ESCUELA SUPERIOR DE INGENIER€A MEC•NICA Y EL‚CTRICA
SECCI•N DE ESTUDIOS DE POSGRADO E INVESTIGACI•N
DEPARTAMENTO DE INGENIER€A EL‚CTRICA
AN‚LISIS DE ESTABILIDAD DE VOLTAJE UTILIZANDO
LAS PROYECCIONES M€TRICAS DEL JACOBIANO DEL
ESTIMADOR DE ESTADO
T E S I S
QUE PARA OBTENER EL GRADO DE:
MAESTRO EN CIENCIAS CON ESPECIALIDAD
EN INGENIERƒA EL€CTRICA
PRESENTA:
CON CARI€O PARA:
Mis padres
MAR•A GUADALUPE ZEPEDA
Y
CARLOS MANUEL L‚PEZ
Mi hermana
AGRADECIMIENTOS
Al Dr. Jaime Robles Garc€a por brindarme sus conocimientos, sus
consejos y principalmente su amistad.
A CONACYT y al IPN por el apoyo econ•mico otorgado.
Resumen
En esta tesis se desarrollan las proyecciones m„tricas por nodos para el an…lisis de la estabilidad de voltaje ante el aumento de la potencia reactiva inductiva en dos sistemas de prueba, 14 y 30 nodos. Las m„tricas en general han sido utilizadas en los sistemas el„ctricos de potencia para la determinaci•n de puntos cr€ticos utilizando flujos de potencia, mientras que con el estimador de estado se han utilizado para identificar puntos de apalancamiento y para la deducci•n de pesos m…s robustos en los estimadores GM.
Para obtener las proyecciones m„tricas se parte de la matriz jacobiana con nodo compensador del estimador de estado, utilizando principalmente los elementos del jacobiano formados por las mediciones de flujos e inyecciones de potencia.
De las proyecciones m„tricas resultantes se obtiene el nivel de riesgo de las mismas, dicho proceso se realiza como indicador de la estabilidad de voltaje de un sistema el„ctrico en un momento dado.
Abstract
In this thesis metric projections by nodes are developed through the increment of reactive power in two test systems, 14 and 30 nodes. In general, metrics have been used in electric power systems to identify critical points in power flow studies, to detect leverage points by the state estimator and to deduce more robust weights in GM estimators.
In order to obtain metric projections we started with the state estimator’s Jacobian matrix considering the slack node, the algorithm developed to metric projections use power flow and power injection measurements that constitute the Jacobian matrix.
From the resulting metric projections the level of risk of the same ones is obtained, this process is in a while made like indicator of the stability of voltage of an electrical system.
Contenido
RESUMEN... I
ABSTRACT... II
•NDICE DE FIGURAS... IX
•NDICE DE TABLAS...XIV
GLOSARIO DE TƒRMINOS... XVII
ABREVIATURAS... XVIII
CAP•TULO 1
INTRODUCCI‚N...1
1.1 Introducci•n...1
1.2 Objetivo ...5
1.3 Justificaci•n...5
1.4 Antecedentes ...7
1.5 Aportaciones... 10
1.6 Estructura ...11
CAP•TULO 2 ESPACIOS MƒTRICOS... 13
2.1 Introducci•n ... 13
2.2 Espacios M„tricos... 15
2.3 Espacio m„trico discreto... 16
2.4 La recta real... 16
2.5 Distancia Euclidiana ... 17
2.6 El espacio
p
n d , ... 19CAP•TULO 3
ESTIMACI‚N DE ESTADO POR M•NIMOS CUADRADOS... 24
3.1 Introducci•n ... 24
3.2 Estimaci•n de Estado por M€nimos Cuadrados ... 27
3.3 Estructura y formaci•n de la matriz Jacobiana y del vector z... 32
3.4 Factores de Ponderaci•n ... 36
3.5 Observabilidad... 37
3.5.1 Concepto de Observabilidad... 37
3.6 Prueba (ji-cuadrada)... 39
CAP•TULO 4 PROYECCIONES MƒTRICAS CON ESTIMACI‚N DE ESTADO... 43
4.1 Introducci•n ... 43
4.2 Proyecciones M„tricas por Nodos... 44
4.3 Determinaci•n del Valor de Corte... 47
4.4 Proyecciones M„tricas considerando el Jacobiano del Estimador de Estado... 48
4.5 Algoritmo... 48
4.6 Ejemplo de las proyecciones m„tricas aplicadas al Jacobiano del estimador de estado ... ..53
4.7 Riesgo ... 59
4.7.1 Ejemplo del Riesgo considerando las proyeccines m„tricas m€nimas ... 62
4.8 Descomposici•n del Valor Singular (DVS) ... 63
4.8.1 Definici•n ... 64
4.8.2 Ejemplo de la DVS alpicada a las proyecciones m„tricas ... 66
CAP•TULO 5 RESULTADOS... 70
5.1 Introducci•n... 70
5.2 Sistema de Prueba de 14 Nodos... 73
5.2.1 Resultados de Voltaje Sistema 14 Nodos ... 73
5.2.1.1 Resultados de Voltaje CASO 14-9... 74
5.2.1.2 Resultados de Voltaje CASO 14-14 ... 75
5.2.2 Proyecciones M„tricas M€nimas Caso 14-9... 78 5.2.2.1 Proyecciones M„tricas M€nimas correspondientes
a las mediciones de Flujos de Potencia de los
elementos P
del Jacobiano CASO 14-9... 795.2.2.2 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Flujos de Potencia de los
elementos QV del Jacobiano CASO 14-9... 80 5.2.2.3 Proyecciones M„tricas M€nimas correspondientes
a las mediciones de Inyecciones de Potencia de los
elementos P
del Jacobiano CASO 14-9... 815.2.2.4 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Inyecciones de Potencia de los
elementos QV del Jacobiano CASO 14-9... 82 5.2.2.5 An…lisis de los resultados de las
proyecciones m„tricas m€nimas CASO 14-9... 85 5.2.3 Proyecciones M„tricas M€nimas Caso 14-14 ... 87
5.2.3.1 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Flujos de Potencia de los
elementos P
del Jacobiano CASO 14-14 ... 885.2.3.2 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Flujos de Potencia de los
elementos QV del Jacobiano CASO 14-14... 89 5.2.3.3 Proyecciones M„tricas M€nimas correspondientes
a las mediciones de Inyecciones de Potencia de los
elementos P
del Jacobiano CASO 14-14... 905.2.3.4 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Inyecciones de Potencia de los
elementos QV del Jacobiano CASO 14-14... 91 5.2.3.5 An…lisis de los resultados de las
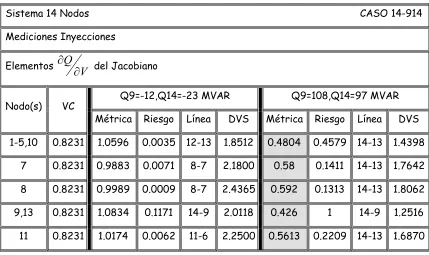
5.2.4 Proyecciones M„tricas M€nimas Caso 14-914 ... 96
5.2.4.1 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Flujos de Potencia de los elementos P
del Jacobiano CASO 14-914... 975.2.4.2 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Flujos de Potencia de los elementos QV del Jacobiano CASO 14-914 ... 98
5.2.4.3 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Inyecciones de Potencia de los elementos P
del Jacobiano CASO 14-914 ... 995.2.4.4 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Inyecciones de Potencia de los elementos QV del Jacobiano CASO 14-914 ...100
5.2.4.5 An…lisis de los resultados de las proyecciones m„tricas m€nimas CASO 14-914...103
5.3 Sistema de Prueba de 30 Nodos ...105
5.3.1 Resultados de Voltaje Sistema 30 Nodos...105
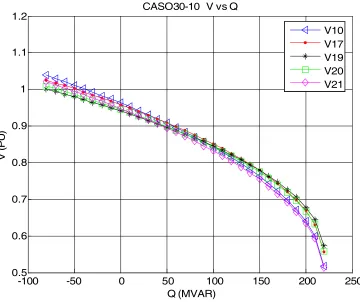
5.3.1.1 Resultados de Voltaje CASO 30-10 ...106
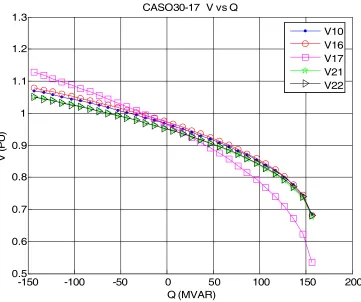
5.3.1.2 Resultados de Voltaje CASO 30-17...107
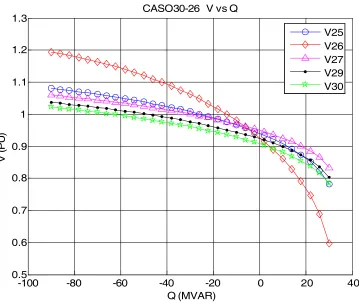
5.3.1.3 Resultados de Voltaje CASO 30-26...108
5.3.1.4 An…lisis del comportamiento del voltaje para el Sistema de 30 nodos ...109
5.3.2 Proyecciones M„tricas M€nimas Caso 30-10... 110
5.3.2.1 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Flujos de Potencia de los elementos P
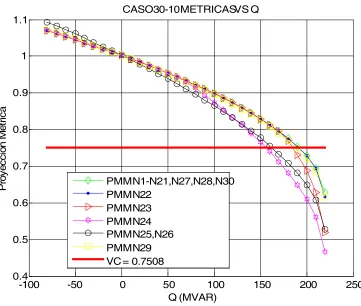
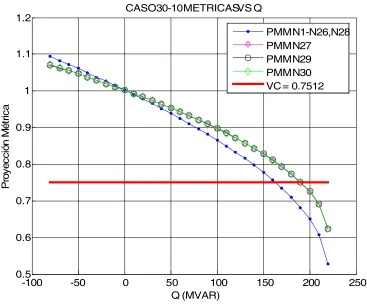
del Jacobiano CASO 30-10...1115.3.2.2 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Flujos de Potencia de los elementos QV del Jacobiano CASO 30-10 ... 112
5.3.2.4 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Inyecciones de Potencia de los
elementos QV del Jacobiano CASO 30-10 ... 114 5.3.2.5 An…lisis de los resultados de las
proyecciones m„tricas m€nimas CASO 30-10 ... 117 5.3.3 Proyecciones M„tricas M€nimas Caso 30-17 ... 119
5.3.3.1 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Flujos de Potencia de los
elementos P
del Jacobiano CASO 30-17...1205.3.3.2 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Flujos de Potencia de los
elementos QV del Jacobiano CASO 30-17 ... 121 5.3.3.3 Proyecciones M„tricas M€nimas correspondientes
a las mediciones de Inyecciones de Potencia de los
elementos P
del Jacobiano CASO 30-17 ...122 5.3.3.4 Proyecciones M„tricas M€nimas correspondientesa las mediciones de Inyecciones de Potencia de los
elementos QV del Jacobiano CASO 30-17 ...123 5.3.3.5 An…lisis de los resultados de las
proyecciones m„tricas m€nimas CASO 30-17 ...126 5.3.4 Proyecciones M„tricas M€nimas Caso 30-26...128
5.3.4.1 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Flujos de Potencia de los
elementos P
del Jacobiano CASO 30-26...1295.3.4.2 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Flujos de Potencia de los
elementos QV del Jacobiano CASO 30-26...130 5.3.4.3 Proyecciones M„tricas M€nimas correspondientes
a las mediciones de Inyecciones de Potencia de los
5.3.4.4 Proyecciones M„tricas M€nimas correspondientes a las mediciones de Inyecciones de Potencia de los
elementos QV del Jacobiano CASO 30-26...132
5.3.4.5 An…lisis de los resultados de las proyecciones m„tricas m€nimas CASO 30-26 ...135
CAP•TULO 6 CONCLUSIONES Y RECOMENDACIONES PARA TRABAJOS FUTUROS...137
6.1 Conclusiones...137
6.2 Recomendaciones para trabajos futuros...139
REFERENCIAS...140
APƒNDICE A SISTEMAS DE PRUEBA...146
A.1 Sistema El„ctrico de 14 Nodos IEEE...146
A.2 Sistema El„ctrico de 30 Nodos IEEE ...150
APƒNDICE B PROGRAMA DESARROLLADO...156
B.1 Archivo de Datos ...156
Indice de Figuras
Figura 1.1 Diagrama Esquem…tico de un centro de control “t€pico”….………….4 Figura 3.1 Diagrama de flujos del estimador de estado
por m€nimos cuadrados ponderados…..………31 Figura 4.1 Determinaci•n de los valores de corte..………..51 Figura 4.2 Proyecciones M„tricas utilizando el Estimador de Estado……….52 Figura 5.1 Variaci•n del Voltaje ante el incremento de la potencia reactiva
inductiva en el nodo 9, caso 14-9……….74 Figura 5.2 Variaci•n del Voltaje ante el incremento de la potencia reactiva
inductiva en el nodo 14, caso 14-14………..75 Figura 5.3 Variaci•n del Voltaje ante el incremento de la potencia reactiva
inductiva en el nodo 9 y 14, caso 9-14………76 Figura 5.4 Comportamiento de las proyecciones m„tricas m€nimas
por nodos correspondientes a las mediciones de flujos de potencia de los elementos P
del jacobiano anteel incremento de la potencia reactiva inductiva, caso 14-9………79 Figura 5.5 Comportamiento de las proyecciones m„tricas m€nimas
por nodos correspondientes a las mediciones de flujos de potencia de los elementos QV del jacobiano ante
el incremento de la potencia reactiva inductiva, caso 14-9………80 Figura 5.6 Comportamiento de las proyecciones m„tricas m€nimas
por nodos correspondientes a las mediciones de inyecciones de potencia de los elementos P
del jacobiano ante elFigura 5.7 Comportamiento de las proyecciones m„tricas m€nimas por nodos correspondientes a las mediciones de inyecciones de potencia de los elementos QV del jacobiano ante el incremento de la potencia reactiva, caso 14-9………82 Figura 5.8 Comportamiento de las proyecciones m„tricas m€nimas
por nodos correspondientes a las mediciones de flujos de potencia de los elementos P
del jacobiano anteel incremento de la potencia reactiva inductiva, caso 14-14……88 Figura 5.9 Comportamiento de las proyecciones m„tricas m€nimas
por nodos correspondientes a las mediciones de flujos de potencia de los elementos QV del jacobiano ante
el incremento de la potencia reactiva inductiva, caso 14-14……89 Figura 5.10 Comportamiento de las proyecciones m„tricas m€nimas
por nodos correspondientes a las mediciones de inyecciones de potencia de los elementos P
del jacobiano ante elincremento de la potencia reactiva, caso 14-14……….90 Figura 5.11 Comportamiento de las proyecciones m„tricas m€nimas
por nodos correspondientes a las mediciones de inyecciones de potencia de los elementos QV del jacobiano ante el incremento de la potencia reactiva, caso 14-14……….81 Figura 5.12 Comportamiento de las proyecciones m„tricas m€nimas por
nodos correspondientes a las mediciones de flujos de potencia de los elementos P
del jacobiano ante elincremento de la potencia reactiva inductiva, caso 14-914………97 Figura 5.13 Comportamiento de las proyecciones m„tricas m€nimas por
Figura 5.14 Comportamiento de las proyecciones m„tricas m€nimas por nodos correspondientes a las mediciones de inyecciones de potencia de los elementos P
del jacobiano ante elincremento de la potencia reactiva, caso 14-914……….99 Figura 5.15 Comportamiento de las proyecciones m„tricas m€nimas
por nodos correspondientes a las mediciones de inyecciones de potencia de los elementos QV del jacobiano ante el incremento de la potencia reactiva, caso 14-914………100 Figura 5.16 Variaci•n del Voltaje ante el incremento de la potencia reactiva
inductiva en el nodo 10, caso 30-10………106 Figura 5.17 Variaci•n del Voltaje ante el incremento de la potencia reactiva
inductiva en el nodo 17, caso 30-17………107 Figura 5.18 Variaci•n del Voltaje ante el incremento de la potencia reactiva
inductiva en el nodo 26, caso 30-26……….108 Figura 5.19 Comportamiento de las proyecciones m„tricas m€nimas por
nodos correspondientes a las mediciones de flujos de potencia de los elementos P
del jacobiano ante elincremento de la potencia reactiva inductiva, caso 30-10………111 Figura 5.20 Comportamiento de las proyecciones m„tricas m€nimas por
nodos correspondientes a las mediciones de flujos de potencia de los elementos QV del jacobiano ante el
incremento de la potencia reactiva inductiva, caso 30-10………112 Figura 5.21 Comportamiento de las proyecciones m„tricas m€nimas
por nodos correspondientes a las mediciones de inyecciones de potencia de los elementos P
del jacobiano ante elFigura 5.22 Comportamiento de las proyecciones m„tricas m€nimas por nodos correspondientes a las mediciones de inyecciones de potencia de los elementos QV del jacobiano ante el incremento de la potencia reactiva, caso 30-10………114 Figura 5.23 Comportamiento de las proyecciones m„tricas m€nimas por
nodos correspondientes a las mediciones de flujos de potencia de los elementos P
del jacobiano ante elincremento de la potencia reactiva inductiva, caso 30-17………120 Figura 5.24 Comportamiento de las proyecciones m„tricas m€nimas por
nodos correspondientes a las mediciones de flujos de potencia de los elementos QV del jacobiano ante el
incremento de la potencia reactiva inductiva, caso 30-17……….121 Figura 5.25 Comportamiento de las proyecciones m„tricas m€nimas
por nodos correspondientes a las mediciones de inyecciones de potencia de los elementos P
del jacobiano ante elincremento de la potencia reactiva, caso 30-17………..122 Figura 5.26 Comportamiento de las proyecciones m„tricas m€nimas
por nodos correspondientes a las mediciones de inyecciones de potencia de los elementos QV del jacobiano ante el incremento de la potencia reactiva, caso 30-17………..123 Figura 5.27 Comportamiento de las proyecciones m„tricas m€nimas por
nodos correspondientes a las mediciones de flujos de potencia de los elementos P
del jacobiano ante elincremento de la potencia reactiva inductiva, caso 30-26………129 Figura 5.28 Comportamiento de las proyecciones m„tricas m€nimas por
Figura 5.29 Comportamiento de las proyecciones m„tricas m€nimas por nodos correspondientes a las mediciones de inyecciones de potencia de los elementos P
del jacobiano ante elincremento de la potencia reactiva, caso 30-26..………..131 Figura 5.30 Comportamiento de las proyecciones m„tricas m€nimas
Indice de Tablas
Tabla 3.1. Ecuaciones de los elementos de la matriz jacobiana………33 Tabla 5.1 Proyecciones M„tricas M€nimas de las mediciones de flujos
correspondientes a los elementos P
, CASO 14-9………83Tabla 5.2 Proyecciones M„tricas M€nimas de las mediciones de flujos
correspondientes a los elementos QV, CASO 14-9..………83 Tabla 5.3 Proyecciones M„tricas M€nimas de las mediciones de
inyecciones de los elementos P
, CASO 14-9.……….84Tabla 5.4 Proyecciones M„tricas M€nimas de las mediciones de
inyecciones de los elementos QV , CASO 14-9.………84 Tabla 5.5 Proyecciones M„tricas M€nimas de las mediciones de flujos
correspondientes a los elementos P
, CASO 14-14.………92Tabla 5.6 Proyecciones M„tricas M€nimas de las mediciones de flujos
correspondientes a los elementos QV, CASO 14-14………92 Tabla 5.7 Proyecciones M„tricas M€nimas de las mediciones de
inyecciones de los elementos P
, CASO 14-14……….93Tabla 5.8 Proyecciones M„tricas M€nimas de las mediciones de
inyecciones de los elementos QV , CASO 14-14..………93 Tabla 5.9 Proyecciones M„tricas M€nimas de las mediciones de flujos
Tabla 5.10 Proyecciones M„tricas M€nimas de las mediciones de flujos
correspondientes a los elementos QV , CASO 14-914.…………..101 Tabla 5.11 Proyecciones M„tricas M€nimas de las mediciones de
inyecciones de los elementos P
, CASO 14-914.………..102Tabla 5.12 Proyecciones M„tricas M€nimas de las mediciones de
inyecciones de los elementos QV , CASO 14-914..……….102 Tabla 5.13 Proyecciones M„tricas M€nimas de las mediciones de flujos
correspondientes a los elementos P
, CASO 30-10………115Tabla 5.14 Proyecciones M„tricas M€nimas de las mediciones de flujos
correspondientes a los elementos QV , CASO 30-10.………115 Tabla 5.15 Proyecciones M„tricas M€nimas de las mediciones de
inyecciones de los elementos P
, CASO 30-10……….116Tabla 5.16 Proyecciones M„tricas M€nimas de las mediciones de
inyecciones de los elementos QV , CASO 30-10..………116 Tabla 5.17 Proyecciones M„tricas M€nimas de las mediciones de flujos
correspondientes a los elementos P
, CASO 30-17………124Tabla 5.18 Proyecciones M„tricas M€nimas de las mediciones de flujos
correspondientes a los elementos QV , CASO 30-17.………124 Tabla 5.19 Proyecciones M„tricas M€nimas de las mediciones de
inyecciones de los elementos P
, CASO 30-17..……….125Tabla 5.20 Proyecciones M„tricas M€nimas de las mediciones de
Tabla 5.21 Proyecciones M„tricas M€nimas de las mediciones de flujos
correspondientes a los elementos P
, CASO 30-26..………133Tabla 5.22 Proyecciones M„tricas M€nimas de las mediciones de flujos
correspondientes a los elementos QV , CASO 30-26………133 Tabla 5.23 Proyecciones M„tricas M€nimas de las mediciones de
inyecciones de los elementos P
, CASO 30-26.………134Tabla 5.24 Proyecciones M„tricas M€nimas de las mediciones de
Glosario de T„rminos
,
d x y
Distancia o m„trica del puntox
al puntoy
H
Matriz Jacobiana del estimador de estadoG
Matriz de GananciaW
Matriz de Ponderacionesz
Vector de mediciones del estimador de estado sen Funci•n senocos Funci•n coseno
bus
Y
Matriz de admitanciasij
G
Parte real de la matriz de admitancias del nodoi
alj
ij
B
Parte imaginaria de la matriz de admitancias del nodoi
alj
'
ij
B
Admitancia en paralelo del nodoi
alj
ij
Fasor entre los nodosi
yj
ij
P
Flujo de potencia activa del nodoi
al nodoj
ij
Q
Flujo de potencia reactiva del nodoi
al nodoj
i
P
Inyecci•n de potencia activa en el nodoi
i
Q
Inyecci•n de potencia reactiva en el nodoi
V
VoltajeQ
Potencia ReactivaAbreviaturas
CCE Centro de Control de Energ€a SEP Sistema El„ctrico de Potencia
SCADA Sistema de Supervisi•n, Control y Adquisici•n de Datos (SCADA, por sus siglas en ingl„s)
GM Estimador-M Generalizado, la M es por m…xima probabilidad WLS M€nimos Cuadrados Ponderados (WLS, por sus siglas en ingl„s) ESIME Escuela Superior de Ingenier€a Mec…nica y El„ctrica
SEPI Secci•n de Estudios de Posgrado e Investigaci•n DVS Descomposici•n del Valor Singular
PMM Proyecci•n M„trica M€nima VC Valor de Corte
CAP•TULO 1
Introducci…n
1.1 Introducci…n
Con el incremento de la complejidad de los sistemas de potencia, la integraci•n de la informaci•n adecuada para asegurar el buen desempe‚o de varios controles se ha vuelto m…s importante que nunca.
realizar un estimado para las respectivas variables de estado del sistema (magnitudes de voltaje y …ngulos de todos los nodos del sistema) [3].
La precisi•n de la estimaci•n de estado no s•lo depende de los m„todos usados, sino que tambi„n depende de lo redundante de la medici•n, localizaciones, arreglos y tipos de mediciones.
La estimaci•n de estado se desarrolla gracias el conjunto de mediciones, las cuales consisten de inyecciones de potencia real y reactiva, flujos de potencia reales y reactivos y mediciones de voltajes nodales. Estas mediciones son reunidas por los Sistemas de Supervisi•n, Control y Adquisici•n de Datos (SCADA, por sus siglas en ingl„s) y son transmitidas al CCE a trav„s de las l€neas de transmisi•n.
En los CCE de los SEP, el estimador de estado juega un papel determinante en la observaci•n de las variables de estado del sistema el„ctrico. Los datos obtenidos del estimador de estado son utilizados para realizar otros estudios como: Flujos de Potencia, An…lisis de Seguridad, Despacho y Seguridad Din…mica. Para lo anterior es necesario contar de un estimador altamente confiable, sobre todo cuando se presentan errores de medici•n, errores topol•gicos y puntos de apalancamiento.
Figura 1.1 Diagrama Esquem…tico de un centro de control “t€pico” [4].
Optimizaci€n de diferentes escenarios
Programaci€n de Mantenimiento Despacho econ€mico de carga Monitoreo de Seguridad y Control Control de Voltaje-Potencia Reactiva
Interfase Hombre-M•quina
Base De Datos Estimador de Estado
- Protecci€n - Adquisici€n
de datos - Control Local
y switcheo
- Protecci€n - Adquisici€n
de datos - Control Local
y switcheo
Sistema El‚ctrico de Potencia …
Pron€stico de carga a corto y
largo plazo
Estadƒsticas de Reportes de Operaci€n
1.2 Objetivo
Desarrollar las proyecciones m„tricas por nodos para el an…lisis de estabilidad de voltaje en sistemas el„ctricos de potencia partiendo de la matriz jacobiana del estimador de estado ante el aumento de la potencia reactiva inductiva.
Aplicar concepto de riesgo a las proyecciones m„tricas como indicador de la estabilidad de voltaje de un sistema el„ctrico en un momento espec€fico.
Validar matem…ticamente a las proyecciones m„tricas por nodos a trav„s de la descomposici•n del valor singular.
1.3 Justificaci…n
La aplicaci•n de las proyecciones m„tricas nos permiten identificar los nodos y las l€neas del sistema donde se presentan los problemas de estabilidad de voltaje ante el incremento de la potencia reactiva inductiva en diferentes escenarios dados.
El an…lisis de las m„tricas en forma matricial ha sido utilizado para el c…lculo de las distancias entre varias ciudades, localizando las distancias en forma matricial y tambi„n se ha realizado la comparaci•n entre matrices. En donde la medici•n de las m„tricas se realiza bas…ndose en la norma euclidiana.
Tambi„n se ha utilizado para la identificaci•n de puntos de apalancamiento en los estimadores de estado de los sistemas el„ctricos de potencia, as€ mismo para deducir pesos que hagan m…s robustos los estimadores GM y para la identificaci•n de puntos cr€ticos utilizando flujos de potencia.
1.4 Antecedentes
La implementaci•n del estimador de estado por el m„todo de m€nimos cuadrados ponderados (Weighted Least-Squares, WLS por sus siglas en ingl„s) en sistemas el„ctricos de potencia fue desarrollada por Schweppe [5] a finales de los 1960s y a principios de los 1970s, bas…ndose en t„cnicas de matem…ticas cl…sicas como estimaci•n, detecci•n, probabilidad, estad€stica, y filtrado. El estimador de estado resulta de una combinaci•n de dos grandes campos, flujos de carga, y la teor€a de estimaci•n estad€stica
El concepto de estimaci•n de estado se desarroll• r…pidamente desde su inicio [6] hasta su implementaci•n en tiempo real; la primera es aparentemente la instalaci•n del sistema Tokke en Noruega [7].
Debido a que el estimador de estado en el CCE se ejecuta en tiempo real, y debido tambi„n al gran tama‚o de las redes el„ctricas actuales, es necesario reducir el tiempo de c…lculo, para solucionar este problema se desarroll• el m„todo del estimador desacoplado r…pido [8] [9] [10], el cual reduce el n†mero de iteraciones para resolver el sistema, y por lo tanto el tiempo de c•mputo.
de control, contribuyendo con una completa, consistente y confiable base de datos para el subsecuente an…lisis de la red, as€ como la evaluaci•n de contingencias, flujos de potencia •ptimos y estudios de flujos de carga on-line.
Por otra parte, en 1906 Maurice Fr„chet (1878-1973) en su tesis
“Sur
Quelques Points du Calcul Functionnel”
, introduce una noci•n de distancia en conjuntos abstractos de puntos. Sin embargo el t„rmino de “Espacios M„tricos” se lo debemos a F„lix Hausdorff. De hecho, su trabajo cl…sico“Grundz‚ge der Mengenlehre”
en 1914, es la fuente de mucha de la terminolog€a con respecto a conjuntos abstractos y espacios abstractos.En lo que se refiere a la aplicaci•n de las m„tricas dentro de los sistemas el„ctricos, han sido utilizadas para deducir pesos que hagan m…s robustos los estimadores GM [11]; mientras que en la Secci•n de Estudios de Posgrado e Investigaci•n (SEPI) de la ESIME las proyecciones m„tricas se han utilizado en flujos de potencia y en el estimador de estado para identificar puntos cr€ticos [12] y puntos de apalancamiento m†ltiples o en forma aislada [13] respectivamente.
voltaje tambi„n se puede considerar como la habilidad de un sistema en mantener el voltaje cuando la admitancia en las redes el„ctricas y la potencia de la carga son modificadas, as€ como tambi„n cuando la potencia y el voltaje son controlables [16].
La inestabilidad de voltaje se manifiesta como una ca€da progresiva e incontrolable del voltaje en algunos nodos del SEP. La consecuencia m…s dr…stica de la inestabilidad de voltaje se le conoce como colapso de voltaje.
El colapso de voltaje es definido como el proceso secuencial de eventos que acompa‚a a la inestabilidad de voltaje provocando apagones o un perfil de voltaje inaceptablemente bajo en una parte significante del SEP [15].
1.5 Aportaciones
1. Desarrollo e implementaci•n de la metodolog€a de las proyecciones m„tricas por nodos aplicadas al jacobiano del estimador de estado para el an…lisis de estabilidad de voltaje.
2. Aplicaci•n del concepto de riesgo a las proyecciones m„tricas, con el objetivo de conocer el nivel de riesgo del sistema ante una condici•n de operaci•n dada.
3. La formaci•n de matrices con las proyecciones m„tricas por nodos, a las cuales se le aplican la descomposici•n del valor singular, esto con la finalidad de validar matem…ticamente a las proyecciones m„tricas como indicadores de la estabilidad de voltaje.
1.6 Estructura
La organizaci•n de la presente tesis est… desarrollada de la manera siguiente: En el cap€tulo 1 se hace una breve introducci•n al desarrollo de la estimaci•n de estado dentro de los sistemas el„ctrico, as€ como el nacimiento del concepto de los espacios m„tricos. Se menciona el objetivo, la justificaci•n y las aportaciones de este trabajo de tesis.
La definici•n y las caracter€sticas de los espacios m„tricos se mencionan en el cap€tulo 2, as€ como la descripci•n de dos tipos de m„tricas.
Mientras que en el cap€tulo 3 se plantea el modelo de la estimaci•n de estado por el m„todo de los m€nimos cuadrados ponderados, incluyendo sus elementos m…s relevantes, as€ como la estructura y formaci•n de la matriz jacobiana.
El cap€tulo 4 presenta la metodolog€a para poder desarrollar las proyecciones m„tricas por nodos, as€ como la aplicaci•n del concepto de riesgo y de la descomposici•n del valor singular de las m„tricas.
El cap€tulo 6 se dan las conclusiones y las recomendaciones para trabajos futuros, posteriormente se muestran las referencias utilizadas en el presente trabajo.
El ap„ndice A muestra los diagramas unifilares y los par…metros el„ctricos de los dos sistemas de prueba, indicando tanto los datos necesarios para correr flujos de carga y el estimador de estado, as€ como los valores estimados por el programa desarrollado del estimador de estado.
CAP•TULO 2
Espacios M„tricos
2.1 Introducci…n
En matem…ticas frecuentemente podemos agrupar ciertos objetos en espacios abstractos y definir entre ellos relaciones semejantes a las existentes entre los puntos del espacio ordinario. El paralelismo que se establece as€ entre los espacios abstractos y el espacio euclidiano nos permite visualizar y lograr un entendimiento m…s profundo de estos objetos.
En algunas aplicaciones el planteo m…s simple que puede usarse es el de espacio m„trico. Un espacio m„trico es un conjunto de puntos en los que est… definido la noci•n de distancia entre puntos. Podemos usar la funci•n distancia o
m€trica
para definir los conceptos fundamentales del an…lisis, tales como convergencia, continuidad y compacidad.a su vez espacios vectoriales, con una m„trica derivada de una norma que mide la
longitud
de un vector.Tales espacios ser€an llamados espacios normados. La intuici•n geom„trica derivada de los espacios euclidianos de dimensiones finitas es esencial, aunque caracter€sticas completamente nuevas surgen en los espacios de infinitas dimensiones.
2.2 Espacios M„tricos
Un espacio m„trico [20] [21] [22] [23] es un par
( , )
X d
dondeX
es un conjunto no vac€o yd
es una funci•n real definida enX x X
, llamada distancia o m„trica, y que satisface los siguientes axiomas:i. Positividad:
d x y
( , )
0
si
x
y
x y
,
X
ii. Identidad de Imperceptibilidad:
d x y
( , )
0
x
y
x y
,
X
iii. Simetr€a:
d x y
( , )
d y x
( , )
x y
,
X
iv. Desigualdad Triangular:
d x z
( , )
d x y
( , )
d y z
( , )
x y z
, ,
X
Es decir,
a) Las distancias son no negativas y el †nico punto a distancia cero de
x
es el mismox
;b) la distancia es una funci•n sim„trica;
c) la distancia satisface la desigualdad triangular: la longitud de un lado de un tri…ngulo es menor que la suma de las longitudes de los otros dos lados.
2.3 Espacio m„trico discreto
Dado un conjunto no vac€o cualquiera
X
definimos la m„trica discretad
enX
mediante
,
1
0
x
y
d x y
x
y
Se comprueba f…cilmente que
X d
,
es un espacio m„trico.2.4 La recta real
Sea
X
,d x y
,
x
y
para cadax y
,
. Los axiomas m„tricos se cumplen. El conjunto de n†meros complejos
con la funci•n distancia
,
2.5 Distancia Euclidiana
Existen muchas maneras diferentes para definir la distancia entre dos puntos. La distancia entre dos puntos es la longitud del camino que los conecta. En el plano, la distancia entre los puntos
( ,
x y
1 1)
y( ,
x y
2 2)
est… dada por el teorema de Pit…goras.Sea n
X
, el conjunto de todas lasn
de n†meros reales. Si1 2
( ,
,
,
n)
x
x x
x
e1 2
( ,
,
,
n)
y
y y
y
son elementos deX
, definimos la distancia:2 1
( , )
(
)
n
i i
i
d x y
x
y
(2.1)La f•rmula anterior es conocida como Distancia Euclidiana [24] [25] [26] [27], que es la distancia m…s corta entre dos puntos; tambi„n conocida como la distancia “standard” entre dos vectores.
Puede verificarse f…cilmente que se cumplen con los tres primeros axiomas m„tricos. La desigualdad triangular se escribe como
2 2 2
1 1 1
( , )
n n n
i i i i i i
i i i
d x z
x
z
x
y
x
y
Si en la desigualdad anterior reemplazamos
x
k
z
k
a
k yz
k
y
k
b
k, por lo tantox
k
y
k
a
k
b
k, y la desigualdad se escribe como
2 2 21 1 1
n n n
k k k k
k k k
a
b
a
b
(2.3)Esta †ltima desigualdad se deduce a partir de la desigualdad de Cauchy-Buniakovsky-Schwarz (CBS)
2
2 2 1 1 1
.
n n n
k k k k
k k k
a b
a
b
(2.4)En efecto, usando la desigualdad CBS tenemos
2 2 21 1 1 1
2
n n n n
k k k k k k
k k k k
a
b
a
a b
b
2 2 2 2 2 2
1 1 1 1 1 1
2
n n n n n n
k k k k k k
k k k k k k
a
a
b
b
a
b
2.6 El espacio
n,
d
p
Sea
X
n, el conjunto de todas lasn
-uplas de n†meros reales. Si
1,
2,
,
n
x
x x
x
e
1
,
2,
,
ny
y y
y
son elementos deX
, definimos la distanciad
p entrex
yy
mediante
1 1,
n p pp k k
k
d
x y
x
y
(2.6)donde
p
es un n†mero fijo mayor o igual a 1. Los axiomas m„tricos se cumplen. Para verificar la desigualdad triangular hacemos el mismo reemplazo que en el punto 2.5, y debemos entonces demostrar la llamada desigualdad de Minkowski[Minkowski]
1 1 1
1 1 1
n p n p n p
p p p
k k k k
k k k
a
b
a
b
(2.7)Para p1 la desigualdad es trivial, para p1 su demostraci•n se basa en la desigualdad de HŠlder, que es una versi•n generalizada de CBS:
[HŠlder]
1 1
1 1 1
.
n n p n q
p q
k k k k
k k k
a b
a
b
donde los n†meros
p
1
yq
1
cumplen la condici•n1
1
1
p
q
(2.9)Para demostrar (2.8), consideremos la funci•n
y t
t
con
0
. Puesto quey t
'
t
1
0
,y t
es una funci•n creciente parat
positivos. Para esos mismost
la funci•n inversat
y
1 est… definida. Si grafic…ramos lafunci•n
y
, eligiendo dos n†meros reales positivosa
yb
, y marcando los puntos correspondientes en los ejest
yy
, respectivamente, y dibujando l€neas rectas paralelas a los ejes.Obtendremos dos “tri…ngulos”, limitados por las l€neas, los ejes y la curva
y
, cuyas …reas son1 1
1
a
A
y1 2
1
1
b
A
Por otro lado, es claro que se cumple
A A
1 2
ab
. Escribimos
1
p
y1
1
q
, entonces1
1
Por lo tanto, para cualesquiera
a
yb
reales positivos, y par conjugadop q
,
tenemos p qa
b
ab
p
q
(2.10)Sustituyendo en (2.10)
1 1 k n p p i i
a
a
a
, 1 1 k n q q i ib
b
b
y sumando sobre el €ndice
k
tenemos la desigualdad de HŠlder (2.8).Ahora demostremos la desigualdad de Minkowski. Consideremos la identidad
p
p 1
p 1a
b
a
b
a
a
b
b
(2.11)Reemplacemos
a
a b
k,
b
k y sumemos sobre el €ndicek
1
11 1 1
n n n
p p p
k k k k k k k k
k k k
a
b
a
b
a
a
b
b
(2.12)
1 1 1
1 1 1 1
n n q n p n p
p p p p
k k k k k k
k k k k
a
b
a
b
a
b
(2.13)Dividiendo ambas partes por
1
1
n q
p
k k
k
a
b
Obtenemos
1 1
1
1 1 1
n p n p n p
p p p
k k k k
k k k
a
b
a
b
(2.14)2.7 Distancia de Manhattan
La Distancia de Manhattan [28] [29] [30] calcula la distancia que debe ser recorrida para llegar de un punto a otro como si se tratara de un mapa cuadriculado.
La distancia de Manhattan entre dos puntos es la suma de las diferencias de dichos puntos. La f•rmula para esta distancia entre un punto
1 2
( ,
,
,
n)
x
x x
x
y un punto1 2
( ,
,
,
n)
y
y y
y
, se obtiene de la ecuaci•n (2.6) sip
1
:1
( , )
ni i
i
d x y
x
y
(2.15)La distancia de Manhattan es medida en “las calles” en lugar de una l€nea recta. En vez de caminar directamente del punto A al punto B, con la distancia Manhattan no puedes caminar a trav„s de los edificios, sino que debes caminar por las calles.
CAP•TULO 3
Estimaci…n de Estado por
M†nimos Cuadrados Ponderados
3.1 Introducci…n
La funci•n del estimador de estado es monitorizar la operaci•n del sistema en funcionamiento normal y su objetivo es el de estimar los voltajes complejos en todos los nodos del sistema el„ctrico.
Uno de los m„todos m…s utilizados en los centros de control es el m„todo de m€nimos cuadrados ponderados, cuyo m„todo consiste en minimizar las suma de los residuos al cuadrado de las mediciones.
Un estimador de estado permite crear una base de datos confiable y completa de todas las actividades involucradas en el control y operaci•n del Sistema El„ctrico de Potencia (SEP).
estimador de estado es usado principalmente para filtrar datos superfluos, eliminar mediciones incorrectas para producir estimaciones de estado confiables, no obstante, hasta cierto punto, permite determinar los flujos de potencia en partes de la red que no son directamente medidas.
Un estimador de estado convencional normalmente involucra el siguiente conjunto de variables de estado:
Voltaje Nodal
1. Magnitud de Voltaje
V
k en el nodok
2. Angulo de Voltaje
k en el nodok
Relaci•n de transformaci•n del transformador
1. Magnitud de la relaci•n de transformaci•n
t
km en el transformadorkm
2. Angulo de la relaci•n de transformaci•n
km en el transformadorkm
El estimador de estado provee estimaciones de las variables de estado basado en la combinaci•n de mediciones y pseudo mediciones de los siguientes tipos:
Flujos: Flujos de potencia activa y reactiva medidos en ambos extremos de las l€neas y transformadores.
Inyecciones: Potencia neta activa y reactiva inyectada en los nodos.
Corrientes: Lecturas de amper€metros en ambos extremos de l€neas y transformadores.
Medidas Virtuales: Valores que vienen impuestos por restricciones de la propia red.
Pseudo-medidas: Valores basados en datos hist•ricos o en predicciones, utilizados para mejorar la redundancia en zonas poco monitorizadas.
3.2 Estimaci…n de Estado por M†nimos Cuadrados [3] [4]
[5] [6] [31] [32]
El estimador de estado para corriente alterna (ca) est… basado en un modelo de mediciones no lineal
z
h x
e
(3.1) donde:z
: vector de mediciones de dimensi•nm
,x
: vector de estado de dimensi•nn
, donden
<m
,
.
h
: vector de la funci•n no lineal que relaciona las mediciones con el vector de estado.e
: vector de error de mediciones de dimensi•nm
,,
m n
: n†mero de mediciones y variables de estado respectivamente.Los elementos de
e
se asume que tienen media cero; la correspondiente matriz de varianza est… dada porR
z.Las condiciones de optimalidad son aplicadas al desempe‚o de
J x
, la cual es expresada por
2
1
1
2
m
j j
j j
z
h x
J x
donde:
:
J x
Residuo de las medicionesDe la ecuaci•n (3.1) se tiene que encontrar la mejor estimaci•n del vector de estado
x
ˆ
del sistema, la cual consiste en resolver el problema de m€nimos cuadrados ponderados, es decir, minimizar la suma de los residuos de las medidas elevadas al cuadrado, cuya funci•n objetivo se puede rescribir como:
T
J x
z
h x
W z
h x
2 2 1m
j j
j j
z
h x
(3.3)donde
j es el elemento
j j
,
de la matriz de covarianza,R
z. La condici•n de optimalidad de primer orden para este modelo puede escribirse como:
0
T0
J x
H
x W z
h x
x
(3.4)donde
h x
H x
x
es la matriz jacobiana del vector
h x
, de dimensi•nm x n
. Se trata de encontrar el valor dex
ˆ
que satisface la ecuaci•n lineal (3.4). La forma m…s eficaz de resolver esta ecuaci•n es mediante el m„todo iterativo de Newton-Raphson. Despreciando los t„rminos donde aparecen segundas derivadas deh x
, el sistema lineal den
ecuaciones que debe resolverse en cada iteraci•n es el siguiente:
T v v
ˆ
v T
vz z
H
x W H x
x
H
x W z x
(3.5)1
ˆ
vˆ
vˆ
v
T v v
z
G
H
x W H x
(3.9)siendo:
2
i
La varianza del error en las mediciones.Figura 3.1 Diagrama de flujos del estimador de estado por m€nimos cuadrados ponderados.
Formar Ybus
Crear la matriz de ponderaciones W
Construir la matriz Jacobiana H
Calcular la matriz de Ganancias G G=HT*W*H
Formar el vector z y calcular Δz
ITER=1
Resolver el sistema GΔx=HT*W*Δz
Actualizar el vector de estado xiter+1=xiter+Δxiter
Δx < TOL ITER + 1
NO Realizar
la estimaci•n
3.3 Estructura y formaci…n de la matriz Jacobiana y del
vector z
Elementos de la matriz jacobiana de estimaci•n de estado H en forma de bloque contemplando al nodo compensador.
1 2 1 2
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 0 1 0 1 N N
ij ij ij ij
i j i j
ij ij ij ij
i j i j
N N
N N
N N N
N
N
N N
V V V
P P P P
V V
Q Q Q Q
Los t„rminos del Jacobiano correspondientes a medidas de flujos, inyecciones de potencia y voltaje est…n dadas por la Tabla 3.1.
Tabla 3.1. Ecuaciones de los elementos de la matriz jacobiana.
cos
cos
ij
i j ij ij ij ij
i
ij
i j ij ij ij ij
j
P
VV G sen B
P
VV G sen B
2 cos cos ijij i j ij ij ij ij
i
ij
i ij ij ij ij
j
P
G V V G B sen
V P
V G B sen
V
1 cos cos N ii j ij ij ij ij
j i
i
i j ij ij ij ij
j
P
VV G sen B
P
VV G sen B
1 2 cos cos N ii ii j ij ij ij ij
j i
i
i ij ij ij ij
j
P
V G V G B sen
V P
V G B sen
V
cos cos iji j ij ij ij ij
i
i
i j ij ij ij ij
j
Q
VV G B sen
Q
VV G B sen
' 2 cos cos iji ij ij j ij ij ij ij
i
ij
i ij ij ij ij
j
Q
V B B V G sen B
V Q
V G sen B
V
1 cos cos N ii j ij ij ij ij
j i
i
i j ij ij ij ij
j
Q
VV G B sen
Q
VV G B sen
1 2 cos cos N ii ii j ij ij ij ij
j i
i
i ij ij ij ij
j
Q
V B V G sen B
V Q
V G sen B
V
0 i j Vpara toda i y j
0 ; 1
Las funciones
h x
i
del vectorz
son las siguientes: Las expresiones para flujos de potencia activa y reactiva para una l€nea de transmisi•n son:
2cos
ij i j ij ij ij ij ij i
P
VV G
B sen
G V
2
'
cos
ij i j ij ij ij ij i ij ij
Q
VV G sen
B
V
B
B
Las mediciones de voltaje corresponden a:
i i
V
V
Las inyecciones de potencia activa y reactiva est…n dadas por:
1
cos
mi i j ij ij ij ij
j
P
V V G
B sen
1
cos
mi i j ij ij ij ij
j
Q
VV G sen
B
siendo
,
i jV V
: Los m•dulos de las tensiones en los nodosi
yj
.ij i j
: El fasor entre los nodosi
yj
.,
ij ij3.4 Factores de Ponderaci…n
Para cualquier medici•n la selecci•n de la ponderaci•n
W
ij se ignora, no obstante esta se puede determinar de dos formas.La primera consiste en considerar †nicamente la escala del aparato de cada medici•n y el error impl€cito. Cuando en el conjunto de mediciones se tienen inyecciones cero, es decir, mediciones perfectas, te•ricamente su peso es infinito, pero por experiencia este valor debe ser lo m…s peque‚o posible sin afectar la convergencia, por lo que este valor se debe ajustar hasta obtener resultados favorables. Un valor adecuado para la ponderaci•n cuando se tienen mediciones perfectas esta entre 0.0001 y 0.000001 [31].
La segunda forma considera que todas las mediciones son †nicamente flujos de l€neas, por lo tanto el peso puede obtenerse como la inversa de los MVA de error de los dispositivos de medici•n al cuadrado, en cada punto de medici•n.
En nuestro caso el error se expresa en por ciento, a continuaci•n se dan los errores t€picos de los instrumentos de medici•n:
Transformadores de instrumentos 2% de MVA le€dos.
Transductores 0.25% de la escala total.
Por consiguiente el factor de ponderaci•n para una l€nea medida
S
mj con un transductor de escala m…ximaF
j es:2 6
50 10
0.02
0.0035
j mj j
W
x
S
F
Donde el factor 6
50 10
x
se utiliza para normalizarB DB
' [31].3.5 Observabilidad
La observabilidad en estimaci•n de estado de Sistemas de Potencia, consiste esencialmente en determinar si las mediciones disponibles para el estimador de estado suministran suficiente informaci•n para permitir el c…lculo de las variables del Sistema de Potencia.
La prueba de observabilidad es importante para la implementaci•n de estimadores en l€nea y fuera de l€nea.
![Figura 1.1 Diagrama Esquem…tico de un centro de control “t€pico” [4].](https://thumb-us.123doks.com/thumbv2/123dok_es/4965622.75460/27.609.115.522.141.606/figura-diagrama-esquem-tico-centro-control-t-pico.webp)