambio en el conteo de una determinada región con relación al nivel de señal en los alrededores. Por lo tanto, mientras mayor sea la diferencia entre la densidad de conteos en un espacio con respecto al fondo, mayor será el contraste imagen[27]. 1.5.1 Parámetros operacionales que determinan la calidad de imagen en CBCT La calidad de la imagen en los equipos de CBCT está determinada por los parámetros operacionales de los equipos: Voltaje pico (kVp), Corriente aplicada en un intervalo de tiempo (mAs) y espesor de corte, fundamentalmente [10]. Voltaje pico (kVp): Como la tensión aplicada al tubo de rayos X, que puede variar a causa del ciclo de corriente alterna de las redes eléctricas, durante la exposición, el kVp determina, en un ciclo de tensión, la máxima energía de los fotones y regula la máxima energía del espectro de rayos, la cual es proporcional al cuadrado del kilovoltaje nominal del tubo de rayos X (kV). La energía de los fotones es inversamente proporcional a la atenuación en el cuerpo del paciente, lo que aumenta la penetración de la radiación provocando una reducción en el contraste imagen. Por el contrario, una mayor atenuación, producto de un menor kVp, mejora el contraste imagen aunque incrementa además la dosis que recibe el paciente [27]. Para lograr una buena trasmisión de rayos X y que llegue suficiente señal al detector se emplean valores relativamente altos de la tensión del tubo (120 - 140 kV) aunque se haga uso de tensiones del tubo más bajas (80 a 100 kV) para ciertas aplicaciones especiales, tales como estudios con realce de contraste [10]. Corriente de Tubo (mAs): representa la cantidad total de electrones emitidos por unidad de tiempo. Es el producto de la corriente que circula por el tubo de rayos X en (mA), y el tiempo en segundos y determina la cantidad de rayos X emitidos que alcanzan el detector [27]. El aumento del mAs conlleva a una mejoría de la sensibilidad contraste-detalle, producto del efecto de disminuir el ruido, aunque incrementa la dosis absorbida por el paciente [27]..
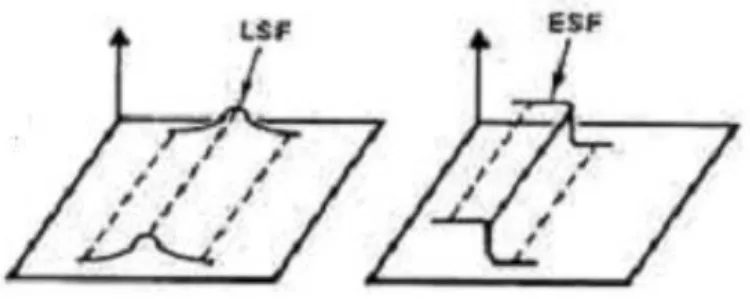
(31) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 19. Espesor de corte: se define como el espesor de corte del haz de rayos X en la dirección z del objeto o el paciente. Al disminuir el espesor de corte, la resolución espacial en el plano mejora, por lo tanto se podrán apreciar un mayor número de detalles en las imágenes, sin embargo incrementa el ruido. Las reconstrucciones de CBCT en la actualidad se suelen hacer con un espesor de corte inferior a 1 mm [10]. La forma particular en que la variación de estos parámetros de adquisición determina los niveles de calidad de imagen para cada sistema de adquisición es desconocida y constituye un problema a resolver en la práctica de rutina de los controles de calidad. Estos controles constan de un conjunto de pruebas para realizar in situ a cada tecnología, basada en normas y criterios de fabricantes, destinadas a medir el desempeño de los equipos cada ciertos períodos de tiempo, también normados, realizados con la ayuda de maniquíes físicos [12]. Sin embargo, estos controles solo aportan criterios de desempeño puntuales. Ellos ofrecen una indicación oportuna para el trabajo bajo condiciones seguras con el equipo o para predecir las necesidades de ajustes, calibraciones o reparaciones del mismo. Sin embargo, los resultados del control de calidad no son predictores robustos de calidad de imagen ya que no permiten estudiar el comportamiento de la resolución espacial, el ruido y el contraste en todo el rango de frecuencias o vincular simultáneamente más de un parámetro. Los predictores de calidad brindan información sobre la calidad de imagen de un sistema de adquisición integralmente. Los predictores más robustos de reconocidos en la literatura científica son la MTF y la NPS [13, 14]. 1.6 Función de transferencia de la modulación. La función de transferencia de la modulación (MTF, del inglés Modulation Transfer Function) es un parámetro objetivo de calidad de la imagen, que aporta información sobre el funcionamiento y la calidad de un sistema óptico y se define como la relación entre la amplitud de salida y de entrada expresada como función de la frecuencia espacial. En otras palabras, la MTF es una medida del desempeño de un sistema del imaginología digital que describe las características de trasferencia señaladas como una función de la frecuencia espacial [31]..
(32) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. La MTF es además una herramienta matemática que brinda. 20 información sobre la. resolución de un medio de adquisición de imágenes ya que mide cuán fielmente el sistema óptico reproduce o transfiere los detalles del objeto observado, a la imagen producida por el mismo. Matemáticamente, es la magnitud de la Transformada de Fourier de la función de dispersión de línea del sistema (LSF, del inglés Line Spread Function) y está dado por la ecuación (6) donde la LSF representa la distribución de niveles de gris a ambos lados de las líneas representativas de una resolución espacial específica. La LSF se obtiene a partir de la función de dispersión de borde (ESF, del inglés Edge Spread Function) (ecuación 7) y en esta nueva distribución de niveles de gris de la imagen la línea referencial se verá como un escalón unitario ( Figura 9) [29, 32].. Figura 9: Representación de la LSF y ESF La MTF es una función unidimensional, es decir, que mide la resolución espacial solamente en una dirección determinada y es de carácter multiplicativo. Significa que si en una imagen obtenida por un sistema, este contiene n componentes, cada una tendrá su propia MTF y la MTF total será el producto de las mismas. Esto implica que si algunas de las MTFs tienen un valor bajo, se producirá una caída en la MTF total del sistema [29].. F( ). |F. F( )]|. |∫. F( ). ]|. (6). donde x es el valor de intensidad del pixel. F( ). ( )]. (7). En la ecuación (6) se observa que la MTF mide la modulación de amplitud (o nivel de gris) de una imagen con un patrón de líneas. El tamaño de la modulación determina la calidad del sistema para un frecuencia u dada. Si la MTF (v)=0 para v>u, entonces el sistema no podrá resolver frecuencias espaciales mayores a “u”, es decir. cuando la MTF tiene.
(33) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 21. magnitud normalizada unitaria, el patrón de líneas alternas no se altera. A medida que la frecuencia espacial (líneas-m-1) del patrón se incrementa (Figura 10), la magnitud de la MTF disminuye y con ella el contraste entre las líneas. Se trata en este caso de medir cómo transfiere ese sistema óptico cada frecuencia espacial a través de sí, para formar la imagen. Dicho de otro modo, dado un objeto que cuenta con varias frecuencias espaciales, la MTF informa de cómo se atenúan los contrastes (modulaciones) al formar la imagen [13].. Figura 10: Representacion de frecuencia espacial. La principal desventaja del cálculo de la MTF es que para algunos algoritmos de alta precisión como el descrito por K. Boedeker y M. McNitt-Gray en [14] es que el costo computacional es muy alto, necesitándose en algunos casos más de 15 horas de cómputo en un clúster de computadoras. Sin embargo, los algoritmos basados en mediciones a partir de un maniquí de línea son mucho más rápidos en su implementación y presentan aceptable precisión [15]. En este último caso dependen casi en su totalidad del maniquí utilizado y muchos tomógrafos en la actualidad poseen software que permiten su determinación de forma eficiente. 1.7 El espectro de potencia del ruido. El espectro de potencias del ruido (NPS del inglés Noise Power Spectrum) es la descomposición espectral del ruido de la imagen, por lo que proporciona la descripción más completa del mismo y se considera la métrica más adecuada para valorar la capacidad de detección de objetos de un determinado sistema de imagen [33]. La forma de la NPS revela dónde la potencia de ruido se concentra en el espacio de frecuencias. Una concentración de potencias de ruido de baja frecuencia significa que el ruido tendrá un grado de aspereza grueso. Por el contrario, si existe una concentración de potencia de ruido en las altas frecuencias, este será de un grano más fino [14]..
(34) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 22. En 1978 Riederer demostró que el número de variaciones aleatorias en TC en un punto de una imagen no era independiente de la variación aleatoria en otros puntos [34]. Estas correlaciones espaciales pueden ser completamente descritas por la función de autocorrelación o por su transformada de Fourier. Riederer utilizó el modelo de convolución de retroproyección continua para predecir la imagen del espectro de potencia de ruido de la proyección del NPS, asumiendo que el ruido en las proyecciones no está correlacionado (ruido blanco). Asumiendo ruido blanco en todas las proyecciones, dos trabajos diferentes derivan una expresión analítica para el NPS de imágenes obtenidas mediante retroproyección filtrada con un filtro tipo rampa y teniendo en cuenta el efecto del muestreo angular en las proyecciones adquiridas, donde utilizan la transformada de Fourier de imágenes de ruido para determinarla varianza de la potencia de ruido presente en cada frecuencia espacial [34]. En 1984 la NPS fue representada matemáticamente por Faulkner y Moores [35]:. (. ). (. )(. F. (. )). (8). donde: . es el promedio de fotones en una proyección. . es el número de proyecciones. . es la frecuencia espacial representa la longitud de una proyección MTFalg es el algoritmo de la MTF (que es una porción total de la MTF asociada con. convolución del Kernel) a frecuencia discreta que prueba el incremento y. donde. representa la frecuencia. es un valor del entero [14].. En el 2002 Siewerdsen, Cunningham y Jaffray [36] se apoyaron en las muy conocidas propiedades de la Transformada de Fourier dimensional para desarrollar una expresión de la NPS aplicable para señales n-dimensionales. La expresión generalizada se redujo a los casos familiares: n=1(serie temporal) y n=2 (proyección radiográfica) (ecuación 4), y fue demostrada experimentalmente para n=3 (proyección volumétrica). La expresión para n=2 es:.
(35) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. ( v). (| FD(. )| ). 23 (9). con:. − E⌊. ⌋. donde: . : valor de píxel en la posición (n,m). . 𝐸⌊. . 𝑝 : tamaño de pixel. . ⌋:el valor medio de píxel en la ROI. y. : tamaño de la matriz en las direcciones x e y. (10).
(36) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 24. Conclusiones del capítulo En este capítulo se ha expuesto el principio físico de funcionamiento de la técnica CBCT, así como los parámetros de adquisición que determinan la calidad de las imágenes que generan, que en esencia son el mAs, el espesor de corte, el kVp y el FOV. Se han expuesto los predictores más robustos de calidad de imagen que reconoce la literatura científica actualmente: la MTF y el NPS, dado su incuestionable valor para evaluar simultáneamente la resolución espacial, el contraste imagen y el ruido aleatorio obtenido con los equipos imaginológicos (incluida la CBCT). Implementar dichos predictores en condiciones de rutina clínica en tiempo real puede no ser muy eficiente, dado que pueden llegar a tener un alto costo computacional. Sin embargo, la valiosa información que brindan puede y debe complementar el control de calidad habitual que se realiza a estos equipos, por lo que implementar variantes sencillas puede ser muy útil para evaluar el desempeño de los mismos..
(37) CAPÍTULO 2. MATERIALES Y MÉTODO. 25. CAPÍTULO 2. MATERIALES Y MÉTODOS. En el presente capítulo se describen los materiales y métodos utilizados en esta investigación. Inicialmente se presentan las características de los equipos utilizados para adquirir las imágenes así como el maniquí físico utilizado. Después se detallan las condiciones de adquisición de las imágenes utilizadas y las regiones de interés (ROI) seleccionadas. Para finalizar se describe, la implementación de los predictores de calidad de imagen seleccionados. 2.1 Equipamiento. Para la investigación se utilizaron dos tomógrafos de haz cónico para exploración dental: i-Cat Clásico y Prexion 3D ( Figura 11). Ambos se utilizaron con el objetivo de generar imágenes de un maniquí físico diseñado para mediciones de MTF y NPS.. a) Figura 11: Tomógrafos a) i-Cat Clásico b) Prexion 3D. b).
(38) CAPÍTULO 2. MATERIALES Y MÉTODO. 26. 2.1.1 Tomógrafo i-Cat Classic. El i-Cat Clásico posee un campo de vista (FOV, Field of View de sus siglas en inglés) variable: mediano (60-80x160 mm) y grande (130x160 mm). El gantry puede rotar en 360º y es capaz de adquirir entre 306 a 599 imágenes en dicha rotación [37].. Características técnicas del equipo: Detector: CsI FPD Voltaje nominal: 120 kV Corriente nominal: 5 mA Corriente de tubo por tiempo : 19 mAs Resolución del detector: 608 x 616 píxeles, 200 μm Tamaño de voxel: 0,2 a 0,4 mm Tiempo de captura (en una rotación) para FOV grande: 8.9 s y para FOV mediano: 20 s. 2.1.2 Tomógrafo Prexion 3D. El Prexion 3D trabaja solamente con un FOV pequeño de 75 x 81 mm y rotación de 360º con haz continuo, capaz de adquirir hasta 1024 imágenes [38]. Características técnicas del equipo: Detector: CsI FPD Voltaje nominal: 90 kV Corriente nominal: 4 mA Corriente de tubo por tiempo: 76 mAs Resolución del detector: 608 x 616 píxeles, 200 μm Tamaño de voxel: 0,15 mm Tiempo de captura (en una rotación): 19 s.
(39) CAPÍTULO 2. MATERIALES Y MÉTODO. 27. 2.2 Maniquí físico. Para el experimento se utilizó el maniquí de Garantía de Calidad (QA Phantom, por sus siglas en ingles). Este es un maniquí de líneas con diámetro de 16 cm y altura de 6 cm, compuesto en su mayoría de acrílico y provisto de tres orificios de aire, teflón y polietileno de baja densidad (LDPE, por sus siglas en ingles). En su centro se encuentran pares de líneas que van desde 10 lp cm-1 a 16 lp cm-1. Esta zona de líneas es particularmente útil para la medición de la MTF (Figura 12 y Figura 13) [39].. Figura 12: Maniquí físico. Figura 13: Imagen de la zona de líneas.
(40) CAPÍTULO 2. MATERIALES Y MÉTODO. 28. 2.3 Adquisición de las imágenes. Las imágenes se obtuvieron en una clínica en Recife, Brasil, con dos equipos odontológicos modernos de CBCT: i-Cat Clásico y Prexion 3D. Para la realización del experimento no se utilizaron las imágenes de todos los cortes, sino solo de aquellos en los que se pudiera observar la zona de líneas del maniquí (Figura 14 ).. a). b). Figura 14: a) i-Cat Clásico b) Prexion 3D Del i-Cat Clásico se seleccionaron 10 imágenes con tamaño 800 x 800 píxeles y una profundidad de bits de 8 bits por píxel (bpp). Por su parte, del Prexion 3D se seleccionaron 25 imágenes con tamaño 512 x 512 píxeles y una profundidad 8 bpp. La base de datos ocupó 1.57 MB en memoria y la totalidad de las imágenes están en formato jpg. La base de datos idónea para este experimento hubiese debido contar con imágenes en formato DICOM. Sin embargo, solo contábamos con la data DICOM del i-Cat Clásico, mientras que la del Prexion 3D tenía formato jpg, por lo que se decidió convertir todas las imágenes a jpg para homogeneizar las condiciones experimentales teniendo como limitación de partida cierto grado de compresión en las imágenes. Esta limitación en nuestra opinión no demerita el valor de los resultados del trabajo ya que se conoce que el ojo humano es incapaz de discriminar más allá de los 5 bpp en profundidad[40].. En la Tabla 1 se muestran las condiciones de adquisición de las imágenes utilizadas en esta investigación..
(41) CAPÍTULO 2. MATERIALES Y MÉTODO. 29. Tabla 1: Condiciones de adquisición de las imágenes Tomógrafo. Cantidad. Tiempo. Corriente. Potencial. Espesor. de. de. de tubo. del tubo. de corte. imágenes adquisición i-Cat Clásico. 10. 20 s. 23.87mAs. 120 kV. 0.3 mm. Prexion 3D. 25. 16.9 s. 76.00 mAs. 90 kV. 0.15 mm. 2.4 Software de cálculo Para la realización del experimento se trabajó sobre la implementación de funciones y trabajos matriciales con imágenes del maniquí físico. Teniendo en cuenta que Matlab es un poderoso software de experimentación orientado al trabajo con matrices y que cuenta, además con un amplio grupo de herramientas, especialmente para procesamiento digital de imágenes el Image Processing Toolbox, se decidió utilizarlo para la implementación de las dos funciones que permiten calcular los predictores de calidad de imagen: MTF y NPS, así como la manipulación necesaria de las imágenes seleccionadas para el experimento. 2.5 Regiones de interés Las imágenes de los dos equipos fueron promediadas y en las imágenes resultantes se seleccionaron las regiones de interés (ROI del inglés Region of Interest) y se calcularon los predictores de calidad de imagen. Las ROI fueron seleccionadas de forma manual (ver Anexo 1 y Anexo 2) y responden específicamente a las características del experimento. Es por ello que se concibieron como un rectángulo de dimensiones arbitrarias, que encerrara la zona de líneas del maniquí para el cálculo de la MTF (Figura 15) y se desplazara para seleccionar una región ruidosa efectiva para el cálculo del NPS..
(42) CAPÍTULO 2. MATERIALES Y MÉTODO. a). 30. b). Figura 15: Selección de región de interés a) i-Cat Clásico b) Prexion 3D. El hecho de que las ROI para el cálculo de ambos predictores, en el mismo tomógrafo, sea la misma; es necesaria para la homogeneidad y confiabilidad de los resultados.. 2.5.1 Particularidades de la región de interés para el cálculo de la MTF La ROI para el cálculo de la MTF, fue obtenida de forma manual usando la función getrect del Image Processing Toolbox del Matlab. En las imágenes obtenidas con ambos equipos, la ROI, contiene la zona de líneas del maniquí y tiene forma rectangular (Figura 16). De ahora en lo adelante lo nombraremos como rectángulo de referencia. En el i-Cat Clásico la ROI es de 33 x 208 píxeles, mientras que en el Prexion 3D es de 39 x 389 píxeles..
(43) CAPÍTULO 2. MATERIALES Y MÉTODO. 31. a). b) Figura 16: ROI para el cálculo de la MTF a) i-Cat Clásico b) Prexion 3D. 2.5.2 Cálculo de la MTF La MTF fue obtenida utilizando el método de borde [41] donde la ROI es normalizada para obtener un arreglo de 1024 puntos en cada fila, independientemente de la dimensión en el eje x de la misma. La matriz normalizada mantiene la zona de líneas seleccionada con anterioridad con diferencias visibles de intensidad a ambos lados de esta. La distribución de niveles de gris de la imagen a ambos lados de las líneas es considerada como la función de dispersión de borde del sistema [29]. La función de dispersión lineal se determinó a partir de la diferencia de intensidad entre los puntos adyacentes en la matriz y se obtuvo como la derivada de la ESF como se expresa en la ecuación (7). Una vez obtenida la LSF, se utilizó el concepto físico que plantea que el módulo de la transformada de Fourier de la LSF es la Función de Transferencia de la Modulación [29] como se describe en la ecuación (11):. F( ). |F. F( )]|. (11). Esta ecuación describe la magnitud de la señal transferida para cada frecuencia espacial (f)..
(44) CAPÍTULO 2. MATERIALES Y MÉTODO. 32. La transformada de Fourier se calculó utilizando la función pwelch del Image Processing Toolbox de Matlab, que estima los espectros de potencia de una sección a partir de promediar sus periodogramas [42]. Con este procedimiento se obtuvo un valor de MTF para cada fila (Anexo 3). La condición isotrópica de las frecuencias espaciales en el plano de escaneo de equipos de tomografía nos permite promediar las MTFs obtenidas [32]. El valor final de la función en cuestión fue normalizado de forma unitaria en aras de hacer más simple la comprensión de los resultados.. 2.5.3 Particularidades de la región de interés para el cálculo del NPS Para determinar la NPS, las ROI fueron obtenidas a partir de traslaciones del rectángulo de referencia que se utilizó para el cálculo de la MTF, por lo que preservaron las mismas dimensiones: 33 x 208 píxeles en el i-Cat Clásico y 39 x 389 píxeles en el Prexion 3D (Figura 17). En las imágenes del i-Cat Clásico se realizaron traslaciones en dos direcciones (arriba y abajo de la zona de líneas del maniquí) (Figura 18a). Por su parte, las imágenes del Prexion 3D solo posibilitaron realizar ambas traslaciones en una solo dirección (abajo de la zona de líneas de maniquí) (Figura 18b). En ambos casos se obtuvieron dos regiones de iguales dimensiones que se promediaron para obtener una ROI definitiva. Esto garantiza mayor exactitud en el experimento, pues contrarresta el hecho de seleccionar una región provista de un pico de ruido.. a). b) Figura 17: ROI para el cálculo de la NPS a) i-Cat Clásico b) Prexion 3D.
(45) CAPÍTULO 2. MATERIALES Y MÉTODO. 33. a) b) Figura 18: Deplazamiento de la ROI a) i-Cat Clásico b) Prexion 3D. 2.5.4 Cálculo del NPS El método utilizado para el cálculo del NPS se apoyó en los trabajos de Siewerdsen, Cunningham y Jaffray [36]. El promedio de los valores de la ROI es sustraído a los valores de los píxeles de la ROI en cuestión. Esto se hace para minimizar los efectos de las componentes de frecuencias más próximas a cero en la Transformada de Fourier y reducir la influencia de no. uniformidades a muy bajas frecuencias en la imagen. Estas no. uniformidades son debidas a la dispersión de Compton [43], la afectación por corrientes oscuras, la ganancia no uniforme del detector o el endurecimiento del haz de rayos X [44]. Posteriormente se calculó la Transformada de Fourier de cada fila de la ROI para luego ser promediados. La Transformada de Fourier se calculó utilizando la función pcov del Image Processing Toolbox de Matlab que implementa el algoritmo de la covarianza [45] para estimar paramétricamente la densidad espectral de potencias (Anexo 4). La NPS es el resultado de elevar al cuadrado el valor absoluto de la Transformada de Fourier que se calculó con anterioridad y multiplicarlo por un factor de normalización que se propone en el método escogido.. (| FD(. − E⌊. ⌋)| ). (12).
(46) CAPÍTULO 2. MATERIALES Y MÉTODO. 34. donde: . : valor de píxel en la posición (n,m). . 𝐸⌊. . 𝑝 y 𝑝 : tamaño de pixel. . ⌋:el valor medio de píxel en la ROI. y. : tamaño de la matriz en las direcciones x e y. 2.6 Medidas objetivas tradicionales de calidad de imágenes para comparación análisis de los resultados Las medidas objetivas tradicionales de calidad de imagen utilizadas para comparación y análisis de los resultados de la MTF y NPS fueron la Relación Contraste-Ruido (CNR), el contraste imagen y la Relación señal a ruido (SNR). Se calcularon en Matlab sobre las mismas imágenes a las que se les calculó la MTF Y el NPS. La CNR expresa la habilidad de un sistema de adquisición de imágenes para detectar gran cantidad de detalles y se expresa matemáticamente como [26]: (13) donde i1 y i2 son la media de los valores de intensidad la región de interés objeto y la de fondo, σi es la desviación típica de la región de fondo, que según la estadística de Poisson es equivalente al ruido en esta región. El Contraste imagen se define como la diferencia relativa en la escala de grises de la imagen entre regiones con detalles adyacentes y se expresa matemáticamente como: (14) donde i1 y i2 son la media de los valores de intensidad la región de interés objeto y la de fondo [26]. La SNR es el cociente obtenido entre la media de la señal (como quiera que se haya obtenido) y el ruido en la imagen y se define matemáticamente como..
(47) CAPÍTULO 2. MATERIALES Y MÉTODO. SNR . , . 35 (15). donde μ: media de los valores de la señal. σ: desviación estándar de los valores de la señal. Atendiendo a la distribución de Poisson que caracteriza las imágenes de TC, si μ es X y X entonces. √ X .[26]. ..
(48) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. CAPÍTULO 3.. 36. RESULTADO Y DISCUSIÓN. En este capítulo se hace un análisis de los resultados arrojados por los experimentos realizados para el cálculo de los predictores robustos de calidad de imagen en ambos equipos: i-Cat Clásico y Prexion 3D. 3.1. Resultado de la MTF. En la Figura 19 se muestran los resultados de la MTF para ambos equipos donde la frecuencia espacial está expresada en pares de línea por centímetro (pl cm -1) y donde físicamente cada par de líneas consiste en una barra y un inter espaciado de igual ancho. El valor de la MTF se normalizó entre 0 y 1.. Figura 19: Gráfico de MTF contra frecuencia espacial.
(49) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 37. Muchos sistemas de imagen de TC son juzgados por su frecuencia espacial umbral, normalmente alrededor del 10%, a veces llamada límite de detección. Se considera que para valores menores a este el sistema no es capaz de tener una resolución espacial adecuada para diagnóstico porque no permite apreciar lesiones o estructuras menores que ese tamaño [29]. En el i-Cat Clásico se obtiene que este valor es de 15,7 pl cm-1 (Figura 20), mientras que para el Prexion 3D es de 16,6 pl cm-1 (Figura 21). Por lo que el Prexion 3D tiene mayor límite de detección que el i-Cat Clásico y podrá permitir apreciar objetos más pequeños [35].. Figura 20: Curva de MTF para i-Cat Clásico.
(50) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 38. Figura 21: Curva de la MTF para Prexion 3D El límite de detección es determinante para estimar el tamaño absoluto del menor objeto que puede ser identificado en las imágenes obtenidas por los equipos. Teóricamente, el tamaño absoluto del objeto que puede ser identificado por un sistema de imagen de TC es igual a la mitad del recíproco de la frecuencia espacial del límite de detección [29]. Así por ejemplo, siguiendo el valor del mismo, el i-Cat Clásico puede identificar un objeto de alto contraste de 0,32 mm. Por su parte el Prexion 3D permitirá identificar un objeto de alto contraste de 0,30 mm. En la Figura 20 también podemos apreciar que en el equipo i-Cat Clásico la curva de la MTF tuvo su valor máximo posible para una frecuencia de 10,6 pl cm-1 por lo que para esa frecuencia espacial el equipo será más resolutivo. A partir de ella presentó una rápida atenuación, a medida que aumentó la frecuencia espacial. Por encima de los 17 pl cm-1 el equipo no es capaz de reproducir los detalles de las imágenes, esta es su frecuencia umbral..
Figure


+7



Documento similar
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
En junio de 1980, el Departamento de Literatura Española de la Universi- dad de Sevilla, tras consultar con diversos estudiosos del poeta, decidió propo- ner al Claustro de la
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
Después de una descripción muy rápida de la optimización así como los problemas en los sistemas de fabricación, se presenta la integración de dos herramientas existentes
[r]
SVP, EXECUTIVE CREATIVE DIRECTOR JACK MORTON
Social Media, Email Marketing, Workflows, Smart CTA’s, Video Marketing. Blog, Social Media, SEO, SEM, Mobile Marketing,
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
