ESCUELA SUPERIOR DE INGENIER´
IA MECANICA Y EL ´
ECTRICA
ANALISIS DE LA TECNOLOG´
IA RFID:
VENTAJAS Y LIMITACIONES
PROYECTO DE INVESTIGACION
QUE PARA OBTENER EL TITULO DE:
INGENIERO EN COMUNICACIONES Y ELECTR ´
ONICA
PRESENTAN:
Verenice Ruiz Palomino
Eduardo Sandoval Fuentes
Director del proyecto: Dr. Roberto Linares y Miranda
JUSTIFICACION
En la actualidad es necesario llevar a cabo el control de las diferentes cosas que nos rodean, por cuestiones monetarias, de organizaci`on, de consumo y mas, sien-do mas dificil encontar una tecnolog`ıa que satisfaga las necesidades crecientes, como ejemplo un a estas necesidades se encuentra el caso de las bibliotecas. Estas ofrecen el servicio de prestamo a domicilio en la mayor`ıa de los casos necesitando un control de prestamo de libros eficiente, si esta biblioteca da abasto a una facultad de miles de alumnos el prestamo y devoluci`on de los libros debe ser agil, aunado a esto lo en-gorroso de los inventarios bibliotecarios y lo tardado que pueden ser.
OBJETIVO
An`alisis de los alcances de operaci`on de la tecnolog`ıa de identificaci`on por radiofrecuencia de 13.56MHz enfocado a los problemas de acoplamiento electro-magn`etico y una propuesta de aplicaci`on para el control bibliotecario.
Objetivos Particulares
Conocerlos principios de operaci`on de la tecnolog`ıa RFID, as`ı como los funda-mentos f`ısicos.
Transferencia de datos por medio del acoplamiento magn`etico de los disposi-tivos de la tecnolog`ıa RFID
RESUMEN
Hoy en dia la tecnolog´ıa de identificaci´on por radiofrecuencia, conocida por sus siglas en ingles como RFID(Radio Frequency Identification) se aplica en el control de inventarios y rastereo de los productos de la cadena de consumo por las grandes tiendas de auteservcio. Esta tecnolog´ıa se est´a expandiendo para identificar y llevar control de cualquier objeto incluyendo al propio ser humano y animales. Sin embar-go, a pesar de la aplicaci´on masiva de la tecnolog´ıa RFID, a´un hacen falta desarrol-los tecnol´ogicos por optmimiarlas o hacerla compatible de acuerdo a desarrol-los procesos de estandarizaci´on existentes.
Este trabajo se enfoca al an´alisis de la tecnolog´ıa RFID, operando en la fre-cuencia de 13.56MHz, por lo que primero se presenta un panorama general de ella y de los procesos f´ısicos b´asicos que se aplican para llevar a cabo el objetivo de identi-ficaci´on de objetos.
Agradecimientos
Agradecemos la elaboraci´on de este trabajo terminal a nuestro asesor Dr. Rober-to Linares y Miranda por su confianza, apoyo y colaboraci´on.
As´ı tambi´en agradecemos a todos los buenos profesores que aportar´on parte de su conocimiento a estos dos alumnos y que ayudaron a forjar a los que alg´un d´ıa lo-grar´an ser llamados ingenieros.
Extendemos nuestro agradecimiento a las familias que nos brindan apoyo, em-puje, la motivaci´on y fe, para continuar con este sue˜no llamado superaci´on de vida.
1.. Introducci´on a la tecnolog´ıa RFID . . . 8
1.1. Evoluci´on de los sistemas con tecnolog´ıa RFID . . . 9
1.2. Sistemas con tecnolog´ıa RFID . . . 11
1.2.1. El transponder . . . 12
1.2.2. Lector . . . 13
1.2.3. Justificaci´on del trabajo . . . 15
1.2.4. Objetivo del trabajo . . . 15
1.2.5. Distribuci´on del trabajo . . . 16
2.. Principios de operaci´on de los sistemas RFID. . . 17
2.1. Procesamiento de comunicaci´on en un solo sentidoHALF DUPLEX o ambos sentidos FULL DUPLEX . . . 17
2.1.1. Acoplamiento Inductivo . . . 18
2.2. Rangos de frecuencia . . . 22
2.3. C´odigos y modulaciones . . . 23
2.3.1. Codificaci´on . . . 24
2.3.2. Modulaci´on . . . 26
3.. Fundamentos f´ısicos de operaci´on de la tecnolog´ıa RFID . . . 30
3.1. Espectro radioel´ectrico . . . 30
3.2. Se˜nal radioel´ectrica . . . 31
3.3. Region de propagaci´on . . . 32
4.. Acoplamiento inductivo . . . 38
4.1. Sistemas de acoplamiento inductivo . . . 38
4.2. Transferencia de forma remota del suministro de energ´ıa . . . 39
4.2.1. Transferencia de energ´ıa . . . 40
4.2.2. Abastecimiento remoto de potencial . . . 43
4.2.3. Factor de acoplamiento . . . 45
4.2.4. Enlace de subida . . . 48
4.2.5. Enlace de bajada . . . 48
5.. Modulaci´on y transferencia de datos de la tecnolog´ıa RFID de 13.56 MHz . . . 50
5.1. Normatividad . . . 50
5.2. Estandar internacional ISO/IEC 14443 . . . 51
5.2.1. ISO 14443-1: Caracter´ısticas f´ısicas . . . 51
5.2.2. ISO 14443-2: Interface de se˜nal y potencia de radiofrecuencia 52 5.2.3. ISO 14443-3:Inicializaci´on y anticolisi´on . . . 57
5.2.4. ISO 14443-4: Protocolo de transmisi´on . . . 66
5.3. An´alisis y comparaci´on de las mediciones con respecto a la norma ISO /IEC 14443 . . . 71
5.3.1. Modulaci´on . . . 72
5.3.2. C´alculo de la tasa promedio de error del sistema . . . 73
6.. Implementaci´on de la tecnolog´ıa RFID en bibliotecas . . . 80
6.1. Consideraciones generales para el proyecto de implementaci´on de RFID en bibliotecas . . . 80
6.1.1. Metodolog´ıa general para el control bibliotecario . . . 80
6.1.2. Identificaci´on de los principales problemas en el control interno de una biblioteca . . . 82
6.2. Descripci´on del equipo de RFID de 13.56 MHz utilizado en pruebas e
implementaci´on . . . 84
6.2.1. Lector / Grabador ACG HF Multi ISO USB . . . 84
6.2.2. Identificaci´on de las terminales de salida del modulo . . . 85
6.2.3. Conjunto de registros . . . 86
6.2.4. Comunicaci´on . . . 87
6.3. Etiquetas Mifare Ultra Delgadas MF0 IC U1 . . . 88
6.3.1. Caracter´ısticas (ISO/IEC 14443 A) . . . 88
6.3.2. Organizaci´on de Memoria EEPROM . . . 88
6.4. Aplicaci´on de la tecnolog´ıa de RFID de 13.56 MHz . . . 89
1.1. Esquema fundamental de un sistema de RFID . . . 11
1.2. Esquema de un transponder de RFID . . . 12
2.1. Representaci´on de Full Duplex y Half Duplex y sistemas de secuencia en el tiempo . . . 18
2.2. Esquema de un acoplamiento inductivo . . . 19
2.3. Modulaci´on por carga con FET . . . 20
2.4. Bandas laterales de la modulaci´on por carga . . . 21
2.5. Circuito b´asico de un transponder con subarm´onicos. Se puede obser-var el reloj dividido en dos . . . 22
2.6. Rangos de frecuencias utilizados para sistemas de RFID . . . 23
2.7. Diagrama a bloques de un sistema de RFID . . . 24
2.8. Diagrama del proceso de modulacion por ASK . . . 27
2.9. Modulaci´on ASK en el dominio del tiempo . . . 28
2.10. Modulaci´on ASK en el dominio de la frecuencia . . . 28
2.11. Distribucion de Frecuencias para la Modulaci´on ASK . . . 29
2.12. Modulaci´on con FSK . . . 29
2.13. Modulaci´on por PSK . . . 29
3.1. En este esquema radio el´ectrico se identifican las bandas de frecuencia de operaci´on de la tecnolog´ıa RFID. . . 30
3.2. Relaci´on de la longitud de onda con la frecuencia . . . 31
3.3. Onda plana o electromagnetica transversal . . . 32
3.5. Regiones de Propagacion de onda electromagn´etica . . . 33
3.6. Sistema B´asico para la transmisi´on de la informaci´on . . . 34
4.1. Fen´omeno de acoplamiento inductivo para la tecnolog´ıa RFID . . . . 39
4.2. Relaci´on de enrg´ıa entre el lector y el transponder . . . 40
4.3. Relaci´on de datos entre el lector y el transponder . . . 41
4.4. Relaci´on de datos entre el el transponder y lector . . . 42
4.5. Circuito pr´actico . . . 42
4.6. Lecturas de campo cercano . . . 43
4.7. Intensidades de campo magn´etico . . . 44
4.8. Segmentaci´on de la bobina . . . 47
5.1. Ejemplo de se˜nales de comunicaci´on PCD-PICC Tipo A y Tipo B . . 53
5.2. Ejemplo de se˜nales de comunicaci´on PCD-PICC Tipo A y Tipo B . . 54
5.3. Secuencias X, Y y Z . . . 55
5.4. Amplitud de modulaci´on de carga . . . 56
5.5. Trama estandar . . . 58
5.6. Diagrama de estados de PICC tipo A . . . 60
5.7. Secuencia de selecci´on . . . 61
5.8. ATQA . . . 62
5.9. Diagrama de bucle de anticolisi´on en cada nivel de cascada . . . 64
5.10. Uso de los niveles de cascada . . . 65
5.11. Protocolo de activaci´on para PICC tipo A . . . 66
5.12. RATS . . . 67
5.13. ATS . . . 68
5.14. Byte de formato . . . 69
5.15. PPS . . . 70
5.16. Se˜nal modulada sin presencia del transponder . . . 73
5.18. Frecuencia de portadora . . . 75
5.19. Probabilidad de error presentada por el lector . . . 76
5.20. Tasa de error promedio presentada por el lector . . . 77
5.21. Probabilidad de error presentada por el lector . . . 78
5.22. Probabilidad de error promedio presentada por el transponder . . . . 79
5.23. Tasa de error promedio presentada por el transponder . . . 79
6.1. Lector ACG HF Multi ISO USB . . . 84
6.2. Lector ACG HF Multi ISO V1.0 . . . 85
6.3. Colocaci´on optima de la etiqueta . . . 89
6.4. Adecuaci´on del lector . . . 90
6.5. Colocaci´on optima de la etiqueta . . . 91
6.6. Etiqueta cubierta con calcoman´ıa . . . 92
6.7. Establecimiento de la comunicaci´on Usuario - Lector . . . 93
6.8. Ventana principal . . . 94
6.9. Inicializaci´on del lector . . . 94
6.10. Registro del n´umero de afiliaci´on . . . 94
1.1. Tecnolog´ıas de identificaci´on autom´atica . . . 9
1.2. transponders pasivos y activos de la tecnolog´ıa RFID . . . 14
2.1. Rangos de frecuencias para sistemas RFID . . . 24
5.1. Diferentes parametros de frecuencias . . . 55
5.2. Tipos de tama˜no para el UID . . . 65
6.1. las ventajas de la tecnolog´ıa RFID . . . 82
6.2. Tipos de etiquetas soportadas por el Lecto ACG HF Multi ISO . . . 85
6.3. Terminales de salida del dispositivo . . . 85
6.4. Organizaci´on de la memoria EEPROM . . . 86
6.5. Se enumera los c´odigos de error del dispositivo . . . 87
6.6. Comando para establecer la comunicaci´on con el dispositivo . . . 87
Identificaci´on por radiofrecuencia (RFID) es un t´ermino gen´erico utilizado para describir un sistema que transmite informaci´on de un objeto o persona a trav´es de energ´ıa electromagn´etica, utilizando como medio el espacio libre. El sistema forma parte del grupo de tecnolog´ıa de identificaci´on autom´atica(Auto-ID), dentro del cual existen otros tipos de tecnolog´ıas tales como el c´odigo de barras, OCR(optical char-acter readers), reconocimiento de voz, tarjetas inteligentes, entre otras. En la tabla
(1) se muestra una las caracter´ıstica de las m´as importantes tecnolog´ıas e identifi-caci´on autom´atica.
La evoluci´on que presenta los sistemas con tecnolog´ıa RFID es evitar que se ten-ga contacto directo con el dispositivo a identificar tal y como se hace con el c´odigo de barras, tambi´en llamadocontactless ID systems. Aparentemente, el c´odigo de bar-ras sigue siendo a´un uno de los sistemas de identificaci´on autom´atica mas eficiente y revolucionario del mercado. Sin embargo, con las demandas actuales de procesos y productos de mayor calidad, ´este queda bastante limitado, a´un cuando es
Par´ametros de C´odigos OCR Reconocimiento Biom´etrica Tarjetas Sitemas
los sistemas de barras de voz Inteligentes RFID
Cantidad t´ıpica 1-100 1-100 ———- ———- 16-64k 16-64k de datos(bytes)
Densidad de datos Baja Baja Alta Alta Muy alta Muy alta Legibilidad de Buena Buena Cara Cara Buena Buena
la m´aquina
Legibilidad Limitada Simple Simple Dif´ıcil Imposible Inaccesible antela gente
Influencia de Falla total Falla total ———- Posible ———- No influye la Cubierta
Influencia por Baja Baja ———- ———- Unidireccional No influye direcci´on /posici´on
Costo de Bajo Bajo Ninguno Ninguno M´edium Ninguno Operaci´on
Rapidez de Baja Baja Muy baja Muy baja Muy baja Muy r´apida lectura 4s 3s ¿5s ¿5-10s ¿4s 0-5ms Distancia max. 0-50cm ¡1cm 0-50cm Contactodirecto Contacto directo 0-5m
entre el lector y el dispositivo
Tab. 1.1: Tecnolog´ıas de identificaci´on autom´atica
momento una tecnolog´ıa de desarrollo cuya limitante depende del ´area de aplicaci´on.
1.1. Evoluci´on de los sistemas con tecnolog´ıa RFID
Fue a principio del siglo XIX cuando se comenz´o a entender verdaderamente el concepto de electromagnetismo. Personajes como Maxwell, Hertz, Marconi, etc, con-tribuyeron con sus inventos y descubrimientos a ello. Posteriormente a principios del
siglo XX la generaci´on y la transmisi´on de ondas de radio y la aparici´on del radar, basado en ondas de radio que rebotan sobre un objeto localiz´andolo, son el fundamen-to sobre el que se constituyen el concepfundamen-to de sistemas de identificaci´on por radiofre-cuencia ´o RFID. Fue en la d´ecada de los 50 cuando la tecnolog´ıa de RFID sigui´o un proceso de desarrollo similar al que experimentaron la radio y el radar en las d´ecadas anteriores. Diferentes sectores de la tecnolog´ıa RFID se vieron impulsados, entre ellos los sistemas con transponders de largo alcance, especialmente los conocidos como
identification, friend or foe (IFF) usado en la industria aeron´autica. Trabajos como los creados por F.L Vernon Application of microwave homodyne y por D.B. Harris
El sistema era sencillo con un ´unico bit de informaci´on, para detectar la etiqueta o no, dentro del radio de acci´on del lector y hacer sonar una alarma ac´ustica en caso de
que una etiqueta no desactivada pasase por el alcance del lector. En los 70 se produ-jeron notables avances como los aportados por instituciones comoLos Alamos Scien-tific Laboratory, Northwestern University y el Microwave Institute Foundation sueca. Al principio de esta d´ecada se probaron varias aplicaciones para log´ıstica y transporte, como las usadas por el puerto de New York y New Yersey. Estudio, dise˜no y simu-laci´on de un sistema RFID basado en EPC para el rastreo de autom´oviles. Pero las aplicaciones en el sector log´ıstico todav´ıa no estaban listas para una inserci´on comple-ta en el mercado. En escomple-ta d´ecada hubo un gran desarrollo t´ecnico de los sistemas, so-bretodo enfocado a aplicaciones de seguimiento de ganado, veh´ıculos y automatizaci´on
industrial. Basados en microondas en los EEUU y sistemas inductivos en Europa. En los primeros a˜nos de los 90 se inici´o el uso en EEUU del peaje con control electr´onico, autopistas deHouston y Oklahoma incorporaban un sistema que gestion-aba el paso de los veh´ıculos por los pasos de control. En Europa tambi´en se inves-tig´o este campo y se usaron sistemas de microondas e inductivos para controles de accesos y billetes electr´onicos. Un nuevo avance en el mundo del autom´ovil vino con la tecnolog´ıa RFID de la mano de Texas Instruments (TI), un sistema de control de encendido del autom´ovil. Apareci´o tambi´en un sistema de Philips que permit´ıa la
1.2. Sistemas con tecnolog´ıa RFID
Los sistemas de la tecnolog´ıa RFID se componen de dos elementos principales: un lector o interrogador, que puede ser lector-grabador o s´olo lector y una etique-ta (tag o transponder), que puede ser de lectura o lectura-escritura. El transponder
presenta una serie de caracter´ısticas f´ısicas, de programaci´on, de escritura y de al-cance, que dependen de su aplicaci´on. Este es un el portador de datos (data-carrying de- vice) del sistema con tecnolog´ıa RFID, consiste de un elemento de acoplamien-to de radiofrecuencia y unmicrochip, dentro del cual se almacena la informaci´on de-seada. El lector se constituye de varios elementos que son fundamentales para su op-eraci´on, los cuales son: m´odulo de radiofrecuencia (transmisor y receptor) y su el-emento de acoplamiento, y unidad de control. Algunos lectores cuentan con inter-faces adicionales(RS232, RS485, etc) con el prop´osito de permitir transferir los datos recibidos a otro sistema(PC, robot, sistema de control, etc). En la figura (1.1)
mues-tra un esquema fundamental de un sistema con tecnolog´ıa RFID, donde se puede ob-servar que el lado izquierdo corresponde al lector en conjunto con una unidad de con-trol PC y que el lado derecho es el transponder con su elemento de acoplamiento
Fig. 1.1:Esquema fundamental de un sistema de RFID
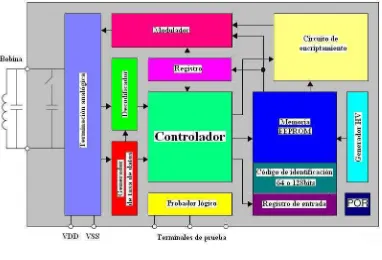
1.2.1. El transponder
El transponder (o etiqueta) es el dispositivo que contiene los datos a identificar y esta compuesto principalmente por los siguientes elementos:
Memoria no vol´atil donde se almacenan los datos.
MemoraROM donde se almacenan instrucciones b´asicas para el funcionamien-to, como son temporizadores, controles de flujo de datos, etc.
Memoria RAM para almacenar datos duarante la comunicaci´on con el lector. Esta puede ser opcional dependiendo de la aplicaci´on.
Antena para detectar el campo creado por el lector y del cual extrae energ´ıa para su comunicaci´on con el.
Los componentes electr´onicos que son los encargados del procesamiento de la se˜nal de antena y de los datos, estos componentes pueden ser filtros, buffers u otros.
[image:17.595.208.399.465.595.2]El esquema de un transponder se muestra en la figura (1.2)
Tipos de transponder (etiquetas)
Dentro de los sistemas RFID existen dos tipos de transponders, los cuales se caracterizan dependiendo de la forma en la cual obtienen la energ´ıa necesaria para realizar la comunicaci´on con el lector. Estos pueden ser activos o pasivos.
Activo:
Son transponders que necesitan el apoyo de bater´ıas adicionales, ya que no cuentan con la suficiente energ´ıa para transmitir la informaci´on hacia el lector. Este tipo de
transponder tiene la ventaja de poseer un alcance mayor de comunicaci´on e incluso no necesitan que el lector sea qui´en inicie la comunicaci´on. Adem´as permiten habitual-mente procesos de lectura y reescritura enviando previahabitual-mente instrucciones al lector y la utilizaci´on de memorias m´as grandes (existen transponders con 1Mb de memo-ria). Por lo que tiene una vida ´util limitada (aproximadamente cuatro a˜nos), depen-diendo del tipo de bater´ıa y de las temperaturas a las que opera. Tambi´en hay que
destacar que su coste es bastante elevado.
Pasivo:
Son transponders que no necesitan bater´ıas adicionales, ´unicamente se alimentan de la energ´ıa del campo generado por el lector. La energ´ıa que necesitan para transmi-tir la informaci´on que contienen, proviene en su totalidad de la se˜nal generada por el lector, la cual se aprovechan la se˜nal que envia a el lector.
En la tabla (1.2.1)se muestra las caracter´ısticas de los dos tipos de transpon-derde la tecnolog´ıa RFID
1.2.2. Lector
fab-Concepto Etiquetas activas Etiquetas pasivas
Fuente de Bater´ıa interna Energ´ıa transferida energ´ıa de directamente del la etiqueta lector
Disponible de Energ´ıa continua Unicamente al´ energ´ıa en proporcionada por estar dentro del la etiqueta la bater´ıa interna campo de energ´ıa
del lector Potencia de Baja, debido a Alta debido a la la se˜nal del la energ´ıa transferncia de lector a la interna de la energ´ıa que propor-etiqueta etiqueta ciona a la etiqueta Rango de De 20 a 100 Seis metros o menos. comunicaci´on de metros m´as. Sujeto Sujeto a cambios las etiquetas a cambios dependiendo dependiendo del
del fabricante. fabricante. Velocidad de Alta Baja lectura por
parte del lector
Capacidad de Alta Baja almacenamiento de
datos (lectura-escritura)
Dimensiones var´ıa dependiendo Var´ıa dependiendo del fabricante. M´as del fabricante. grande que el pasivo Son peque˜nas, debido a la bater´ıa aprox. 0.8mm interna de di´ametro. Tiempo Limitada por la Aproximadamente de de vida ´util de la 10 a˜nos. Dependiendo vida bater´ıa en gran medida de las
condiciones de uso. Costo (Dls) $ 10 –$ 50 $ 0.20 – $ 10.05 Temperatura −10 a 50
o
C −40 a 70 o
C Frecuencias 132KHz, 433MHz, 125KHz, 135KHz, comunes de 2.4GHz, 5.8GHz 13.56MHz,915MHz, funcionamiento 2.45GHz
Tipo de Lectura y Puede ser de
transponders escritura lectura ´o de lectura/escritura Memoria SRAM EEPROM/FRAM utilizada 1–512Kbytes 16Bytes –32Kbytes Ciclos Limitada depende 100,000
de de la vida ´util a lectura de la bater´ıa 1,000,000
Direccionamiento La radeaci´on del Eltranspondersdebe del transponderses ser de manera
transponders continua y omnidireccional eficiente orientado hacia la antena por lo que no es necesaria de manera recta hacia
una orientaci´on precisa para el lector para establecer la comunicaci´on con el elctor una comunicaci´on
Tab. 1.2: transponders pasivos y activos de la tecnolog´ıa RFID
ricarse en dos tipos:
Sistemas interrogadores con bobinas simples:
Este lector solo cuenta con una bobina con la cual transmite la energ´ıa y los datos. Estos suelen ser m´as simples y baratos, pero su alcance se ve reducido.
Sistemas interrogadores con dos bobinas:
Este lector se compone por dos bobinas, una para enviar energ´ıa y la otra para trans-mitir los datos. Debido a que son m´as sofisticados, su costo es mayor que los lectores de una bobina.
caracter´ısti-cas del transponder y si son sofisticados, los componentes del interrogador deben de ser capaces de acondicionar las se˜nales, detectar y corregir errores. Adem´as algunos
pueden llegar a trabajar m´as de una frecuencia. Una vez que se ha recibido toda la informaci´on por parte del lector, se pueden emplear algoritmos para no confundir la transmisi´on actual con una nueva, indic´andole altransponder que deje de transmitir. Otro algoritmo usado por el lector, es ir llamando a los transponder por su n´umero de identificaci´on, indic´andole de esta forma el tiempo en el que deben transmitir. Es-tos mecanismos impiden la colisi´on de informaci´on.
1.2.3. Justificaci´on del trabajo
Los sistemas de la tecnolog´ıa RFID de 13.56 MHz han alcanzado un gran popu-laridad en aplicaciones como: tarjetas de cr´edito, acceso de control, pasaportes, con-trol de productos y otros. La caracter´ıstica de operaci´on de dicho sistema es de cor-to alcance (2−10cm), el cual se presta como un reto constante a vencer. Por la dis-tancia de transferencia de datos, su operaci´on se basa en el proceso de acoplamiento
electromagn´etico y su desempe˜no depende de los elementos que se utilizan que son inductores. A pesar que los principios f´ısicos de los inductores es bien conocido y sus caracter´ısticas son f´acilmente de determinar, son altamente vulnerables al medio y al ambiente que los rodea. En este sentido el desempe˜no de la tecnolog´ıa RFID a´un no esta optimizada, por lo que en este trabajo de investigaci´on se analizaran sus venta-jas y sus limitaciones haciendo ´enfasis en la norma ISO 14443, a la cual se apega la evaluaci´on de conformidad de este tipo de sistemas, planteando el objetivo que a con-tinuaci´on se especifica.
1.2.4. Objetivo del trabajo
An´alisis de los alcances de operaci´on de la tecnolog´ıa de identificaci´on por radiofrecuencia de 13.56 MHz, enfocado a los problemas de acoplamiento
Presentar las ventajas de la tecnolog´ıa RFID a 13.56 MHz en base a la norma ISO 14443 y comprobar su desempe˜no con un sistema de evaluaci´on.
Presentar las limitaciones de la tecnolog´ıa RFID a 13.56 MHz analizando el fen´omeno electromagn´etico en el cual se basa la transferencia de informaci´on.
1.2.5. Distribuci´on del trabajo
Para alcanzar los objetivos propuestos, este trabajo de investigaci´on se desglosa en cinco cap´ıtulos, empezando por la introducci´on que es el presente cap´ıtulo. En el segundo cap´ıtulo se presentan los principios b´asicos de operaci´on de los sistemas de la tecnolog´ıa RFID con el fin de tener un panorama global de todos procesos que inter-vienen en el funcionamiento de estos sistemas. El tercer cap´ıtulo se enfoca a los funda-mentos f´ısicos que identifican esta tecnolog´ıa como de radiofrecuencia, el porque para su operaci´on utiliza el acoplamiento electromagn´etico y la frecuencia de 13.56 MHz. En el cuarto cap´ıtulo se describe el proceso del acoplamiento electromagn´etico y sus efectos para alcanzar un sistema de alto desempe˜no. En un proceso de comunicaci´on
TEMAS RFID
Los sistemas de la tecnolog´ıa RFID se pueden clasificar de acuerdo a varios cri-terios, como pueden ser: la frecuencia a la que trabajan (LF, HF, UHF o microondas), la alimentaci´on de los transponders (activos o pasivos) o seg´un el principio de funcio-namiento en el que se basan (acoplamiento inductivo, retrodispersi´on o microondas). Tambi´en, como todo proceso de radiocomunicaci´on, la tecnolog´ıa RFID requiere de un proceso de modulaci´on que consiste en variar la portadora de la informaci´on en: amplitud, frecuencia o fase, para el caso especifico las modulaciones aplicadas a dicha
tecnolog´ıa son: ASK (amplitude shift keying ), FSK (frequency shift keying ) y PSK (phase shift keying). Para el caso especifico de este trabajo de investigaci´on, la tec-nolog´ıa RFID corresponde a la HF, con acoplamiento inductivo y modulaci´on ASK.
2.1. Procesamiento de comunicaci´on en un solo sentido
HALF
DU-PLEX
o ambos sentidos
FULL DUPLEX
A diferencia de los sistemas de 1 bit en el transponder , guardado por efectos
f´ısicos, este tipo de sistemas utilizan un microchip electr´onico como dispositivo por-tador de la informaci´on, el cual consta de una capacidad de almacenamiento de datos de unos cuantos kbytes. Para poder leer o escribir en dicho dispositivo es necesario establecer una comunicaci´on entre el lector y el dispositivo, esta puede llevarse a cabo por medio de transmisi´on por HALF DUPLEX(HDX) oFULL DUPLEX(FDX).
subporta-dora. Para Full Duplex (FDX) el dato transferido desde el transponder al lector se efect´ua simult´aneamente a la transmisi´on del dato del lector al transponder.
Fig. 2.1:Representaci´on de Full Duplex y Half Duplex y sistemas de secuencia en el tiempo
En el caso de los sistemas secuenciales tenemos la transferencia de energ´ıa en un periodo limitado de tiempo, mientras que la transferencia de datos desde el transpon-der al lector ocurre en las pausas producidas por el lector.En la figura (2.1)se pueden observar las representaciones de los diferentes modos de transmisi´on.
2.1.1. Acoplamiento Inductivo
Un acoplamiento del tipo inductivo implica un transponder; comprendido por un microchip y un ´area grande de bobina, la cual funge de antena. Los transponders
con acoplamiento inductivo generalmente son del tipo pasivo, recibiendo la energ´ıa para su funcionamiento por parte del lector.
Suministro de energ´ıa hacia el transponder pasivo
Para lograr la comunicaci´on entre el lector y el transponder, el lector genera un campo magn´etico a altas frecuencias para que este penetre a trav´es del ´area de la
Esta inducci´on en la bobina del transponder genera un voltaje Vi, este es recti-ficado y entregado como alimentaci´on almicrochip.
Un capacitor Cr es conectado en paralelo con la antena del lector para formar un circuito resonante en paralelo a la frecuencia del lector.
De manera similar, el lector contiene un circuito resonante capaz de generar cor-rientes bastante altas en la antena a la frecuencia de trabajo para generar el campo magn´etico requerido para el transponder remoto.
En la figura (2.2) podemos observar un esquema del acoplamiento inductivo. En la frecuencia de resonancia, el campo creado al rededor de la antena es la energ´ıa de la que se sirve el transponder para llevar acabo la comunicaci´on con el lector, por lo que la potencia irradiada por la antena del lector se elevar´a considerablemente en la
busqueda de un mayor alcance.
Fig. 2.2:Esquema de un acoplamiento inductivo
Para la frecuencia de 13.56 MHz las antenas del sistema son bobinas de gran tama˜no debido a que la longitud de onda (λ) es elevada (22.4m). Dado que la
Transferencia de datos entre el transponder y el lector
La transferencia de datos se puede llevar acabo por diferentes tipos de modu-laci´on:
Modulaci´on por carga:
Consideremos a los sistemas inductivo equiparables en funcionamiento al acoplamien-to de transformadores, para lo cual la antena del lecacoplamien-tor funge como devanado
pri-mario, mientras que la deltransponder como devanado secundario. Esto es considera-do como cierto mientras que la distancia entre bobinas (antenas) no exceda de 0.6 λ. Si el transponder se encuentra dentro del campo magn´etico creado por el lec-tor, ´este tomar´a la energ´ıa para lograr la activaci´on y poder responder al lector. Es-ta respuesEs-ta se puede represenEs-tar en la antena del lector como una impedancia(ZT). Al conectar y desconectar la resistencia de carga presente en la antena del
transponder, se consigue variar el valor de (ZT) provocando que el voltaje existente en la antena del lector var´ıe, creando una modulaci´on por amplitud y poder de esta
forma interpretar los datos enviados por eltransponder de manera remota.
El tiempo de conexi´on y desconexi´on de la carga en el transponder esta dado por los datos.
Fig. 2.3: Modulaci´on por carga con FET
Modulaci´on por carga con subportadora:
lector y lo que este pueda recibir del transponder es considerable (aproximadamente de 10,000), por lo que para recibir la se˜nal proveniente deltransponder se requiere de
una circuiter´ıa mas compleja y costosa. Ante esta situaci´on se opta por hacer uso de las bandas continuas a la modulaci´on creada. Para ello, se incorpora una carga que se conecta y desconecta a una alta frecuencia, por lo tanto dos l´ıneas espectrales son creadas a una distancia de la frecuencia de resonancia entre el lector y el transpon-der. Un posible m´etodo es usar un transistor FET en el transponder como se mues-tra en la figura (2.3). Una generaci´on de modulaci´on por carga en el transponder a trav´es de una comunicaci´on entre drenaje y fuente de un FET.
Debido al gran ancho de banda requerido para la transmisi´on con subportado-ra, este tipo de modulaci´on solo puede ser utilizado para las frecuencias de 6.78 MHz,
13.56 MHz y 27.125 MHz, pertenecientes al rango de frecuencias ISM (Industrial -Science - Medical).
En la figura (2.4)se muestran las dos bandas laterales de la modulaci´on por car-ga, estas bandas se encuentran a una distancia de la subportadora de resonancia en-tre el lector y el transponder. Por lo que la informaci´on actual es portada en las ban-das laterales.
Subarm´onicos:
El funcionamiento para este tipo de modulaci´on se basa en el uso de subarm´onicos de
una frecuencia, se suele utilizar el primer arm´onico, es decir la mitad de la frecuencia con la que irradia el lector. Por lo que eltransponder necesitar´a un divisor binario de frecuencias para responder al lector. La frecuencia de operaci´on m´as usada para los sis-temas subarm´onicos es 128 KHz, por lo que la respuesta deltransponder es de 64 KHz. A continuaci´on en en la figura (2.5) se puede observar el dise˜no de un transpon-der dise˜nado especif´ıcamente para la utilizaci´on de subarm´onicos.
Fig. 2.5:Circuito b´asico de un transponder con subarm´onicos. Se puede observar el reloj dividido en dos
2.2. Rangos de frecuencia
El hecho de que los sistemas de RFID generen e irradien ondas electromagn´eticas implica que ´estos sean clasificados como sistemas de radio, por tal motivo el
funcio-namiento de otros sistemas de radio no debe verse interrumpido o perjudicado por las ondas emitidas por un sistema de identificaci´on por radiofrecuencia.
investigaciones industriales, cient´ıficas y medicas , las llamadas ISM (Industrial Scientific -Medical), ver Figura (2.6).
Fig. 2.6:Rangos de frecuencias utilizados para sistemas de RFID
En la tabla (2.2) se muestran los distintos rangos de frecuencias as´ı como su aplicaci´on y principales caracter´ısticas para distintos sistemas de RFID.
2.3. C´odigos y modulaciones
La transferencia de datos entre el transponder y el lector se puede resumir en
tres bloques principales de funcionamiento, v´ease figura (2.7):
En el lector: Se da la modulaci´on de la se˜nal y la codificaci´on.
En el medio de transmisi´on: la se˜nal se transporta con un cierto deterioro.
Rango de frecuencia Observaciones Intensidad de campo
(Potencia de TX) ¡135Hz Baja potencia. 72dBµA/m
Acoplamiento inductivo
6.765 a Media fecuencia (ISM), 72dBµA/m
6.795 MHz acoplamiento inductivo
7.400 a Media frecuencia usada 9dBµA/m 8.800 MHz s´olo para EAS
13.556 a Media frecuencia (13.56MHz 42dBµA/M
13.567 MHz ISM), acoplamiento inductivo ISO 14443, 15693, 18000-3)
MIFARE, LOGIC.
26.957 a Media frecuencia (ISM), 42 dbµA/m 27.283 MHz acoplamiento inductivo, s´olo
aplicaciones especiales
433 MHz UHF(ISM), acoplamiento por 10 a 100mW backscatter, raramente usado
por RFID
868 a UHF(SRD), acoplamiento por 500 mW 870 MHz backscatter, nueva s´olo
frecuencia, sistema bajo Europa desarrollo.
902 a UHF(SRD), acoplamiento por 4W s´olo 928MHz backscatter, varios sistemas USA/Canad´a
2.400 a SHF(ISM), acoplamiento por 4W S´olo 2.483 GHz backscatter, varios USA/Canad´a
sistemas(identificaci´on de 500mW veh´ıculos)2.446 a 2.454GHZ Europa 5.725 a SHF(ISM), acoplamiento por 4W S´olo 5.875 GHz backscatter, raramente USA/Canad´a
usado para RFID 500mW Europa
Tab. 2.1: Rangos de frecuencias para sistemas RFID
Como se muestra en la figura (2.7), un sistema de RFID se asemeja a un
sis-tema digital, por lo que los m´etodos de codificaci´on y modulaci´on utilizados para es-tos sistemas pueden ser aplicados a los sistemas de RFID.
2.3.1. Codificaci´on
Existe una gran variedad de codificaciones, de las cuales las m´as utilizadas para los sistemas de RFID son:
C´odigo NRZ (No Return Zero):
Un 1 binario es representado para una se˜nal alta y un 0 binario para una se˜nal
ja. La se˜nal aparece en el nivel de binario asignado a ella por el tiempo de bit com-pleto. La codificaci´on NRZ se usa con una modulaci´on FSK o PSK.
El m´etodo NRZ por lo com´un se genera en sistemas de baja velocidad cuan-do se usa transmisi´on as´ıncrona. No es muy usada para los sistemas s´ıncronos dacuan-do la falta de cambios de nivel de voltaje cuando hay una larga sucesi´on secuencial de
0 de los 1 binarios. Si no hay cambio en la se˜nal, es dif´ıcil para el receptor determi-nar cuando termina un bit y da comienzo el siguiente. Para transmisiones s´ıncronas de NRZ por lo general se convierten en otro formato, como RZ o Manchester.
NRZ Unipolar: Es una variante de c´odigo no retorno a cero, en este los niveles l´ogicos son de 0 para el 0 l´ogico y de +5 para el 1 l´ogico. Esta asignaci´on de valor se dan por el tiempo completo de bit, en otras palabras, el voltaje no regresa a
0 durante el intervalo del 1 binario.
NRZ Bipolar: Al igual que la anterior forma parte de los no retorno a cero, presentando dos polaridades para su funcionamiento, positivo y negativo, los voltajes son de +12V y -12V. Donde el valor del1 binario ser´a asignado a los voltajes nega-tivos y para 0 los voltajes positivos.
C´odigo Manchester:
Tambi´en llamada codificaci´on bifase. En este sistema un1binario se transmite primero como pulso positivo, por la mitad del periodo de bit, y como un pulso negativo la
mi-tad restante del periodo de bit. Para un0 binario es representado por una transici´on positiva, es decir, primero ser´a un pulso negativo por la primer mitad del periodo del bit, y pasando a un pulso negativo para la segunda mitad del periodo de bit.
C´odigo retorno a cero(RZ)
Este se refiere al regreso a cero despu´es de haber indicado un1 binario o un 0. Puede ser unipolar o bipolar.
Retorno a cero unipolar: Un 1 binario es representado por una se˜nal alta
durante la primera mitad del periodo del bit mientras que un0 binario por una se˜nal
Retorno a cero bipolar: Durante 1 binario se le asignara la polaridad pos-itiva, al igual que el unipolar este solo tendr´a una duraci´on de la mitad del periodo
de bit, para el 0 binario se transmite una se˜nal de voltaje negativo por la mitad del periodo de bit y este regresara al voltaje de referencia (0V).
C´odigo (DBP):
Un 1binario es codificado con una ausencia de transici´on, para un 0 binario es cod-ificado por una transici´on de cualquier tipo, en mitad de periodo de bit. Adem´as, el nivel es invertido al inicio de cada periodo de bit de modo que el pulso pueda ser re-construido de manera sencilla en el receptor.
C´odigo Miller:
Un 1binario es representado por una transici´on de cualquier tipo en la mitad de
pe-riodo de bit, mientras que un 0 binario es representado con la continuidad del nivel de la se˜nal hasta el pr´oximo periodo de bit. Una secuencia de ceros crea una transi-ci´on al principio de cada periodo de bit de modo que el pulso pueda ser reconstruido de manera sencilla en el receptor si es necesario.
2.3.2. Modulaci´on
La modulaci´on cl´asica de radiofrecuencia esta fuertemente ligada a los m´eto-dos anal´ogicos de la modulaci´on. Una onda electromagn´etica puede ser modificada por cualquiera de sus tres variables: amplitud, frecuencia y fase, de las cuales sur-gen los tres tipos de modulaciones digitales b´asicas para radiofrecuencia, ASK (am-plitude shift keying), FSK(frequency shift keying) y PSK (phase shift keying). A con-tinuaci´on se da un breve recordatorio de cada una de las modulaciones:
ASK (amplitude shift keying):
se representa mediante la ausencia de la se˜nal portadora. En este caso la se˜nal mod-uladora vale
V m(t) = (
[image:32.595.169.460.171.376.2]1 para un 1 binario 0 para un 0 binario
Fig. 2.8:Diagrama del proceso de modulacion por ASK
Mientras que le valor de la se˜nal de transmisi´on (se˜nal portadora) es dado por
vp(t) = V psen(2πf ct)
Donde Vp es el valor pico de la se˜nal y fc es la frecuencia de la se˜nal.
Como es una modulaci´on de amplitud, la se˜nal modulada tiene la siguiente ex-presi´on
v(t) = V pvm(t)sen(2πf pt)
Como se vi´o, la se˜nal moduladora vm(t) al ser una se˜nal digital toma ´ unica-mente los valores 0 y 1, con lo cual la se˜nal modulada resulta de
V(t) = (
Fig. 2.9: Modulaci´on ASK en el dominio del tiempo
La se˜nal modulada puede representarse gr´aficamente de la siguiente manera co-mo se muestra en la figura (2.8).
Debido a que la se˜nal moduladora es una secuencia peri´odica de pulsos, su es-pectro de frecuencias obtenido por medio del desarrollo en serie compleja de Fouri-er tiene la caractFouri-er´ıstica de la funci´onsampling, v´ease figura(2.9) para el dominio del
tiempo y la figura(2.10)para el dominio de la frecuencia.
Fig. 2.10: Modulaci´on ASK en el dominio de la frecuencia
Este caso es similar a la modulaci´on de amplitud para se˜nales anal´ogicas es decir, produce un desplazamiento de frecuencias, trasladando todo el espectro de frecuencias
representativo de la secuencia de pulsos peri´odicos. Como se aprecia en la figura(2.11)
Fig. 2.11: Distribucion de Frecuencias para la Modulaci´on ASK
KHz (f2), estas dos frecuencias se transmiten con alternancia para crear los datos bi-narios seriales.
Fig. 2.12: Modulaci´on con FSK
PSK (phase shift keying): En PSK la se˜nal binaria que se transmite cam-biar´a de fase, dependiendo si el dato que se transmite es un 0 binario ´o un 1 bina-rio. Recordando que un corrimiento de fase es una diferencia en tiempo entre dos on-das senoidales de la misma frecuencia.
ERACI ´
ON DE LA TECNOLOG´IA RFID
[image:35.595.108.528.341.553.2]En este cap´ıtulo se presentan los fundamentos f´ısicos en los cuales se basa la tecnolog´ıa de identificaci´on por radiofrecuencias. Se empieza describiendo el espectro radioel´ectrico y las bandas de frecuencia donde opera esta tecnolog´ıa y posteriormen-te se presenta el concepto de la se˜nal radioel´ectrica en la cual viaja la informaci´on del objeto identificado o por identificar, as´ı como las regiones las que se propaga la se˜nal radioel´ectrica y la selecci´on de la tecnolog´ıa de acuerdo a la frecuencia de operaci´on.
Fig. 3.1:En este esquema radio el´ectrico se identifican las bandas de frecuencia de operaci´on de la tecnolog´ıa RFID.
3.1. Espectro radioel´ectrico
del objeto a identificar. En la figura (3.1) se muestra un esquema del espectro ra-dioel´ectrico.
La tecnolog´ıa RFID opera en las bandas de frecuencias bajas (LF), altas (HF), ultra altas (UHF) y s´uper altas (SF). Las longitudes de onda para las frecuencias ba-jas y altas son del orden de metros y para las frecuencias ultra y s´uper altas, las lon-gitudes de onda son del orden de cent´ımetros. Un esquema de la relaci´on de longitud de onda con la frecuencia se muestra en Figura (3.2)
Fig. 3.2: Relaci´on de la longitud de onda con la frecuencia
3.2. Se˜
nal radioel´ectrica
La onda electromagn´etica est´a compuesta por un campo el´ectrico (E) y un
cam-po magn´etico (H). Su propagaci´on depende de la frecuencia y de las caracter´ısticas el´ectricas del medio, cuyo par´ametro importante es la impedancia, que es la relaci´on entre los campos mencionados.
La referencia de propagaci´on es el espacio libre que tiene una impedancia igual a
η0 = [E/H] = 120[Ω]≈377[Ω]
En la regi´on del espacio libre el campo el´ectrico viaja transversal al campo
Fig. 3.3: Onda plana o electromagnetica transversal
En la Figura (3.4) se muestra la relaci´on de la impedancia respecto a la onda plana para la regi´on de campo cercano reactivo y campo lejano.
Fig. 3.4: Relaci´on de la impedancia respecto a la onda plana
3.3. Region de propagaci´on
Como en el mundo real no todo es especio libre, se tienen definidas tres regiones donde pueden propagarse los campos electromagn´eticos:
por lo que la transmisi´on se presenta como acoplamiento electromagn´etico.
Regi´on de campo cercano radiado. Despu´es de la regi´on de campo cercano re-activo las ondas electromagn´eticas empiezan a radiarse generado c´ırculos
cerra-dos alrededor del elemento que genera el campo que es conocido como elemen-to radiador o antena. A esta regi´on tambi´en se le conoce como zona de Fresnel.
Regi´on de campo lejano radiado. Esta regi´on corresponde al espacio libre y es la referencia para analizar los fen´omenos de propagaci´on de ondas electro-magn´eticas.
[image:38.595.133.490.323.540.2]Un esquema que ilustra las regiones de propagaci´on de los campos electro-magn´eticos se muestra en la figura (3.5)
Fig. 3.5: Regiones de Propagacion de onda electromagn´etica
Para transmitir informaci´on por medio de ondas electromagn´eticas se requiere
Fig. 3.6: Sistema B´asico para la transmisi´on de la informaci´on
Para que la transmisi´on de informaci´on tenga ´exito, los sistemas deben traba-jar a la misma frecuencia. Para la propagaci´on de ondas en el espacio libre, las di-mensiones de las antenas se especifican normalmente en fracciones de longitudes de onda (longitud el´ectrica), el valor t´ıpico es media longitud de onda (λ/2) o un cuar-to de longitud de onda (λ/4). De acuerdo con esta consideraci´on, la tecnolog´ıa RFID
que opera en la banda de LF, (125 KHz) tiene una longitud de onda de 2400m
(λ = 3∗108
/125∗103
), entonces la antena que debe utilizarse para la transmisi´on de onda plana, debe ser de 1200m para λ/2o600m para λ/4. Las antenas tienen di-mensiones desproporcionadas para la aplicaci´on de la tecnolog´ıa de identificaci´on por radiofrecuencia. Estas frecuencia se pueden utilizar si los sistemas operan bajo el es-quema de campo cercano donde se presenta el fen´omeno de acoplamiento electro-magn´etico, teniendo distancias de cent´ımetros entre el transmisor-receptor. As´ı mis-mo, la tecnolog´ıa de RFID que opera en la banda de HF, que tiene una longitud de on-da de 22,123m, tambi´en funciona bajo el fen´omeno de acoplamiento electromagn´etico.
Para la frecuencia de operaci´on de la tecnolog´ıa RFID en la banda de UHF de 433 MHz la longitud de onda esλ = 0,692m y para 915 MHz la longitud de onda es
λ = 0,33m ; para la banda de SHF de 2.45 GHz la longitud de onda es λ = 0,122m
Un problema que se presenta en la regi´on de campo lejano es la atenuaci´on. Las ondas de radio pueden verse afectadas por el material a trav´es del cual se
pro-pagan. Cuando un material permite que las ondas de radio, de una cierta frecuencia, pasen sin presentar p´erdidas substanciales de energ´ıa cuando viajan a trav´es de ´el, se le conoce como material-transparente o amigable con la radio frecuencia.
Cuando un material bloquea, refleja o dispersa las ondas de radio frecuencia, a ´este se le conoce como material opaco a la radio frecuencia. Si el material permite que las ondas de radio se propaguen a trav´es de ´el pero que se presenten p´erdidas sub-stanciales de energ´ıa se le llama material absorbente de radio frecuencia. Este tipo de materiales y los que son catalogados como opacos, son materiales de propiedades relativas porque dependen de la frecuencia. Esto es, un material que es opaco a
cier-to intervalo de frecuencias, puede ser transparente a otras frecuencias.
Adem´as de ser influenciadas por los materiales por d´onde se propagan, las ondas de radio tambi´en son susceptibles a perturbaciones e interferencias por varios tipos de fen´omenos f´ısicos y fuentes tales como
Condiciones clim´aticas tales como: neblina, lluvia y otros tipos de precipitaci´on.
La presencia de otras ondas de radio tales como tel´efonos celulares, radios m´oviles, etc.
Descargas electrost´aticas (ESD). Estas son corrientes el´ectricas repentinas que fluyen a trav´es de un material que es un aislante bajo condiciones normales.
3.4. Selecci´on de la frecuencia de operaci´on
la optimizaci´on de operaci´on del sistemas se da para la relaci´on del tama˜no de la an-tena con la distancia de transmisi´on de informaci´on. Desde luego el tama˜no de la
an-tena est´a relacionada con el tama˜no del transponder. La relaci´on distancia tama˜no de la antena se da para dos caso: Primero:Smax ≪D, dondeSmaxes el tama˜no m´aximo de la antena del transponder y es la distancia entre el transponder y el interrogador. Segundo:D ≪ smin, donde Smin es el tama˜no m´ınimo de la antena del transponder Este proceso se presenta como un concepto nuevo reconoci´endolo como selectividad especial, la cual se puede definir como la habilidad de una antena operando eficien-temente en una frecuencia. Esto se puede apreciar a partir de la ecuaci´on (3.1) De la ley de Ampere se tiene que:
~ Hr =
µ I
2πr
¶
~a[a/m] (3.1)
donde
~ H = B~
µ0
es la intensidad de campo magn´etico, B~ es la densidad de flujo magn´etico. Si el flu-jo magn´etico esta definido como:
Φ = BS[V.s] (3.2)
donde S es el ´area de la antena de aro, entonces el potencial en las terminales de la antena de aro debido al un flujo magn´etico se puede determinar por:
V0 = 2πf0QBSN[V] (3.3)
Dondef0 es la frecuencia de operaci´on del sistema, Q es el factor de calidad de la
para la tecnolog´ıa RFID de campo cercano la frecuencia m´as adecuada es 13.56 MHz, la cual se estipula como frecuencia centra por la normas ISO 14443. As´ı mismo la
se-lectividad espacial (SE) puede determinarse como:
SE= 10loghPmin P t
i
[dB] (3.4)
dondePmines la potencia m´ınima para activar el transponder y Pt es la potencia m´ınima que requiere el transonder para activarse. Este par´ametro tambi´en se puede especificar como funci´on del flujo magn´etico, entonces si ΦA el flujo magn´etico re-querido para activar al transponder y ΦBes el flujo a trav´es de la antena del transpon-der se tiene:
SE = 20 loghΦA ΦB i
(3.5)
En la tecnolog´ıa RFID se tiene una comunicaci´on bidireccional entre el lector y la etiqueta, el sistema para la transmisi´on de la informaci´on var´ıa dependiendo de la fre-cuencia de trabajo (f r), as´ı se puede identificar el sistema como de acoplamiento elec-tromagn´etico (acoplamiento inductivo) o de propagaci´on de ondas electromagn´eticas. Si consideramos que el acoplamiento cerrado (close coupling) es utilizado para las frecuencias mayores a 30 MHz, mientras que los sistemas de acoplamiento
magn´etico tienen su frecuencia de trabajo en el rango de 135 KHz y 13.56 MHz, m´as este rango no es del todo estricto y se puede considerar para frecuencias ligeramente mas elevadas a lo mencionado, por lo que se considera para el an´alisis de equipo de RFID utilizado en este trabajo un acoplamiento magn´etico para la transferencia de datos entre el lector y la etiqueta. Para los sistemas de acoplamiento inductivo se da como generalidad el uso de etiquetas pasivas, partiendo de lo anterior para la elecci´on de la etiqueta que se integrar´a al sistema. Un esquema que ilustra el acoplamiento en los sistemas de RFID, se muestra en la figura (4.1).
4.1. Sistemas de acoplamiento inductivo
En estos sistemas tanto el lector como la etiqueta tienen bobinas de gran tama˜no que fungir´an como antenas de comunicaci´on, estas bobinas deben su gran tama˜no a la longitud de onda (λ), obtenida de la expresi´on (4.1)
λ= c
f (4.1)
Fig. 4.1: Fen´omeno de acoplamiento inductivo para la tecnolog´ıa RFID
(3∗108m
s), obteniendo una λ de 22.1 m. Como la longitud de onda es considerable-mente mayor a la distancia que se puede tener entre el lector y la etiqueta, el campo electromagn´etico puede ser tratado como un campo magn´etico alternante con respec-to a la distancia entre etiqueta y lecrespec-tor.- Por lo que los sistemas de RFID de 13.56 MHz tienen como zona de operaci´on el campo creado junto a la antena del lector.
4.2. Transferencia de forma remota del suministro de energ´ıa
El lector recibe alimentaci´on energ´etica y los datos de su conexi´on a la PC, es-tos daes-tos son modulados y amplificados. Al ser irradiados por la antena del lector se crea en esta una variaci´on de voltaje, que crea un campo el´ectrico variante en el
figu-ra (4.2) se muestfigu-ra la relaci´on de enrg´ıa entre el lector y eltransponder, desde la ´ ulti-ma etapa del lector (antena y capacitor de acoplamiento) hasta el inicio de
rectifi-caci´on del transponderse muestra a grandes rasgos la relaci´on de enrg´ıa entre el lec-tor y el transponder.
Fig. 4.2: Se muestra a grandes rasgos la relaci´on de enrg´ıa entre el lector y eltransponder
La transferencia de datos se da por medio de una doble modulaci´on, la primera de ASK para la frecuencia de 13.56 MHz y una segunda modulaci´on BPSK en
fre-cuencia 847 KHz que es la que contiene directamente los datos [6]. En la figura (4.3) se muestra el seguimiento de los datos del lector a el transponder, mientras que en la figura (4.4) se muestra el regreso de la informaci´on deltransponder a el lector.
Para ampliar el panorama de funcionamiento del sistema se presentara el fun-cionamiento desde el punto de vista de la transferencia de energ´ıa y del enlace (en-lace de subida y en(en-lace de bajada). Estos en(en-laces ser´an considerados tomando como referencia a el transponder, por lo que al enlace del lector a el transponder es el en-lace de subida, y el del transponder a el lector es un enlace de bajada.
4.2.1. Transferencia de energ´ıa
Fig. 4.3:Se muestra el env´ıo de datos del lector al transponder
magn´etico en el que se encuentra inmerso el transponder, y que es creado por el lec-tor, la obtenci´on de la intensidad de campo magn´etico se puede dar de manera te´ori-ca si se conocen las condiciones internas del equipo, o en un momento dado se pueden obtener de manera pr´actica por medio de los par´ametros controlables en la toma de la medici´on.
Para la obtenci´on de la intensidad de campo magn´etico se realizaron una serie de pruebas de las que obtendremos resultados indirectos y que relacionaremos por ex-presiones.
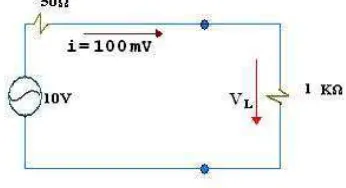
Para la realizaci´on de las pruebas de campo cercano se tuvo que tomar como par´ametro de calibraci´on, para este fin se propuso el circuito de la figura(4.5)
Donde se puede observar que la corriente que circula a trav´es del circuito es de 10mA. Se procedi´o a calcular la intensidad de campo magn´etico producida alrededor del cable proponiendo una medici´on a una distancia de 4cm, obteniendo se lo siguiente:
H = i
Fig. 4.4: Se muestra el env´ıo de datos deltransponder al lector
Fig. 4.5:Circuito propuesto para obtener una corriente de 10mA
H = 10∗10
−3A
2π∗0,04m = 39mA/m
Se efectuaron las mediciones con el equipo de campo cercano obteni´endose un voltaje en las puntas del osciloscopio.
Campo magn´etico emitido del lector al transponder
[image:47.595.225.398.353.447.2]respecto al lector obteni´endose los resultados de la grafica en la figura(4.6)
Fig. 4.6:Lecturas de campo cercano a diferentes distancias
Debe tomarse en cuenta que la primer lectura obtenida fue en el supuesto de haber percibido esa lectura a una distancia de 1 mm, y no se incluye en la gr´afica por no sostener una relaci´on proporcional con las dem´as muestras. La intensidad de campo magn´etico calculada a partir de supuesto anterior es de de 5.729 A/m, lo cual
nos permite corroborar con forme a la norma ISO/IEC 14443-2, que el campo se en-cuentra dentro del rango establecido para el campo en lectura de contacto consider-ado de 1.5 A/m a 7.5 A/m .
Como puede observarse las lecturas percibidas por el equipo de campo cercano son voltajes, mismos que nos permitir´an por medio de la obtenci´on de la corriente que circula por el circuito calcular el campo magn´etico emitido por el lector. Quedan-do la gr´afica de la figura (4.7) en funci´on de H.
4.2.2. Abastecimiento remoto de potencial
Fig. 4.7:Valores obtenidos de la relaci´on de intensidad de campo magn´etico
(d), en un conductor con una superficie (S).
El flujo de campo magn´etico (Φ) a trav´es de una bobina esta dado por:
Φ = Z
B·ds (4.3)
Es decir
Φ =B(d)S (4.4)
y la densidad de campo magn´etico :
B =µ0H (4.5)
Nos es posible determinar la densidad de campo magn´etico a partir de los resul-tados obtenidos y considerando la permeabilidad magn´etica intr´ınseca del vac´ıo (µ0).
Obteniendo como densidad de campo magn´etico:
B = (4π∗10−7
H/m)(0,026A/m) = 3,26∗10−8
W b/m2
Esta densidad magn´etica inducida nos da como resultado una tensi´on cuando el circuito resonante LC esta sintonizado a la frecuencia de resonancia, esta tensi´on
in-ducida de unos cuanto voltios ser´a aplicada a las terminales del circuito integrado de-spu´es de pasar por la etapa de rectificaci´on y filtrado, los capacitores utilizados para la frecuencia de 13.56 MHz son de varias decenas de picofarads (pF). La cantidad de la energ´ıa esta en funci´on de las antenas (del lector y eltransponder)que est´en en sin-ton´ıa su precisi´on y tolerancia. Las fluctuaciones pueden ser generadas por, el coefi-ciente de acoplamiento, el factor de calidad (Q) de la sinton´ıa de los circuitos, entre otros. Si se tienen como aceptable el valor de Q, el umbral para un buen suministro se logra por una parte teniendo un m´ınimo de inducci´on (Bmin) y por otra parte, el acoplamiento magn´etico (dependiente de la distancia) en relaci´on con la posibilidad
de ofrecer una cantidad suficiente de energ´ıa a el transponder.
4.2.3. Factor de acoplamiento
Este factor nos indicar´a la eficiencia de nuestro equipo en el punto de lectura del
transponder, este factor puede ser k = 1 para un m´aximo acoplamiento, hasta k = 0 para indicar la ausencia de acoplamiento, para los sistemas de RFID el coeficiente de acoplamiento es poco, teniendo un bajo porcentaje del acoplamiento del sistema de comunicaci´on para la transferencia de datos. Este factor esta dado por:
k = √ M
L1∗L2
(4.7)
Donde:
M: es la inductancia mutua de las bobinas.L1yL2: Son las inductancias propias
de cada bobina.
Calculo de inductancias
Partiendo de la obtenci´on de las inductancias de las bobinas del lector y la eti-queta, por medio de sus par´ametros f´ısico, se tiene la siguiente expresi´on para el cal-culo de inductancias.
L=L1+L2+L3+. . .+Ln−M+−M− (4.8)
DondeL1hastaLn son las inductancias propias de la bobina, y M(+) junto con
M(−) son las inductancias mutuas ( Ma,b), teniendo cada una su ecuaci´on de obten-ci´on.
Ln= 0,002l ½
ln 2l
w+t + 0,50049 + w+t
3l
¾
(4.9)
Donde: w = Es el ancho de la pista en cm t = El alto de la pista en cm
l = Longitud del tramo de pista a calcular en cm
Ma,b= (2∗10−4)l n
lnhl
d +
³ 1 + l
2
d2
´1/2i
−³1 + d
2
l2
´1/2 + d
l
o
(4.10)
Donde:
d = Es la distancia entre las pistas en cm (tomada de centro a centro) l = Longitud del tramo de pista a calcular en cm
Para el caso del lector las medidas (en cm) son:
l1 = 2,35, l2 = 7,9, l3 = 5, l4 = 7,9, l5 = 4,8, l6 = 7,5, l7 = 4,6, l8 = 7,3, l9 = 4,4, l10 =
7,3, l11 = 4,1, l12= 6,9, l13 = 3,5
Fig. 4.8: Indicador de la toma de distancias
Teniendo los valores de w= 0,2cm, t= 0,0034cm, obtenemos la inductancia del lector de L= 0,674439µH
De manera similar obtendremos la inductancia de la bobina, con unos valores de longitud de:
l1 = 3,8, l2 = 3,8, l3 = 3,8, l4 = 3,7, l5 = 3,7, l6 = 3,7, l7 = 3,6, l8 = 3,6, l9 = 3,6, l10 =
3,5, l11 = 3,5, l12 = 3,5, l13 = 3,4, l14 = 3,4, l15 = 3,4, l16 = 3,3, l17 = 3,3, l18 =
3,3, l19 = 3,2, l20= 3,2, l21 = 3,2, l22= 3,1, l23= 3,1, l24 = 3,1, l25= 3, l26= 3, l23= 3
Teniendo los valores de w = 0,02cm, t = 0,00034cm, obtenemos la inductancia del transponder de L= 0,3866µH
A partir de lo anterior tendremos que M se obtiene la siguiente relaci´on
M12=
B2∗N2∗A2
I1
= Φ∗N2
I1
(4.11)
I = Φ
L (4.12)
Se sustituye en la expresi´on de flujo de campo magn´etico y considerando a la
bobina cono un ´area de S = N πa2
= 0,0408228 , la expresi´on queda de la siguiente manera:
Φ =BS = (3,26∗10−8W b/m 2
)(0,0408228m2
) = 1,330∗10−9W b (4.13)
De la ecuaci´on (4.12) se obtiene la corriente de la bobina de la etiqueta, con un valor deI = 3,42mA
Con estos valores se obtiene la inductancia mutua del sistema de
M12 =
9∗1,33099∗10−9W b
36mA = 332,274nH
Ahora se sustituye la inductancia mutua en la ecuaci´on (4.7), obteniendo un factor de acoplamiento dek = 0,651 es decir del 65 %, el cual es favorable consideran-to que esconsideran-tos equipo tienden a tener un facconsideran-tor de acoplamienconsideran-to muy reducido.
4.2.4. Enlace de subida
Para el caso de comunicaci´on con canal ascendente, el lector se comunica con el transponder por medio de una codificaci´on (binaria) y un sistema de modulaci´on que no afecte la calidad de suministro de energ´ıa a distancia.
El factor de acoplamiento es suficiente para proporcionar la energ´ıa suficiente a eltransponder, y entablar el canal de comunicaci´on.
4.2.5. Enlace de bajada
Para variar esta carga eltransponder modifica el consumo de energ´ıa y se ve re-flejado en el campo magn´etico, y debido al acoplamiento magn´etico entre el
LA TECNOLOG´IA RFID DE 13.56 MHZ
En el presente cap´ıtulo se hace un an´alisis de la modulaci´on y transferencia de datos de la tecnolog´ıa RFID de 13.56 MHz conforme a lo establecido en la norma ISO/IEC 14443. Siendo necesario el estudio y selecci´on de los puntos m´as relevantes establecidos en la norma as´ı como la realizaci´on de mediciones que permitan el an´ali-sis de las limitaciones presentadas por este tipo de an´ali-sistemas.
5.1. Normatividad
Para los sistemas de tecnolog´ıa RFID de 13.56 MHz existen diversas normas que presentan los lineamientos para establecer una comunicaci´on y transferencia de datos estandar. Las normas ISO 14443 A/B, ISO 15693 y ISO 18000-3 son actualmente nor-mas enfocadas a las llamadas tarjetas inteligentes, lo cual hace referencia a la forma en la cual es presentado el transponder. El punto que diferencia a las normas
anteri-ores es la caracter´ıstica de acoplamiento. Para ISO 15693 el acoplamiento es consider-ado un acoplamiento cercano o lectura decontacto, cuya distancia m´axima a la cual se puede efectuar una lectura es de 1cm. ISO 14443 por su parte es considerada de
proximidad, dando esto como consecuencia que el rango de lectura sea mayor, aproxi-madamente 10 cm dependiendo de la geometr´ıa de la etiqueta y dise˜no del transpon-der. La norma ISO 18000-3 introduce el t´ermino de acoplamiento remoto, haciendo esto referencia a un incremento en el rango de lectura de igual manera que ISO 14443. Para el caso espec´ıfico de este trabajo se eligi´o un lector compatible con las
norma ISO/IEC 14443A como base para el an´alisis de las se˜nales emitidas por la lec-tora con el fin de comprobar que tanto el funcionamiento del lector como de la
eti-queta se encuentran conforme a la norma.
5.2. Estandar internacional ISO/IEC 14443
La Organizaci´on Internacional de Estandarizaci´on (ISO) en conjunto con la Comisi´on Internacional Electrot´ecnica (IEC) establecieron el est´andar ISO/IEC 14443
con el fin de garantizar una interoperabilidad para etiquetas inteligentes de proximi-dad (Proximity Smart Cards).
La norma ISO/IEC 14443 est´a conformada por cuatro partes:
14443−1: Caracter´ısticas F´ısicas
14443−2: Interface de se˜nal y potencia de radiofrecuencia
14443−3: Inicializaci´on y anticolisi´on
14443−4: Protocolo de transmisi´on
Dos protocolos de comunicaci´on son reconocidos por el est´andar, tipo A y tipo B, diferenciados por el tratamiento de la se˜nal de la etiqueta al lector y viceversa.
5.2.1. ISO 14443-1: Caracter´ısticas f´ısicas
En la primera parte de la norma ISO/IEC 14443 se describen las caracter´ısticas f´ısicas de los PICCs conforme a est´andares internacionales. Para la aplicaci´on de la presente norma es necesario tener en cuenta diversos documentos a fines, tales como:
ISO/IEC7810: Identificaci´on de tarjetas- Caracter´ısticas f´ısicas
ISO/IEC10373−6: Identificaci´on de tarjetas - M´etodos de prueba - Tarjetas de proximidad
ISO/IEC15457 −1: Identificaci´on de tarjetas Tarjetas delgadas flexibles -Caracter´ısticas generales.
ISO/IEC15457 −3: Identificaci´on de tarjetas Tarjetas delgadas flexibles -M´etodos de pruebas
Antena
En concordancia con lo antes expuesto, las dimensiones de la antena del
transponder no debe exceder de 86mm×54mm×3mm.
Campo magn´etico alternante
El tiempo promedio al cual el transponder deber´a seguir operando de manera eficiente bajo una intensidad de campo de 10 A/m, es de 30 s. La intensidad de cam-po m´axima permitida es 12 A/m.
5.2.2. ISO 14443-2: Interface de se˜nal y potencia de radiofrecuencia
En la segunda parte de la norma ISO/IEC 14443 se describen las caracter´ısticas de potencia de radiofrecuencia as´ı como la interface de se˜nal para el establecimiento del lector y eltransponder.
Potencia de transferencia
Frecuencia
La frecuencia fc del campo de radiofrecuencia deber´a de ser de 13.56 MHz± 7 KHz.
Campo de operaci´on
Fig. 5.1:Ejemplo de se˜nales de comunicaci´on PCD-PICC Tipo A y Tipo B
Se˜nal
El PCD deber´a generar una modulaci´on de pulsos de acuerdo con las clausulas mostradas en la figura (5.1) y la figura (5.2). Dentro de las clausulas se hace menci´on de los dos tipos de se˜nales: tipo A y tipo B. El PCD deber´a alternar entre los dife-rentes tipos de modulaci´on antes de la detecci´on de la presencia de un PICC tipo A
o tipo B. S´olo una se˜nal de la interfaz de comunicaci´on puede estar activa durante el per´ıodo de sesiones hasta que la desactivaci´on sea por dada por el PCD o por elimi-naci´on delPICC. Para per´ıodos de sesiones siguientes se puede proceder con cualquier otro tipo de modulaci´on.
Interfaz de se˜nal de comunicaci´on tipo A
Comunicaci´on PCD - PICC
El di´alogo inicial entre elPCD y elPICC debe cumplir con los siguientes pasos:
Activaci´on del PICC por medio del campo producido por elPCD
Estado de espera por parte del PICC hasta recibir un comando por parte del
PCD
Transmisi´on de comandos por parte delPCD
Fig. 5.2:Ejemplo de se˜nales de comunicaci´on PCD-PICC Tipo A y Tipo B
Tasa de bit
La tasa de transmisi´on de bit durante la inicializaci´on y anticolisi´on debe ser
fc/128( 106kbit/s). La tasa de transmisi´on de bit despu´es de la inicializaci´on y anti-colisi´on puede ser:
fc/128( 106kbit/s)
fc/64( 212kbit/s)
fc/32( 424kbit/s)
fc/16( 847kbit/s)
Representaci´on de bit y codificaci´on
Para la representaci´on de bit, las siguientes secuencias son definidas:
Par´ametro fc/128 fc/64 fc/32 fc/16
tb 128/fc 64/fc 32/fc 16/fc
tx 64/fc 32/fc 16/fc 8/fc
Tab. 5.1: Diferentes parametros de frecuencias
Secuencia Y: Para el tiempo completo de bit no debe ocurrir modulaci´on.
Secuencia Z: Al principio de la duraci´on de bit, debe ocurrir una pausa.
En la figura (5.3) en conjunto con la tabla (5.1) se ilustran las secuencias X,Y y Z.
Fig. 5.3:Secuencias X, Y y Z
Las secuencias anteriores sirven para codificar la informaci´on:
”1”l´ogico: secuencia X
”0”l´ogico: secuencia Y
Para la secuencia Y existen dos excepciones:
Si existen dos ceros continuos, se deber´a utilizar la secuencia Z para el segun-do cero.
Si el primer bit despu´es del inicio de trama es cero, la secuencia Z deber´a ser utilizada para representar ese o cualquier cero que le sigan despu´es.
T´ermino de la comunicaci´on: cero l´ogico seguido de la secuencia Z.
Ausencia de informaci´on: al menos dos secuencias Y.
Comunicaci´on PICC - PCD
Modulaci´on de carga
La comunicaci´on entre elPCD y elPICC debe ser por medio de un acoplamien-to inductivo, donde la frecuencia de portadora es cargada para generar una subpor-tadora con frecuencia fs. La subporsubpor-tadora debe ser generada por la interrupci´on de una carga en el PICC.
La amplitud de la modulaci´on de carga delPICC debe ser de al menos 22/H0,5
mV pico.
Por su parte, el PCD debe ser capaz de recibir una amplitud de la modulaci´on de carga de al menos 18/H0,5
mVpico.
Fig. 5.4: Amplitud de modulaci´on de carga
Subportadora
La frecuencia fs de la subportadora debe ser fc/16( 847kHz). Por consecuen-cia, durante la inicializaci´on y anticolisi´on, la duraci´on de un bit es equivalente a 8 periodos de la subportadora.
La codificaci´on as´ı como la representaci´on de bit para una tasa de datos de
fc/128 ser´a la codificaci´on Manchester. La codificaci´on as´ı como la representaci´on de
bit para las tasas de datos fc/64, fc/32, fc/16 ser´a la codificaci´on NRZ-L.
5.2.3. ISO 14443-3:Inicializaci´on y anticolisi´on
La tercera parte de la norma ISO/IEC 14443 describe el protocolo de iniciaci´on
y anticolisi´on paraPICCs tipo A.
Formato de trama
Las tramas deben ser transferidas en pares, PCD-PICC seguidas por PICC
-PCD, teniendo en cuenta la siguiente secuencia: Trama PCD:
Inicio de comunicaci´onPCD
Informaci´on y detecci´on de errores
Terminaci´on de comunicaci´on PCD
Tiempo de retardo de trama(FTD) PCD - PICC
Trama PICC:
Inicio de comunicaci´onPICC
Informaci´on y detecci´on de errores
Terminaci´on de comunicaci´on PICC
Tipos de trama
Existen tres tipos de tramas:
Tramas cortas
Tramas est´andar para comandos comunes
Tramas de anticolisi´on de orientaci´on de bit para comandos de anticolisi´on.
Trama corta
Las tramas cortas son utilizadas para inicializar la comunicaci´on y consisten de:
Inicio de comunicaci´on
Siete bits de datos, donde LSB va al inicio.
Terminaci´on de comunicaci´on
Trama est´andar
Las tramas est´andar son utilizadas para intercambiar informaci´on y consisten de:
Inicio de comunicaci´on
n * (8 bits de datos + un bit de paridad). El LSB es transmitido primero.
Terminaci´on de comunicaci´on