Modelagem do Acionamento de Motores de
Indução Usando Longos Cabos
Antonio Carlos S. Lima
Departamento de Planejamento da Transmissão
Furnas Centrais Elétricas S&A
Rua Real Grandeza 219, bloco C
sala 1607.3 Rio de Janeiro
22283-900 RJ Brazil
[email protected]
Abstract
This papers deals with the modelling of a power electronic system inEMTP. The sys-tem is a adjustable speed drive with a long feeder connecting motor and drive. This a special drive system, more commonly found in oil or mineral applications. Despite the peculiar val-ues of the system parameters the models developed are general enough and can represent other system with similar caracteristics. In fact, all the models use standardEMTPadapted to represent the skin effect in the cable and the variation in the rotor inductance. Experi-mental results obtained in an actual drive system together with some prototype systems are used to validate the modelling.
Resumo
Este artigo lida com a modelagem de um sistema de eletrônica de potência noEMTP. É um sistema de acionamento à velocidade variável com um longo alimentador conectando o motor e o variador de feqüência. Este é um sistema de acionamento atípico, mais comu-mente encontrado em aplicações da indústria petrolífera ou mineral. Apesar dos valores peculiares para os parâmetros do sistema, os modelos apresentados são gerais o suficiente para representar sistemas com características semelhantes. De fato, todos os modelos uti-lizam elementos típicos do EMTPadaptados para a representação do efeito pelicular no cabo e da variação na indutância rotórica. Resultados experimentais obtidos num sistema reais e protótipos são usados para validar a modelagem.
1
Introdução
integram o sistema de transmissão no Brasil e no mundo. No país, atualmente, encontram-se operando diversos reatores controlados a tiristores, dois capacitores-série controlados a tiristor e um sistema de HVDC. Contudo o uso de eletrônica de potência não se restringe apenas a área de transmissão, nos sistemas industriais está se tornando cada vez mais comum o uso de con-versores de freqüência que visam a operação dos motores elétricos em uma faixa de freqüência mais ampla.
Um conversor de freqüência aplicado ao acionamento de motores recebe o nome de “Adjus-table Speed Drive” (ASD) ou “Variable Speed Drive” (VSD). O ASD permite uma operação mais flexível do motor, acima e abaixo da velocidade nominal. No processo, são gerados harmônicos que devem ser analisados, e esta análise demanda uma modelagem detalhada de cada componente a fim de avaliar corretamente o desempenho global do sistema. Os harmô-nicos do conversor podem produzir diversos fenômenos indesejáveis como: interferência ele-tromagnética em outros equipamentos, efeitos torsionais no eixo do motor, super-aquecimento, ressonância mecânica no eixo e fadiga mecânica.
2
Descrição do Sistema
Praticamente todos os sistemas de acionamento industriais possuem um alimentador conec-tando motor e conversor. Quando um longo alimentador está envolvido no sistema de acio-namento, alguns fenômenos não esperados podem ocorrer. O alimentador aumenta o conteúdo harmônico na tensão e na corrente. Interações entre o alimentador e o inversor geram oscilações de tensões no motor e podem até criar ressonâncias no sistema. Dependendo das características do acionamento estas oscilações podem danificar os enrolamentos estatóricos. Os harmônicos ainda são responsáveis pelo aumento de temperatura no cabo e no motor, e por um decréscimo na eficiência total.
Os acionamentos usados na exploração de petróleo, na mineração e na indústria de papel normalmente operam com cabos com comprimentos quilomêtricos. O caso crítico encontra-se nos sistemas de mineração e de petróleo, onde o alimentador pode chegar a dezenas de quilômetros. Por exemplo, é provável que, em futuro próximo, ASD´s com mais de 20km de cabos elétricos sejam instalados em sistemas petrolíferos.
Nos países que desenvolvem a prospecção em águas profundas, o sistema de acionamento submarino consiste no uso de bombas submersas diretamente conectadas ao poço. Um pro-blema peculiar neste tipo de sistema é a sua inacessibilidade [1]. Após instalado, o motor, seus terminais e suas conexões com o cabo elétrico não podem ser acessadas, a não ser por necessidade de intervenção, o que implica em parada de produção.
A Fig. 1 mostra os componentes básicos do sistema. Atualmente, conversores de média tensão possuem um transformador elevador, uma vez que as chaves semicondutoras dos con-versores são, normalmente, de baixa tensão.
3
Modelo do Cabo Elétrico
Electric Cable I.M.
v
i
i v
Figura 1: Topologia Básica do Sistema
até 1000 metros para alimentar os motores de indução que acionam as bombas de petróleo. Estes cabos são a parte mais cara em um sistema de bombeamento de petróleo, independentemente dele possuir ou não um ASD.
O comprimento do cabo elétrico para poços com até 100m de lâmina d´água é superior a 1km, basicamente devido à distância entre o poço e a plataforma. Já em águas ultra profundas, com lâmina d´água superior ou igual a 1000m, este comprimento pode chegar a dezenas de quilômetros, dependendo da localização do poço e da plataforma. O longo comprimento do cabo contribui para o amortecimento das oscilações de alta freqüência (ringing) nos terminais do motor. Estas oscilações são causadas pela excitação do cabo com tensões chaveadas (não senoidais). Devido à elevada capacitância (distribuída) existente no cabo, o uso de conversores de freqüência pode também causar sobre-tensões, aumentando o desgaste da isolação no motor. Em sistemas de acionamento, os cabos mais comuns são os PTs(“pipe type”), tendo o XLPE ou EPR como isolador. Há situações em que o sistema possui o neutro isolado, como no caso dos sistemas de acionamento usados na exploração de petróleo. Porém, normalmente, o retorno pela terra é feito por um outro cabo, embora haja casos nos quais o quarto fio (fio de condução da corrente de seqüência zero) está contido na mesma tubulação que os condutores de fase.
Até a presente data, não há um modelo específico para cabos em nenhuma das versões do
EMTP. A informação sobre o cabo é adaptada a fim de representá-lo através dos modelos já existentes de linhas de transmissão aéreas. Cabos elétricos têm uma capacitância mais elevada e uma menor indutância em comparação com as linhas de transmissão aéreas. Em fenômenos transitórios, a impedância de surto e a velocidade de propagação no cabo são menores que as encontradas em uma linha de transmissão. A velocidade de propagação no cabo é, usualmente, em torno de metade da velocidade da luz (aproximadamente1:5210
8 m/s).
O comportamento de um cabo elétrico é completamente descrito pelas equações diferenciais de primeira ordem mostradas na eq.(1).
8
> > <
> > :
d _ V
dx
=(R+j!L) _ I
d _ I
dx
=(G+j!C) _ V
(1)
haja efeito coroa, a matriz Cé constante. Vale lembrar que ao contrário das linhas de trans-missão aéreas, os cabos costumam apresentar um valor desprezível de efeito coroa. Há ainda efeitos não lineares no caso de cabos elétricos em tubulações metálicas, que são ignorados neste trabalho. Efeitos não lineares não podem ser diretamente expressos nas equações no domínio da freqüência enquanto a dependência da freqüênciaa não pode ser diretamente expressa no domínio do tempo.
A solução das equações que descrevem o comportamento da eq.(1, em um programa no domínio do tempo, pode ser categorizada em:
Domínio modal
– Representação das funções transcendentais por funções racionais (fitting no domínio
da freqüência)[3];
Domínio de fase
– Representação diretamente no tempo contínuo das funções via transformada de
Fourier[4];
– Representação no tempo discreto, usando a transformadaz[5];
– Separação das perdas dependentes da freqüência da impedância característica do
cabo, usando um segmento sem perdas para representar a propagação de onda[6].
Uma forma de evitar todas as dificuldades envolvendo o cálculo das integrais de convolução necessárias para a solução do conjunto de equações envolvidas é a extensão do modelo de linha clássico a parâmetros constantes. Se ao invés de apenas uma resistência, usar-se um conjunto de RL´s em paralelo, formando uma rede dependente com a freqüência, a precisão do modelo pode ser extendida e implementada facilmente. Esta idéia foi usada por Castellanos et al. [6] para a representação de linhas de transmissão aéreas e é chamada de modeloZ
l ine. Este processo, além de simples e elegante, garante a estabilidade numérica de forma quase trivial. Além do mais, esta metodologia pode ser implementada em qualquer versão do EMTPsem uma mudança no código.
Referindo-se novamente à eq.(1), a matriz da impedância série Z (R+ j!L) apresenta elementos dependentes da freqüência que podem ser rescritos com:
z ij
(!)=r ij
(!)+j!(L ext ij
+L
ij
(!)); (2)
onde! é a freqüência,r
ij é a resistência do condutor, L
ext
ij é um valor constante de indutância associada ao fluxo externo, eL
ij
(!)é a indutância relacionada ao fluxo dentro do condutor e que varia com a freqüência . Se os termos dependentes da freqüência na eq.(2) são reagrupados, ela pode ser reescrita como:
Z=Z l oss
+j!L ext
(3)
onde
z l oss ij
=r ij
(!)+j!L ij
Z
lossL
extC
Figura 2: Modelo de Cabo
As matrizes associadas aos campos externos magnéticos e elétricos independem da freqüên-cia, e podem ser representadas por um segmento ideal de linha de transmissão. A Fig. 2 mostra a estrutura básica do modelo de cabo com um número geral de blocos RL.
Os elementos da matriz de perdas são representados via aproximação por funções racionais. Em um meio sem perdas, todos os modos trafegam a velocidade da luz e só há um único tempo de propagação. Portanto, o modelo clássico desenvolvido por Dommel em [7] pode ser usado.
A maior diferença entreZ
l ineaplicada às linhas de transmissão aéreas e aos cabos elétricos é a matriz de capacitâncias. Segundo informações do fabricante, para o cabo submarino, a matriz de capacitâncias não é diagonal como ocorre nos cabos subterrâneos.
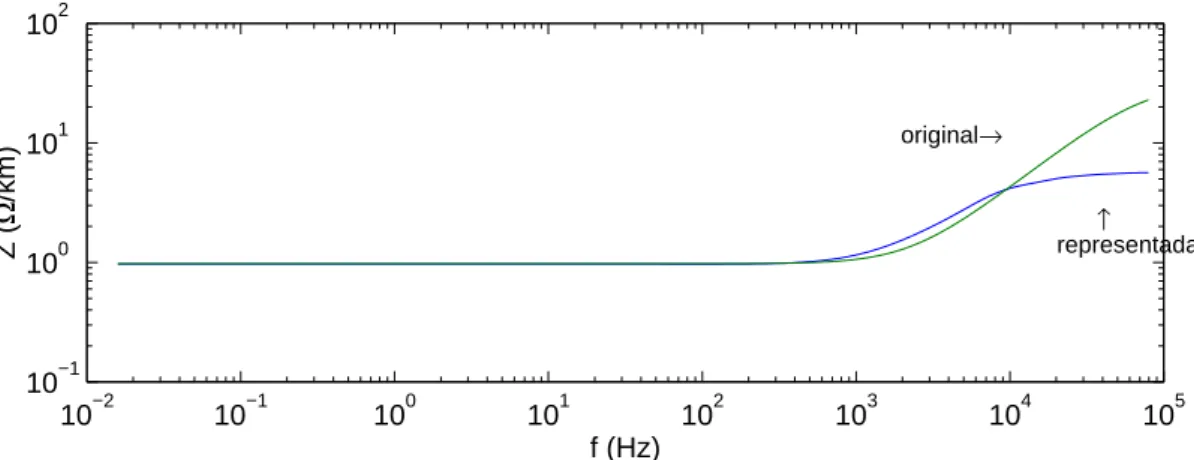
A Fig. 3 mostra a impedância real e a representada para um cabo PT de 3kV, #2 AWG (33mm). A impedância derivada da rede com um só bloco RL para representar a matriz Z
l oss iguala a função original em torno de 60Hz e em 10kHz. Na faixa de 100Hz a 10kHz, o mo-delo apresentará uma impedância maior que o valor real. Por isto, esperam-se resultados mais conservativos nas simulações. Acima de 10kHz, a impedância calculada é essencialmente cons-tante e grandes erros serão produzidos caso exista uma quantidade considerável de harmônicos nestas freqüências.
O cabo produz um efeito amplificador nos harmônicos devido à reflexão da onda. É im-portante avaliar se o modelo é capaz de representar, de forma precisa, todas as freqüências excitadas no cabo elétrico pelo conversor. Resta, portanto, analisar a exatidão do modelo em função do número de blocos RL usados. O teste seguinte foi elaborado com esta finalidade. Ele consiste de um inversor PWM-VSI (“Pulse Width Modulated-Voltage Source Inverter”) com o chaveamento seno-triângulo1, e com uma freqüência máxima de chaveamento de 5kHz,
conec-1Neste esquema de chaveamento os pulsos são gerados através da comparação de uma senóide de referência
10−2 10−1 100 101 102 103 104 105 10−1
100 101 102
Z (
Ω
/km)
f (Hz)
original→
↑
representada
Figura 3: Comparação entre a impedância representada e a original
tado diretamente a um cabo elétrico cujo terminal receptor é deixado aberto. Para este exemplo, considerou-se que o cabo trifásico pudesse ser representado como um conjunto de unidades monofásicas. A maior freqüência de interesse foi tomada como sendo 25kHz. Este exemplo fornece um cenário do pior caso, onde todos os pulsos trafegando do conversor serão refletidos. A Fig. 4 mostra os resultados. Nesta figura, vê-se a tensão de linha no final do cabo. Ainda na mesma figura, vê-se a tensão de linha gerada pelo conversor e a tensão de linha no final do cabo. Nota-se a importância da representação detalhada das perdas, pois, no caso ideal, a tensão no final do cabo chegaria a 5pu. Até mesmo com a representação convencional do
EMTP, tensões irreais seriam obtidas. Cabos muito curtos, quando sob uma tensão PWM, podem chegar a tensões terminais um pouco maiores que 2pu, cerca de 2,1pu [8].
Se as duas possíveis configurações de cabo com parâmetros dependentes da freqüência são comparadas (ítens (c) e (d) na Fig. 4), observa-se que, em termos de máximos e mínimos da tensão terminal no cabo, ambas apresentam o mesmo resultado. O espectro das freqüências, contudo, é ligeiramente diferente. O erro entre as duas configurações dependentes da freqüência (com 1 bloco e com 5 blocos, itens (c) e (d) da Fig. 4 respectivamente) gira em torno de 0.06%, indicando que a a realização mínima deZ
l oss(1 bloco RL) parece razoável para sistemas com eletrônica de potência.
4
Modelo do Motor de Indução
Os motores projetados para utilização em poços de petróleo profundos são de indução, com parâmetros mecânicos e elétricos não usuais. São usualmente conhecidos como motores de bombeio centrífugo submerso (BCS), e consistem da associação em tandem de pequenos rotores resfriados por fluxos externos e internos de óleo. O diâmetro do motor é de cerca de 20cm e o seu comprimento pode chegar a 15m dependendo do nível de potência do motor.
O primeiro modelo de motor de indução implementado noEMTPfoi o Universal Machine
Module (UM Module). Ele é capaz de representar até 12 tipos diferentes de máquinas elétricas
0 1 2 3 4 5 −5 −2.5 0 2.5 5 t(ms) V(pu) V in V out
(a) Cabo sem perdas
0 1 2 3 4 5
−3 −2 −1 0 1 2 3 t(ms) V(pu) V in V out
(b) Representação convencional doEMTP
0 1 2 3 4 5
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2 t(ms) V(pu) V in V out (c)Z
losscom 1 bloco
0 1 2 3 4 5
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2 t(ms) V(pu) V in V out (d)Z
losscom 5 blocos
externamente.
A representação do motor é feita no domíniodq0que tem por vantagem obter uma matriz de indutâncias invariante no tempo. Ainda não há para a máquina de indução formulação por fase como ocorre com a máquina síncrona, Type-58. A máquina pode então ser representada como: 2 6 6 6 6 6 6 6 6 4 v d v d 1 v d2 v q v q1 v q2 v 0 3 7 7 7 7 7 7 7 7 5 = 2 6 6 6 6 6 6 6 6 4 R s R d 1 R d2 R s R q1 R q2 R 0 3 7 7 7 7 7 7 7 7 5 2 6 6 6 6 6 6 6 6 4 i d i d 1 i d2 i q i q1 i q2 i 0 3 7 7 7 7 7 7 7 7 5 + d dt 2 6 6 6 6 6 6 6 6 4 d d 1 d2 q q1 q2 0 3 7 7 7 7 7 7 7 7 5 + 2 6 6 6 6 6 6 6 6 4 ! q 0 0 ! d 0 0 0 3 7 7 7 7 7 7 7 7 5 ; (5)
agora as tensões de velocidade ! d e
!
q aparecem. As relações fluxo-corrente podem ser divididas em três conjuntos: um para o eixo direto, outro para o eixo em quadratura e uma equação para a seqüência zero. Tendo em mente ainda que não há saliência, a equação para o eixo em quadratura é análoga a do eixo direto. O torque eletromagnético produzido pela máquina é dado por
= d i q q i d : (6)
R
sR
1R
2ωλ
qid i
d1
id2
L
0L
2L
1L
sL
mFigura 5: Circuito Equivalente para a Máquina de Indução
Considerando a eq.(5), e assumindo que cada indutância pode ser expressa como uma soma de indutâncias mútuas e de dispersão, pode-se desenvolver o circuito para o eixo–d mostrado na Fig. 5. O circuito para o eixo–qé análogo, diferindo no sinal da tensão de velocidade. Como dito no início deste capítulo, foi assumido que apenas duas gaiolas seriam suficientes para a representação dos circuitos rotóricos.
Com o aumento da ordem harmônica, o escorregamento harmônico tenderá para a unida-de [9]. Um vez que todos os harmônicos estão presentes na região unida-de elevado escorregamento na curva de torque-velocidade2, é necessário usar um modelo capaz de representar o comporta-mento do motor nesta situação. A indutânciaL
0na Fig. 5 provê um acoplamento adicional para os circuitos rotóricos, i.e., o acoplamento entre os circuitos rotóricos é mais intenso do que o
acoplamento entre os circuitos rotóricos e o caminho magnético principal. Há, no fluxo gerado pelo rotor, uma parte que não atravessa todo o entre-ferro e, portanto, não atinge o estator, mas enlaça os circuitos rotóricos. No caso de máquinas síncronas esta indutância é comumente co-nhecida como a reatância de Canay. O valor deL
0 afeta diretamente a distribuição de corrente nas gaiolas e, portanto, o torque eletromagnético desenvolvido pelo motor. A inclusão desta indutância é feita através da conexão externa de elementos acoplados no rotor da máquina.
0 50 100 150 200 250 300 350 400
0 200 400 600 800
(rad/s)
(A)
simulated
measured
Figura 6: Corrente experimental e simulada versus a velocidade do motor
0 50 100 150 200 250 300 350 400 −1000
0 1000 2000 3000 4000 5000
(rad/s)
(Nm)
simulated measured
Figura 7: Torque experimental e simulado versus a velocidade do motor
400HP, 2116V, diretamente conectado à rede com os resultados experimentais fornecidos pelo fabricante do motor. Na Fig. 6 vê-se os valores eficazes da corrente (experimental e simulada) em função da velocidade do motor. A Fig. 7 apresenta a comparação entre os resultados para o torque eletromagnético produzido pelo motor. O valor eficaz da corrente simulada foi calculado de acordo com o seu valor agregado.
Tabela 1: Parâmetros do Motor (em pu)
r
s 0,0557101 x
2 0,80211 x
s 0,073360 x
1 0,03530 x
m 1,8589029 r
1 0,0517504 x
0 0,05693 r
2 0,386501
Das figuras supracitadas vê-se que o modelo obtido é capaz de representar fidedignamente o comportamento do motor na área de baixo escorregamento, bem como na área de escorre-gamento nominal. Os parâmetros do motor são considerados como tendo em pu os mesmos valores na faixa de 100 a 400HP. A Tabela 1 mostra os valores do circuito do motor em pu.
5
Validação Experimental
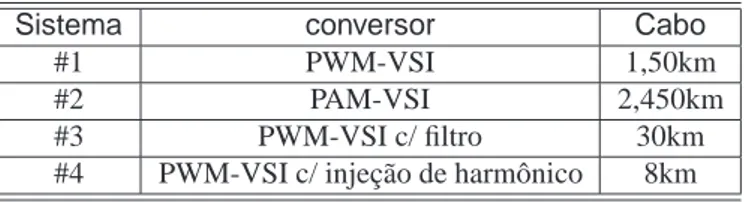
Quatro casos são analisados, sendo que os dois primeiros consistem de unidades reais de bombeamento de petróleo. Os outros dois sistemas consistem em protótipos em escala real, usando conversores de freqüência comerciais. A Tabela 2 mostra uma descrição breve das configurações estudadas.
Tabela 2: Sistemas estudados
Sistema conversor Cabo
#1 PWM-VSI 1,50km
#2 PAM-VSI 2,450km
#3 PWM-VSI c/ filtro 30km
#4 PWM-VSI c/ injeção de harmônico 8km
5.1
PWM-VSI
A Tabela 3 mostra maiores detalhes sobre o primeiro sistema (#1–PWM-VSI). O sistema opera a 66Hz e com uma freqüência de chaveamento igual a 180Hz.
tensão de saída 460V
Conversor semicondutor diodo e IGBT
modulação seno-triângulo
potência 150kVA
Transformador tensão 480:1050V
reatância de dispersão 4.08% nível de tensão 1,8/3kV
Cabo bitola #2 AWG
comprimento 1,5km
potência 100HP
Motor tensão 950V
carga 60% carga nominal
Tabela 3: Descrição do Sistema para PWM-VSI
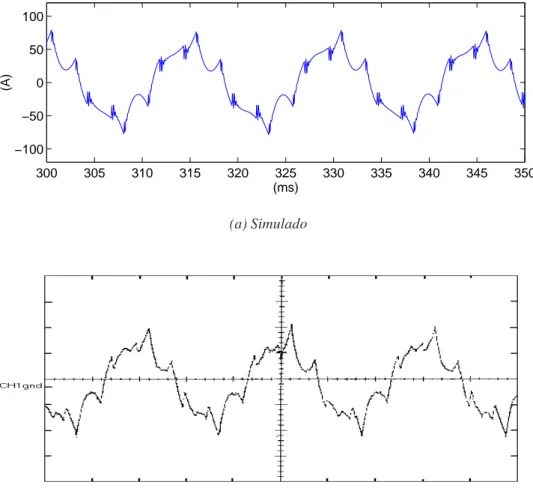
A Fig. 9 mostra a tensão na entrada do cabo. Os picos (spikes) de tensão ocorrem devido à interação do cabo com os pulsos do conversor. A modulação gera pulsos que se comportam como ondas trafegantes no cabo, sendo refletidos no final do cabo elétrico. A impedância de surto do motor é, normalmente, quase 100 vezes maior do que a impedância de surto do cabo. Portanto, os pulsos do conversor são quase totalmente refletidos, causando sobretensões nos terminais do motor. O efeito do inversor sobre o cabo pode ser compreendido como uma série de energizações e desenergizações.
O nível da tensão de saída do conversor deveria ser constante, durante um intervalo de 30 graus para estas condições de operação. Porém, isto não ocorre uma vez que a tensão no elo cc não é constante. Conforme a tensão do conversor muda de um nível para outro3 ela começa a decair. Se maiores informações pudessem ser obtidas com respeito ao valor da indutância e da capacitância do elo cc, o modelo simulado representaria melhor esta situação.
300 305 310 315 320 325 330 335 340 345 350 −100
−50 0 50 100
(ms)
(A)
(a) Simulado
(b) Experimental (vert. 40A/div, hor. 5ms/div)
310 312 314 316 318 320 322 324 326 328 330 −2.5
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
(ms)
(kV)
(a) Simulado
(b) Experimental (vert. 500V/div, hor. 2ms/div)
5.2
PAM-VSI
Em configurações PAM, o inversor usado é o de onda quadrada. As chaves têm uma freqüên-cia de chaveamento igual à fundamental da tensão de saída. Tomou-se para o cabo os mesmo parâmetros da seção anterior, e para o motor, considerou-se que o motor de 135HP tenha em pu os mesmos parâmetros que o motor apresentado na seção anterior. A Tabela 4 mostra maiores detalhes do sistema envolvido neste segundo caso.
tensão de saída 480V
Conversor semicondutor diodo e IGBT
modulação onda quadrada
potência 150kVA
Transformador tensão 480:1050V
reatância de dispersão 4.1% nível de tensão 1,8/3kV
Cabo bitola #2 AWG
comprimento 2,45km
potência 135HP
Motor tensão 950V
carga 75% carga nominal
Tabela 4: Descrição do sistema para PAM-VSI
A Fig. 10 mostra a corrente na entrada do cabo (lado de alta tensão do transformador). A Fig. 11 mostra a tensão na entrada do cabo. Aqui, novamente, a falta de informações sobre os valores dos elementos no elo cc apresenta-se como um diminuidor da qualidade dos resultados simulados. Como no caso anterior, o elo cc não tem uma tensão constante. Neste caso, a si-tuação é até um pouco pior. O conversor é incapaz de manter a simetria no semi-ciclo positivo ou negativo, i.e., o nível de tensão no terço final do semi-período não é o mesmo que no terço inicial. Um conversor de seis pulsos apresenta três estágios por semi-período, sendo o primeiro igual ao último. Outra possibilidade é a ocorrência de erros de medição nos resultados experi-mentais. Maiores informações sobre o conversor e outras medições capazes de esclarecer este erro não foram obtidas.
As sobretensões não são tão altas quanto no caso anterior, e os pulsos no conversor de onda quadrada são mais largos. A tensão apresenta seis níveis, trocando de um para outro a cada 60 graus. A largura maior permite que as oscilações geradas pelo cabo possam ser amortecidas.
5.3
PWM-VSI com Filtro Passivo
Os filtros passivos encontram-se entre as soluções mais comuns dos problemas relacionados com harmônicos. Eles podem ser usados, por exemplo, para minimizar os efeitos dos longos cabos como em [10, 11]. Neste caso, o filtro opera basicamente para diminuir a derivada da tensão em relação ao tempo, dv
dt
, nos terminais do motor.
300 305 310 315 320 325 330 335 340 345 350 −180
−120 −60 0 60 120 180
(ms)
(A)
(a) Simulado
(b) Experimental (vert. 60A/div; hor. 2ms/div)
Figura 10: Corrente na entrada do Cabo – Sistema com PAM-VSI
(o transformador é conectado diretamente à saída do conversor e somente os terminais no lado de alta do transformador estão acessíveis). O conversor é diretamente conectado ao transforma-dor, impossibilitando a medição da tensão antes do filtro. A Tabela 5 apresenta os dados deste terceiro sistema. Ele foi testado com 30km de alimentador a 60 e 66Hz com a bomba operando na rotação horária.
O sistema com 30km de cabo serviu também para avaliar qual o comprimento máximo a ser usado para a seção deZ
l oss. O cabo elétrico tem forte influência na forma de onda da tensão. Uma vez que o sistema com 30km foi testado com o motor desacoplado, ele pode servir para este tipo de análise.
Primeiramente, este sistema é simulado com as seguintes representações para o cabo elétri-co:
3 seções de 10km de comprimento;
325 330 335 340 345 350 −2.5
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
(ms)
(kV)
(a) Simulado
(b) Experimental (vert. 1.1kV/div; hor. 2ms/div)
Figura 11: Tensão na entrada do cabo – Sistema com PAM-VSI
resul-tensão de saída 460V
Conversor semicondutor diodo e IGBT
modulação seno-triângulo
potência 450kVA
Transformador tensão 460:4160V
reatância de dispersão 5.1% nível de tensão 1,8/3kV
Cabo bitola #2 AWG
comprimento 10km e 30km
potência 240HP
Motor tensão 2205V
carga 80% e 40% da carga nominal
Tabela 5: Descrição do sistema para PWM-VSI com filtro
tado experimental obtido para esta situação. A precisão, a simplicidade e atingidas denotam a vantagem do modeloZ
l ine sobre os modelos dependentes da freqüência a parâmetros concen-trados como os apresentados em [12]. O comprimento máximo do circuito dependente da freqüência é de um quarto do comprimento de onda da maior freqüência de interesse. Portanto, para modelar freqüências de até 10kHz, implicaria em um comprimento máximo em torno de 8km.
Tabela 6: Comparação dos Resultados Simulados e Experimentais— PWM-VSI com filtro
Rotação Tensão Corrente
Anti-horária Motor Cabo Motor Cabo
V r
ms THD% V r
ms THD% V r
ms THD% V r
ms THD%
Simulação (60Hz) 2027 2,0 3580 1,8 52,1 1,3 51,7 1,5
Experimental (60Hz) 2010 2,5 3461 1,9 49,9 1,7 48 1,8
Simulação (66Hz) 2209 2,6 3604 2,0 50,5 1,1 47,4 1,4
Experimental (66Hz) 2195 3,7 3560 2,4 46,7 1,8 44,4 1,2
A Tabela 6 mostra os resultados simulados juntamente com os valores medidos. Devido ao excessivo comprimento do cabo elétrico, o conversor opera na sobremodulação a fim de atingir uma tensão maior para compensar o aumento da queda de tensão ocorrido com o aumento do comprimento do cabo. Na sobremodulação, a razão entre a tensão de controle e a onda trian-gular do conversor é maior que um. Isto produz uma tensão de saída mais elevada porém, em contrapartida, aumenta o conteúdo harmônico do conversor. O valor exato da sobremodulação não foi possível de ser obtido. Como o aumento da queda de tensão no cabo deve estar em torno de 15% a 20%, foi suposto que o conversor opera, para este caso, com uma sobremodulação de 1,15. No primeiro caso, considerou-se que o fator de modulação era 0,95.
entre a simulação e a medição são pequenos.
5.4
PWM-VSI com injeção de terceiro harmônico
O quarto caso estudado usa um conversor PWM-VSI com injeção de terceiro harmônico. Este sistema também é um protótipo e foi montado na fábrica WEG [13]. O objetivo era uma análise preliminar do comportamento de um sistema de acionamento envolvendo transformador elevador e abaixador. O sistema consiste de um conversor de freqüência com retificador a diodo e inversor a IGBT, um transformador elevador de 460:1500V, 150kVA, 5,01%. Um cabo submarino de 8km, 1,8/3kV; e um cabo motor de 100cv, 460V. O motor empregado é um motor de indução convencional categoria N (norma ABNT). Ao invés da carga centrífuga, a carga mecânica usada varia linearmente com a velocidade de rotação.
700 710 720 730 740 750 760 770 780 790 800 −6
−4 −2 0 2 4 6
(ms)
(kV)
3 x 10km 30km
(a) Simulado
100 105 110 115 120 125 130 135 140
−4 −3 −2 −1 0 1 2 3 4
(kV)
(ms) Experimental
(b) Experimental
450 455 460 465 470 475 480 485 490 495 500 −5
−4 −3 −2 −1 0 1 2 3 4 5
(ms)
(kV)
450 455 460 465 470 475 480 485 490 495 500−200 −150 −100 −50 0 50 100 150 200
(ms)
(A)
(a) Simulado
(b) Experimental (vert. 1.0kV e 50 A/div; hor. 4ms)
360 365 370 375 380 385 390 395 400 −1000
−500 0 500 1000
(V)
(ms)
360 365 370 375 380 385 390 395 400
−200 −100 0 100 200
(A)
(ms)
(a) Simulado
0 5 10 15 20 25 30 35 40
−1000 −500 0 500 1000
(V)
(ms) Experimental
0 5 10 15 20 25 30 35 40
−200 −100 0 100 200
(A)
(ms)
(b) Experimental (vert. 4kv/div e 150A/div hor. 4ms/div)
0 10 20 30 40 50 60 70 0
200 400 600
h
V(V)
Simulated
0 10 20 30 40 50 60 70
0 200 400 600
h
V(V)
Experimental
(a) Tensão
0 10 20 30 40 50 60 70
0 50 100 150
h
I(A)
Simulated
0 10 20 30 40 50 60 70 80
0 50 100 150
h
I(A)
Experimental
(b) Corrente
6
Conclusão
Este trabalho apresentou a modelagem do sistema de acionamento em freqüência variável quando há um longo alimentador envolvido, típico de instalações industriais. O sistema de acionamento de conjuntos moto-bombas para a explotação de petróleo foi escolhido porquanto representa uma situação crítica, onde o comprimento do cabo pode atingir dezenas de quilôme-tros.
O principal objetivo da modelagem é permitir uma investigação detalhada da interação do conjunto conversor–alimentador–motor. A faixa de freqüência de interesse vai de zero até algu-mas dezenas de kHz, e dedicou-se um cuidado especial ao modelo do motor e do cabo elétrico, visto que estes equipamentos têm influência marcante para a precisa representação dos fenôme-nos que se propõe analisar.
Vale ainda notar que o desempenho do sistema simulado não foi afetado pelo uso de modelos simplificados de chaves. Todavia, o conversor de freqüência deve ter o estágio retificador e o elo cc representados para poder avaliar as oscilações de baixa freqüência e interharmônicos na tensão e na corrente de entrada do conversor.
Como este sistema de acionamento opera em malha aberta, é obrigatório o uso de uma mo-delagem acurada, caso se objetive através da simulação, um melhor conhecimento do sistema.
A saturação possui um efeito interessante mas não considerado neste trabalho. A principal razão disto está no fato do motor no acionamento operar sempre com uma relação V
f
menor ou igual à nominal. Além disto, o motor opera, em todos os casos, abaixo do torque nominal, em torno de 80 a 90% da carga. Isto ocorre devido a razões térmicas e pelas perdas adicionais devidas aos harmônicos.
Caso necessário, a representação da saturação poderia ser introduzida através de indutâncias lineares por parte, como usualmente se modela reatores não lineares noEMTP. Para a saturação da dispersão, esta representação seria imediata e trivial. Já para a magnetização, a representação mais usual e simples seria representar a máquina com uma indutância saturada e outra não-saturada. A divisão da curva de saturação da magnetização em diversas partes apresenta ainda alguns desafios na parte de programação para a obtenção de um modelo estável.
A modelagem modal, tão comum nos estudos de transitórios em sistemas de transmissão ou distribuição, apresenta severas restrições com relação à modelagem de um cabo elétrico. Os sistemas com eletrônica de potência têm tempos de simulação consideravelmente mais longos que os encontrados nos estudos de transitórios, cerca de 10 vezes maior. Tal tempo pode excitar erros numéricos nos modelos no domínio modal. Uma outra opção a este tipo de abordagem é o uso do domínio de fase para a elaboração do modelo do cabo elétrico.
Neste trabalho, a impedância de perdas, Z
l oss, representa a real até 10kHz, e, após esta freqüência, torna-se um valor constante. Usar um número maior de RL para representar Z
l oss permitiria o aumento da máxima freqüência de corte, onde o circuito passa a ser visto como uma resistência, e a diminuição do erro entre a impedância de perdas real e a representada. Outro ponto importante a ressaltar aqui é o número de circuitos RL e o comprimento máximo da repre-sentação da seção de perdas,Z
30km testados neste trabalho. O fato de representar o cabo por um estrutura multifásica permite o uso do modelo em outras aplicações envolvendo um cabo elétrico. Para os casos estudados neste trabalho, a representação do acoplamento no cabo elétrico mostrou-se importante para uma melhor representação dos valores máximos e mínimos obtidos pela simulação.
O modelo do cabo elétrico funciona bem para passos de cálculo iguais ou menores que um submúltiplo da constante de propagação,, da seção sem perdas. Oscilações irreais foram encontradas em casos onde o passo de cálculo era da ordem da constante.
Em sistemas com partes fisicamente inacessíveis, os resultados de simulação são de grande valia. Através deles, pode-se avaliar o desempenho do motor, bem como o perfil da tensão ou até mesmo da derivada da tensão em relação ao tempo (dv
dt
) em diversos pontos do sistema. Além disso, permite a elaboração de estudos eletromecânicos para o sistema de acionamento. O efeito do inversor sobre o cabo pode ser entendido como uma série de transitórios de energização e desenergização, dependendo da polaridade da tensão de saída do inversor. Os pulsos gerados pelo inversor comportam-se como ondas trafegando do inversor para o motor, enquanto ondas refletidas no extremo do cabo elétrico trafegam do motor ao inversor. Portanto, se o sistema não prover amortecimento suficiente, a tensão terminal do motor terá maiores oscilações que a tensão gerada pelo inversor. O enrolamento do motor representa um caminho de alta impedância para os harmônicos de alta freqüência. Logo, mesmo que a forma de onda da tensão apresente componentes em altas freqüências, a corrente terá um comportamento distinto.
Quando um filtro passivo é usado no sistema de acionamento, a freqüência de chaveamento deve ser obrigatoriamente alta, uma vez que a primeira ressonância ocorre normalmente entre 500 e 1500Hz. O controle do conversor deve ser capaz de manter este padrão de chaveamento em todas as ocasiões. Caso contrário, situações inesperadas podem ocorrer. Uma freqüência de chaveamento baixa provavelmente produziria componentes harmônicos que seriam amplifica-dos, distorcendo as formas de onda de tensão e corrente.
Referências
[1] A. C. S. de Lima, R. Stephan, and A. Pedroso, “Modelling the electrical drive system for oil exploitation,” in Proceedings of IPST’97—International Power System Transients
Conference, (Seattle), pp. 234–239, Jun 1997.
[2] J. Bentley and P. Link, “Evaluation of motor power cables for pwm ac drives,” IEEE Trans.
on Ind. Appl., vol. 33, pp. 342–358, Mar 1997.
[3] J. Marti, “Accurate modelling of frequency-dependent transmission lines in emtp simula-tion,” IEEE Trans. on PAS, vol. 101, pp. 147–155, Jan 1982.
[4] B. Gustavsen, J. Sletbak, and T. Henriksen, “Calculation of the electromagnetic transients in transmission cables and lines taking frequency dependent effects accurately account,”
IEEE Trans. on Power Delivery, vol. 10, pp. 1076–1084, April 1995.
[5] T. Noda, N. Nagaoka, and A. Ametani, “Phase-domain modeling of frequency-dependent transmission lines by means of an arma model,” IEEE Trans. on Power Delivery, vol. 11, pp. 401–411, Jan 1996.
[6] F. Castellanos and J. Marti, “Full frequency dependent phase-domain transmission line model,” IEEE Trans. on Power Systems, pp. 1331–1339, Aug. 1997.
[7] J. A. Martinez, ed., Computer Analysis of Power System Transients— Selected Readings. IEEE, 1997.
[8] R. Kerkman, D. Leggate, and G. Skibinski, “Interaction of drive modulation and cable parameters on AC motor transients,” IEEE Trans. on Ind. Appl., vol. 33, pp. 342–358, May 1997.
[9] M. Kazmierkowski and H. Tunia, Automatic Control of Converter-Fed Drives. Elsevier, 1994.
[10] A. VonJuanne and P. Enjeti, “Design considerations for an inverter output filter to mitigate the effects of long motor leads in asd applications,” IEEE Trans. on Ind. Appl., vol. 33, pp. 10–18, Set 1997.
[11] A. VonJuanne and P. Enjeti, “Applications issues for pwm adjustable speed ac motor drive systems,” IEEE Ind. Appl. Magazine, vol. 2, pp. 10–18, Set 1996.
[12] T. Henriksen, “First order approximation to the frequency dependence of parameters in EMTP,” in LEC –21st EMTP User group meeting, 1993.