Estimación de parámetros del modelo de un motor jaula de ardilla utilizando técnicas metaheuristicas
140
0
0
Texto completo
(2) DEDICATORIA. A DIOS: Por ser mí guía.. A MIS PADRES: Salomón Chuquija y Rosa Flores, por su amor y apoyo Incondicional en cada día de mi vida.. A MIS HIJOS: Schneider Chuquija y Jhoaquin Chuquija, por ser el motivo en mi vida.. i.
(3) AGRADECIMIENTO A la UNIVERSIDAD NACIONAL DE SAN AGUSTÍN, por darme la oportunidad de seguir avanzando en mi desarrollo profesional y ser un profesional al servicio de la sociedad. A mis docentes, por su visión crítica de muchos aspectos cotidianos de la vida, por su rectitud, responsabilidad, ejemplo en su profesión como docente, por sus consejos, aportes, motivación por haber compartido sus conocimientos. A mi asesor Mg. Ing. Jaime Javier Quispe Puma, un especial agradecimiento, por su valioso esfuerzo y dedicación, quien con su conocimiento, experiencia, paciencia y motivación han logrado en mí que pueda desarrollar la presente Tesis. Agradezco sinceramente a aquellas personas que compartieron sus conocimientos conmigo para hacer posible la conclusión de esta Tesis. También a las personas que han formado parte de mi vida profesional a quienes les agradezco infinitamente, por sus consejos y apoyo incondicional, en los momentos más difíciles de mi vida, donde se encuentren quiero darles las gracias y mis gratitudes de reconocimiento.. ii.
(4) RESUMEN En el mercado de los a cc iona miento s e léct rico s industriales, los requerimientos asociados con el control de calidad y el costo de fabricación de estos son importantes. En estos acc iona miento s para lograr un bajo costo de manufactura, uno de los objetivos es lograr la precisión de la estimación de velocidad. Para estimar la velocidad del motor primero se necesitan determinar los Métodos del modelo del motor. Así mismo a veces es poco práctico realizar ensayos de vacío y de rotor bloqueado para determinar los Métodos, por lo que se requieren implementar técnicas de estimación de Métodos a partir de datos de placa o llevando a cabo mediciones sencillas. En este trabajo de tesis se investigan, algunos métodos de estimación de Métodos y de estimación de velocidad que se encuentran en la literatura se investigan y se proponen algunos nuevos métodos. Estos se aplican a tres motores de inducción y los resultados de estimación se comparan con resultados de los ensayos llevados a cabo por simulación. Se realiza la evaluación de las ventajas y desventajas de estos métodos. Como resultado de este estudio, se desarrollan y se validan métodos más apropiados de estimac ión de Métodos y de velocidad aplicados a accionamientos de motores de bajo costo de fabricación.. Palabras clave: Motor de inducción, estimación de Métodos con datos de placa, estimación de la velocidad, control escalar, control vectorial.. iii.
(5) ÍNDICE. DEDICATORIA ............................................................................................................. i AGRADECIMIENTO ................................................................................................... ii RESUMEN ................................................................................................................... iii CAPÍTULO I ................................................................................................................. 1 INTRODUCCIÓN ......................................................................................................... 1 1.1. PLANTEAMIENTO DEL ESTUDIO ............................................................ 1 1.1.2. Justificación................................................................................................. 4 1.2. OBJETIVOS ................................................................................................... 5 1.3. HIPOTESIS..................................................................................................... 5 1.4. VARIABLES .................................................................................................. 6 1.5. DEFINICIÓN DE VARIABLES .................................................................... 6 1.5.1. Variable Independiente: ................................................................................ 6 1.5.2. Variable Dependiente: .................................................................................. 6 1.6. TIPO DE INVESTIGACIÓN Y DISEÑO DE LA INVESTIGACIÓN ......... 6 1.6.1. Descriptiva .................................................................................................... 6 1.6.2. Ex post facto transversal, .............................................................................. 7 1.7. METODOLOGÍA ........................................................................................... 7 1.8. RESUMEN DE CAPÍTULOS ............................................................................ 8 CAPITULO II ................................................................................................................ 9 MARCO TEÓRICO ...................................................................................................... 9 DETERMINACION DE MÉTODOS DEL MOTOR DE INDUCCION A PARTIR DE DATOS DE PLACA ............................................................................................... 9 2.1 Introducción ............................................................................................................. 9 2.2 Método 1 ................................................................................................................ 11 2.2.1 Cálculo de R r.................................................................................................. 13 2.2.2 Cálculo de Rc .................................................................................................. 14 2.2.3 Cálculo de Xm ............................................................................................. 14 2.2.4 Cálculo de X s .............................................................................................. 15 2.3 MÉTODO 2 ........................................................................................................... 15 2.3.1 Cálculo de Rc & Xm ....................................................................................... 16 2.3.2 Cálculo de Rr y X s ......................................................................................... 17 2.4 MÉTODO 3 ........................................................................................................... 18 2.4.1 Cálculo de R r.................................................................................................. 19 2.4.2 Cálculo de Rc & Xm ....................................................................................... 20 2.4.3 Cálculo de X s ................................................................................................. 20 2.5 Método 4 ................................................................................................................ 21 2.6 Método 5 ................................................................................................................ 23 2.6.1 Cálculo de Xm................................................................................................. 23 iv.
(6) 2.6.2 Cálculo de X s ................................................................................................. 23 2.6.3 Cálculo de R r.................................................................................................. 24 2.6.4 Cálculo de Rc .................................................................................................. 25 2.7 Resultados.............................................................................................................. 26 CAPÍTULO III ............................................................................................................ 34 MÉTODOS DE ESTIMACIÓN DE VELOCIDAD DEL MOTOR ........................... 34 3.1. INTRODUCCIÓN ............................................................................................ 34 3.2 MÉTODOS DE ESTIMACIÓN DE VELOCIDAD. ............................................ 36 3.2.1 Método 1 ......................................................................................................... 36 3.2.2 Método 2 ......................................................................................................... 40 3.2.3 Método 3 ......................................................................................................... 41 3.2.4 Método 4 ......................................................................................................... 43 3.2.5 Método 5 ......................................................................................................... 46 3.2.6 Método 6 ......................................................................................................... 48 3.2.7 Método 7 ......................................................................................................... 52 3.3 EVALUACIÓN DE MÉTODOS DE ESTIMACIÓN DE VELOCIDAD. ........... 54 3.4. MEDICIÓN DE PAR Y VELOCIDAD. .............................................................. 55 3.5. MEDICIÓN DE PÉRDIDAS ROTACIONALES ................................................ 56 3.6. VERIFICACION DE LA ESTIMACIÓN DE PERDIDAS EN EL NUCLEO ... 57 3.7. VERIFICACIÓN DEL CÁLCULO DEL VALOR RMS DE LA CORRIENTE DE FASE DEL ESTATOR ......................................................................................... 59 3.8. VERIFICACIÓN DEL CÁLCULO DEL VALOR RMS DEL VOLTAJE DE FASE A NEUTRON DEL ESTATOR .................................................................... 64 3.9. VERIFICACION DE LA ESTIMACION DEL FACTOR DE POTENCIA ....... 66 3.10. SIMULACIÓN DE MOTOR DE INDUCCIÓN. ........................................... 69 CAPITULO IV ............................................................................................................ 72 RESULTADOS ENSAYOS Y ESTIMACIÓN METAHEURÍSTICA ...................... 72 4.1. Ensayos ......................................................................................................... 72 4.1.1. Motor de 1,5kW ............................................................................................ 72 4.1.1.1. Datos del motor ..................................................................................... 72 4.1.1.2 Datos del ensayo a rotor libre: Medidas realizadas .................................. 72 4.1.1.3. Datos del ensayo o rotor bloqueado: Medidas realizadas ........................ 73 4.1.1.4. Obtención de los Métodos del circulo equivalente .................................. 75 4.1.2. Motor de 2,2 KW .......................................................................................... 82 4.1.2.1. Datos del motor ..................................................................................... 82 4.1.2.2. Datos del ensayo rotor libre: Medidas realizadas .................................. 82 4.1.2.3. Datos del ensayo a rotor bloqueado: Medidas realizadas ...................... 83 4.1.2.4. Obtención de Métodos del circulo equivalente ..................................... 85 4.1.3. Motor de 3,0 KW .......................................................................................... 92 4.1.3.1. Datos del motor ..................................................................................... 92 4.1.3.2. Datos del ensayo a rotor libre: Medidas realizadas ............................... 92 4.1.2.3. Datos del ensayo a rotor bloqueado: medidas realizadas......................... 93 4.1.2.4. Obtención de los Métodos del circulo equivalente .................................. 95 4.2. Stimación mediante técnicas metaheurísticas ................................................. 105 v.
(7) 4.2.1. Estimación de Métodos de la máquina de inducción asíncrona mediante el algoritmo “Shuffled Frog-Leaping”: simple y doble jaula .................................... 105 4.2.1.1. Introducción ......................................................................................... 105 4.2.2. Descripción del problema y función objetivo (doble jaula) ........................ 106 4.2.2.1. Resultados y discusión. Doble jaula..................................................... 108 4.2.3. Descripción del problema y función objetivo (simple jaula) ...................... 115 4.2.3.1. Resultados y discusión. Simple jaula .................................................. 117 CONCLUSIONES ..................................................................................................... 125 RECOMENDACIONES ........................................................................................... 127. vi.
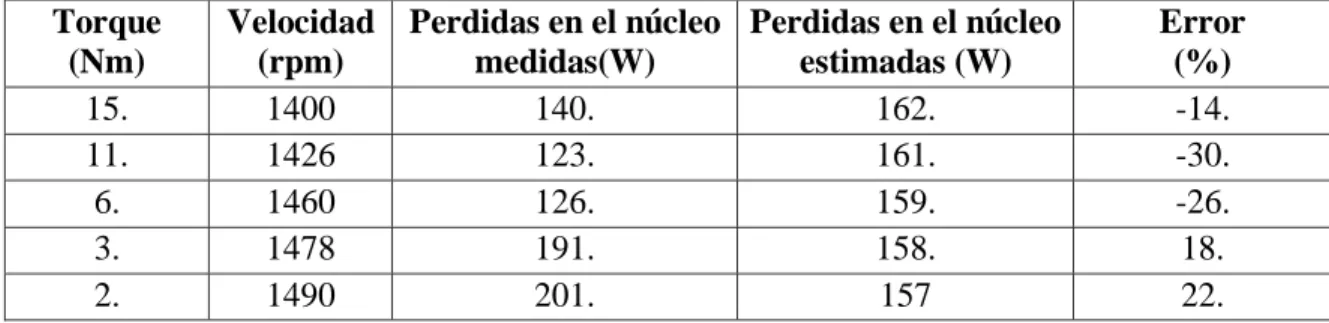
(8) LISTA DE TABLAS Tabla 3. 1 Tipos apropiados de motores y frecuencias por el método 1 ..................... 39 Tabla 3. 2 Carga computacional del método 1 ............................................................ 39 Tabla 3. 3 Tipos y frecuencias apropiadas para el método 2 ....................................... 41 Tabla 3. 4 Calculo de la carga computacional del método 2 ....................................... 41 Tabla 3. 5 Tipos y frecuencias apropiados de motores para el método 3 .................... 43 Tabla 3. 6 Carga computacional del método 3 ............................................................ 43 Tabla 3. 7 Tipos y frecuencias apropiadas del motor para el método 4 ...................... 46 Tabla 3. 8 Carga computacional para el método 4 ...................................................... 46 Tabla 3. 9 Tipos apropiados de motores y frecuencias para el método 5 .................... 48 Tabla 3. 10 Carga computacional para el método 5 .................................................... 48 Tabla 3. 11 Tipos de motores y frecuencias apropiadas para el Método 6................. 52 Tabla 3. 12 Carga computacional del Método 6.......................................................... 52 Tabla 3. 13 Tipos de motores y frecuencias apropiadas para el Método 7................. 54 Tabla 3. 14 Carga computacional del Método 7......................................................... 54 Tabla 3. 15 Evaluacion de Métodos de estimacion de velocidad ................................ 55. Tabla 4. 1. Mediciones de perdidas rotacionales vs velocidad .................................... 56 Tabla 4. 2 . Valores medidos y estimados de perdidas en el núcleo para el suministro a 60 Hz de un accionamiento con motor de inducción.................................................. 58 Tabla 4. 3 Valores estimado y medido de las perdidas en el nucleo de un motor de induccion de 2.2 Kw alimentado por un inversor. ....................................................... 58 Tabla 4. 4 Valor rmas medido y estimado de la corriente del estator del motor de inducción alimentado con una frecuencia de 60 Hz. ................................................... 62 Tabla 4. 5 Valor rmas medido y estimado de la corriente del estator del motor de inducción alimentado con inversor. ............................................................................. 63 Tabla 4. 6 . Valor rms medido y estimado de la tension de fase cuando el motor es alimentado con un inversor.......................................................................................... 65 Tabla 4. 7 Factor de potencia medido y estimado para un motor de 2.2 Kw alimentado con una frecuencia de 60 Hz ..................................................................... 68 Tabla 4. 8 Factor de potencia medido y estimado para un motor de 2.2 Kw alimentado con inversor............................................................................................... 69 vii.
(9) ÍNDICE DE FIGURAS Figura 2.1. Modelo aproximado de la maquina de inducción ..................................... 12 Figura 2.2. Diagrama de flujo del método 1. ............................................................... 12 Figura 2. 3. Diagrama de flujo del Método 2 .............................................................. 16 Figura 2.4. Circuito equivalente de la maquina de inducción. .................................... 18 Figura 2.5. Diagrama de flujo del Método 3 ............................................................... 19 Figura 2. 6. Aplicacion del teorema de Thevenin al modelo de la maquina asincrona 20 Figura 2.7. Diagrama de flujo del Método 4 ............................................................... 22 Figura 2.8. Diagrama de flujo del método 5 ................................................................ 24 Figura 2.9. Curva torque velocidad para un motor de 1.1. KW .................................. 27 Figura 2.10. Curva torque velocidad para un motor de 2.2. KW ................................ 28 Figura 2.11. Curva torque velocidad para un motor de 4 KW .................................... 28 Figura 2.12. Curvas par velocidad para el motor de 1.1 Kw ....................................... 29 Figura 2.13. Curvas par velocidad para el motor de 2.2 Kw ....................................... 30 Figura 2.14. Curvas par velocidad para el motor de 4 Kw .......................................... 30. Figura 3.1. Modelo exacto en estado estacionario del motor de induccion................. 37 Figura 3. 2 Modelo aproximado del método 3 ........................................................... 44 Figura 3. 3 Circuito equivalente modificado de la máquina de inducción ................. 49 Figura 3. 4 Aplicacion del teorema de thevenin al modelo ......................................... 49 Figura 3. 5 Circuito equivalente cuando ocurre el torque máximo ............................. 50. Figura 4. 1 Valores calculado y medido de perdidas en el nucleo para el accionamiento con motor de inducción con una f =60 Hz................................................................... 58 Figura 4. 2 Corrientes medidas en el estator a 30 Hz ................................................. 59 Figura 4. 3 Corrientes medidas en el estator a 70 Hz .................................................. 60 Figura 4. 4 Valor rms estimado y medido de la corriente cuando el motor es alimentado con una frecuencia de 60 Hz........................................................................................ 61 Figura 4. 5 Valor rms estimado y medido de la corriente cuando el motor es alimentado con una frecuencia de 30 Hz........................................................................................ 62 Figura 4. 6 Voltaje de fase a neutron medido a 30 ...................................................... 64 Figura 4. 7 Voltaje de fase a neutro medido a 70 Hz ................................................. 64. viii.
(10) Figura 4. 8 Valor rms de voltaje de fase a neutro medido y estimado cuando el motor es alimentado con una frecuencia de 30 Hz con inversor............................................ 65 Figura 4. 9 Ejes magneticos del motor ........................................................................ 66 Figura 4. 11 se muestra la compracion de la parte lineal de la curva de par velocidad obtenidas por mediciones y por simulacion ................................................................ 70 Figura 4. 12 Curvas de torque velocidad, elaboradas para 10, 30, 60 y 70 Hz ........... 70 Figura 4. 10 .Diagrama de flujo de la simulación del modelo..................................... 71. ix.
(11) CAPÍTULO I INTRODUCCIÓN 1.1. PLANTEAMIENTO DEL ESTUDIO 1.1.1. Antecedentes Según (Wook J. 2005), plantea un nuevo algoritmo de optimización no lineal, DEAS (Algoritmo de Codificación Dinámica para búsquedas), es propuesto y aplicado a la identificación paramétrica del MI, junto con CTPEM (Método de Predicción en Tiempo Continuo) y AGA (Algoritmo Genético Adaptativo). DEAS se demuestra que es eficaz tanto en términos de la exactitud de los parámetros indicados y el tiempo de ejecución. Dado que todos los parámetros en el modelo dinámico del motor se identifican de forma simultánea, la técnica de identificación propuesta puede ser utilizada como una herramienta de detección de fallas, así como ajuste de ganancia del control vectorial. (Cerqueira N. 2007), en su artículo del hace un estudio en la identificación de parámetros basados en el método de tiempo continuo. Una señal de GBN (Ruido Binario Generalizado) generada por el inversor de la misma unidad, se. 1.
(12) utiliza para estimar los parámetros utilizando mediciones de tensión y corriente. En el método directo los parámetros del modelo continuo son estimados directamente con la construcción de la expresión no lineal por mínimos cuadrados. En el método indirecto, una primera fase de identificación de los parámetros de un modelo en tiempo discreto y en una segunda fase la transformación de los parámetros correspondientes a los parámetros físicos. La principal ventaja del método indirecto en comparación con el método directo es clara, ya que se requiere menos esfuerzo computacional. Las pruebas experimentales que se obtuvieron en el método indirecto da una buena precisión, pero algunas veces el algoritmo no converge a resultados válidos. En este documento escrito por (Karimí A. 2007) se propone un algoritmo de optimización por enjambre (cúmulo) de partículas (PSO) con un factor de constricción el cual es aplicado para determinar los parámetros del motor de inducción. Las variables utilizadas para calcular los parámetros eléctricos y mecánicos son las medidas de corrientes del estator y tensiones. Este trabajo fue simulado con el fin de mostrar su desempeño comparándolo con mínimos cuadrados. Los resultados mostraron que el algoritmo PSO es una técnica poderosa y puede ser utilizada en situaciones reales en las cuales exista ruido y un número limitado de mediciones. En este artículo publicado por (Zhenfeng C. 2008), se hace la identificación de parámetros del motor de inducción mediante la técnica de optimización por colonia de hormigas, haciendo la comparación con otros algoritmos utilizados. Los resultados revelan que esta técnica puede arrojar más parámetros exactos. 2.
(13) del modelo y necesitan menos tiempo computacional que AG (Algoritmo Genético) y AGA (Algoritmo Genético Adaptativo). En este documento escrito por (Azzolin R. 2009) se propone un nuevo un método para la determinación de los parámetros eléctricos de motores de inducción basado en un algoritmo RMRAC (Control Adaptativo de Referencia para Modelos Robustos). La principal contribución del trabajo propuesto es el desarrollo de un método automatizado para obtener los cinco parámetros eléctricos de las máquinas de inducción. Resultados de la simulación demuestran la convergencia de los parámetros a los valores ideales. Experimentalmente, se demuestra que los parámetros convergen a valores diferentes si se compara con las pruebas clásicas.. 3.
(14) 1.1.1. Problema a investigar El problema básico radica en que no existe una técnica única de estimación de parámetros ni un modelo único que represente el comportamiento de la máquina. Sin embargo la técnica meta heurística shuffled frog leaping algorithm, que se presenta, ha ofrecido resultados que responden con fidelidad a los datos aportados por el fabricante y en un tiempo de procesado menor al de otras técnicas comparadas 1.1.2. Justificación Las técnicas de optimización se basan en definir una función objetivo y una serie de restricciones soluciones. factibles.. Las. que. se. deben. cumplir, para buscar. técnicas meta heurísticas (poblacionales). se basan, en explorar mediante individuos dotados de una serie de propiedades el espacio de búsqueda y localizar soluciones factibles. La metodología de las técnicas y los parámetros a utilizar es el trabajo que desarrollan. los investigadores para optimizar la búsqueda, en su. aplicación a las máquinas de inducción.. Una parte importante de del. presente trabajo tesis se ha basado en el estudio de técnicas meta heurísticas de optimización y su aplicación en la obtención de los parámetros del circuito equivalente del motor de inducción, podemos citar: Técnicas Heurísticas Swarm Intelligence; Shuffed frog leaping algorithm; Genetic optimization algorithms;. Particle swarm. optimization, Ant colony optimization.. 4.
(15) 1.2. OBJETIVOS. 1.2.1. Objetivo General Estimación de los parámetros del modelo de un motor jaula de ardilla utilizando técnicas meta heurísticas.. 1.2.2. Objetivos específicos. a) A partir de la teoría electromagnética se definirá y propondrá un modelo de circuito equivalente.. b) El circuito, fruto de simplificaciones, será el que se adopte como representativo de la máquina de inducción.. c) Para simplificar el modelo se realizará la conversión de los ejes de referencia del trifásico abc a bifásico dq0.. 1.3. HIPOTESIS A partir de la teoría electromagnética se define y propone un modelo de circuito equivalente. El circuito, fruto de simplificaciones, es el que se adopta como representativo de la máquina de inducción, se amplía el estudio a motores de simple y doble jaula. Las ecuaciones que responden al circuito son eléctricas y mecánicas. Para simplificar el modelo se realiza la conversión de los ejes de referencia del trifásico abc a bifásico dq0, dicha. 5.
(16) conversión es la se realiza en simulación. También se incluye en modelo de simulación y diagrama de bloques de Simulink. 1.4. VARIABLES 1.4.1. Variable Dependiente Técnicas meta heurísticas 1.4.2. Variable Independiente Parámetros del modelo de un motor jaula de ardilla 1.5. DEFINICIÓN DE VARIABLES 1.5.1. Variable Independiente: Los parámetros del modelo de un motor jaula de ardilla, se describen mediante ensayos el procedimiento para obtener los parámetros del circuito equivalente de la máquina de inducción. 1.5.2. Variable Dependiente: Las técnicas metan heurísticas son muy importantes ya que nos permiten la optimización y su aplicación en la obtención de los parámetros del circuito equivalente del motor de inducción. 1.6. TIPO DE INVESTIGACIÓN Y DISEÑO DE LA INVESTIGACIÓN Es una investigación de tipo descriptivo y de diseño ex post facto transversal. 1.6.1. Descriptiva, se van a describir los pasos requeridos para la implementación de los parámetros del modelo de un motor jaula de ardilla , donde cada uno de sus elementos serán descritos y también medidos para lograr la correcta operatividad de estos. 6.
(17) 1.6.2. Ex post facto transversal, es decir después de sucedidos los ensayos y pruebas, se van a plantear las técnicas meta heurísticas. Transversal dado que el estudio de las variables planteadas en el método a proponer, se van a medir en un determinado momento en el tiempo. 1.7. METODOLOGÍA Cuadro 1. Metodología de la Investigación BUSQUEDA DE INFORMACION. ELABORACION DEL MARCO TEÓRICO. RECOLECCION DE DATOS. ANALISIS DE DATOS. VALIDACION DE DATOS. INTERPRETACION DE RESULTADOS. CONCLUSIONES. RECOMENDACIONES. Fuente: Elaboración propia. 7.
(18) 1.8. RESUMEN DE CAPÍTULOS. Capítulo 1.-Hablamos acerca de los antecedentes, problema a investigar, la justificación del tema de estudio, la hipótesis, las variables que se tomaron en cuenta, el tipo de investigación y diseño del mismo, la metodología a utilizarse en el caso de estudio.. Capítulo 2.-En este capítulo se incluye una breve explicación de los métodos de estimación de parámetros propuestos. En este capítulo también se investigan los resultados de los métodos de estimación de parámetros. Capítulo 3.-En este capítulo se lleva a cabo la investigación de algunos métodos de estimación de velocidad que se encuentran en la literatura, así mismo se describen algunos métodos propuestos. Así mismo en este capitulo se presenta el marco teórico de estos métodos. Capítulo 4.- Se lleva a cabo la implementación de las pruebas y la simulación. Aqui se explica brevemente todos los casos de estudio que se implementan para llevar a cabo las pruebas y simulaciones. Luego se explica la calibración de los módulos de medición de tensión y corriente. Se explica como se pueden obtener los registros de mediciones de par, de velocidad y de pérdidas rotacionales.. 8.
(19) CAPITULO II MARCO TEÓRICO DETERMINACION DE MÉTODOS DEL MOTOR DE INDUCCION A PARTIR DE DATOS DE PLACA 2.1 Introducción La mayoría de los variadores de velocidad se utilizan en aplicaciones industriales. En tales aplicaciones, los factores más importantes son la facilidad de arranque y el bajo costo de operación. Para llevar a cabo el arranque del motor se deben conocer los Métodos del motor y sus datos nominales. Introduciendo esta información en el variador, normalmente se estima la velocidad del motor y se ejecuta algún tipo de control de velocidad. Por ejemplo si puede seleccionar el sistema en el modo de control de la velocidad o en modo de control de par. Uno de los métodos clásicos para la determinación de Métodos ese en base a ensayos de vacío y de rotor bloqueado. Estos métodos clásicos de determinación de Métodos son a veces poco prácticos para la puesta en marcha de un accionamiento. Para simplificar el proceso de arranque, los Métodos del motor se pueden estimar a partir de datos del fabricante, algoritmos de calculo que puede ser implementado en el procesador del sistema. De la revisión de a bibliografía (Science Citation Index 1945-2004 y archieves IEEE), se tiene que sólo tres métodos de investigación se encuentran en este tema. En uno de estos métodos, los Métodos del motor se estima a partir de datos del fabricante utilizando un método numérico [17]. Este método de estimación de Métodos fuera de línea requiere un ordenador y el software necesario para realizar 9.
(20) los cálculos. En este método, los valores iniciales de los Métodos del motor se calculan con algunas suposiciones. Posteriormente, cada Método toma como valor inicial cero y el algoritmo se ajusta con pequeños pasos de integración. Este tamaño de paso define la precisión del cálculo. Para cada posible combinación de Métodos, se utiliza el circuito equivalente exacto de la máquina de inducción y se determinan la potencia mecánica, potencia reactiva a plena carga y el par máximo. Los resultados de estos cálculos se comparan con los datos suministrados por el fabricante y finalmente se definen los errores de la diferencia de estos. Luego, cada error se pondera de acuerdo con la importancia de los cálculos, esta etapa es definida por el usuario. Para cada combinación posible se calcula el peso total de los errores. Este método finaliza seleccionando Métodos del motor considerando el peso con el mínimo error. Se observa en la bibliografía analizada que este método se aplica a 223 motores y el error de este método es casi el 1%. En [26], se estiman Métodos del motor se a partir de datos de fabricante, tales como datos de la placa y características de rendimiento del motor. Este método se basa en la técnica de optimización no lineal. Por lo tanto, este método no es adecuado para ser incorporado en un microprocesador de bajo rendimiento. En [27], el método de estimación de Métodos requiere los datos de placa, la relación de par de arranque a par de plena carga y los valores de eficiencia y factor de potencia en media y plena carga. Puesto que los datos del motor a media carga no son accesibles según los datos del fabricante, este método no es adecuado para el objeto de este estudio. Dado que estos métodos no son adecuados para ser incorporados en un microprocesador de bajo rendimiento, se decidió proponer un método que tiene una buena precisión con menor carga de cálculo. En este capítulo, se proponen varios métodos para la predicción de los Métodos del motor a partir de datos suministrados por el fabricante ó de datos de placa del motor. Estos métodos se aplican a motores de 1,1 kW, 2,2 kW y 4 kW. Para verificar los métodos propuestos, adicionalmente se llevan a cabo las pruebas de vacío y de rotor bloqueado a estos motores. Los Métodos del motor se calculan 10.
(21) a partir de estos ensayos y los resultados se comparan con los Métodos estimados de motor. Las características de par-velocidad estimadas de los motores analizados también se comparan con mediciones a 60Hz. Se observa que el accionamiento funciona normalmente en la porción de la curva torque velocidad, desde la velocidad sin carga hasta la velocidad a plena carga, por lo tanto, se validan las estimaciones para esta parte de la curva de torque velocidad. Se observa que algunos datos suministrados por el fabricante pueden ser diferentes de los resultados de las estimaciones. Las predicciones de Métodos se realizan utilizando datos del fabricante y se presentan en el Apéndice A. Sin embargo, todas las predicciones de Métodos en esta parte se realizan en base a de datos de placa del motor determinados a partir de las pruebas en los tres motores. El desempeño previsto para el método propuesto de identificación de Métodos (par motor, factor de potencia, corriente del estator) se compara con el desempeño del método clásico en base a los ensayos sin carga y de rotor bloqueado de los motores y con las mediciones llevadas a cabo en los motores. En los siguientes acápites, se describe cada uno de los métodos propuestos.. 2.2 Método 1 En este método, se utiliza el modelo aproximado del circuito, que se ve en Fig.2.1. Se emplean las siguientes variables: la tensión nominal, corriente nominal, el factor de potencia nominal, la potencia de salida, la frecuencia, la velocidad del rotor y la resistencia del estator medida para estimar los Métodos del motor. En la figura 2.2. se observa el diagrama de flujo de este método. Este método se resume a continuación.. 11.
(22) Figura 2 Figura 2.1. Modelo aproximado de la máquina de inducción. DATOS DE ENTRADA: Psal, I, V, s Rs, cos phi. Calcula Perdidas eléctricas en el rotor Calcula la resistencia del rotor referida al lado del estator. Calcula las perdidas eléctricas en el estator. Calcula Perdidas magneticas. Calcula la resistencia de la rama de magnetización Calcula la reactancia de la rama de magnetización. Imprimir la impedancia equivalente y calcular la reactancia de dispersión del estator. Figura 2.2. Diagrama de flujo del método 1.. 12.
(23) En este método se supone que las pérdidas por fricción y ventilación son iguales al 1% de la potencia de salida. Otra hipótesis es que para llevar a cabo el cálculo de la reactancia de magnetización se desprecia la reactancia de dispersión del estator. Para lo cual se supone que la parte imaginaria de la corriente del estator fluye solo a través de la reactancia de magnetización. Las pérdidas en el cobre del rotor se pueden calcular conforme a la ecuación (2.5).. donde. PAG es la potencia en el entrehierro, P F & W son las pérdidas por fricción y ventilación P RCL son las pérdidas en el cobre del rotor, P out es la potencia de salida, s es deslizamiento, lr es la corriente del rotor R r es la resistencia del rotor.. 2.2.1 Cálculo de R r La corriente referida del rotor se puede expresar como:. Donde VФ es el voltaje de fase Asumiendo que:. 13.
(24) Si las suposiciones consideradas son válidas entonces la corriente del rotor y las perdidas en el cobre del rotor se pueden formular de la siguiente manera. De la equacion (2.9). En la ecuación (2.10) solo es incógnita la Resistencia del rotor referida, entonces la Resistencia se calcula de la raíz cuadrada de la ecuación (2.10):. 2.2.2 Cálculo de Rc Las pérdidas en el núcleo se calculan conforme a la ecuación (2.14). Donde PSCL son las pérdidas en el cobre del estator. Rc es calculada según la ecuación (2.15). 2.2.3 Cálculo de Xm Se asume que parte imaginaria de la corriente del estator fluye sobre reactancia de magnetización.. 14.
(25) 2.2.4 Cálculo de X s La impedancia equivalente del modelo se calcula de acuerdo a la ecuación (2.17).. Si la tangente del Angulo de carga se escribe tal como en la ecuación (2.18), reemplazando las igualdades de A y B, se puede obtener la ecuación (2.20). En la ecuación (2.20) solo es incógnita la reactancia de sipersión y esta puede ser Calculada sacando la raíz cuadrada a la ecuación (2.20). 2.3 MÉTODO 2 En este método también se utiliza el modelo aproximado del motor de inducción de forma similar como en el Método 1.. Para llevar a cabo la estimación de parámetros del modelo s utilizan la tensión nominal, corriente nominal, factor de potencia nominal, la potencia de salida, la frecuencia, la velocidad del rotor y la resistencia del estator medida. En la figura 2.3 se muestra el diagrama de flujo de este método. Este método se resume a continuación. Las pérdidas en el cobre del rotor y las pérdidas por fricción y ventilación se asumen ser iguales a 1% de la potencia de salida. 15.
(26) INGRESO DEDATOS. Calcula Perdidas eléctricas en el rotor. Calculo de las Perdidas magnéticas utilizandor las perdidas eléctricas exactas de estator Determinar Rc Determinar Xm Introducir las perdidas eléctricas en el rotor utilizando el teorema de thevenin y determinar Xs en función de Rr. Imprimir la impedancia equivalente. Imprimir la tangente del angulo del factor de potencia utilizando la impedancia equivalente. Insertar la igualdad de Xs que fue determinado en la ecuación anterior(solo Rr es incognita) Determinar Xs y luego Rr. Figura 2. 3. Diagrama de flujo del Método 2. 2.3.1 Cálculo de Rc & Xm Para llevar a cabo este cálculo la única diferencia es que las pérdidas en el cobre del estator se calculan a partir del modelo excato del circuito.. 16.
(27) Rc se calculó utilizando la ecuación (2.2). La reactancia de magnetización se calculó de acuerdo al modelo 1.. 2.3.2 Cálculo de Rr y X s Las pérdidas en el cobre del rotor se calculan conforme a la ecuación (2.25). La diferencia más importante entre el Método 1 y el Método 2 se encuentra en el cálculo de las pérdidas en el cobre del rotor. En el cálculo de la corriente del rotor de acuerdo con este método, no se desprecia el efecto de las reactancias de dispersión del estator y de la reactancia de dispersión referida del rotor.. En la ecuación (2.25) se hace referencia la sustitución de la ecuación de la corriente del rotor, y se realiza el cálculo de la reactancia de dispersión del estator en función de la resistencia del rotor, conforme a la ecuación (2.26).. Si se consideran la impedancia equivalente y tan φ, la reactancia de dispersión del estator se determina como una función de la resistencia referida del rotor.. Sustituyendo la igualdad de Xse2 que se tienen en la ecuación (2.26), en la ecuación (2.28) 17.
(28) Si se calcula el cuadrado de la ecuación (2.29) y si se sustituye la igualdad 4Xs exp 2 en la ecuación (2.26), se obtiene la siguiente ecuación (2.30) que no depende de la reactancia de dispersión del estator.. En la ecuación (2.30), sólo se desconoce la resistencia referida del rotor. Este valor se halla mediante el cálculo de la raíz cuadrada de la ecuación (2.30). La reactancia de dispersión del estator se calcula sustituyendo la Resistencia referida del rotor calculada en la ecuación (2.29).. 2.4 MÉTODO 3 En este método, se emplea el modelo de circuito equivalente en estado estacionario, que se ve en Fig2.4. Para este circuito sólo se utilizan los valores de tensión nominal, corriente nominal, factor de potencia nominal, potencia de salida, frecuencia y velocidad del motor. Para establecer las condiciones iniciales, se supone que la reactancia de dispersión del estator es igual a cero. El diagrama de flujo de este método se ve en la Fig.2.5. Este método se resume a continuación.. Figura 2.4. Circuito equivalente de la máquina de inducción.. 18.
(29) DATOS DE ENTRADA. Asumir que Xs = 0. Calcular Em. Calcular Rr utilizando las perdidas eléctricas en el rotor. Calcular Xm. Calcular las perdidas magnéticas y luego Rc. Imprimir la igualdad de la potencia en el entrehierro utilizando el circuito equivalente de thevenicn (Solo Xs seria la incognita). Calcular Xs. Figura 2.5. Diagrama de flujo del método 3. 2.4.1 Cálculo de R r La tensión inducida Em y las pérdidas en el cobre del rotor se calculan utilizando las ecuaciones (2.31) y (2.32) respectivamente.. 19.
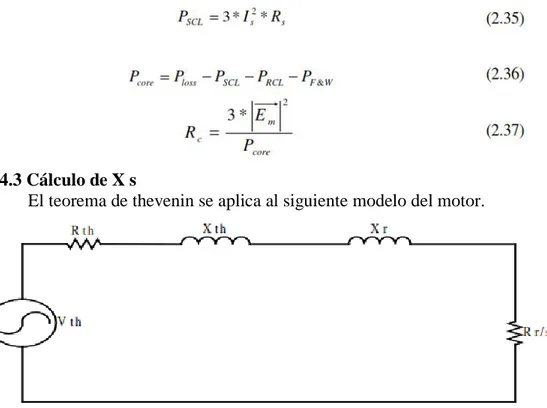
(30) Si se arregla la ecuación (2.32) entonces se obtendrá la ecuación (2.33). Las pérdidas en el cobre del rotor se calculan usando la ecuación (2.5). En la ecuación (2.33) solo la resistencia referida del rotor se desconoce. Esta resistencia se calcula mediante la resolución de la ecuación (2.33).. 2.4.2 Cálculo de Rc & Xm Se asume que la parte imaginaria de la corriente del estator fluye sobre la reactancia de magnetización. Esta resistencia se calcula utilizando la ecuación (2.34).. Las pérdidas en el núcleo y Rc se calculan mediante el uso de las ecuaciones (2.36) y (2.37) respectivamente.. 2.4.3 Cálculo de X s El teorema de thevenin se aplica al siguiente modelo del motor.. Figura 2. 6. Aplicación del teorema de Thevenin al modelo de la maquina asíncrona. 20.
(31) La potencia del entrehierro se calcula con la ecuación (2.42). En la ecuación (2.43) sólo se desconoce la reactancia de dispersión. Esta reactancia se calcula mediante el cálculo de la raíz cuadrada de la ecuación (2.43). Para finalizar la estimación de Métodos, no se utiliza ningún criterio de parada. El procedimiento explicado anteriormente se itera 3 veces con nuevos valores.. 2.5 Método 4 En este método, todos los cálculos son los mismos que se presentaron en el método 3. Los datos utilizados también son los mismos de este método. El diagrama de flujo de este método se visualiza en Fig.2.8. Este método se resume a continuación.. Las diferencias entre los métodos 3 y 4 se encuentran en la forma de determinar los criterios de parada de las iteraciones y en algunas suposiciones que son sujetas 21.
(32) a cambios. Por ejemplo, se asume que el 0.95 Is sen (φ) fluye en Xm. En el Método 3, los resultados son iterados tres veces.. Sin embargo, en este método, se calcula primero el factor de potencia del circuito equivalente y cuando alcanza el (factor de potencia nominal ± 5%), se detiene la iteración.. DATOS DE ENTRADA. Asumir que Xs = 0. Calcular Em. Calcular Rr utilizando las perdidas eléctricas en el rotor. Calcular Xm. Es el factor de potencia igual o ±0.95 del cos phi nominal. Parar. Calcular las perdidas magnéticas y luego Rc. Imprimir la igualdad de la potencia en el entrehierro utilizando el circuito equivalente de thevenicn (Solo Xs seria la incognita) Calcular Xs Calcular la impedancia equivalente y el factor de potencia. Figura 2.7. Diagrama de flujo del método 4 22.
(33) 2.6 Método 5 En este método, se utiliza el circuito equivalente exacto que se muestra en la Fig.2.4. Además, cabe mencionar que en este método se utilizan los siguientes datos de entrada: la tensión nominal, corriente, frecuencia, velocidad, factor de potencia, la potencia de salida y la resistencia del estator medida. En la Fig. 2,9 se visualiza el diagrama de flujo de este método. El método se resume a continuación.. 2.6.1 Cálculo de Xm Se supone que el 95% de la parte imaginaria de la corriente del estator fluye sobre reactancia de magnetización. Se desprecia la reactancia de dispersión del estator y la reactancia de magnetización se calcula con la ecuación (2.44).. 2.6.2 Cálculo de X s En esta parte se asume que el circuito del rotor es puramente resistivo, la reactancia de dispersión del estator es igual a la reactancia de dispersión del rotor y el 0,95 de la parte imaginaria de la corriente del estator fluye sobre la reactancia de magnetización.. La potencia reactiva del estator se calcula utilizando la ecuación (2.46). Considerando que la ecuación de potencia reactiva está escrita en función de la parte reactiva de la corriente, se obtiene la ecuación (2.47). En esta ecuación solo se desconoce la reactancia de dispersión del estator. Por lo tanto, se resuelve la ecuación (2.47) para hallar la reactancia de dispersión del estator.. 23.
(34) DATOS DE ENTRADA. Se desprecia Xs = 0 y se calcula Xm. Se asume que el circuito del rotor es puramente resistivo. Imprimir la ecuación de potencia reactiva y calcular Xs. Calcular las perdidas magnéticas. Despreciar la caída de tensión y calcular Rc. Calcular<tem Calcular< la corriente del rotor y Rr Calcular las perdidas en el núcleo y Rc. Figura 2.8. Diagrama de flujo del método 5. 2.6.3 Cálculo de R r Inicialmente las pérdidas en el núcleo se calculan utilizando la ecuación (2.49).. 24.
(35) Se desprecia la caída de tensión en el estator y se calcula Rc. Se supone que hay un desplazamiento de fase de casi 90º entre la corriente referida del rotor y la de magnetización. Entonces, la corriente referida del rotor se calcula a partir de la ecuación (2.51). Se supone que las pérdidas mecánicas y pérdidas por corrientes parásitas son iguales al 0,01 de la potencia de salida. Se calcula el par electromecánico utilizando la ecuación (2.52).. Si se determina el par electromecánico con la ecuación (2.53), entonces solo se desconocerá la resistencia referida del rotor. Esta resistencia se calcula conforme a la ecuación (2.53).. 2.6.4 Cálculo de Rc En esta parte, se corrige el valor de Rc. En primer lugar, se calculan las pérdidas en el núcleo a partir de la ecuación (2.54).. Rc se calcula sustituyendo la ecuación (2.55) en la ecuación (2.56). 25.
(36) 2.7 Resultados Para evaluar los métodos de estimación de Métodos, se seleccionan motores de inducción de 1.1kW, 2,2 kW y 4 kW como motores de prueba. Los datos de placa de estos motores proporcionados por el fabricante y los resultados de las pruebas se presentan en el Anexo A. También los resultados de las pruebas de vacío y de rotor bloqueado se dan en el Anexo B. Como se ha indicado anteriormente para evaluar los métodos de estimación de Métodos, primero se utilizan los datos de placa y luego estos motores son sometidos a pruebas. En las Tablas 2.1, 2.2 y 2.3, se presentan los Métodos calculados de las pruebas de vacío y de rotor bloqueado, así como los Métodos estimados del motor. De esta manera, se evitan los datos erróneos que se tienen en las características de placa y se verifican los métodos de estimación de Métodos.. Además de estas comparaciones, se recomienda evaluar las características parvelocidad, que se obtienen a partir de Métodos calculados de los ensayos de vacío y de rotor bloqueado y de los Métodos estimados. Las curvas de par-velocidad se trazan de acuerdo con el circuito equivalente exacto que se muestra en la Fig.2.4.. Valor calculado. Parámetro. Estas curvas de par velocidad muestran en las Fig.2.9, Fig.2.10 y Fig.2.11.. Método 1 Est. Err. (%). Método2 Est. Err(% ). Método 3 Est. Err. (%). Rs 6.80 6.80 6.80 6.80 Rr 6.60 9.20 -39.40 5.70 13.60 8.20 Xs 9.40 0.00 100.00 9.20 2.10 5.60 Xm 87.80 105.60 -20.30 105.60 -20.30 93.90 Rc 1014.00 482.90 52.40 837.30 17.40 665.50. Método 4 Est. Err. (%). 6.80 -24.20 7.30 40.40 11.00 -6.90 88.90 34.40 596.90. Método 5 Est. Err(% ). 6.80 -10.60 6.90 -17.00 4.40 -1.20 100.30 41.10 7215.00. -4.50 53.20 -14.20 28.80. Tabla 2.1. Parámetros calculados a partir de los ensayos de vacio y rotor bloqueado y parámetros estimados de un motor de 1.1 KW. 26.
(37) Valor calculado. parámetro. Método 1 Est. Err. (%). Método 2 Est. Err. (%). Método 3 Est. Err. (%). Método 4 Est. Err. (%). Método 5 Est. Err. (%). Rs 3.30 3.30 3.30 3.30 3.30 3.30 Rr 3.50 3.40 2.90 3.50 0.00 3.20 8.60 3.00 14.30 3.00 14.30 Xs 5.10 0.00 100.00 1.00 80.40 2.40 52.90 4.70 7.80 1.80 64.70 Xm 98.40 86.10 12.50 86.10 12.50 78.40 20.30 76.30 22.50 83.20 15.40 Rc 1435.00 510.10 64.40 823.40 42.60 688.80 52.00 652.40 54.50 716.40 50.10. Tabla 2.2. Parámetros calculados a partir de los ensayos de vacio y rotor. parámetro. Valor calculado. bloqueado y parámetros estimados de un motor de 2.2 KW. Rs Rr Xs Xm Rc. 3.90 3.90 3.90 3.90 3.90 3.90 4.20 4.00 5.00 4.10 2.40 3.90 7.10 3.60 14.30 3.60 14.30 6.60 0.00 100.00 1.50 77.30 2.50 62.10 7.30 -10.60 2.60 60.60 136.50 129.50 5.10 129.50 5.10 121.60 10.90 117.20 14.10 128.70 5.70 1382.00 800.90 42.00 1109.10 19.80 983.20 28.90 913.00 33.90 _ 26.90 1010.7. Método 1 Est. Err. (%). Método 2 Est. Err. (%). Método 3 Est. Err. (%). Método 4 Est. Err. (%). Método 5 Est. Err. (%). Tabla 2.3. Parámetros calculados a partir de los ensayos de vacio y rotor bloqueado y parámetros estimados de un motor de 4 KW. Figura 2.9. Curva torque velocidad para un motor de 1.1. KW. 27.
(38) Figura 2.10. Curva torque velocidad para un motor de 2.2. KW. Figura 2.11. Curva torque velocidad para un motor de 4 KW. 28.
(39) Al llevar a cabo el análisis de resultados se observa que el método 4 puede ser identificado como el mejor método de estimación, brindando en general una buena predicción para toda la curva de par-velocidad de los tres motores, cuando se compara con la estimación de la curva par-velocidad con Métodos de las pruebas. Se conoce que el motor trabaja normalmente en la porción de la curva de parvelocidad entre la velocidad sin carga y velocidad a plena carga, entonces es aconsejable comparar los resultados de estos métodos de estimación en la región lineal de la curva de par-velocidad. Por lo tanto, se presenta la zona lineal de las curvas de torque velocidad tal como se muestra en Fig.2.13, Fig.2.14 y Fig.2.15.. Figura 2.12. Curvas par velocidad para el motor de 1.1 Kw. 29.
(40) Figura 2.13. Curvas par velocidad para el motor de 2.2 Kw. Figura 2.14. Curvas par velocidad para el motor de 4 Kw. 30.
(41) Cuando se comparan las regiones lineales de las curvas de par-velocidad, se ve que El método 4 tiene la predicción más cercana a la curva de par-velocidad de referencia obtenida con los ensayos Tal como se muestra en las Fig.2.13, Fig.2.14 y Fig.2.15, los valores de torque estimados son mayores que los torques medidos. Cuando el par se toma como referencia y las velocidades estimadas son comparadas con las de referencia, el error es de casi el 1%. Sin embargo, cuando se toma como referencia la velocidad y los pares estimados se comparan con los de referencia, el error del Método 4 es casi del 10%. Se compara el desempeño los motores a partir de los resultados de los ensayos, de los obtenidos con Métodos estimados y el desempeño de las mediciones del motor en condiciones de par nominal. El cálculo los valores en las tablas se realiza para un deslizamiento correspondiente al par de carga nominal durante las pruebas realizadas. Esta comparación se muestra en las Tabla 2.4, Tabla 2.5. y Tabla.2.6.. Método 1 (%error). 11.2 Nm 0.75. -6.20. 1.80. -22.30. 1.80. 6.20. -17.00. 6.70. -6.70. -4.00. 2.70. 9.30. -6.70. 3.15 A. -8.20. 4.40. -12.40. 0.30. -3.27. -6.00. de las pruebas Torque Factor de potencia Corriente del estator. Parámetros Estimados Método 2 Método 3 Método 4 (%error) (%error) (%error). Parámetros calculados (% error). Variables Resultados. Método 5 (%error). Tabla 2.4. Comparación del desempeño de los resultados de la aplicación de los Métodos de estimación de parámetros y de los ensayos de vacío y rotor bloqueado para un motor del 1.1 KW.. 31.
(42) Método 1 (%error). 14.6 Nm 0.84. 4.10. -11.60. -6.80. -11.00. -8.20. -19.20. 1.20. -7.10. -4.80. -1.20. 3.60. -4.80. 4.87 A. 5.50. -4.70. -0.60. -9.60. -12.00. -12.90. de las pruebas Torque Factor de potencia Corriente del estator. Parámetros Estimados Método 2 Método 3 Método 4 (%error) (%error) (%error). Parámetros calculados (% error). Variables Resultados. Método 5 (%error). Tabla 2.5. Comparación del desempeño de los resultados de la aplicación de los Métodos de estimación de parámetros y de los ensayos de vacío y rotor bloqueado para un motor del 2.2 KW.. Método 1 (%error). 26.8 Nm 0.83. 9.00. -5.20. -0.80. -3.70. -0.80. -11.60. 4.80. -4.80. -1.20. 0.00. 6.00. -2.40. 9.08 A. 7.80. -1.50. 2.30. -2.90. -7.10. -6.50. de las pruebas Torque Factor de potencia Corriente del estator. Parámetros Estimados Método 2 Método 3 Método 4 (%error) (%error) (%error). Parámetros calculados (% error). Variables Resultados. Método 5 (%error). Tabla 2.6. Comparación del desempeño de los resultados de la aplicación de los Métodos de estimación de parámetros y de los ensayos de vacío y rotor bloqueado para un motor del 4 KW.. En las Tablas.2.4, Table.2.5 y Table.2.6, el error se define conforme a la ecuación (2.57).. 32.
(43) En la evaluación del desempeño de los resultados de la estimación de Métodos del motor, se considera el error promedio .. Cuando se evalúa la Tabla 2.4, se muestra que el Método 3 y El método 1 son mejores que otros métodos para el motor de 1.1kW. Así mismo se muestra en la Tabla 2.5 que el método 2 es mejor que otros métodos para el motor de 2.2kW. Para el motor de 4kW, el método 2 y el método 3 son más adecuados que otros métodos. Cuando todos los motores de prueba son considerados, el método 3 se puede identificar como el mejor método de estimación. La carga computacional de los métodos de estimación de Métodos se presenta enTabla.2.7 Método 1. Método 2. Método 3 Inicial Bucles. Método 4 Initial Bucles. Método 5. Numero de multiplicaciones. 33. 25. 9. 48. 10. 66. 66. Numero de sumas Numero de sustracciones. 6. 3. 3. 5. 3. 10. 4. 12. 9. 7. 7. 8. 8. 18. 18. 13. 3. 10. 4. 13. 14. 3. 1. 1. 4. 2. 4. 4. Numero de divisiones Numero de raíces cuadradas. Tabla 2.7. Carga computacional para los Métodos Tal como se puede apreciar, el método 4 finaliza en 6 iteraciones. Se ve que el tiempo de cálculo del Método 4 y el Método 3 son casi 10 ms y de los otros son casi 2 ms. Los tiempos de cálculo del Método 4 y del Método 3 son mayores que los otros. Sin embargo, la estimación de Métodos se realiza en la puesta en marcha del motor y los tiempos de cálculo de todos los métodos están en el rango aceptable. Se recomienda investigar el efecto de datos erróneos que se obtienen de las características del motor que se utilizan para el cálculo de los Métodos del motor y la construcción de la curva de par-velocidad. Los Métodos del motor se estiman a partir de las características de placa y las curvas de velocidad de torsión se trazan de acuerdo con estos parámetros Los Métodos estimados y las curvas de velocidad de torque se muestran en los Anexos. 33.
(44) CAPÍTULO III MÉTODOS DE ESTIMACIÓN DE VELOCIDAD DEL MOTOR 3.1. INTRODUCCIÓN En el mercado de accionamientos industriales, los requisitos relacionados con el control de calidad y costo de manufactura de los accionamientos son importantes Para reducir el costo inicial de estos sistemas de bajo costo, es necesario utilizar microprocesadores de bajo rendimiento. Tal como se conoce el precio del microprocesador es proporcional al desempeño del microprocesador, en motores de bajo costo uno de los objetivos es lograr una precisión de estimación de velocidad con un número mínimo de cálculos.. Las técnicas de estimación de. velocidad dependen de los Métodos del motor. En los motores los Métodos pueden estimarse a partir de los datos del fabricante o medirse. Para llevar a cabo la estimación en línea de parámetros del motor se debe disponer de una carga importante para el microprocesador. Por lo tanto, los motores de bajo costo evitan este Método de estimación en línea y, a menudo, estiman los Métodos del motor utilizando datos suministrados del catálogo técnico del motor. El propósito de esta sección es investigar los métodos de estimación de velocidad en la bibliografía y descubrir que método tiene mayor precisión y es de menor carga computacional. Varios métodos de estimación de velocidad se describen en la bibliografía analizada. El método más común utilizado en la práctica es la linealización de la velocidad de la curva de par velocidad [5] [10]. Este método se explica a continuación y se denominará como Método 3. En este Método se utilizan solo la frecuencia base, la velocidad, la potencia de salida, el número de polos y la resistencia del estator. Estos datos se obtienen a frecuencia base y al par nominal. 34.
(45) Dado que el número de cálculos son muy bajos, este método se puede aplicar en microprocesadores de bajo rendimiento. Este método presenta inconvenientes a altas potencias y cuando el campo magnético se encuentra saturado tal como se explica en el Método 3.. En [10], se indica cuando se aplica este método a un motor de inducción de 3.7 kW cuya resistencia del estator es 0.114, la velocidad se estima con un error del 5% a 20Hz y a plena carga [10]. Otro método de estimación de velocidad, que no requiere Métodos de motor. excepto la resistencia del estator, se basa en una relación no lineal entre la potencia del entrehierro y la velocidad de deslizamiento [6]. Este método se explica a continuación como Método 1. En este método se utilizan la frecuencia base, voltaje, corriente, velocidad, factor de potencia, potencia de salida, número de polos, eficiencia, el par a frecuencia base y la resistencia del estator. Aquí los datos se obtienen a frecuencia base y a par nominal. Cuando este método se aplica a un motor de inducción de 3 hp cuya resistencia del estator es 0.89, en [10] se encuentra que la velocidad es estimada con un error del 1% a 10Hz en condiciones de carga nominal [6]. En este método, en vista que se supone que el par de arranque es constante y se desprecia la resistencia del estator en el cálculo de la velocidad de deslizamiento, este método no es adecuado para altas velocidades y motores pequeños. Así mismo la caída de tensión en la resistencia del estator es comparable a la tensión de entrada a bajo frecuencias cuando se consideran motores de baja potencia, donde se obtendrá una buena precisión de predicción de velocidad. Los Métodos se deben desarrollar teniendo en cuenta la resistencia del estator. Cuando se analizan los métodos en la bibliografía, se observa que cada uno de los métodos tiene ventajas y desventajas. Por lo tanto, se decide investigar el nivel de precisión que se puede esperar de estas técnicas y, posiblemente, desarrollar un enfoque más preciso con carga computacional similar. En este capítulo, tanto los métodos de estimación de velocidad existentes como la propuesta se examinan en motores de inducción de 1,1 kW, 2,2 kW y 4kW. Primero para verificar el modelo de circuito usado, el motor se acciona con voltaje de línea y el par calculado del modelo se compara con el par medido. Con lo que se trata de mostrar la mejor precisión aceptable con este modelo. Dado que los métodos estudiados aquí se deben utilizar en aplicaciones donde la velocidad es controlada, es imprescindible utilizar un 35.
(46) inversor. Muchos métodos requieren la medición de Tensión y corriente. La medición de estas variables afecta la precisión de predicciones Por esa razón, los circuitos de medición de corriente y tensión utilizados son a diferentes frecuencias. A medida que el siguiente paso se investiga la precisión del modelo, los motores de pruebas se accionan a 10Hz, 30Hz, 60Hz y 70Hz. Por lo tanto, idea de la exactitud del modelo utilizado se obtiene para un rango de frecuencia de (10Hz-70Hz). Este problema es investigado en el capítulo 5. En este estudio, la frecuencia media se define entre 20 Hz y 50 Hz. Las frecuencias de más de 50 Hz se denominan de alta frecuencia.. En. este. studio. baja. frecuencia se define como por debajo de 20Hz. Dado que los motores de 1.1kW, 2.2kW y 4 kW están disponibles en laboratorio y la capacidad del inversor no es adecuada para motores más grandes, estos seran los motores se utilizan en los experimentos. En este estudio, el motor de 1.1 kW es nombrado como pequeño. Los motores de 2.2 y 4kW se denominan motores grandes. Cualquier método de predicción de velocidad se basará en el modelo del circuito equivalente. La mejor precisión de predicción se puede esperar cuando se utiliza el modelo exacto. Sin embargo, este traería demasiada carga computacional y requeriría el conocimiento de todos los Métodos Por esta razón, todos los métodos implican algún grado de aproximación. Por lo tanto, es aconsejable comparar la estimación de velocidad de un método con la velocidad estimación del circuito equivalente exacto. Para hacer predicciones realistas, las simulaciones se realizan utilizando valores de tensión actual y medido durante las pruebas. Por lo tanto, cualquier error que pueda ser introducido debido a las mediciones de estas variables se tiene en cuenta en estas predicciones. Para aplicar los Métodos se utiliza el entorno de Matlab. El modelo de Matlab se describe en el capítulo. 4. En las siguientes secciones, se presentan cada uno de los métodos propuestos en la bibliografía analizada y se describen las mejoras propuestas por el autor.. 3.2 MÉTODOS DE ESTIMACIÓN DE VELOCIDAD. 3.2.1 Método 1 En este método, se utiliza el modelo de circuito exacto en estado estable. Este método se basa en una relación no lineal entre la potencia del entrehierro y la velocidad de deslizamiento [6]. En este método se utilizan la frecuencia base, voltaje, corriente, factor de potencia, velocidad, número de polos, eficiencia, 36.
(47) potencia de salida, el par de arranque y la resistencia del estator. Estos datos son obtenidos a frecuencia base y par nominal. Las corrientes instantáneas del estator son medidas en dos fases. Se supone que la tensión de salida del inversor es igual al voltaje de referencia. El método se resume a continuación.. Figura 3.1.. Modelo exacto en estado estacionario del motor de inducción. Se aplica el teorema de Thevenin visto desde el lado del estator y se presenta la ecuación para el cálculo del par.. Donde ws es la velocidad sincrona VTH, RTH y XTH son. El par máximo se calcula con la siguiente ecuación. El deslizamiento a torque máximo es. 37.
(48) Si se desprecia la Resistencia del estator y se divide la ecuación (3.1) entre (3.5), y llevando a cabo las transformaciones necesarias, el torque se puede calcular de la siguiente manera. Al resolver esta ecuación el deslizamiento queda como. Donde SR es el deslizamiento en condiciones de torque nominal y Ko, K y TL son. En la ecuación (3.11), la potencia del entrehierro se calcula restando las perdidas en el cobre del estator las pérdidas en el núcleo del estator de la potencia de entrada. En la aplicación de este método, la ecuación (3.8). muestra una relación no lineal entre la potencia del entre hierro y el deslizamiento. Valores de Ko, TR y sRse hallan a partir de los datos del catálogo del motor. K y TL se calculan a partir de la ecuación (3.10) y(3.11) respectivamente. Finalmente, el deslizamiento se calcula a partir de la ecuación (3.8).. En este método, se supone que Ko es constante. Para satisfacer este supuesto, el flujo de acoplamiento mutuo debe mantenerse constante en el valor nominal. Sin embargo, a altas frecuencias el motor está en la región de campo magnético debilitado y el valor del flujo concatenado mutuo es inferior al valor nominal. Por lo tanto, este método no es adecuado para altas frecuencias.. 38.
(49) En general, la resistencia del estator de los motores pequeños es alta y la caída de voltaje en la resistencia del estator es comparable a la tensión de entrada a bajas frecuencias. Ya que la resistencia el estator se desprecia este método, este no es adecuado para motores pequeños en aplicaciones de bajas frecuencias, Sin embargo, la resistencia del estator es generalmente pequeña y la caída de voltaje en la resistencia del estator puede ser despreciada en motores grandes. Por lo tanto, este método puede ser utilizado para motores grandes a bajas frecuencias.. La validez de las suposiciones a frecuencia media se encuentra en algún punto intermedio entre los casos de frecuencia baja hasta la alta. Tipos adecuados de motores y frecuencias. para este método se muestran en la tabla.3.1.. Tabla 3. 1 Tipos apropiados de motores y frecuencias por el método 1 Se evalúa la carga computacional de este método y se presenta en la tabla 3.2. Tabla 3. 2 Carga computacional del método 1 Evaluando la Tabla 3.2, se puede concluir que, se tiene que utilizar un procesador de alto rendimiento en este método. Dado que este método no requiere ningún Método del motor, excepto la resistencia del estator, este método se puede aplicar fácilmente.. 39.
(50) 3.2.2 Método 2 Este método se propone para mejorar el rendimiento del Método 1 en la región de campo magnético debilitado. La filosofía de este método es la misma que la del Método 1. Se utilizan las siguientes variables: la frecuencia base, el voltaje, corriente, velocidad, factor de potencia, potencia de salida, número de polos, eficiencia, par máximo, resistencia del estator, reactancia de magnetización y del estator y la reactancia de dispersión. Estos datos se obtienen a frecuencia base y par nominal. Las corrientes instantáneas del estator se miden en dos fases. Se supone que la tensión de salida del inversor es igual a la tensión de referencia. Este Método es resumido a continuación. Como se explicó en el Método 1, el valor de Ko está cambiando en la región de campo magnético debilitado. Para mejorar el rendimiento del Método 1, especialmente en la región de campo debilitado, se utiliza el par de máximo calculado de la ecuación (3.13) en lugar de suponer que Ko sea constante. Ko se calcula de la siguiente manera.. Donde Tr es el torque nominal y el troque máximo se calcula de la siguiente forma. En la aplicación de este método, el par máximo se calcula a partir de la ecuación (3.13) donde VTH, RTH y XTH se calculan a partir de la ecuación (3.2), (3.3) y (3.4) respectivamente. Al usar el par máximo calculado, Ko se calcula a partir de la ecuación (3.12) y el resto de los cálculos son iguales como en el Método 1. Se espera que la corrección del valor de Ko mejore el rendimiento de este método de estimación de la velocidad. Este método es 40.
(51) adecuado para motores grandes y pequeños a alta frecuencias Los tipos adecuados de motores y frecuencias para este método se muestran en Tabla.3.3.. Tabla 3. 3 Tipos y frecuencias apropiadas para el método 2. Tabla 3. 4 Calculo de la carga computacional del método 2. En la Tabla 3.3, se tienen los resultados de cálculo de la carga computacional para el para máximo. Sin embargo, el par máximo se calcula solo una vez para cada voltaje y frecuencia. Por lo tanto, se supone que la carga computacional de cálculo del Método 2 es igual a la carga computacional de cálculo del Método 1. Sin embargo, el Método 2 requiere más Métodos del motor. Por esta razón, la aplicación del Método 2 es más lenta que el Método 1. 3.2.3 Método 3 Este método investigado aquí es uno de los métodos más utilizados en aplicaciones de bajo costo. En este método, se asume que la curva de parvelocidad es lineal. El método utiliza solo la velocidad base, la potencia de salida, la frecuencia, la cantidad de polos y la resistencia del estator. Estos datos se obtienen a frecuencia base y a par nominal. Se miden las corrientes y voltajes. Este método se resume a continuación. En [5], la ecuación de torque se escribe como en la ecuación (3.14).. 41.
Figure



+7





Documento similar
Se debe tener en cuenta que lo que se desea no es modelar el motor asincrónico jaula de ardilla, pues el Simulink posee un modelo de alta calidad de esta máquina eléctrica del que
A velocidad de viento por debajo de la velocidad nominal, el voltaje tiende a aumentar debido a que se reduce la producción de potencia eléctrica y se trata de una red débil,
Modelo Terminología Par a rótor parado Par nominal Par de pico a rótor bloqueado Velocidad nominal Corriente a rótor parado Corriente de pico Potencia de cálculo Potencia
Potencia de salida promedio: 2.0KW Potencia de salida máxima: 2.2KW Corriente de salida promedio: 25A POTENCIA: 5.5HP - Frecuencia: 50 Hz Factor de potencia: 1. Salida de tensión
III.- DATOS DE PLACA DEL GENERADOR: POTENCIA NOMINAL: 0.75KW TENSION NOMINAL: 220V/ 380V CORRIENTE NOMINAL: 0.8/ 1.2 A VELOCIDAD NOMINAL: 1500 RPM FRECUENCIA NOMINAL: 50Hz.
A continuación se utilizan los parámetros de la línea en secuencia positiva para realizar el cálculo de corriente, tensión, factor de potencia, regulación y eficiencia en el
Capítulo 4.. Sistema radial simple. Gráfica de la tensión, corriente y potencia de la carga. Características de la tensión y potencia del sistema. Curvas de tensión contra
Estimación de los parámetros fisicos de un motor de corriente directa usando el algoritmo de
