Implementación de un módulo didáctico con control PID y lógica difusa para manejar las variables nivel y caudal
142
0
0
Texto completo
(2) ii. DECLARACIÓN. Nosotros, Casa Ilaquiche María Alejandra y Ortiz Ortiz Javier Esteban, declaramos bajo juramento que el trabajo aquí descrito es de nuestra autoría; que no ha sido previamente presentada para ningún grado o calificación profesional; y, que hemos consultado las referencias bibliográficas que se incluyen en este documento.. A través de la presente declaración cedemos nuestros derechos de propiedad intelectual correspondiente a este trabajo, a la escuela Politécnica Nacional, según lo establecido por la Ley de Propiedad Intelectual, por su Reglamento y por la normatividad institucional vigente.. Casa Ilaquiche María Alejandra. Ortiz Ortiz Javier Esteban.
(3) iii. CERTIFICACIÓN. Certifico que el presente trabajo fue desarrollado por Casa Ilaquiche María Alejandra y Ortiz Ortiz Javier Esteban, bajo mi supervisión.. Ing. Andrés Cela MSc. DIRECTOR DE PROYECTO.
(4) iv. AGRADECIMIENTO. Agradezco a Dios quien ha sido mi guía y mi fortaleza para poder culminar esta meta que por años anhele.. A mi familia por su apoyo en cada decisión y proyecto que he tomado, gracias por levantarme y apoyarme en todos los momentos difíciles de mi vida.. A Javier mi compañero de tesis, por formar parte muy importante de este sueño, gracias por la confianza, apoyo, dedicación y esfuerzo, y por enseñarme que los problemas son para solucionarlos y no para dejarse abatir.. Y no menos importantes a todos mis amigos que con sus consejos y palabras de aliento me han empujado para lograr este sueño, gracias Paola Herrería, Harold Angulo, Diego Ordoñez, Javier Castro, David Beltràn, Ing. Iván Reinoso, Arq. Geovanny Suasnava y demás amigos que en el camino han formado parte muy fundamental para lograr esta meta.. No ha sido sencillo el camino, pero gracias a cada uno de ustedes por su apoyo, amor y su amistad.. Alejandra Casa.
(5) v. AGRADECIMIENTO. Doy gracias a Dios por darme salud y permitirme terminar el proyecto de titulación culminando un objetivo importante en mi vida; doy gracias a mis Padres y familiares por el apoyo incondicional durante el tiempo que lo necesité y por su comprensión durante este largo periodo, agradezco a profesores por brindarme su conocimiento y paciencia, por su apoyo y exigencia para alcanzar mayores objetivos; agradezco el apoyo de la empresa Coledidacticum por su gestión y ayuda en la implementación del proyecto.. Un infinito agradecimiento a las personas que me brindaron su conocimiento valioso, tiempo y apoyo de manera incondicional, a los Profesores que ayudaron a concluir este trabajo, que de alguna forma se preocuparon y contribuyeron a terminar este proyecto, gracias por su preocupación y ayuda; agradezco al Ing. Andrés Cela Tutor del Proyecto por su conocimiento, ayuda y tiempo entregado, un fraterno agradecimiento a mi compañera de Tesis Alejandra, a mis compañeros de trabajo y amigos que con una sonrisa siempre me motivaron a seguir adelante.. Atentamente,. Javier E. Ortiz.
(6) vi. DEDICATORIA. Dedico esta tesis a Dios por haberme acompañado y guiado a lo largo de mi carrera, por ser mi fortaleza en los momentos de debilidad y por brindarme una vida llena de aprendizajes, experiencias y felicidad.. Con mucho cariño a mis padres María y Gabriel quienes han estado conmigo en todo momento, gracias por todo papá y mamá por creer en mí, por ser mi inspiración, mi ejemplo y porque siempre han estado apoyándome y brindándome todo su amor.. A mis hermanos Sandra, Daysi y José Luis por estar ahí cuando los he necesitado, por sus palabras de aliento y su apoyo incondicional, también a mis sobrinos Nicolás y Leam quienes con su inocencia y amor han sido un motivo fundamental para continuar luchando por mis sueños.. A ustedes mi familia les dedico este trabajo ya que sin ustedes a mi lado no lo hubiera logrado.. Alejandra Casa.
(7) vii. DEDICATORIA. Dedicó este Trabajo a mi esposa Fernanda Andrade y a mi hijo Samuel, son parte fundamental en mi vida y con quien comparto mis alegrías y triunfos.. Que el esfuerzo, la constancia y la dedicación sea un ejemplo, y para que a pesar de las circunstancias adversas jamás se renuncié a terminar nuestros objetivos.. Atentamente,. Javier E. Ortiz.
(8) viii. CONTENIDO. DECLARACIÓN .................................................................................................................... ii CERTIFICACIÓN ................................................................................................................. iii AGRADECIMIENTO ............................................................................................................ iv AGRADECIMIENTO ............................................................................................................. v DEDICATORIA ..................................................................................................................... vi DEDICATORIA .................................................................................................................... vii RESUMEN .......................................................................................................................... xiii PRESENTACIÓN ............................................................................................................... xiv CAPÍTULO 1 ......................................................................................................................... 1 FUNDAMENTOS TEÓRICOS............................................................................................... 1 1.1.. ANTECEDENTES. ................................................................................................ 1. 1.2.. DETALLES GENERALES. ................................................................................... 1. 1.3.. MÓDULO FESTO DIDACTIC. .............................................................................. 2. 1.3.1. DESCRIPCIÓN DEL SISTEMA. ....................................................................... 2 1.3.2. COMPONENTES DEL MÓDULO FESTO DIDACTIC. ..................................... 3 1.3.2.1.. Componentes Mecánicos. ......................................................................... 4. 1.3.2.1.1. Tanques Graduados: ............................................................................ 4 1.3.2.1.2. Tuberías y accesorios de tuberías:....................................................... 5 1.3.2.2.. Sensores. ................................................................................................... 6. 1.3.2.3.1. Sensor Capacitivo de proximidad: ........................................................ 6 1.3.2.3.2. Sensor Ultrasónico: ............................................................................... 7 1.3.2.3.3. Sensor de Caudal: ................................................................................ 8 1.3.2.3.4. Sensor de Flotador:.............................................................................. 8 1.3.2.3.. Actuadores................................................................................................. 9. 1.3.2.4.1. Bomba: .................................................................................................. 9 1.3.2.4.2. Válvula solenoide de bola: .................................................................. 10 1.3.2.4.3. Válvula Proporcional: ......................................................................... 11 1.3.2.4.4. Unidad de Mantenimiento ................................................................... 12 1.3.2.4.. Componentes Eléctricos. ........................................................................ 13. 1.3.2.5.1. Placa de Entradas y Salidas ............................................................... 13.
(9) ix. 1.4.. TÈCNICAS DE CONTROL PID Y LOGICA DIFUSA. ........................................ 13. 1.4.1. TÉCNICA DE CONTROL PID ......................................................................... 14 1.4.1.1.. Estructura del PID ................................................................................... 14. 1.4.1.2.. PID Discreto............................................................................................. 17. 1.4.1.3.. Sintonización para Controladores PID .................................................... 18. 1.4.2. LÒGICA DIFUSA ............................................................................................. 20 1.4.2.1.. Teoría de los Conjuntos Difusos ............................................................. 20. 1.4.2.1.1. Conjuntos Clásicos ............................................................................. 21 1.4.2.1.2. Conjuntos Difusos ............................................................................... 21 1.4.2.2.. Funciones de membresía ........................................................................ 22. 1.4.2.3.. Controlador Difuso ................................................................................... 24. CAPÍTULO 2 ....................................................................................................................... 29 IMPLEMENTACIÓN DE HARDWARE ............................................................................... 29 2.1.. IMPLEMENTACIÓN DE LA PLANTA ............................................................... 29. 2.1.1. FUNCIONAMIENTO DEL SISTEMA............................................................... 29 2.1.2. DIAGRAMAS DE FLUJO DEL SISTEMA ....................................................... 31 2.1.2.1.. Sistema de control de nivel ..................................................................... 31. 2.1.2.2.. Sistema de control de caudal .................................................................. 32. 2.1.3. CONEXIONES ELÉCTRICAS Y ACONDICIONADORES. ............................ 33 2.1.4. TARJETA DE ADQUISICIÓN DE DATOS EASY PORT ................................ 37 CAPÍTULO 3 ....................................................................................................................... 39 DESARROLLO DEL SOFTWARE ..................................................................................... 39 3.1. DISEÑO E IMPLEMENTACIÒN DE LOS CONTROLADORES PID DE LAS VARIABLES DE NIVEL Y CAUDAL. ............................................................................. 39 3.1.1. MODELAMIENTO E IMPLEMENTACIÓN DEL CONTROLADOR PID DE NIVEL........................................................................................................................... 39 3.1.1.1.. Modelamiento para el Control de Nivel. ................................................. 40. 3.1.1.2.. Sintonización para el Control de Nivel. .................................................. 43. 3.1.1.3.. Implementación de un Controlador PID de Nivel en Labview. ............... 45. 3.1.2. MODELAMIENTO E IMPLEMENTACIÓN DE UN CONTROLADOR PID DE CAUDAL. ..................................................................................................................... 47 3.1.2.1.. Modelamiento para el Control de Caudal. .............................................. 48. 3.1.2.2.. Sintonización para Control PID de Caudal. ............................................ 50. 3.1.2.3.. Implementación del Control de Caudal en Labview. .............................. 51.
(10) x. 3.2.. DISEÑO E IMPLEMENTACIÒN DE LOS CONTROLADORES DE LOGICA. DIFUSA DE LAS VARIABLES DE NIVEL Y CAUDAL. ................................................ 53 3.2.1. DISEÑO E IMPLEMENTACIÓN DEL CONTROLADOR DE LÓGICA DIFUSA PARA LA VARIABLE DE NIVEL. ................................................................................ 53 3.2.1.1.. Diseño del Controlador de Lógica Difusa para la variable de nivel ........ 53. 3.2.1.2.. Implementación del Controlador de Lógica Difusa para la variable de. nivel.. 56. 3.2.2. DISEÑO E IMPLEMENTACIÓN DEL CONTROLADOR DE LÓGICA DIFUSA PARA LA VARIABLE DE CAUDAL. ............................................................................ 58 3.2.2.1.. Diseño del Controlador de Lógica Difusa para la variable de Caudal.... 58. 3.2.2.2.. Implementación del Controlador de Lógica Difusa para la variable de. Caudal. 61 CAPÍTULO 4 ....................................................................................................................... 63 PRUEBAS Y RESULTADOS.............................................................................................. 63 4.1.. ANÁLISIS DE RESULTADOS. CONTROLADOR PID VS CONTROLADOR DE. LÓGICA DIFUSA. ........................................................................................................... 63 4.1.1. ANÁLISIS DE RESULTADOS VARIABLE NIVEL. ......................................... 64 4.1.2. ANÁLISIS DE RESULTADOS VARIABLE CAUDAL. ..................................... 69 CAPÍTULO 5 ....................................................................................................................... 74 CONCLUSIONES Y RECOMENDACIONES ..................................................................... 74 5.1.. CONCLUSIONES................................................................................................ 74. 5.2.. RECOMENDACIONES. ...................................................................................... 76. REFERENCIAS BIBLIOGRÁFIA ....................................................................................... 77 ANEXO A. ......................................................................................................................... A-1 MANUAL DE USUARIO ................................................................................................... A-1 A.1. DETALLES TÉCNICOS: ...................................................................................... A-2 A.2. ESQUEMA DE CONEXIÓN. ................................................................................ A-4 A.3. DETALLE DE ENTRADAS Y SALIDAS DIGITALES .......................................... A-5 A.4. PROCEDIMIENTOS PARA REALIZAR LAS MEDIDAS. .................................... A-6 A.4.1. PROCEDIMIENTO PARA REALIZAR MEDIDAS DE CONTROL DE NIVEL (PID) ........................................................................................................................... A-6 A.4.2. PASOS PARA REALIZAR MEDIDAS DE CONTROL DE NIVEL (DIFUSO). A-8.
(11) xi. A.4.3. PASOS PARA REALIZAR MEDIDAS DE CONTROL DE CAUDAL (PID) .. A-10 A.4.4. PASOS PARA REALIZAR MEDIDAS DE CONTROL DE CAUDAL (FUZZY) A13 ANEXO B. ......................................................................................................................... B-1 DIAGRAMAS DE PROGRAMACIÒN .............................................................................. B-1 B.1. ENTRADAS Y SALIDAS DEL EASY PORT. ....................................................... B-1 B.2. DIAGRAMA DE PROGRAMACIÓN DEL CONTROLADOR DE NIVEL PID. ..... B-2 B.3. DIAGRAMA DE PROGRAMACIÓN DEL CONTROLADOR DE CAUDAL PID. B-3 B.4. DIAGRAMA DE PROGRAMACIÓN DEL SUB VI CONTROLADOR PID. ....... B-4 B.5. DIAGRAMA DE PROGRAMACIÓN DE SUB VI ‘S ACCIONES DE CONTROL P, I Y D. .............................................................................................................................. B-5 B.5.1. SUB VI ACCIONES DE CONTROL PROPORCIONAL ................................ B-5 B.5.2. SUB VI ACCIONES DE CONTROL INTEGRAL ............................................ B-5 B.5.3. SUB VI ACCIONES DE CONTROL DERIVATIVA......................................... B-5 B.6. DIAGRAMA DE PROGRAMACIÓN DEL CONTROLADOR DE NIVEL LÓGICA DIFUSA.......................................................................................................................... B-6 B.7. DIAGRAMA DE PROGRAMACIÓN DEL CONTROLADOR DE CAUDAL LÓGICA DIFUSA. ......................................................................................................... B-7 ANEXO C. ......................................................................................................................... C-1 DIAGRAMAS DE CONTROL ........................................................................................... C-1 ANEXO D. ......................................................................................................................... D-1 CARACTERÍSTICAS TÉCNICAS .................................................................................... D-1 D.1. ESPECIFICACIONES TÉCNICAS DE TANQUE MARCA FESTO ..................... D-1 D.2. ESPECIFICACIONES TÉCNICAS DE TUBERÍAS Y ACCESORIOS. ................ D-2 D.2.1. TUBERÍA: ....................................................................................................... D-2 D.2.2. ACCESORIOS ............................................................................................... D-2 D.3. ESPECIFICACIONES TÉCNICAS SENSOR CAPACITIVO DE PROXIMIDAD. D-4 D.4. ESPECIFICACIONES TÉCNICAS SENSOR ULTRASÓNICO. .......................... D-6 D.4.1. CONFIGURACIÓN: ........................................................................................ D-7 D.4.2. DETALLES DE CONFIGURACIÓN ADIRO: .................................................. D-8 D.4.3. CONEXIÓN: .................................................................................................... D-8.
(12) xii. D.5. ESPECIFICACIONES TÉCNICAS SENSOR DE CAUDAL............................... D-9 D.5.1. CONFIGURACIÓN DE PINES: .................................................................... D-10 D.5.2. CONEXIONES ELÉCTRICAS: ..................................................................... D-10 D.6. ESPECIFICACIONES TÉCNICAS SENSOR FLOTADOR .............................. D-11 D.6.1. CONEXIÓN: .................................................................................................. D-11 D.7. ESPECIFICACIONES TÉCNICAS BOMBA ....................................................... D-13 D.7.1. PRESIÓN Y RENDIMIENTO: ....................................................................... D-14 D.7.2. CONEXIÓN: .................................................................................................. D-14 D.8. ESPECIFICACIONES TÉCNICAS 2W VÁLVULA SOLENOIDE DE BOLA.... D-15 D.8.1 ACTUADOR DE CUARTO DE VUELTA SYPAR - FUNCIÓN DE DOBLE EFECTO .................................................................................................................. D-15 D.9. ESPECIFICACIONES TÉCNICAS VÁLVULA PROPORCIONAL ................... D-16 D.9.1. VÁLVULA: ..................................................................................................... D-16 D.9.2. CONTROL .................................................................................................... D-17 D.10. ESPECIFICACIONES TÉCNICAS UNIDAD DE MANTENIMIENTO. ............. D-18 D.11. DATA SHEET DE CABLE ENTRADA / SALIDA. ............................................ D-19 D.12. DATA SHEET DE CABLE ANÁLOGO. .......................................................... D-20 D.13. DATA SHEET RELÉ K1. .................................................................................. D-21 D.14. DATA SHEET RELÉ DE POTENCIA K106. ................................................... D-22 D.15. DATA SHEET REGULADOR DEL MOTOR. .................................................. D-23 D.16. DATA SHEET LIMITADOR DE CORRIENTE DE ARRANQUE. ..................... D-24.
(13) xiii. RESUMEN. En la industria, la medición de nivel y caudal es muy importante, desde el punto de vista de funcionamiento del proceso como del balance adecuado de materias primas o productos finales.. El presente trabajo de titulación tiene la finalidad de proveer al laboratorio de Control de Procesos, un módulo didáctico que permita el control de forma independiente de las variables nivel y caudal con los controladores PID y lógica Difusa, para el aprendizaje de los estudiantes que realicen prácticas de laboratorio.. Se implementará un sistema compacto de FESTO Didactic el cual permite realizar la regulación de nivel y caudal, el sistema cuenta con dos tanques, una bomba, sensores, actuadores y tubería de circulación de fácil acople, las señales son acondicionadas de tal manera que requieran una alimentación de 24 VDC y las señales analógicas que están en un rango de 0-10 VDC.. Para poder realizar el control (PID y Lógica Difusa) y la adquisición de datos se hará uso del software LabView y una tarjeta de adquisición de datos Easy port la cual controla de forma independiente a las dos variables y supervisa todo el sistema mediante los actuadores y transductores del sistema implementado.. Se podrá incorporar elementos a futuro como PLC a través de un conector de 25 pines donde se encuentran todas las señales de sensores y actuadores para realizar adaptaciones a la planta..
(14) xiv. PRESENTACIÓN. El presente proyecto tiene como finalidad proveer al Laboratorio de Control de Procesos un módulo didáctico que controle las variables de nivel y caudal mediante los controladores PID y lógica Difusa, que permita poner en práctica a los estudiantes los conocimientos adquiridos en la teoría de control.. Con este objetivo, este trabajo se ha dividido en cinco capítulos:. El capítulo uno, se realiza un análisis de requerimientos técnicos necesarios para la implementación del sistema didáctico FESTO. Se incluirá una breve introducción a la técnica de control clásico PID y una descripción de la técnica de control Difuso.. El capítulo dos, se implementa un módulo didáctico FESTO mostrando las ventajas del sistema, se incluirá el detalle técnico de las señales análogas y digitales que utilizan controladores comerciales. El capítulo tres, se detallará el método de diseño y la programación de los dispositivos a ser controlados con los algoritmos necesarios para cumplir todos los requerimientos planteados.. En el capítulo cuatro, se presentan las pruebas realizadas y resultados obtenidos del módulo implementado.. Finalmente,. en. el. capítulo. cinco,. se. recomendaciones de los resultados obtenidos.. presentan. las. conclusiones. y.
(15) 1. CAPÍTULO 1 FUNDAMENTOS TEÓRICOS. 1.1.. ANTECEDENTES.. La Escuela Politécnica Nacional, en el Laboratorio de Control de Procesos actualmente carecen de herramientas para manejo y medición de variables de control de procesos, por este motivo es necesario implementar un sistema que permita estudiar el control de variables de nivel y caudal de una forma práctica y sencilla, que a su vez permita comparar diferentes tipos de controladores analizando cuál de ellos presenta mejores resultados.. En este capítulo se realizará el análisis del funcionamiento y características de cada uno de los sensores y actuadores, para la implementación de un módulo didáctico, para controlar dos variables nivel y caudal, aunque más adelante se puede complementar con dispositivos como sensores y actuadores.. 1.2.. DETALLES GENERALES.. Para realizar cualquier acción de control o manejo del módulo didáctico es necesario tomar en cuenta las características y parámetros de funcionamiento de la planta y cada uno de sus elementos, tabla 1.1. Es necesario establecer ciertas medidas preventivas en los siguientes aspectos: Eléctrico: Utilizar sólo voltajes bajos de hasta 24VDC para alimentación de sensores y actuadores. Neumática: Se utiliza aire comprimido no debe exceder los 5 bar, la tubería debe estar bien conectada y asegurada para conectar el aire comprimido..
(16) 2. Mecánicas: Montar todos los componentes firmemente en la estructura, la bomba puede instalarse de forma vertical u horizontal, la bomba debe estar montada de forma que este inundada para evitar daños en el arranque. [1] Tabla 1.1. Datos técnicos del módulo FESTO Didactic. [1]. PARAMETROS Máxima presiòn en tuberías. VALOR 50 kPa (0.5 bar). Suministro de energía para la estaciòn. 24V. Tasa de flujo de la bomba. 22.5 l/min. Volumen máximo del tanque. 10l. Sistema de tuberías flexible. DN10 (φ=15mm). Entradas digitales. 8. Salidas digitales. 8. Entradas analogas. 2. Salidas analogas. 2. Cantidad de tanques. 2. Rango de control para la bomba. 0…..10V. Rango de control para la valvula proprocional. 0…..10V. rango de trabajo e lazo cerrado para nivel. 2…..9 l. Rango de medición del sensor de nivel. 2…..9 l. Señal de salida para el sensor de nivel. 0…..10V. Rango de trabajo en lazo cerrado para control de flujo Rango de medición del sensor de flujo. 0…..9 l/mm 0,3…..9 l/mm. El módulo dispone de un panel de entradas y salida, que nos permite la obtención de los valores de sensores y envían señales de control para los actuadores, mediante los terminales de conexión el Syslink y los terminales análogos es posible controlar a la planta mediante la tarjeta del Easy Port, para realizar la interfaz de comunicación y comandar desde el computador.. 1.3.. MÓDULO FESTO DIDACTIC.. 1.3.1. DESCRIPCIÓN DEL SISTEMA.. La estación compacta de FESTO Didactic para control de procesos Figura. 1.1., permite la regulación de temperatura, presión, nivel y caudal en bucle cerrado, es.
(17) 3. Construido con el fin de adiestrar en el campo de la industria. Este sistema tiene 4 lazos cerrados haciendo uso de dispositivos como sensores y actuadores [2].. - Sistema de control de nivel. - Sistema de control de caudal - Sistema de control de presión - Sistema de control de temperatura. Figura 1.1. Estación de trabajo FESTO Didactic. [2]. Es esta tesis se realizarán 2 lazos cerrados:. - Sistema de Control de Nivel - Sistema de Control de Caudal. Para realizar los diferentes tipos de control es necesario incluir componentes mecánicos, eléctricos, sensores y actuadores.. 1.3.2. COMPONENTES DEL MÓDULO FESTO DIDACTIC.. El sistema automatizado consta de cuatro componentes principales:. -. Componentes mecánicos..
(18) 4. -. Sensores.. -. Actuadores. -. Componentes eléctricos.. 1.3.2.1.. Componentes Mecánicos.. Los Componentes mecánicos son los equipos principales que forman el módulo y que actúa con energía para poner el módulo en funcionamiento.. 1.3.2.1.1.. Tanques Graduados:. Los tanques son semi rectangulares tiene una capacidad de 10 L, cada tanque contienen agujeros con rosca que permite el montaje de dispositivos o tuberías, necesarias para el funcionamiento correcto del sistema, como se puede observar en la Figura. 1.2.. Figura 1.2. Tanque rectangular de Macrolon.. Las características técnicas:. Ø Capacidad operativa: 10L. Ø Temperatura admisible: max. +65ºC Ø Dimensiones: 190mm x 190mm x 340mm..
(19) 5. 1.3.2.1.2.. Tuberías y accesorios de tuberías:. En la Figura.1.3., se observa la conexión de tuberías, son de material plástico polietileno, estas tuberías permiten realizar las conexione requeridas para en funcionamiento correcto del sistema, tienen un diámetro externo 15mm, su acople es de fácil conexión. [3]. Figura 1.3. Tubería de fácil armado diámetro 15mm.. Los elementos de acople Figura. 1.4., son se material rígido y rápido ajuste y son: Tapón, Racor rápido en T, Racor rápido unilateral en L y Racor rápido bilateral en L de material sintético. [3]. Figura 1.4. Accesorio de Tubería. [3]. Las características técnicas:. Ø Material: Polietileno. Ø Temperatura y presión: Agua caliente 6 bares a 65ºC, Agua fría 12 bar a 20ºC. Ø Dimensión: diámetro 15mm, longitud 2 m..
(20) 6. 1.3.2.2.. Sensores.. 1.3.2.3.1.. Sensor Capacitivo de proximidad:. El sensor de proximidad capacitivo Figura. 1.5., en su interior es un circuito resonante RC en el que varía el valor de capacitancia cuando un material se acerca al sensor, esto produce un cambio en el circuito ya que ese cambio depende de las constantes dieléctricas del material, dimensiones y distancia de los material. [3]. Figura 1.5. Sensor de proximidad capacitivo. [3]. Un detector de proximidad capacitivo B113 está situado en el lado del depósito inferior B101 y montado en una placa de perfil Figura. 1.6. El sensor se puede ajustar de acuerdo a la distancia que se requiera. [2]. Figura 1.6. Sensor de proximidad capacitivo instalado en el tanque.. Las características técnicas:. Ø Voltaje de operación: 24 V..
(21) 7. Ø Corriente máxima: 200mA. Ø Frecuencia máxima de conmutación: 25Hz.. 1.3.2.3.2.. Sensor Ultrasónico:. El sensor de ultrasonido Figura. 1.7., su principio de funcionamiento consta en la reproducción de ondas acústicas que son conducidas por el aire atmosférico, es accionado un ultrasonido generador y emite un pulso de energía ultrasónica, el pulso de la energía ultrasónica es reflejado a través de un objeto situado dentro del rango y se recupera en el receptor. [3]. Figura 1.7. Sensor Ultrasónico. [3]. El tanque B102, tiene en la parte superior ubicado el sensor ultrasónico en la Figura. 1.8., se puede observar el montaje del sensor que permite determinar el nivel del líquido dentro del tanque. [2]. Figura 1.8. Sensor Ultrasónico instalado en el tanque.. Las características técnicas:. Ø Rango de Operación: 0– 10 V.
(22) 8. Ø Rango de medición: 50 – 300 mm. 1.3.2.3.3.. Sensor de Caudal:. El caudal se detecta por medio un sensor que se basa en el principio de inducción de Faradays. El principio de funcionamiento se fundamenta en la presencia de líquido que fluye por el sensor a través de un campo magnético que genera una tensión proporcional al caudal de flujo. El voltaje se detecta a través de electrodos y se convierte en valores electrónicos análogos, binarios y de impulsos. Debido a la programación flexible, con los pulsadores, el sensor de caudal es fácil de adaptarse a diferentes condiciones. Figura. 1.9. [3]. Figura 1.9. Sensor de caudal instalado en el sistema.. Las características técnicas:. Ø Voltaje de Operación: 19-30 VDC Ø Salida Análoga: 4-20mA; 0-10V Ø Rango de medición: 0,1- 25 l/min. 1.3.2.3.4.. Sensor de Flotador:. El modo de funcionamiento del sensor Figura. 1.10., es simple y se basa directamente en el cambio del nivel de fluido, el imán integrado en el flotador acciona el interruptor de láminas herméticamente sellado en la carcasa al.
(23) 9. proporcionar movimiento, el interruptor de lengüeta se convierte en un contacto normalmente abierto (NA) o contacto normalmente cerrado (NC) [3]. Figura 1.10. Sensor de Flotado. [3]. El nivel creciente de fluido dentro del tanque superior B102 es monitorizado a un cierto nivel máximo por el interruptor de flotador si el desbordamiento del líquido se va a producir, este sensor se abrirá. Figura. 1.11. [2]. Figura 1.11. Sensor de Flotado instalado en el tanque.. Las características técnicas:. Ø Voltaje de operación: 0/24 V. Ø Recorrido flotador: 55mm 1.3.2.3.. Actuadores.. 1.3.2.4.1.. Bomba:. La bomba Figura. 1.12, es de tipo centrífuga para su arranque no debe funcionar en seco porque se producirían daños en la bomba, el líquido debe ser libre de suciedad..
(24) 10. Debe girar en el sentido determinado por las características de la bomba para evitar el incorrecto funcionamiento de la bomba y con una caída de presión de ±20%. La bomba debe ser instalada de forma horizontal, para evitar burbujas o retornos de líquido. [3]. Figura 1.12. Bomba de tipo centrífuga. [3]. La bomba Figura. 1.13, es el elemento de control para el proceso de nivel y caudal, la bomba lleva el fluido con mayor o menor caudal, ya que la bomba trabaja de manera analógica controlando su voltaje de ingreso de 0 a 10 V. [2]. Figura 1.13. Bomba centrifuga instalado en el sistema.. Las características técnicas:. Ø Rango de operación Digital: 0/24V, 0/10 L/min. Ø Rango de operación Analógico: 0 – 10V, 0-10 L/min.. 1.3.2.4.2.. Válvula solenoide de bola:. La válvula de bola bidireccional V102 Figura. 1.14., se abre y se cierra mediante un accionamiento giratorio neumático. El equipo controlado consiste en una válvula de bola con el tipo de impulsión rotativo..
(25) 11. Un solenoide válvula de 5/2 vías con patrón de puerto a NAMUR y caja de sensores están montados sobre una brida en el accionamiento giratorio. Está válvula permite que el flujo del fluido vaya desde el depósito superior B102 al depósito inferior B101. [2]. Figura 1.14. Válvula de dos vías actuador cuarto de vuelta.. La válvula solenoide de bola es controlada directamente. Si la corriente eléctrica no circula a través de la bobina, la válvula se cierra por medio de actuador giratorio neumático. [2]. Las características técnicas:. Ø Tipo de funcionamiento: abierto/cerrado. Ø Presión de Operación: 3 – 8 bares.. 1.3.2.4.3.. Válvula Proporcional:. La válvula proporcional V106 Figura. 1.15., es una válvula de 2/2 vías de accionamiento. Los pistones se accionan por la corriente de la bobina solenoide y deja pasar el flujo por la válvula, esta es control de la valvula proporcional es acciona con una salida binaria de 24V (K106). Para el control de su apertura, a la entrada de la válvula se alimenta de una señal análoga de 0 a 10V..
(26) 12. Figura 1.15. Válvula Proporcional.. Las características técnicas:. Ø Voltaje de operación: 24 VDC ±10%. Ø Voltaje de control. 0 - 10 VDC Ø Potencia: 8W. Ø Coeficiente de flujo: 15 l/min, 0,9 !" /h.. 1.3.2.4.4.. Unidad de Mantenimiento. La unidad de mantenimiento de la Figura. 1.16., permite regular la presión de aire comprimido. El manómetro nos permite ver la presión que se requiere, la válvula de cierre el paso de aire en el sistema. [3]. Figura 1.16. Unidad de Mantenimiento.. Las características técnicas:. Ø Margen de regulación de presión: 0.5 a 16 bar.
(27) 13. Ø Presión de funcionamiento: 5 bar 1.3.2.4.. Componentes Eléctricos.. 1.3.2.5.1.. Placa de Entradas y Salidas. La placa de conexión Figura. 1.17., sirve como interfaz para señales analógicas y digitales de entrada y salida. Todas las señales analógicas se convierten en 0 - 10 V y se aplican al terminal analógico. Señales digitales de máximo 8 entradas y 8 salidas se aplican al terminal de E / S. Esto garantiza la compatibilidad con la tarjeta EasyPort, EduTrainer y PLC. [2]. Figura. 1.17. Placa de Entradas y Salidas.. 1.4.. TÈCNICAS DE CONTROL PID Y LOGICA DIFUSA.. En el medio industrial se emplean técnicas de control como son el PID y la Lógica Difusa, los controladores PID (considerados como control clásico), tienen una ganancia, una variante derivativa y una integral con los cuales se puede ajustar un proceso consiguiendo que su salida sea más estable en un tiempo deseado.. Aunque existan técnicas más avanzadas, el PID es el más usado en la industria actualmente. Una posible desventaja es que se debe implementar este tipo de control para cada entrada en un sistema, es decir en un sistema MIMO (Múltiples entradas Múltiples salidas) se debe tener PIDs independientes para cada variable.
(28) 14. de entrada. Esto representa costos y con resultados no muy eficientes ya que cada salida depende solo de su entrada y no se podría tener un control global.. El control mediante la Lógica difusa facilita el control de múltiples variables de un proceso, esto se debe apreciar en los controles inteligentes difusos, donde con un solo bloque de control difuso se pueden ingresar todas las entradas y obtener todas las salidas relacionándolas por medio de tablas de sentencias y gráficos de estados. Esto es esencial en un medio industrial donde no se puede perder tiempos ni materias primas desarrollando cálculos y teniendo etapas de prueba y error.. 1.4.1. TÉCNICA DE CONTROL PID. 1.4.1.1.. Estructura del PID. El controlador PID permite comparar el valor deseado (valor referencia) con el valor de salida de la planta (valor real) y producir una señal de control para corregir el error, así se obtiene una salida que responde rápidamente a las perturbaciones producidas por agentes externos [4].. Un controlador PID analógico tiene la forma que se puede observar en la ecuación (1.1), donde cada uno de los términos, es una de las acciones del control. #$% = &' ()(*+ ,. -. ./. 0 )(*+1* , *2. 234(5+ 25. +. (1.1). !. Donde 67 es la constante proporcional, (*) es el error, 89 es el tiempo integral y *2 es el tiempo derivativo. En este proyecto la ecuación (1.1) no se puede implementar en la programación debido a que se encuentra en forma analógica. Para poder obtener la ecuación discretizada se usa. herramientas de. discretización digitalizar la expresión. [4]. Las acciones que describen el controlador PID son:.
(29) 15. Acción Proporcional. La acción proporcional es el producto de la ganancia del controlador por el error, como se muestra en la ecuación (1.2), &' constante proporcional. [4] :; (*+ = &' < )(*+. (1.2). Donde ) (*+ es la señal de error, :; (*+ es la acción proporcional y, 6' la constante proporcional. Su función de transferencia aplicando la transformada de Laplace es:. > (? + =. @A (B+ 3(B+. = 6'. (1.3). La ecuación discretizada tiene la siguiente forma matemática: :; [&] = &' < )[&]. (1.4). Al aplicar la transformada Z, se obtiene la ecuación (1.3): :; [C] = &' < )[C]. (1.5). Acción Integral. En una acción integral, la velocidad de cambio en la respuesta del controlador :D (*+ es proporcional al error )(*+. [4]. :D (*+ = &' < )(*+ , &D 0 )(*+. (1.6). Donde ) (*+ es la señal de error, :D (*+ es la acción integral y, 6D la constante. integral, que es igual a K ' E8D . El tiempo 8D se refiere al tiempo que tarda el controlador en duplicar la señal del error..
(30) 16. El método de discretización es el método trapezoidal. El cual consiste en dividir en partes o funciones en diferentes trapecios y luego sus áreas se suman. [4]. La ecuación discretizada tiene la siguiente forma matemática: :D [& ] = :D [& F G] , &' < )[& ] , &D < 8<. 3[H4-]I3[H] J. (1.7). Siendo :D [& F G] la suma del área de los trapecios anteriores, :D [&] el área que se desea calcular, 6D la constante integral del sistema, )[& F G] y )[& ] el error anterior. y actual, y 8 la distancia en tiempo entre ambos. [4]. Se aplica el operador de desplazamiento de la transformada Z se obtiene: :D [C] = &' < )[C] , &D < J < )[C]< -4L MN .. -IL MN. (1.8). Acción Derivativa En una acción derivativa la salida del controlador :D (*+ es proporcional a la velocidad de cambio de la señal del error )(*+, así: [4] :2 (*+ = &' < )(*+ , &2. 23(5+ 25. (1.9). Donde ) (*+ es la señal de error, :2 (*+ es la acción integral y, 62 la constante derivativa que es igual a 6' < *2 , el tiempo acción derivativa *2 anticipa la acción. proporcional. La discretización se realiza por la aproximación por diferencias finitas el cual dan resultados adecuados con un determinado error, la ecuación aproximada se define: O P (Q + R. S(TU +4S(TU 4V+ V. (1.10).
(31) 17. La ecuación (1.10) debe ser utilizada para la discretización, la acción derivativa tiene la siguiente forma: :2 [& ] = 6' < )[& ] , &2 <. 3[H]43[H4-] .. (1.11). Se aplica la transformada Z se obtiene: :2 [C] = &' < )[C] , &2 < )[C]<. 1.4.1.2.. -4L MN .. (1.12). PID Discreto.. Una vez obtenido las señales discretas de la acción proporcional, integral y derivativa se puede expresar la ecuación del controlador PID en discreto ecuación (1.13).. :2 [C] = )[C] W&' , &D < J <. . -IL MN -4L MN. , &2 <. -4L MN .. X. (1.13). Para poder implementar en el software de programación, se debe llevar a términos de muestras, usando los términos de desplazamiento de llega a la siguiente ecuación: :2 [C] =. bNM`MN c \ N_`MN IHa < ^ NM`MN \. 3 [L]YHZIH/ < <. -4L MN. ^. d. (1.14). Resuelta la ecuación y aplicando a transformada Z inversa se obtiene la siguiente ecuación:. :[&] F :[& F G] = &' < ()[&] F )[C F G]+ , &D < 8<. 3[H]I3[H4-] J. , &2 <. 3[H]4J3[H4-]IJ3[H4J] .. (1.15). Se expresa la ecuación (1.15) de la siguiente manera: :[&] = :[& F G] , )[&]eW&' ,. H/ . J. ,. Ha .. X , )[& F G]eWF&' ,. H/ . J. F. JHa .. X , )[& F f] eW aX (1.16) H. ..
(32) 18. En la ecuación (1.15), se observan tres constantes que multiplican al error, estas. constantes las nombran como :-eg :Jeehee:" y la ecuación queda expresada de la siguiente manera: : [& ] = : [& F G] , )[& ]< :-e , )[& F G]< :Je , )[& F f]< :"e. (1.17). Donde : [& ] es la salida del PID discreto, : [& F G] es la salida anterior )[& ]g. )[& F G]ehe)[& F f] son los errores en la muestra actual, en la anterior y dos muestras atrás. [4]. 1.4.1.3.. Sintonización para Controladores PID. A partir de las mediciones realizadas sobre valores de la planta, se aplican estos. métodos para estimar los parámetros 6; es la constante proporcional, 89 es el. tiempo integral y 82 es el tiempo derivativo.. Métodos basados en la curva de reacción de Ziegler - Nichols. Los parámetros de este modelo se pueden obtener con un experimento en lazo abierto. Manualmente llevar a la planta a un punto de salida que permanezca en h(*+ = hi. para una entrada a la planta constante j(*+ = ji . En un instante inicial *i , se aplica un cambio escalón a la entrada de la planta este puede ser del 10% al 20% del total del escalón, y se registra datos hasta que se estabilice en un nuevo punto de operación [5], Figura 1.18.. Calcular los parámetros del modelo como sigue: 6k = nm 4nU l 4l m. U. oi = *- F *i. (1.18) (1.19).
(33) 19 pi = *J F *-. (1.20). Figura 1.18. Curva de reacción de la planta en lazo abierto. [5]. Los parámetros obtenidos los parámetros se establece las formulas de la tabla 1.2. Tabla 1.2. Parámetros de controladores PID, método de la curva de reacción de Ziegler-Nichols. [5]. Controlador P PI PID. Kp. Tr. qgrpi 6i oi. soi. pi 6i oi. Ggfpi 6i oi. foi. Td. qgtoi. Método de oscilación de Ziegler – Nichols (Z-N). Este método primero establecemos la acción proporcional, desde 0 hasta que la salida empiece a oscilar, registrar la ganancia crítica 6; = 6' del controlador y el. período de oscilación de la salida del controlador #' [5]. Establecer los parámetros según la Tabla 1.3..
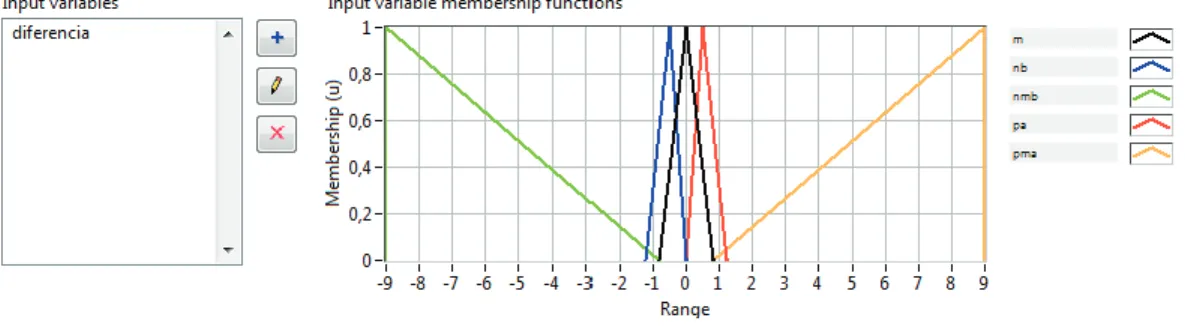
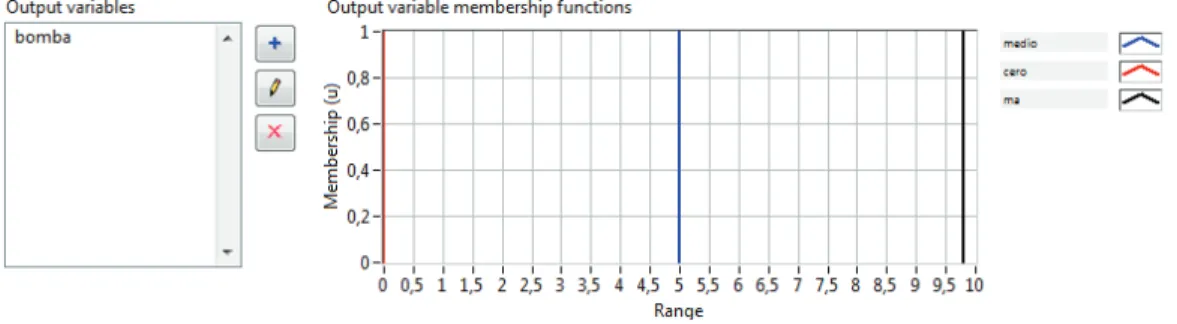
(34) 20. Tabla 1.2. Parámetros de controladores PID, método de oscilación de ZieglerNichols. [5] 6;. 8D. 82. P. 0.56'. 0. 0. PI. 0.456'. 0.8#7. 0. PID. 0.66'. 0.5#7. 0.125#7u. Tipo de controlador. 1.4.2. LÒGICA DIFUSA. La incorporación de lógica difusa dentro de los sistemas de control, se puede encontrar dos grandes áreas, el modelado y el control directo.. Se trata de determinar de manera lógica, que se debe hacer para lograr los objetivos de control de mejor manera posible a partir de una base de conocimiento proporcionada por un operador humano, sin esta base no es posible desarrollar una aplicación y que esta funcione de manera correcta.. Se utiliza el conocimiento y experiencia de un operador humano para construir un controlador que emule el comportamiento de tal persona. Comparado con el control tradicional, el control difuso tiene dos ventajas prácticas, una es que el modelo matemático del proceso a controlar no es requerido y otra es que se obtiene un controlador no lineal desarrollado empíricamente sin complicaciones matemáticas. [6]. 1.4.2.1.. Teoría de los Conjuntos Difusos. Los conjuntos difusos toman valores de [0,1] mientas el conjunto esté más cerca del 1 mayor es la pertenencia del objeto. Los conjuntos difusos se pueden precisar únicamente dando su función de pertenencia. [6].
(35) 21. La función de pertenencia puede emplearse de dos formas diferentes:. -. La primera para saber opciones de pertenencia a un conjunto difuso, se toma en cuenta el siguiente ejemplo. Ejemplo: Si mi estatura es de 150cm, ¿en qué rango es alto?. -. La segunda para expresar opciones en una situación en la que no se tiene la información completa. Ejemplo: Si nos informan que una persona es pequeña, ¿Cuál será su altura?, la función de pertenencia puede tener varias opciones que puede indicar la pertenencia sobre valor desconocido.. 1.4.2.1.1.. Conjuntos Clásicos. Los conjuntos se manifiestan en funciones de pertenencia por ejemplo µ que pueden ser valores de 0 ó 1, es decir no tienen valores intermedios. [6]. En la ecuación (1.21), se pude observar cómo se define la función de pertenencia. eeevw(Q+ = xqe?9eQe y w Ge?9eQe z w 1.4.2.1.2.. (1.21). Conjuntos Difusos. La función de pertenencia, tiene un número real 0 y 1. Un conjunto o subconjunto borroso se le da un valor lingüístico ya sea por una palabra o etiqueta lingüística.. La función de membresía denominada v{(Q+ hay que definir por cada conjunto, la. variable Q está representado por la etiqueta w (q | v{ (Q+ } G+, si el valor 0, Q no. está incluido en w y si el valor 1, Q está incluido en w. [6] w = e ~(Qg v{ (Q++Q. (1.22).
(36) 22. 1.4.2.2.. Funciones de membresía. Las funciones de membresía o pertenencia, representan el grado de pertenencia de un elemento a un subconjunto definido por una etiqueta. Las funciones de membresía más comunes son del tipo triangular, S, trapezoidal y singleton.. Forma Triangular. Definida mediante el límite inferior a, el superior b y el valor modal m, tal que a<m<b, Figura. 1.19. La función no tiene porqué ser simétrica. [6]. w (Q + =. eeeeeeeqeeeeeeeeeeeeeeeeeeeeeee?9eeeeeeQ | eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<fs+ ( Q F + (! F + eeee?9eeeQ z (g !]eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<f+ . ( F Q + ( F !+ eeee?9eeeQ z (!g +eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<ft+ eeeeeeeGeeeeeeeeeeeeeeeeeeeeeee?9eeeeeeeeQ } eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<f+. Figura 1.19. Forma triangular. [6]. Forma S Definida por sus límites inferior a, superior b y el valor m o punto de inflexión, tales que a<m<b, Figura. 1.20. El crecimiento es más lento cuanto mayor sea la distancia a-b. Para el caso concreto de ! = siguiente gráfica. [7]. (I+ J. , que es lo usual, se obtiene la.
(37) 23. w (Q + =. eeeeeeeeeqeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee?9eeeeeeQ | eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<f+ ( f~ Q F + ( ] ( F +J eeeeeeeeee?9eeeQ z g ! eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<f+ . G F f~(Q F + ( F +J eeee?9eeeQ z (!g +eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<fr+ eeeeeeeeGeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee?9eeeeeeeeQ } eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<sq+. Figura 1.20. Forma S. [7]. Forma Trapezoidal. Definida por sus límites inferior a, superior d, y los límites de soporte inferior b y superior c, Figura. 1.21, tal que a<b<c<d. [6] eeeeeeeqeeeeeeeeeeeeeeeeeeeeeee?9eeeeeeQ | eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<sG+ ( Q F + ( F + eeeeee?9eeeQ z [g ]eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<sf+ . w(Q + = eeeeeeeeeeeeeeeGeeeeeeeeeeeeeeeeeeeeee?9eeeeeQ z [g 7 ]eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<ss+eeee (1 F Q + (1 F 7 + eeee?9eeeQ z [7g 1 ]eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<s+ e. Figura 1.21. Forma trapezoidal. [6].
(38) 24. Forma singleton. Función de pertenencia llamada un singleton, tiene un valor único cuando x = a Figura 1.22, (es como una función delta de Dirac). [7]. eeeeeGeeeeeeeeeeeeeeeeee?9eeeeeeQ = eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<st+ w (Q + = eeeeqeeeeeeeeeeeeeeeeee?9eeeeeeQ eeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeee(G<s+. Figura 1.22. Forma singleton. [7]. 1.4.2.3.. Controlador Difuso. Como se muestra en la Figura 1.23., está constituida por tres bloques: el de transformación de los valores numéricos en valores de lógica difusa, la inferencia que emplea las reglas, el bloque de conversión de los valores de la lógica difusa en valores numéricos. [6]. Figura 1.23. Sistema Difuso..
(39) 25. Fusificación. El control difuso siempre involucra este proceso de Fusificación, es un procedimiento matemático en el que se convierte un elemento del universo de discurso (variable medida del proceso) en un valor en cada función de membresía a las cuales pertenece [6], como se muestra en el ejemplo de la Figura. 1.24.. Figura. 1.24. Ejemplo de Conjuntos Difusos. [6]. Inferencia La inferencia es el que nos permite interpretar las reglas de un grupo de reglas y que nos permite obtener los valores de salida. [6] Existen tres métodos de inferencia de los controladores difusos y son: Método de Mamdani, Sugeno y Tsukamoto. Método de Inferencia de Mamdani.. En método de Mamdani se utiliza reglas donde se tiene un antecedente y un consecuente, estas reglas están dadas por expresiones lingüísticas, como se observa en la Figura. 1.25. [8].
(40) 26. Figura 1.25. Método de Inferencia de Mamdani. [8]. Método de Inferencia de Sugeno.. Un sistema Sugeno la base de reglas es diferente a los sistemas de Mamdani ya que el consecuente es una función de la entrada del sistema, como se muestra en la Figura.1.26. Los datos que se obtiene a la salida son valores por lo que no es necesaria una etapa de defusificación. [8]. Figura 1.26. Método de Inferencia de Sugeno. [8]. Método de Inferencia de Tsukamoto.. En este modelo la función consecuente es un set difuso con una función monotonica. La salida de cada regla se define como un valor exacto inducido por la fuerza de disparo de cada regla. Cada regla tiene una salida exacta. A diferencia del método de Mandani, este método no necesita defusificación ya que agrega las salidas exactas de cada regla usando el promedio ponderado. [8]. Ejemplo: If la entrada1 es baja and entrada2 es muy baja then la salida is muy baja..
(41) 27. Reglas. Las reglas describen, en palabras, las relaciones entre la entrada y la salida lingüísticas basadas en sus términos lingüísticos. Por ejemplo, puede definir la siguiente regla: IF la temperatura actual es fría AND la temperatura deseada es moderada, THEN el ajuste del calentador es bajo.. Las cláusulas "temperatura actual es fría" y "temperatura deseada moderada" son los antecedentes de esta regla. La conectividad AND especifica cómo el controlador de lógica difusa relaciona los dos antecedentes para determinar el valor de verdad para el antecedente de la regla agregada. La cláusula "ajuste del calentador es baja" es el consecuente de esta regla. Una base de reglas es el conjunto de reglas para un sistema difuso. La base de reglas es equivalente a la estrategia de control del controlador. [9]. Defusificación. La defusificación convierte el rango de pertenencia de variables lingüísticas en valores numéricos nítidos. [9]. Los métodos más comunes de Defusificación son:. Ø Centro de Área (CoA): También llamado método del Centro de Gravedad (CoG), el controlador difuso calcula primero el área bajo las funciones de pertenencia escaladas y dentro del rango de la variable de salida. El método de defusificación del Centro de Área calcula eficazmente el mejor compromiso entre términos lingüísticos de salida múltiple. [9]. Ø Centro del Área Modificado: El método de defusificación del Centro de Área modificado es similar al método de defusificación del Centro de Área. Sin embargo, el controlador de lógica difusa considera el área completa bajo.
(42) 28. las funciones de pertenencia escaladas, incluso si esta área se extiende más allá del rango de la variable de salida. El intervalo de integración está entre el valor mínimo de la función de pertenencia y el valor máximo de la función de pertenencia. [9] Ø Centro de Sumas (CoS): El controlador de lógica difusa calcula primero el centro geométrico del área para cada función de pertenencia. [9] Ø Centro de Máximo (CoM): El controlador de lógica difusa determina primero el valor numérico típico para cada función de pertenencia escalada. El valor numérico típico es la media de los valores numéricos correspondientes al grado de pertenencia a la cual se escaló la función de pertenencia. El método de defusificación CoM es idéntico al método CoA con funciones de pertenencia singleton. Los métodos de defusificación CoM y CoA usualmente se aplican a los controles de bucle cerrado de lógica difusa. Estos métodos suelen dar como resultado señales de salida continuas porque un pequeño cambio en los valores de entrada no cambia el mejor valor para la salida. [9] Ø Media de Máximo (MoM): Este método de defusificación calcula el resultado más aceptable. En lugar de promediar los grados de pertenencia a los términos lingüísticos de salida, el método de defusificación MoM selecciona el valor típico del término lingüístico de salida más válido. [9].
(43) 29. CAPÍTULO 2 IMPLEMENTACIÓN DE HARDWARE En este capítulo se describe la implementación y ventajas del módulo de FESTO didactic, también se detalla los esquemas de control para las variables de nivel y caudal.. Para la implementación del módulo de procesos de FESTO se toma en cuenta elementos mecánicos, actuadores y sensores (descritos en el Capítulo 1), los elementos necesarios que permiten realizar en lazo cerrado el control de variables independientemente; se toma en cuenta el montaje de tanques, tuberías, sensores y actuadores, la tubería es de acople rápido y los accesorios como codos y uniones son de las mismas características, se monta el sensor de ultrasonido en la parte superior del tanque B102 y el sensor de caudal luego de la Bomba centrífuga, los elementos como sensores de flotador se encuentran dentro de los tanques.. Se toma en cuenta la alimentación de elementos de 24 Vdc y las entradas a los conectores digitales, así como también las entradas análogas de los sensores y la salida de válvula proporcional.. 2.1.. IMPLEMENTACIÓN DE LA PLANTA. 2.1.1. FUNCIONAMIENTO DEL SISTEMA. Como se puede observar en la Figura. 2.1., los sistemas de regulación nivel y caudal de la Estación Compacta pueden funcionar individualmente.. La distribución de los sensores y actuadores, permiten la experimentación tanto con reguladores del tipo de acción continua (p. ej. P, I, PI, PID) como los de acción discontinua (p. ej. reguladores de 2 puntos). La bomba puede ser.
(44) 30. controlada directamente trabajando al 100 % ó funcionar de forma controlada de 0 – 10 V.. Para cada uno de los controladores es necesario configurar las válvulas manuales de tal manera que el flujo del fluido tenga la dirección adecuada. Para el control de nivel vamos a tomar en cuenta el tanque superior B102 y el tanque inferior B101.. Para el control de caudal recirculamos el fluido por el tanque B101 (reservorio). Para cambiar la estabilidad (perturbaciones) del sistema se ha incluido en la implementación dispositivos como la válvula de Bola y la válvula proporcional.. En el caso del control de caudal se realiza cambios en la variable actuando sobre la válvula proporcional permitiendo un mayor caudal en la tubería.. Para el control de nivel se cuenta con una válvula de bola con accionamiento neumático se halla dispuesta en el retorno entre el depósito de nivel superior y el de nivel inferior. El accionamiento neumático puede utilizarse para simular una carga que provoque una perturbación en el sistema de regulación del nivel, o como válvula de cierre para una desconexión de emergencia. [2]. Figura. 2.1. Sistema de Nivel y Caudal FESTO Didactic..
(45) 31. 2.1.2. DIAGRAMA DE CONTROL DEL SISTEMA. En el esquema de la Figura. 2.2., se puede visualizar los elementos necesarios para el funcionamiento del módulo, dos tanques de 10 Litros, la bomba P101, puede funcionar de manera digital o análoga (0 – 10 V) y es la que permite realizar el control de nivel o caudal. El sistema de tuberías y llaves permite llevar el agua por diferentes tramos del sistema, la correcta selección de llaves configura al sistema para trabajar en lazo de control para la variable de nivel o la variable de caudal de manera independiente.. LIC B101. V102. LS + S112. B102. V 104. V 112. LS + S114. V109. V.201. B101 V 110 LS B113. V 101. V 106. V 103. FIC B102. P101. V 105. Figura 2.2. Esquema de Implementación Sistema de Nivel y Caudal FESTO Didactic. [2]. 2.1.2.1.. Sistema de control de nivel. En el esquema de la Figura. 2.3., la bomba P101 suministra un fluido desde un depósito de almacenamiento B101 a un depósito B102 a través de un sistema de tuberías..
(46) 32. El nivel del fluido dentro del depósito B102 se controla con un sensor analógico ultrasónico B101 en el punto de medición 'LIC B101' y se lee como valor real. El valor real debe mantenerse en un cierto nivel también si se producen alteraciones o cambios en el punto de ajuste.. Para la perturbación es posible abrir / cerrar la válvula de bola V102 en conjunto con la llave manual V112 de forma parcial o totalmente para drenar la parte superior en el tanque inferior o abrir / cerrar la válvula manual V104, la cual provoca una mayor descarga por tener mayor presión en la parte inferior del tanque B102. [2]. LIC B101. LS + S112. V102. B102 V 104. V 112. LS + S114. V-201. B101 V 110 LS -. V101. B113. FIC B102. P101. V105. Figura. 2.3. Esquema de Implementación del sistema de control de nivel.. 2.1.2.2.. Sistema de control de caudal. En el esquema de la Figura. 2.4., el agua se almacena en el tanque B101, el control de flujo se lleva a cabo por el sensor B102, la bomba P101, lleva el agua hacia la válvula proporcional V106, la cual la devuelve al tanque B101 a través de la válvula V109, la bomba P101 regula el flujo que circula en el sistema, el sensor.
(47) 33. de flujo FIC B102 es quien nos permite visualizar el flujo de agua que entra en el tanque B101, la perturbación al sistema se realizan por medio de las válvulas manuales V106 (válvula proporcional), V104 y V109. V104. LS + S114. V109. B101 RESERVORIO. LS B113. V 106. V103. FIC B102. P101. V105. Figura. 2.4. Esquema de Implementación del sistema de control de caudal. [2]. 2.1.3. CONEXIONES ELÉCTRICAS Y ACONDICIONADORES.. Para recoger las diferentes señales digitales y analógicas se ha concentrado el cableado en borneras de conexión de tal forma que permita tener acceso a las señales de sensores y actuadores, la disposición de los conectores se ha distribuido como se muestra en la Figura. 2.5.. Figura. 2.5. Placa de conexión Entradas y Salidas..
(48) 34. Se detalla las partes de la placa de conexión detallada a continuación:. 1 Placa de montaje 2 Terminal de E / S (estación Syslink): Conexión de entradas, para el sensor capacitivo de proximidad y conexión de salidas y entradas digitales. 3 Terminal analógico: Conexión analógica de los valores de nivel, caudal, salida analógica de la bomba y válvula proporcional. 4 Relé K1: Control de la bomba. Si K1 está activo, la bomba puede ser controlada con una tensión continua de manipulación de 0-10V. 5 Relé de potencia K106: Potencia de activación electrónica de la válvula proporcional. 6 Controlador de motor: control binario y analógico de la bomba. 7 Limitador de corriente: limita la corriente de arranque máxima del controlador del motor para evitar caídas de tensión en el controlador. [2] 2.- Terminal de E / S: El terminal SYSLINK (nombre que utiliza FESTO) XMA1 Figura. 2.6., permite concentrar (8) entradas/ (8) salidas digitales, y llevarlas mediante un cable SYSLINK a la tarjeta de adquisición de datos. [3]. Figura. 2.6. Terminal SYSLINK. [3]. 3.- Terminal analógico: Para las entradas análogas X2 Figura. 2.7., se utiliza un conector hembra de 15 Pines en el cual permite la conexión de 4 entradas / 2 salidas análogas, se llevan las señales análogas a través de un cable de 15 pines. [3].
(49) 35. Figura. 2.7. Terminal Analógico. [3]. Los dispositivos a instalar requieren de un tipo de señal para su correcto funcionamiento, las señales se detallan en la Tabla. 2.1. Tabla. 2.1. Señales del módulo didáctico No 1 Bomba. Elemento. Tipo Valor Análogo / Digital 0-10V / 0/24V. 2. Sensor de Ultrasónico. Análogo. 0 - 10V. 3. Sensor de caudal + Acondicionador f/V. Análogo. 0 - 10V. 4. Electrovàlvula Proporcional. Análogo. 0 - 10V. 5. Sensor Capacitivo. Análogo. 0 - 24V. 6. Sensor Flotador. Digital. 0/24V. 7. Vàlvula de Bola. Digital. 0/24V. 8. Relé K1. Digital. 0/24V. 9. Relé K106. Digital. 0/24V. 4.- Relé K1: La bomba es accionada por el controlador del motor A4 y el relé K1 Figura 2.8. Con una salida digital (O2 en XMA1) es posible pasar de control binario digital a variable de control analógico de 0 a 24 V. En el control binario digital (O2 = 0) la bomba se enciende / apaga con una salida adicional (O3 En XMA1). En el control analógico (O2 = 1) la tensión de accionamiento desde el canal de señal de salida analógica 0 (UA1 en X2) está ajustando la velocidad de la bomba de 0 a 10 V. [3]. Figura 2.8. Relé de conmutación. [3].
(50) 36. 5.- Relé de potencia K106: El control electrónico de la válvula proporcional se activa con una salida binaria (O4 en XMA1). Una señal analógica del canal 1 (UA2 en X2) está activando la entrada de señal de la válvula proporcional con una señal analógica estándar de 0 a 10 V. La señal analógica estándar se transforma en una modulación de ancho de pulso (PWM) realizada por el relé de potencia Figura 2.9., y la apertura de la válvula es ajustable. [3]. Figura 2.9. Relé de Potencia. [3]. 6.- Controlador de motor: Este regulador garantiza la conexión / desconexión segura del motor. Cuando esta desconectado, se activa el freno dinámico. La amplificación IxR puede ajustarse mediante un puente entre GND y el borne 3 o el borne 4 del controlador [3], Figura 2.10.. Figura 2.10. Controlador del motor. [3]. 7.- Limitador de corriente: La corriente es máximo 2A en el momento de conectar la corriente eléctrica. El módulo funciona como un relé. Al circuito de la Figura 2.11., que incluye este módulo únicamente pueden conectarse unidades que tienen un consumo de corriente estática de máximo 1A. El. efecto de.
(51) 37. limitación de corriente no debe utilizarse con el fin de limitar constantemente la corriente consumida por una unidad consumidora. [3]. Figura. 2.11. Circuito Limitador de corriente de arranque. [3]. 2.1.4. TARJETA DE ADQUISICIÓN DE DATOS EASY PORT. Las señales obtenidas de sensores son llevadas a la tarjeta de adquisición de datos EASY PORT, Figura 2.12., y estos a su vez son llevados a la PC a través de un cable USB, la tarjeta cuenta con Active X para ser controlada por Labview, C++ ó Visual Basic. El EasyPort está formado por las siguientes partes que se detallan a continuación:. 1.. Conector Sub D.. 2.. Conexión USB. 3.. Interfaz RS232.. 4.. Conexión de alimentación.. 5.. Teclas de dirección.. 6.. Led de Status. 7.. Led de error. 8.. Dos zócalos syslink. 9.. Leds de estado de las salidas digitales. 10.. Leds de estado de las entradas digitales. 11.. Pantalla LCD.
(52) 38. Figura 2.12. Tarjeta de adquisición de Datos. [10]. Datos técnicos. ·. Fuente de alimentación de 24 V a través de bornes atornillados separados o a través de un conector SysLink.. ·. Interface al PC (separación galvánica): USB 2.0, RS 232. A través de un hub USB pueden conectarse hasta 4 módulos. Velocidad de transmisión: 115 kBaud.. ·. Interface analógica: conector SUB D, 15 contactos, resolución 12 bit, 4 entradas analógicas/2 salidas analógicas, frecuencia de exploración: 0,5 kHz.. ·. Interface digital: 16 entradas digitales/16 salidas analógicas en 2 conectores Centronic de 24 contactos cada uno con 8 entradas digitales (24 V), 8 salidas digitales (24 V). Fuente de alimentación de 24 V. Representación de las señales digitales a través de LED.. ·. Display LCD grande, representación de canal, unidad, tendencia y valor medido (4 caracteres). Selección del canal visualizado y de la unidad mediante las teclas.. ·. Controlable mediante ActiveX Control de Labview, C++ o Visual Basic..
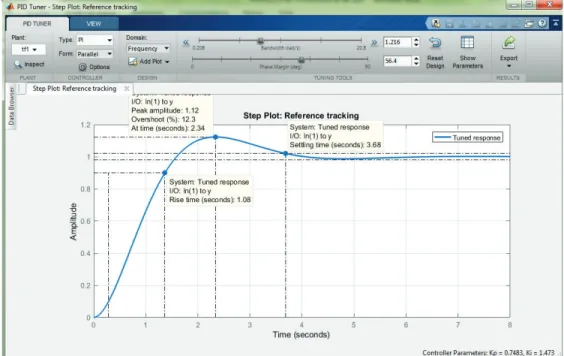
(53) 39. CAPÍTULO 3 DESARROLLO DEL SOFTWARE En esta parte se va a describir brevemente lo realizado en el programa Labview para el desarrollo de la interfaz, como realizar el modelamiento de la planta para la variable de caudal y la sintonización del PID usando la curva de reacción para la variable de nivel.. Para la implementación del controlador PID y Lógica Difusa se utilizó herramientas en el programa Labview; se desarrollaron los algoritmos de PID y Lógica Difusa y se ingresaron señales digitales y analógicas a través de la tarjeta de adquisición de datos Easy Port que dispone de los controles Active X para Labview. Una vez instalado los drivers del USB del easy port, se configura en el programa Labview la apertura y cierre del puerto de comunicación, se coloca los iconos respectivos de comunicación para entradas y salidas digitales y analógicas en los lazos respectivos y se muestra de forma gráfica las variables de interés como son referencia y el sensor de acuerdo a la variable a medir.. 3.1. DISEÑO E IMPLEMENTACIÒN DE LOS CONTROLADORES PID DE LAS VARIABLES DE NIVEL Y CAUDAL. Para realizar los diseños de los controladores de PID, primero identificar las variables de entrada y salida del sistema, los rangos de trabajo conocer la respuesta de la planta para obtener un buen rendimiento de los controladores.. 3.1.1. MODELAMIENTO E IMPLEMENTACIÓN DEL CONTROLADOR PID DE NIVEL Para modelar la planta se pueden emplear las ecuaciones que definen el sistema o utilizar herramientas computacionales que dispone Matlab para identificar un modelo, con la ayuda del Labview, Excel y Matlab se obtuvo la tabla de datos de.
(54) 40. la entrada y salida que describen el comportamiento dinámico en lazo abierto, con los datos obtenidos se utiliza el programa Matlab con la herramienta “System Identification” para estimar la función de transferencia en tiempo discreto, posterior utilizando la herramienta “PID tuner” en Matlab se puede estimar el valor de los parámetros del controlador. 3.1.1.1.. Modelamiento para el Control de Nivel.. Para estimar la función de transferencia del sistema para la variable nivel, se obtiene valores de entrada (voltaje - bomba) y salida (nivel - sensor ultrasónico) en lazo abierto Figura 3.1.. Figura. 3.1. Curvas de Entrada voltaje y Salida nivel en lazo abierto.. Para obtener el modelamiento de la planta se usa la plataforma de Matlab, se importa los datos a Workspace y mediante la herramienta “System Identification”, me permite cargar, ejecutar y estimar el proceso. Con estos datos se realiza varias estimaciones, para poder determinar la mejor estimación, se debe tomar la que tenga un porcentaje de aproximación mayor al 85%.. Tomando en cuenta lo anteriormente mencionado se obtiene las siguientes funciones de transferencia:.
(55) 41. 1) Polos: 1 ; Zeros: 1 Tf1 = From input "u1" to output "y1": 0.001928 z^-1 --------------1 - 0.9979 z^-1 Name: tf3 Sample time: 0.01 seconds Discrete-time identified transfer function. Parameterization: Number of poles: 1 Number of zeros: 1 Number of free coefficients: 2 Use "tfdata", "getpvec", "getcov" for parameters and their uncertainties. Status: Estimated using TFEST on time domain data "mydata". Fit to estimation data: 24.4% (simulation focus) FPE: 4.377, MSE: 4.373. 2) Polos: 2 ; Zeros: 1. tf2 = From input "u1" to output "y1": 6.718e-06 z^-1 ---------------------------1 - 1.997 z^-1 + 0.9972 z^-2 Name: tf1 Sample time: 0.01 seconds Discrete-time identified transfer function. Parameterization: Number of poles: 2 Number of zeros: 1 Number of free coefficients: 3 Use "tfdata", "getpvec", "getcov" for parameters and their uncertainties. Status:.
(56) 42. Estimated using TFEST on time domain data "mydata". Fit to estimation data: 23.89% (simulation focus) FPE: 4.436, MSE: 4.432. 3) Polos: 2 ; Zeros: 2 Tf3 = From input "u1" to output "y1": 0.00107 z^-1 - 0.001066 z^-2 ---------------------------1 - 1.998 z^-1 + 0.9982 z^-2 Name: tf4 Sample time: 0.01 seconds Discrete-time identified transfer function. Parameterization: Number of poles: 2 Number of zeros: 2 Number of free coefficients: 4 Use "tfdata", "getpvec", "getcov" for parameters and their uncertainties. Status: Estimated using TFEST on time domain data "mydata". Fit to estimation data: 37.04% (simulation focus) FPE: 3.038, MSE: 3.033. Como se puede observar los datos de las funciones de transferencia obtenidas no tienen un valor de porcentaje de estimación alta, sino se encuentra en un rango del 24% al 37%, valores que son muy bajos para considerar una función de transferencia aproximada. En la Figura 3.2, se puede observar que ninguna de las funciones de transferencia estimadas se aproxima a la señal tomada de la planta..
(57) 43. Figura. 3.2. Señal tomada de la planta en lazo abierto vs Funciones de Transferencias estimadas.. Para obtener el modelo matemático de la planta, se toma en cuenta la aplicación de técnicas de diseño para poder definir los parámetros adecuados del controlador, que cumplan con las especificaciones en estado estable y transitorio de la planta en lazo cerrado, si la planta es difícil de obtener su modelo matemático y realizar un análisis matemático para el diseño de un controlador PID, entonces se debe aplicar la sintonización de Ziegler y Nichols. [11]. La sintonización de Ziegler y Nichols sugirieron reglas para sintonizar los controladores PID, dichas reglas se detallan en el Capítulo 1, estas reglas son aplicables cuando no se conocen los modelos matemáticos de las plantas. [11]. 3.1.1.2.. Sintonización para el Control de Nivel.. Para la siguiente función de transferencia, en lazo abierto se define:. eeeeek (?+ =. 3 M BI-. donde i q. (3.1). Donde los coeficientes 6k , ok ey pk , se obtiene de la respuesta del sistema en lazo abierto a una entrada escalón. Manualmente llevar a la planta a un punto de.
Figure
![Tabla 1.1. Datos técnicos del módulo FESTO Didactic. [1]](https://thumb-us.123doks.com/thumbv2/123dok_es/3173923.578633/16.918.219.730.260.650/tabla-datos-técnicos-módulo-festo-didactic.webp)
![Figura 1.18. Curva de reacción de la planta en lazo abierto. [5]](https://thumb-us.123doks.com/thumbv2/123dok_es/3173923.578633/33.918.309.654.114.403/figura-curva-reacción-planta-lazo-abierto.webp)
![Figura 1.21. Forma trapezoidal. [6]](https://thumb-us.123doks.com/thumbv2/123dok_es/3173923.578633/37.918.184.550.116.478/figura-forma-trapezoidal.webp)
![Figura 2.2. Esquema de Implementación Sistema de Nivel y Caudal FESTO Didactic. [2]](https://thumb-us.123doks.com/thumbv2/123dok_es/3173923.578633/45.918.235.645.411.793/figura-esquema-implementación-sistema-nivel-caudal-festo-didactic.webp)
+7



Documento similar
[r]
En este sentido, hemos considerado que el aprendizaje basado en problemas reúne algunas propiedades ligadas al desarrollo curricular y a la perspectiva
En cuarto lugar, se establecen unos medios para la actuación de re- fuerzo de la Cohesión (conducción y coordinación de las políticas eco- nómicas nacionales, políticas y acciones
[r]
[r]
SECUNDARIA COMPRENDE LOS
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
En cada antecedente debe considerarse como mínimo: Autor, Nombre de la Investigación, año de la investigación, objetivo, metodología de la investigación,
