i
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
ESCUELA PROFESIONAL DE INGENIERÍA ELÉCTRICA
TESIS
“OBTENCIÓN GRÁFICA DEL CONTROL DE VELOCIDAD PARA MOTORES DE CORRIENTE CONTINUA MEDIANTE EL MODELADO Y SIMULACIÓN
UTILIZANDO PSIM”
Código CTI : 0303 0007: Uso eficiente de la energía en el sector industrial y residencial - comercial Código UNESCO: 3306.03: Motores Eléctricos
Para optar el Título Profesional de:
INGENIERO ELECTRICISTA
Presentado por:
QUISPE PÉREZ; José
Huancayo - Mayo 2 0 2 2
ii
A S E S O R
Msc. Ing. César J. Lindo Gutarra
iii
DEDICATORIA
Dedico mi tesis a mis padres que están en el cielo, a mi papá Marcelino por haberme brindado sus enseñanzas y buen ejemplo de trabajo y honradez; y a mi mamita Angélica quien siempre estuvo a mi lado, con su gran fortaleza y valentía ante la vida, dándome todo su cariño y velando siempre por mí.
A mi hermano Marcelino, por su amor incondicional, quien siempre estuvo apoyándome en todo momento, protegiéndome y guiándome como un padre, gracias por tus enseñanzas y todos los sacrificios que hiciste por mí.
A mi querida y adorada esposa, a quien amo con todo mi corazón y con quien juramos estar juntos por siempre; gracias por su paciencia, comprensión e inmenso cariño, porque con su gran fortaleza me motiva a seguir siempre adelante.
iv RESUMEN
En el presente trabajo de investigación se realizaron cálculos en base a la simulación de una máquina de corriente continua: La simulación se realizó mediante el PSIM; el cual es un paquete de simulación con una interfaz de usuario amigable y una simulación rápida diseñada explícitamente para control de motores y electrónica de potencia. Proporciona un entorno sólido para el control analógico y digital, la electrónica de potencia y los sistemas de accionamiento de motores. Cubre tres módulos, que son el módulo de control digital, el módulo de accionamiento del motor y el módulo acoplador SIM. En los estudios de accionamiento del sistema, el módulo de accionamiento del motor tiene una carga mecánica y módulos de máquina incorporados. El paquete de simulación de PSIM consta de tres programas, que son el programa de procesamiento de formas de onda SIMVIEW, el programa de esquemas de circuitos y el simulador. Una estructura de circuito se representa en PSIM en cuatro bloques, que son circuito de potencia, circuito de control, sensores y controladores de conmutación.
Finalmente la tesis está dividida en cuatro capítulos: el primer capítulo trata sobre el planteamiento del problema, el segundo capítulo trata sobre los antecedentes y el marco teórico, el tercer capítulo se refiere a la metodología de la investigación, y el último capítulo se refiere a la presentación de resultados.
Palabras clave: simulación, electrónica de potencia, igbt´s, fuerza magnética, corriente continua, fet´s.
v SUMMARY
In the present research work, calculations will be made based on the simulation of a direct current machine: The simulation will be carried out using the PSIM;
which is a simulation package with a friendly user interface and fast simulation designed explicitly for motor control and power electronics. It provides a robust environment for analog and digital control, power electronics, and motor drive systems. It covers three modules, which are digital control module, motor drive module and SIM coupler module. In system drive studies, the motor drive module has a mechanical load and built-in machine modules. The PSIM simulation package consists of three programs, which are the SIMVIEW waveform processing program, the circuit diagram program, and the simulator. A circuit structure is represented in PSIM in four blocks, which are power circuit, control circuit, sensors, and switching controllers.
Finally, the thesis is divided into four chapters: the first chapter deals with the problem statement, the second chapter deals with the background and the theoretical framework, the third chapter refers to the research methodology, and the last chapter refers to the presentation of results.
Keywords: simulation, power electronics, igbt's, magnetic force, direct current, fet´s.
vi
INTRODUCCIÓN
Años atrás variar la velocidad de los motores de corriente continua con respecto a los motores de corriente alterna era relativamente mucho más fácil, en todo sentido, a saber: en la implementación del circuito variador, en la versatilidad de los dispositivos en el mercado, en el costo de los dispositivos, etc. Mejor dicho si se requería variar la velocidad del motor en un proyecto dado era preferible optar por un motor de corriente continua. Aún sabiendo en ese entonces que variando la velocidad de los motores de corriente continua con los dispositivos existentes el torque del motor decaía.
Paralelamente la electrónica de potencia evolucionó trayendo consigo dispositivos electrónicos de última generación como los mosfet´s, igbt´s, dispositivos que son capaces de manejar corrientes del orden de más de 1,5 kA, a tensiones del orden de los kilovoltios y al mismo tiempo manejar frecuencias del orden de los Mhz. Con estos dispositivos se hace fácil el control de velocidad de los motores de corriente alterna, los cuales tuvieron más acogida por ser de menor peso, tamaño y costo que los motores de corriente continua.
Finalmente con el avance de la tecnología médica, aeronáutica, automovilística, telecomunicaciones, juguetería, etc. Donde se requiere cada vez más motores con variación de velocidad más pequeños, se prestan mejor los motores de corriente continua.
vii INDICE RESUMEN
SUMMARY INTRODUCCIÓN
CAPITULO 1
PLANTEAMIENTO DE LA TESIS
PAG.
1.1 Caracterización del problema 13
1.2 Planteamiento del problema 13
1.3 Formulación del problema 14
1.3.1 Problema general 14
1.3.2 Problema específico 14
1.4 Objetivos de la investigación 14
1.4.1 Objetivo general 14
1.4.2 Objetivo específico 15
1.5 Justificación del estudio 15
1.6 Delimitación de la investigación 15
CAPITULO 2
ANTECEDENTES Y MARCO TEÓRICO
2.1 Antecedentes 16
2.1.1 Antecedentes a nivel internacional 16
2.1.2 Antecedentes nacional 19
2.2 Marco teórico: Definiciones 25
2.2.1 Induciendo una fuerza en un conductor 25
viii
2.2.2 Teória de operación 25
2.2.3 Torque 29
2.2.4 Acción del generador en un motor 31 2.2.5 Velocidad del motor de cc 33 2.2.6 Métodos de control de velocidad de motores de cc.
en derivación 34
2.2.7 Métodos de control de velocidad de motores de cc.
en serie 40
2.2.8 Controlador 44
2.2.9 Generalidades del motor de derivación 46 2.2.10 Modelo del motor de cc en derivación 47 2.11 Hipótesis General e Hipótesis específicas 49
2.11.1 Hipótesis General 49
2.11.2 Hipótesis Específicas 49
2.12 Variables 50
2.12.1 Independiente 50
2.12.2 Dependiente 50
CAPITULO 3
METODOLOGÍA DE LA INVESTIGACIÓN
3.1 Tipos de estudio y método de investigación 51
3.2 Población y muestra 52
3.2.1 Población 52
ix
3.2.2 Muestra 52
3.3 Métodos de recolección de datos 52
3.3 Instrumentos de recopilación de datos 52
CAPÍTULO 4
PRESENTACIÓN DE RESULTADOS
4.1 Datos y resultados de la investigación generalidades 54 4.1.1 control de velocidad mediante tiristor 56 4.1.2 Control de velocidad mediante un motor de
impulsor de chopper reductor 58
4.1.3 Circuito de puente completo 58
4.2 Procesamiento de datos 59
4.2.1 Motor de cc con una carga de par constante 59 4.2.2 Método de control de velocidad de resistencia de
campo del motor de cc 60
4.2.3 Método de control de velocidad de resistencia de
campo del motor de cc 60
4.3 Resultados de la simulación 62
CONCLUSIONES RECOMENDACIONES BIBLIOGRAFÍA
ANEXOS
13 CAPITULO 1
IDENTIFICACIÓN DEL PROBLEMA 1.1 CARACTERIZACIÓN DEL PROBLEMA
La variación de la velocidad en las máquinas eléctricas desde varias décadas atrás se viene incrementando a nivel mundial debido al avance tecnológico; hoy en día en lo que se refiere a los motores eléctricos de corriente continua se ha incrementado exponencialmente en las industrias el control de velocidad, como por ejemplo en la electromedicina, la industria naval, aérea, las telecomunicaciones, la industria de los cables en sus distintos calibres y funciones, jugueteria, la industria automotriz, etc. Esto ya se venia dando en el transcurrir del tiempo; puesto que los motores de corriente continua siempre fueron más versátiles y más baratos e incluso más pequeños que otros cuando se trata de la variación de la velocidad.
1.2 PLANTEAMIENTO DEL PROBLEMA
Los métodos de motor de CC de control de velocidad (SCDCM) se utilizan ampliamente en circuitos electrónicos de potencia. Esta tesis presenta algunos métodos SCDCM, como el control de voltaje de armadura, los resultados muestran que cuando aumenta el voltaje de armadura, aumenta la velocidad del motor y cuando disminuye el voltaje de armadura,
14
disminuye la velocidad del motor. Sin embargo, en los métodos de resistencia de campo, cuando la resistencia de campo aumenta, la velocidad aumenta y cuando la resistencia de campo disminuye, la velocidad se reduce. Mientras que en el control de retroalimentación cuando se usa el método SCDCM de retroalimentación, se han usado dos bloques, el primer bloque incluye la velocidad de referencia del motor y el segundo bloque incluye el valor agregado de la velocidad a la velocidad de referencia del motor. La simulación de potencia (PSIM) se utiliza para diseñar y simular los circuitos de control de velocidad del motor de CC.
1.3 FORMULACIÓN DEL PROBLEMA 1.3.1 Problema General
1. ¿ Cómo se obtendrá la gráfica del control de velocidad al variar la resistencia de campo para motores de corriente contínua mediante el modelado y simulación utilizando el PSIM?.
1.3.2 Problema Específico
1. ¿Cómo se obtendrá la gráfica del control de velocidad al variar el voltaje de armadura para motores de corriente contínua mediante el modelado y simulación utilizando el PSIM?.
1.4 OBJETIVOS DE LA INVESTIGACIÓN 1.4.1 Objetivo General
1. Mediante el modelado y simulación utilizando el PSIM se obtendra la gráfica del control de velocidad al variar la resistencia de campo para motores de corriente contínua.
15 1.4.2 Objetivos Específicos
1. Mediante el modelado y simulación utilizando el PSIM se obtendra la gráfica del control de velocidad al variar el voltaje de armadura para motores de corriente contínua.
1.5 JUSTIFICACIÓN.
Práctica. – Ultimamente el modelado y la simulación para diversos proyectos como la mecánica, eléctrica, electrónica, mecatrónica, arquitectura, y de ingeniería en general, otros, etc. Se han convertido como herramientas básicas para el desarrollo implementación y construcción de sistemas de caso práctico y real, es que la simulación puede apriori determinar valores muy cercanos a los valores reales que se pueden corroborar haciendo uso de las matemáticas.
Económico.- el control de velocidad que se plantéa en la presente tesis, es bastante versátil y económica.
1.6 DELIMITACIÓN DE LA INVESTIGACIÓN
La investigación no trata sobre ningún diseño, la tesis muestra una forma sencilla mediante el modelamiento y el software PSIM graficar las curvas del control de velocidad usando la resistencia de campo y graficar el control de velocidad al variar el voltaje de armadura.
16 CAPITULO 2
ANTECEDENTES Y MARCO TEÓRICO 2.1 ANTECEDENTES
2.1.1 ANTECEDENTES A NIVEL INTERNACIONAL
1R. Nagarajan, S. Sathishkumar, S. Deepika, G. Keerthana, J.K.
Kiruthika and R. Nandhini, “Implementation of chopper fed speed control of separately excited DC motor using PI controller”, International Journal of Engineering and Computer Science, vol.
6, pp. 20631-20633, 2017. [16] Afirman que: Rangos seguros de operación para los dos métodos comunes
A.- Control de resistencia de campo
Cuanto menor sea la corriente de campo en una derivación (o excitación separada) de un motor c.c., más rápido gira; y cuanto mayor es la corriente de campo, más lento gira. Dado que un aumento en la corriente de campo provoca una disminución en la velocidad, siempre hay una velocidad mínima alcanzable mediante el control del
1 [8] Ahmad A, and Taib M N, 2003, A study On the DC Motor Speed Control by Using
BackEMF, PAG. 35 - 37
17
circuito de campo. Esta velocidad mínima ocurre cuando el circuito de campo del motor tiene la corriente máxima permitida que fluye a través de él.
Si un motor está operando a su voltaje terminal nominal, potencia y corriente de campo, entonces estará funcionando a la velocidad nominal, también conocida como velocidad base. El control de resistencia de campo puede controlar la velocidad del motor para velocidades por encima de la velocidad base pero no para velocidades por debajo de la velocidad base.
Para lograr una velocidad más lenta que la velocidad base mediante el control del circuito de campo requeriría una corriente de campo excesiva, posiblemente quemando el devanado de campo.
B.- Control de voltaje de armadura
Cuanto menor sea la tensión de armadura en un circuito de c.c. con motor de excitación independiente, gira más lento, y cuanto mayor es el voltaje de armadura, más rápido gira.
Dado que un aumento en el voltaje del inducido provoca un aumento en velocidad, siempre hay una velocidad máxima alcanzable por el control de tensión de la armadura. Esta velocidad máxima se produce cuando la tensión del inducido del motor alcanza su nivel máximo permisible.
Si un motor está operando a su voltaje terminal nominal, potencia y corriente de campo, entonces estará funcionando a la velocidad nominal, también conocida como base velocidad. El control de voltaje
18
de armadura puede controlar la velocidad del motor para velocidades por debajo de la velocidad base pero no para velocidades por encima de la velocidad base.
Para lograr una velocidad más rápida que la velocidad base mediante el control del voltaje del inducido, se requeriría un voltaje del inducido excesivo, posiblemente dañar el circuito del inducido.
Estas dos técnicas de control de velocidad son obviamente complementarias. El control de voltaje de armadura funciona bien para velocidades por debajo de la velocidad base, y el control de resistencia de campo funciona bien para velocidades por encima de la velocidad base.
2En la publicación: K.S. Deshmukh and R.S. Hiware, “Speed control of separately excited DC motor using chopper,”
International Research Journal of Engineering and Technology, vol. 4, pp. 799-803, 2017. comenta: Modelado de excitación separadas-Motor de corriente continua [4]
El motor de CC con excitación independiente tiene dos devanados y cada uno de ellos está alimentado por una tensión de alimentación independiente. La figura 2.1 muestra el circuito equivalente de un motor excitado por separado, donde Ra y La representan la resistencia y la inductancia del devanado del inducido, respectivamente. La resistencia y la inductancia del devanado de campo. se denotan por
2 [8] Ahmad A, and Taib M N, 2003, A study On the DC Motor Speed Control by Using
BackEMF PAG. 45 -48
19
Rf y Lf, respectivamente. Además, Ea es la fem inducida en el circuito del inducido, ω la velocidad del motor, kb es la constante de fuerza contraelectromotriz, Te, TL son el motor y el par de carga, respectivamente, B es el coeficiente de fricción viscosa y J es la inercia total del motor.
El modelo matemático del motor de CC consta de ecuaciones eléctricas y mecánicas. Estos dos grupos de ecuaciones nos permiten entender mejor el motor DC en su funcionamiento real. Este modelo se rige por las siguientes ecuaciones:
Figura 2.1 Motor DC con excitación separada
𝑉𝑎(𝑡) = 𝑅𝑎 𝐼𝑎(𝑡) + 𝐿
𝑎𝑑𝐼𝑎(𝑡)𝑑(𝑡)
+ 𝐸(𝑎)𝑡
𝑉
𝑓(𝑡) = 𝑅
𝑓𝐼
𝑓(𝑡)+𝐿
𝑓𝑑𝐼𝑓(𝑡)𝑑𝑡
Ea(t) = Kb W(t)
𝑇
𝑒= 𝐽
𝑑𝑤(𝑡)𝑑𝑡
+ BW(t) +T
L2.1.2 ANTECEDENTES A NIVEL NACIONAL
K.S. Moreyra and R.S. Vidaurre, “Speed control of separately excited DC motor using chopper,” International Research Journal of Engineering and Technology, vol. 4, pp. 799-803, 2017., comentan:
20
Muchos sectores industriales, como la robótica, los laminadores de acero, las grúas eléctricas y los vehículos eléctricos de molienda, utilizan el motor de CC. Algunas ventajas importantes en el uso del motor de CC se pueden enumerar a continuación:
1. Un motor de CC se puede controlar en un amplio rango y se puede usar fácilmente para un par y una velocidad constantes.
2. Un motor de CC se puede acelerar o desacelerar rápidamente y puede responder al control de retroalimentación, bajo costo y estructura de control menos compleja.
Hay varias formas de variar la velocidad del motor de CC, como el control de flujo de campo y el control de armadura reostático. El método de control de armadura reostático solo se usa en el caso de baja potencia. La velocidad del motor de CC también se puede variar variando el voltaje del inducido. En este caso, una parte de la energía es consumida por el dispositivo de alimentación. Por este motivo, es preferible alimentar el motor DC de forma discontinua con un rectificador controlado o con un reductor. El chopper de buck tradicional se usa en muchos trabajos.
A. Harrouz, del olivar, “Backstepping control of a separately excited DC motor,” Electrical Engineering, https://doi.org/09.1003/s00202-017-0592-5, 2017 [10]. Comenta sobre la LEY DE CONTROL:
La teoría de control es una rama interdisciplinaria de la ingeniería y las matemáticas que se ocupa del comportamiento de los sistemas
21
dinámicos con entradas y cómo se modifica su comportamiento por la retroalimentación. El objetivo habitual de la teoría de control es controlar una planta, que da una salida que sigue una señal de control llamada referencia, que puede ser un valor fijo o variable. Para esto, es necesario diseñar un controlador para monitorear la salida comparándola con la referencia. La diferencia entre la salida real y la deseada, llamada señal de error, se aplica como retroalimentación a la entrada del sistema, para acercar la salida real a la referencia. Un diagrama de bloques que representa la teoría de control se representa a continuación en la Figura 2.2
3Figura 2.2 Representación del diagrama de bloques del sistema de control de retroalimentación negativa
Figura 2.3 Representación del diagrama de bloques del sistema de entrada única y salida única (SISO)
3 Ahmad A, and Taib M N, 2003, A study On the DC Motor Speed Control by Using BackEMF
pag. 89 -99
22
En general, la Figura 2.3 representa un sistema lineal e invariante en el tiempo donde C es el controlador, P es la planta y F es la retroalimentación del sistema. El sistema se puede analizar usando la transformada de Laplace sobre las variables y así dar las siguientes relaciones:
Y(s) = P(s)U(s) U(s) =C(s)E(s)
E(s) = R(s) – F(s)Y(s)
Y ahora resolviendo Y(s) en términos de R(s), obtenemos:
𝑌(𝑠) = 𝑃(𝑠)𝐶(𝑠)
1 + 𝐹(𝑠)𝑃(𝑠)𝐶(𝑠)𝑅(𝑠) = 𝐻(𝑠)𝑅(𝑠)
Esto se denomina función de transferencia de bucle cerrado y, en la mayoría de los casos, F(s) = 1. El uso del método de función de transferencia anterior en el control de motores será una forma de diseñar el controlador para lograr y mantener un estado objetivo comparando constantemente el estado actual con el estado objetivo. Y la retroalimentación en este caso, se da desde la retroalimentación de un sensor. Y, el controlador PID con o sin modificaciones de vista es el controlador más común utilizado en los servoaccionamientos del motor.
J.R. Gastiaburu menaka y Lazaro Mororeyra, en su articulo
“Formas diferentes de lograr el control y regulación de la velocidad en motores de corriente continua” International Research Journal of Engineering and Technology, vol. 3, pp. 799- 803, 2017. [17], comentan:
Los motores de CC constan de devanados montados en el rotor (inducido) y devanados estacionarios (polos de campo). En todos los
23
motores de CC, excepto los motores sin escobillas de imanes permanentes, la corriente debe conducirse a los devanados del inducido pasando la corriente a través de escobillas de carbón que se deslizan sobre un conjunto de superficies de cobre llamado conmutador, que está montado en el rotor.
Las barras del conmutador están soldadas a las bobinas del inducido.
La combinación de escobilla/conmutador crea un interruptor deslizante que energiza partes particulares de la armadura, según la posición del rotor. Este proceso crea polos magnéticos norte y sur en el rotor que son atraídos o repelidos por los polos norte y sur del estator, que se forman al pasar corriente continua a través de los devanados de campo. Es esto atracción y repulsión magnética que hace que el rotor gire. El comportamiento dinámico de la máquina de CC está determinado principalmente por el tipo de conexión entre el devanado de excitación y el devanado del inducido, incluido el devanado de conmutación y compensación.
La mayor ventaja de los motores de CC puede ser el control de velocidad. Dado que la velocidad es directamente proporcional al voltaje del inducido e inversamente proporcional al flujo magnético producido por los polos, ajustar el voltaje del inducido o la corriente de campo cambiará la velocidad del rotor.
El control de velocidad significa el cambio de una velocidad a un valor requerido para realizar el proceso de trabajo específico. Este ajuste no debe tomarse para incluir el cambio natural en la velocidad que ocurre
24
debido al cambio en la carga en el eje impulsor. El control de velocidad eléctrico tiene muchas ventajas económicas y de ingeniería sobre control mecánico de velocidad. Existen muchos métodos para controlar la velocidad de un motor de derivación de CC, pero el método de control del reóstato de campo es el más confiable, económico e independiente de la carga del motor. Este método solo es aplicable cuando queremos una velocidad superior a la velocidad normal del motor. En este método, un aumento en la resistencia de control reduce la corriente de campo con la consiguiente reducción del flujo y un aumento de la velocidad. Pero si queremos obtener baja velocidad para controlar el accionamiento mecánico de baja velocidad, usamos el método de control del reóstato de armadura. En este método, la velocidad a plena carga se puede reducir a cualquier valor deseado dependiendo de la cantidad de resistencia.
Pero si usamos ambas técnicas en la misma máquina, podemos controlar el motor desde la velocidad cero hasta la máxima. En el control de campo, el ajuste se puede obtener por medio de un pequeño reóstato y se obtiene una regulación de velocidad relativamente buena para todas las velocidades, pero con el control de armadura se requiere una resistencia voluminosa. Así que si usamos ambos métodos
simultáneamente, el costo de la máquina aumentará un poco pero obtendremos un amplio rango de control de velocidad. Para neutralizar el efecto de la pérdida de potencia, se puede utilizar un disipador de calor. Entonces, con este método, podemos controlar la velocidad de
25
un motor de derivación de CC para realizar varias tareas de manera efectiva y económica.
2.2 MARCO TEÓRICO: DEFINICIONES
2.2.1 INDUCIENDO UNA FUERZA EN UN CONDUCTOR4
Hay dos condiciones que son necesarias para producir una fuerza sobre un conductor.
El conductor debe llevar corriente.
El conductor debe estar dentro de un campo magnético.
Cuando se dan estas dos condiciones, se aplicará una fuerza al conductor, que intentará mover el conductor en una dirección perpendicular al campo magnético. Esta es la teoría básica por la que funcionan todos los motores de corriente continua.
2.2.2 TEORÍA DE OPERACIÓN
Todo conductor portador de corriente tiene un campo magnético a su alrededor. La dirección de este campo magnético se puede encontrar usando la regla de la mano izquierda para conductores que llevan corriente. Cuando el pulgar apunte en la dirección del flujo de corriente, los dedos apuntarán en la dirección del campo magnético producido, como se muestra en la Figura 2.4.
Si un conductor portador de corriente se coloca en un campo magnético, los campos combinados serán similares a los que se muestran en la Figura 2.5.
4Lafond, A. “Énergie et machines électriques”, 5e édition, Université de Sherbrooke, Canada, 2010.
26
Figura 2.4 Regla de la mano izquierda para conductores que llevan corriente
La dirección del flujo de corriente a través del conductor se indica con una "x" o un ".". La "x" indica que el flujo de corriente se aleja del lector o entra en la página. El "•" indica que el flujo de corriente es hacia el lector o fuera de la página.
Figura 2.5 conductor portador de corriente en un campo magnético Arriba del conductor a la izquierda, el campo causado por el conductor está en dirección opuesta al campo principal y, por lo tanto, se opone al campo principal. Debajo del conductor a la izquierda, el campo causado por el conductor está en la misma dirección que el campo
27
principal y, por lo tanto, ayuda al campo principal. El resultado neto es que por encima del conductor se debilita el campo principal o se reduce la densidad de flujo; debajo del conductor, el campo se fortalece o la densidad de flujo aumenta. Se desarrolla una fuerza sobre el conductor que mueve el conductor en la dirección del campo debilitado (hacia arriba).
Arriba del conductor a la derecha, el campo causado por el conductor está en la misma dirección que el campo principal y, por lo tanto, ayuda al campo principal. Debajo del conductor a la derecha, el campo causado por el conductor está en dirección opuesta al campo principal y, por lo tanto, se opone al campo principal. El resultado neto es que por encima del conductor el campo se fortalece o la densidad de flujo aumenta, y debajo del conductor, el campo se debilita o la densidad de flujo disminuye. Se desarrolla una fuerza sobre el conductor que lo mueve en la dirección del campo debilitado (hacia abajo).
En un motor de CC, el conductor se formará en un bucle de modo que dos partes del conductor estén en el campo magnético al mismo tiempo, como se muestra en la Figura 2.6.
Se puede pensar en estas líneas de fuerzas magnéticas como bandas elásticas que siempre intentan acortarse. Las líneas de fuerza sobre el conductor ejercen una fuerza hacia abajo debido a que las líneas de fuerza magnéticas intentan enderezarse.
28
Figura 2.6 Acción del motor5
La explicación anterior de cómo se desarrolla una fuerza es conveniente; sin embargo, es algo artificial. Se basa en un principio fundamental de la física que puede enunciarse como sigue: "Un conductor que lleva corriente en un campo magnético tiende a moverse en ángulo recto con respecto a ese campo". Otra forma importante de mostrar la relación entre el conductor que transporta corriente, el campo magnético y el movimiento es la regla de la mano derecha para motores, como se muestra en la figura 2.7.
La regla de la mano derecha para motores muestra la dirección en la que se mueve un conductor que lleva corriente en un campo magnético. Cuando el dedo índice apunta en la dirección de las líneas del campo magnético y el dedo medio apunta en la dirección del flujo de corriente, el pulgar apuntará en la dirección de la fuerza (movimiento).
5 Ahmad A, and Taib M N, 2003, A study On the DC Motor Speed Control by Using BackEMF
pag. 45 – 67 [8]
29
Figura 2.7 Regla de la mano derecha para motores 2.2.3 TORQUE
El par se define como la fuerza que tiende a producir y mantener la rotación. La función del par en un motor de CC es proporcionar la salida mecánica o impulsar el equipo al que está conectado el motor de CC.
Cuando se aplica un voltaje a un motor, la corriente fluirá a través del devanado de campo, estableciendo un campo magnético. La corriente también fluirá a través del devanado del inducido, desde la escobilla negativa a la escobilla positiva, como se muestra en la Figura 2.8.
Dado que la armadura es un conductor que transporta corriente en un campo magnético, se ejerce una fuerza sobre el conductor que tiende a moverlo en ángulo recto con respecto a ese campo. Usando la regla de la izquierda para conductores que llevan corriente, se verá que el campo magnético de un lado se fortalece en la parte inferior, mientras que se debilita en el otro lado.
30
Figura 2.8 Corriente de armadura en un motor DC básico
Usando la regla de la mano derecha para motores, podemos ver que se ejerce una fuerza sobre la armadura que tiende a girar la armadura en sentido antihorario. La suma de las fuerzas, en libras, multiplicada por el radio de la armadura, en pies, es igual al par desarrollada por el motor en libras-pie (lb - ft).
Es evidente a partir de la Figura 2.8 que si la corriente de armadura se invirtiera, pero el campo fuera el mismo, el par se desarrollaría en la dirección opuesta. Asimismo, si la polaridad del campo se invirtiera y la armadura permaneciera igual, el par también se desarrollaría en la dirección opuesta.
La fuerza que se desarrolla sobre un conductor de la armadura de un motor se debe a la acción combinada de los campos magnéticos. La fuerza desarrollada es directamente proporcional a la fuerza del flujo de campo principal y la fuerza del campo alrededor del conductor de la armadura. Como sabemos, la intensidad del campo alrededor de cada conductor del inducido depende de la cantidad de corriente que
31
fluye a través del conductor del inducido. Por lo tanto, el par que desarrolla el motor se puede determinar usando la Ecuación (1).
𝑇 = 𝐾∅𝐼
𝐴(1)
T = Torque, lb-ft
K = Una constante que depende del tamaño físico del motor ɸ = Flujo magnético, número de líneas de fuerza por polo 𝐼𝐴 = 𝐶𝑜𝑟𝑟𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎
2.2.4 ACCIÓN DEL GENERADOR EN UN MOTOR6
En cada motor se desarrolla una acción generadora. Cuando un conductor corta líneas de fuerza, se induce un FEM en ese conductor.
La corriente para iniciar el giro del inducido fluirá en la dirección determinada por la fuente de alimentación de CC aplicada. Después de la rotación arranca, el conductor corta lineas de fuerza. Al aplicar la regla de la mano izquierda para generadores, la FEM que se induce en la armadura producirá una corriente en la dirección opuesta.
La FEM inducida, como resultado de la operación del motor, se denomina fuerza contraelectromotriz o CEMF, como se ilustra en la Figura 2.9.
6 Ahmad A, and Taib M N, 2003, A study On the DC Motor Speed Control by Using BackEMF
pag. 145 – 160 [8]
32
Figura 2.9 Fuerza Contraelectromotriz (CFEM)
Dado que el CFEM es generado por la acción de las líneas de fuerza de corte del inducido, el valor del CFEM dependerá de la intensidad del campo y la velocidad del inducido, como se muestra en la Ecuación (2).
𝐸
𝐶𝐹𝐸𝑀= 𝐾∅𝑁
(2)Donde:
𝐸𝐶𝐹𝐸𝑀 = 𝐶𝑜𝑛𝑡𝑎𝑑𝑜𝑟 𝑑𝑒 𝐹𝐸𝑀 K = Constante
Ø
= Fuerza de flujo de campo N = Velocidad de la armaduraEl CFEM se opone al voltaje aplicado y funciona para reducir la corriente de armadura. El voltaje efectivo que actúa en la armadura de un motor es el voltaje aplicado, menos el contador EMF. La corriente de armadura se puede encontrar usando la ley de Ohm, como se muestra en la Ecuación (3).
𝐼
𝐴=
𝐸𝑡−𝐸𝐶𝐹𝐸𝑀𝑅𝐴
(3)
33
Donde 𝐼𝐴 = 𝐶𝑜𝑟𝑟𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎 𝐸𝑡= 𝑉𝑜𝑙𝑡𝑎𝑗𝑒 𝑡𝑒𝑟𝑚𝑖𝑛𝑎𝑙
𝐸𝐶𝐹𝐸𝑀 = 𝐶𝑜𝑛𝑡𝑎𝑑𝑜𝑟 𝑑𝑒 𝑐𝑎𝑚𝑝𝑜𝑠 𝑚𝑎𝑔𝑛é𝑡𝑖𝑐𝑜𝑠 𝑅𝐴 = 𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑐𝑖𝑎 𝑑𝑒 𝑎𝑟𝑚𝑎𝑑𝑢𝑟𝑎
2.2.5 VELOCIDAD DEL MOTOR DE CC7
El campo de un motor de CC se varía utilizando dispositivos externos, generalmente resistencias de campo. Para un voltaje constante aplicado al campo (E), a medida que la resistencia del campo (Rf) disminuye, la cantidad de flujo de corriente a través del campo (If) aumenta como lo muestra la ley de Ohm en la Ecuación (4).
(4)
Un aumento en la corriente de campo hará que aumente el flujo de campo (Φf). Por el contrario, si aumenta la resistencia del campo, el flujo de campo disminuirá. Si el flujo de campo de un motor de CC disminuye, la velocidad del motor aumentará. La reducción de la intensidad de campo reduce la CFEM del motor, ya que los conductores del inducido cortan menos líneas de flujo, como se muestra en la ecuación (5).
(5)
Una reducción de la FEM contraria permite un aumento en la corriente de armadura como se muestra en la Ecuación (6).
7 Ahmad A, and Taib M N, 2003, A study On the DC Motor Speed Control by Using BackEMF
pag. 200 –207 [8]
34
(6)
Este aumento en la corriente del inducido hace que se desarrolle un par mayor; el aumento en la corriente de armadura más que compensa la disminución en el flujo de campo como se muestra en la Ecuación (7).
(7)
Este mayor par hace que el motor aumente su velocidad.
Este aumento de velocidad aumentará proporcionalmente el CFEM.
La velocidad y CFEM continuarán aumentando hasta que la corriente de armadura y el par se reduzcan a valores lo suficientemente grandes como para alimentar la carga a una nueva velocidad constante.
2.2.6 MÉTODOS DE CONTROL DE VELOCIDAD DE MOTORES DE CC.
EN DERIVACIÓN
(i) Método de control de flujo (ii) método de control de armadura (iii) Método de control de voltaje 1. Método de control de flujo:
Se basa en el hecho de que al variar el flujo f, se puede cambiar la velocidad del motor (N vs 1/f) y de ahí el nombre de método de control
35
de flujo. En este método, una resistencia variable (conocida como reóstato de campo en derivación) se coloca en serie con el devanado de campo en derivación, como se muestra en la Figura 2.10.
Figura 2.10 control de velocidad con y sin reóstato de campo
El reóstato de campo de derivación reduce la corriente de campo de derivación Ish y, por lo tanto, el flujo f. Por lo tanto, solo podemos aumentar la velocidad del motor por encima de la velocidad normal (ver figura 2.10). Generalmente, este método permite aumentar la velocidad en la relación 3:1. Rangos de velocidad más amplios tienden a producir inestabilidad y mala conmutación.
Ventajas del método de control de flujo:
(i) Este es un método fácil y conveniente.
(ii) Es un método económico ya que se desperdicia muy poca energía en el reóstato del campo de derivación debido a un valor relativamente pequeño de Ish.
(iii) El control de velocidad ejercido por este método es independiente de la carga en la máquina.
Desventajas del método de control de flujo:
36
(i) Solo se pueden obtener velocidades superiores a la velocidad normal, ya que la resistencia total del circuito de campo no se puede reducir por debajo de Rsh, la resistencia del devanado de campo en derivación.
(ii) Hay un límite a la velocidad máxima que se puede obtener por este método. Es porque si el flujo se debilita demasiado, la conmutación se vuelve más pobre.
Nota: El campo de un motor de derivación en funcionamiento nunca debe abrirse porque su velocidad aumentará a un valor extremadamente alto.
2. Método de control de armadura:
Este método se basa en el hecho de que al variar el voltaje disponible en la armadura, se puede cambiar la fuerza contraelectromotriz y, por lo tanto, la velocidad del motor. Esto se hace insertando una resistencia variable RC (conocida como resistencia del controlador) en serie con la armadura como se muestra en la figura 2.11.
Figura 2.11 control de velocidad con y sin reóstato de armadura
37
Debido a la caída de tensión en la resistencia del controlador, la f.e.m.
(Eb) es disminuido Desde que N vs Eb, la velocidad del motor se reduce. La velocidad más alta que se puede obtener es la correspondiente a RC = 0, es decir, la velocidad normal. Por lo tanto, el método de control de armadura solo puede proporcionar velocidades por debajo de la velocidad normal (ver Figura 2.11).
8Desventajas del método de control de armadura:
(i) Se desperdicia una gran cantidad de potencia en la resistencia del controlador, ya que transporta la corriente de armadura completa Ia.
(ii) La velocidad varía ampliamente con la carga, ya que la velocidad depende de la caída de voltaje en la resistencia del controlador y, por lo tanto, de la corriente de armadura demandada por la carga.
(iii) La salida y la eficiencia del motor se reducen.
(iv) Este método da como resultado una mala regulación de la velocidad.
Debido a las desventajas anteriores, el método de control de armadura rara vez se usa para controlar la velocidad de los motores de derivación.
Nota: El método de control de armadura es un método muy común para el control de la velocidad de motores de corriente continua en
8 Ahmad A, and Taib M N, 2003, A study On the DC Motor Speed Control by Using BackEMF
pag. 213 – 216 [8]
38
serie. La desventaja de una mala regulación de la velocidad no es importante en un motor en serie que se usa solo cuando se requiere un servicio de velocidad variable.
3. Método de control de voltaje:
En este método, la fuente de tensión que suministra la corriente de campo es diferente de la que alimenta el inducido. Este método evita las desventajas de una mala regulación de la velocidad y una baja eficiencia como en el método de control del inducido. Sin embargo, es bastante costoso. Por lo tanto, el método de control de velocidad de control de voltaje se emplea para motores de gran tamaño donde la eficiencia es de gran importancia.
(i) Control de voltaje múltiple: en este método, el campo de derivación del motor está conectado permanentemente a través de una fuente de voltaje fijo. La armadura se puede conectar a través de varios voltajes diferentes a través de un interruptor adecuado.
De esta manera, se puede cambiar el voltaje aplicado a través de la armadura. La velocidad será aproximadamente proporcional al voltaje aplicado a través de la armadura. Las velocidades intermedias se pueden obtener por medio de un regulador de campo de derivación.
(ii) Sistema Ward-Leonard:
En este método de Ward-Leonard, el voltaje ajustable para la armadura se obtiene de un generador de voltaje ajustable mientras que el circuito de campo se alimenta de una fuente separada. Esto
39
se ilustra en la Figura 2.12. El inducido del motor en derivación M (cuya velocidad se va a controlar) está conectado directamente a una fuente de c.c. El generador G es accionado por un generador c.a. de velocidad constante, motor A. El campo del motor de derivación se alimenta de un excitador de voltaje constante E. El campo del generador G también se alimenta del excitador E.
El voltaje del generador G se puede variar por medio de su regulador de campo. Al invertir la corriente de campo del generador G mediante el controlador FC, se puede invertir el voltaje aplicado al motor. A veces, se incluye un regulador de campo en el circuito de campo del motor de derivación M para un ajuste de velocidad adicional. Con este método, el motor puede funcionar a cualquier velocidad hasta su velocidad máxima.
Ventajas del sistema Ward-Leonard:
(a) La velocidad del motor se puede ajustar en un amplio rango sin pérdidas de resistencia, lo que da como resultado una alta eficiencia.
(b) El motor puede detenerse rápidamente, simplemente reduciendo rápidamente el voltaje del generador G. Cuando el voltaje del generador se reduce por debajo de la fuerza contraelectromotriz. del motor, esta f.e.m. trasera envía corriente a través de la armadura del generador, estableciendo un frenado dinámico. Mientras esto ocurre, el generador G funciona como un motor que acciona el motor A que devuelve energía a la línea.
40
Figura 2.12 sistema de control de velocidad Ward – Leonard (c) Este método se utiliza para el control de velocidad de motores grandes cuando se utiliza una corriente continua, el suministro no está disponible.
La desventaja del sistema Ward-Leonard es que se requiere un conjunto motor-generador especial para cada motor y las pérdidas en este conjunto son altas si el motor está operando bajo cargas livianas durante períodos prolongados.
2.2.7 MÉTODOS DE CONTROL DE VELOCIDAD DE MOTORES DE CC.
EN SERIE9
El control de velocidad de los motores de c.c. en serie se pueden obtener por:
(i) Método de control de flujo
(ii) Método de control de resistencia de armadura.
1. Método de control de flujo:
9 Ahmad A, and Taib M N, 2003, A study On the DC Motor Speed Control by Using BackEMF
pag. 245 – 267 [8]
41
En este método, el flujo producido por el motor en serie varía y, por lo tanto, la velocidad. La variación de flujo se puede lograr de las siguientes maneras:
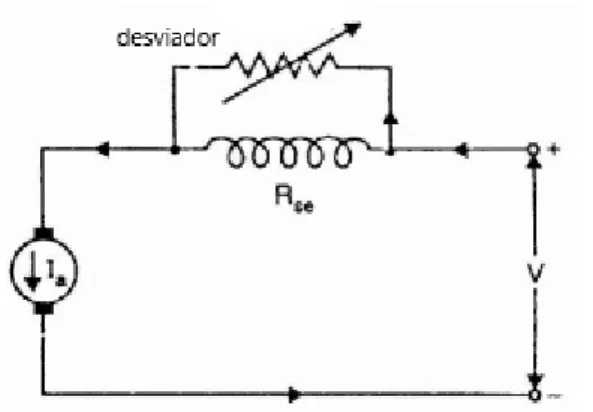
(i) Desviadores de campo:
Figura 2.13 control de flujo con desviación
En este método, una resistencia variable (llamada desviador de campo) se conecta en paralelo con un devanado de campo en serie como se muestra en la Figura 2.13. Su efecto es derivar una parte de la corriente de línea del devanado de campo en serie, debilitando así el campo y aumentando la velocidad (N vs 1/f). La velocidad más baja que se puede obtener es la correspondiente a corriente cero en el desviador (es decir, el desviador está abierto). Obviamente, la velocidad más baja que se puede obtener es la velocidad normal del motor. En consecuencia, este método solo puede proporcionar velocidades superiores a la velocidad normal. El método de desviación de campo en serie se emplea a menudo en trabajos de tracción.
ii) Desviador de armadura: para obtener velocidades por debajo de la velocidad normal, se conecta una resistencia variable (llamada
42
desviadora de armadura) en paralelo con la armadura como se muestra en la Figura 2.14. El desviador desvía parte de la corriente de línea, reduciendo así la corriente de armadura. Ahora, para una carga dada, si Ia disminuye, el flujo f debe aumentar (Q T vs fIa). Dado que N vs 1/f, la velocidad del motor disminuye. Al ajustar el desviador del inducido, se puede obtener cualquier velocidad inferior a la velocidad normal.
Figura 2.14 Control de desviación shunt10
iii) Control de campo con tomas: en este método, el flujo se reduce (y por lo tanto se aumenta la velocidad) al disminuir el número de vueltas del devanado de campo en serie, como se muestra en la Figura 2.15.
El interruptor S puede cortocircuitar cualquier parte del devanado de campo, disminuyendo así el flujo y aumentando la velocidad. Con giros completos del devanado de campo, el motor funciona a velocidad normal y, a medida que se cortan los giros de campo, se alcanzan velocidades superiores a la velocidad normal.
10 R. Nagarajan, S. Sathishkumar, S. Deepika, G. Keerthana, J.K. Kiruthika and R. Nandhini,
“Implementation of chopper fed speed control of separately excited DC motor using PI controller”249 [16]
43
Figura 2.15 control de campo con tomas
(iv) Bobinas de campo en paralelo: este método generalmente se emplea en el caso de motores de ventiladores. Al reagrupar las bobinas de campo como se muestra en la figura 2.16, se pueden obtener varias velocidades fijas.
Figura 2.16 Bobinas de campo en paralelo 2. Control de resistencia de armadura:
En este método, una resistencia variable se conecta directamente en serie con el suministro al motor completo, como se muestra en la figura 2.17. Esto reduce el voltaje disponible a través de la armadura y, por lo tanto, la velocidad cae. Al cambiar el valor de la resistencia variable, se puede obtener cualquier velocidad por debajo de la velocidad normal. Este es el método más común empleado para controlar la velocidad de la corriente continua, motores de serie.
44
Figura 2.17 Resistencia en serie al motor Aunque el método de control de resistencia de armadura tiene una regulación de velocidad deficiente, esto no tiene importancia para los motores en serie porque se utilizan en aplicaciones de velocidad variable. La pérdida de potencia en la resistencia en serie para muchas aplicaciones de motores en serie no es demasiado grave ya que en estas aplicaciones, el control se utiliza durante una gran parte del tiempo para reducir la velocidad en condiciones de carga ligera y solo se utiliza de forma intermitente cuando el motor está a plena carga.
2.2.8 CONTROLADOR
El controlador en un módulo eléctrico se usa típicamente para controlar la velocidad de los motores. El control de velocidad del motor se puede lograr de varias maneras. Los motores sin escobillas suelen utilizar una forma de conmutación electrónica con componentes electrónicos sofisticados que envían señales de CA muy precisas al motor. Esto a menudo requiere un inversor y un variador de frecuencia (VFD). El control de velocidad del motor con escobillas se puede lograr a través de modulación de ancho de pulso (PWM), variación de
45
voltaje de armadura o debilitamiento de campo, todo lo cual se explica con más detalle en la presente tesis. Los métodos VFD y PWM de control de velocidad en motores han sido complejos y también costosos. La complejidad y los costos surgen de la necesidad de encender y apagar el flujo de corriente de manera controlada. Debido a que se necesita una gran cantidad de potencia para propulsar un vehículo, se deben suministrar grandes cantidades de corriente al motor. 11Esto también impone la necesidad de que los controladores puedan manejar grandes corrientes. Dado que la energía es el producto del voltaje por la corriente, en el diseño del controlador, muchos sistemas utilizan un voltaje operativo mayor como un intento de mantener la energía eléctrica, al tiempo que reducen la corriente y, por lo tanto, reducen el precio de un controlador aún más costoso. Sin embargo, este alto voltaje tiene implicaciones de seguridad. Por encima de 60 V, el módulo eléctrico puede ser potencialmente peligroso para operadores y técnicos que interactúan con el módulo eléctrico.
Usando motores de CC y debilitamiento de campo para el control de velocidad, puede ser posible eliminar la necesidad de un controlador costoso y, al mismo tiempo, reducir el voltaje operativo del sistema.
11 R. Nagarajan, S. Sathishkumar, S. Deepika, G. Keerthana, J.K. Kiruthika and R. Nandhini,
“Implementation of chopper fed speed control of separately excited DC motor using PI controller”, 344 - 347
46
El voltaje operativo más bajo utilizado en este enfoque puede reducir el riesgo potencial de seguridad del alto voltaje para los consumidores y técnicos.
2.2.9 GENERALIDADES DEL MOTOR DE DERIVACIÓN
Los motores de corriente continua (CC) convierten la energía eléctrica en energía mecánica. Los motores de CC son inherentemente de alta velocidad y bajo par. Tienen características variables y se usan ampliamente con variadores de velocidad. Las máquinas de corriente continua se caracterizan por su versatilidad. Por medio de varias combinaciones de devanados de campo excitados en derivación, en serie y por separado. Pueden diseñarse para mostrar una amplia variedad de características de voltios-amperios o velocidad-torque para operaciones dinámicas y de estado estable. Los motores de CC encuentran aplicaciones en industrias tales como vehículos eléctricos, plantas laminadoras de acero, grúas eléctricas, manipuladores robóticos y electrodomésticos donde se requiere control de velocidad y/o posición del motor.
El motor de derivación recibe su nombre de cómo está configurado.
El devanado de campo está conectado en paralelo a la armadura. Por lo tanto, se aplica el mismo voltaje a ambos devanados. El motor de derivación es el más utilizado ya que tiene características lineales de voltaje y par. El motor tiene una buena regulación de velocidad incluso cuando varía la carga.
47
La velocidad del motor de derivación de CC se puede regular de dos maneras: la primera es insertando una resistencia en serie con la armadura, lo que reduce la velocidad. La segunda es insertando resistencia en el circuito de campo, la velocidad variará con cada cambio de carga. En este último, la velocidad es prácticamente constante para cualquier ajuste del controlador. Un sistema de control de velocidad de alta calidad hace que el motor de derivación de CC sea adecuado para aplicaciones industriales de velocidad ajustable, como máquinas herramienta, máquinas de bobinado/desbobinado. Muchos ejemplos típicos se encuentran en vehículos eléctricos, manipuladores robóticos, laminado, fresado, corte y roscado de acerías debido a las características de control preciso y continuo. El proceso de accionamientos de velocidad variable se puede lograr mediante el control del voltaje del inducido para la velocidad por debajo del valor nominal o por campo. variación de excitación para velocidades superiores a las nominales. La revisión de este documento se centrará en el motor de derivación.
2.2.10 MODELO DEL MOTOR DE CC EN DERIVACIÓN
La Figura 2.18 es un circuito equivalente simplificado para un motor de derivación.
Donde todos los términos son como se definen para el motor en serie.
más:
IF = corriente de campo, A IA = corriente de armadura, A
En estado estacionario, la ecuación I-V que describe este circuito es:
48
𝑉 = 𝜀
𝐴(𝐼
𝐹, 𝑊) + 𝐼
𝐴𝑅
𝐴ec. 2.1
𝑉 = 𝐼
𝐹𝑅
𝐹ec. 2.2
Figura 2.18 Circuito equivalente del motor shunt12
La FEM es igual a
: 𝜀
𝐴(𝐼
𝐹, 𝑊) = 𝑀
𝐴𝐹+ 𝐼
𝐹𝑊
ec. 2.3 La corriente terminal, es igual a:𝐼 = 𝐼
𝐴+𝐼
𝐹ec. 2.4 El par motor bruto, T, que es igual al par de pérdida del eje más el par de carga, está relacionado con las dos corrientes del motor por:
𝑇 = 𝑇
𝐿𝑜𝑎𝑑+ 𝑇
𝐿𝑂𝑆𝑆= 𝑀
𝐴𝐹𝐼
𝐴𝐼
𝐹ec. 2.5
La ecuación 2.6 es una expresión del voltaje en términos de par, velocidad y constantes del motor. Se obtiene sustituyendo las Ecs.
2.1, 2.4 y 2.5 en la ecuación. 2.3 para eliminar IA e IF Una vez que se conoce el voltaje, se calcula I sustituyendo inversamente las ecuaciones. 2.5, 2.2 y el voltaje, V, en la ecuación. 2.4.
12 R. Nagarajan, S. Sathishkumar, S. Deepika, G. Keerthana, J.K. Kiruthika and R. Nandhini,
“Implementation of chopper fed speed control of separately excited DC motor using PI controller” pag. 344 - 367
49
13Figura 2.19 Curva I -V del motor shunt
La Figura 2.19 muestra la característica I-V de un motor CC de derivación nominal de 1 1/4 hp (930 W), 1800 RPM máximo superpuesto a las curvas que se muestran en la Figura 2.20. El motor de derivación está conectado a la misma carga de ventilador centrífugo que se usa en serie.
13 [16] R. Nagarajan, S. Sathishkumar, S. Deepika, G. Keerthana, J.K. Kiruthika and R.
Nandhini, “Implementation of chopper fed speed control of separately excited DC motor using PI controller” pag. 365
50
Figura 2.20 Curva I-V motor serie14 2.3 HIPÓTESIS GENERAL E HIPÓTESIS ESPECIFICA
2.3.1 HIPÓTESIS GENERAL
1. Mediante el modelado y simulación utilizando el PSIM se obtendrá UNA GRÁFICA LINEAL del control de velocidad para motores de corriente contínua y la variación de la resistencia de campo.
2.3.2 HIPÓTESIS ESPECÍFICAS
1. Mediante el modelado y simulación utilizando el PSIM se obtendrá UNA GRÁFICA NO LINEAL del control de velocidad y la variación del voltaje de armadura para motores de corriente contínua.
2.4 VARIABLES
Definición de la Variables.
se han identificado las siguientes variables:
14 R. Nagarajan, S. Sathishkumar, S. Deepika, G. Keerthana, J.K. Kiruthika and R. Nandhini,
“Implementation of chopper fed speed control of separately excited DC motor using PI controller” pag. 366
51 2.4.1 INDEPENDIENTE:
Variable X = Mediante el modelado y simulación utilizando
PSIM
2.4.2 DEPENDIENTE
Variable Z = Obtención de la gráfica del control de
velocidad para motores de corriente contínua
52
CAPITULO 3
1. METODOLOGÍA DE LA INVESTIGACIÓN 3.1 TIPOS DE ESTUDIO Y MÉTODO DE INVESTIGACIÓN
Metodología: Se tomó como base reportes e informes sobre los diversos centros donde abundan motores de corriente continua adheridos a un control de velocidad implementado en base a titristores; como por ejemplo (centros de computo, laboratorios hospitalarios, auto partes, etc.) en la región Junin.
Bibliográfico: Se explora la producción de la comunidad académica sobre un tema determinado. Supone un conjunto de actividades encaminadas a localizar documentos relacionados con un tema o un autor concretos.
Tipo de investigación
Método científico: es un método de investigación usado principalmente en la producción de conocimiento en las ciencias. Para ser llamado científico, un método de investigación debe basarse en lo empírico y en la medición, y estar sujeto a los principios específicos de las pruebas de razonamiento.
53 3.2 POBLACIÓN Y MUESTRA
3.2.1 Población; los Hospitales (laboratorios clínicos), auto partes, instrumentación (aviación, marina).
3.2.2 Muestra
Como muestra se tiene el Hospital Regional III de Essalud Huancayo (laboratorio clínico, rayos X).
3.3 MÉTODOS DE RECOLECCIÓN DE DATOS
Los datos son la información que se recopila con el fin de responder a las preguntas de la investigación. El tipo de datos que necesita depende de los objetivos de la investigación.
Los datos recopilados en la presente tesis son datos técnicos referidos al motor trifásico.
3.4 INSTRUMENTOS DE RECOPILACIÓN DE DATOS
Hay muchas maneras de recolectar información en una investigación, puede ser escrita, oral; en la presente tesis se recopilo los datos en forma práctica.
Los datos prácticos se ha aquirido mediante instrumentos de medición.
Como los voltímetros digitales, amperímetros analógicos y digitales, tacómetros, torquímetros, frecuencímetros, osciloscopios y una laptop conteniendo el software PSIM.
54
CAPÍTULO 4
PRESENTACIÓN DE RESULTADOS
4.1 DATOS Y RESULTADOS DE LA INVESTIGACIÓN GENERALIDADES 4.1.1 CONTROL DE VELOCIDAD MEDIANTE TIRISTOR
La Figura 4.1 muestra el diagrama de bloques de un control de velocidad DC usando tiristor. El tiristor se usa para controlar la velocidad del motor al suministrarle voltaje de CC variable.
Figura 4.1 Diagrama de bloques del control de velocidad de un motor D.C. usando tiristores
El tiristor convertidor de CA a CC con fase angular es popular para motores de CC de gran tamaño. Se requiere un convertidor completo de tiristores de cuatro cuadrantes del circuito de armadura y un convertidor de dos cuadrantes del circuito de campo para una unidad de alto rendimiento con un amplio rango de velocidad. La figura 4.2
55
muestra el accionamiento del convertidor de puente de tiristores monofásico.
Figura 4.2 Convertidor de puente de tiristores monofásico
Considere el variador de CC que se muestra en la Figura 2, que se usa con el voltaje Vav de suministro del inducido al motor y viene dado por la siguiente ecuación:
𝑉
𝑎𝑣𝑒=
2𝑉𝑚𝜋
(𝐶𝑜𝑠𝛼)
ec. 4.1Donde Vm es el valor pico de tensión de alimentación del convertidor de CA de línea a línea y α es el ángulo de disparo. El ángulo de disparo α controla el voltaje de salida CC Vave. A partir de la Ecuación (4.1), es fácil verificar el promedio Salida de voltaje de CC controlando el ángulo de disparo α. La velocidad de frecuencia del sensor estará por debajo de la frecuencia de referencia cuando la velocidad del motor sea baja. El tiristor provoca un cambio en el encendido al producir diferentes frecuencias Esto significa que el ángulo de disparo α se reduce y la velocidad del motor aumentará para mantener la coincidencia entre la frecuencia de referencia y la velocidad de salida.
56
Cuando la frecuencia de salida de la velocidad es más alta que la frecuencia de referencia, el circuito de disparo se modificará para permitir que el SCR reduzca la velocidad del motor de CC y conduzca por un tiempo más corto
4.1.2 CONTROL DE VELOCIDAD MEDIANTE UN MOTOR DE IMPULSOR DE CHOPPER REDUCTOR
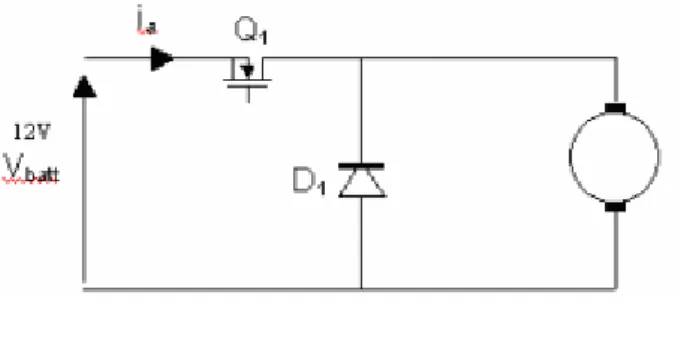
Los servomotores impulsan convertidores de CC a CC que utilizan un controlador de interruptor modulado por ancho de pulso de ciclo de trabajo son muy populares. La Figura 4.3 muestra un circuito de motor simple.
Figura 4.3 Circuito de motor simple
El motor suministra 0 V cuando el interruptor está abierto y 12 V cuando está cerrado. El motor girará lentamente cuando el interruptor esté abierto y cerrado por la misma cantidad de tiempo ganando 6V.
Los MOSFET de potencia realizan la conmutación de ENCENDIDO y APAGADO, que puede encender o apagar corrientes altas usando un controlador de bajo voltaje. La Figura 4.4 muestra el voltaje promedio que alimenta el motor DC el cual está dado por
𝑉
𝑎𝑣𝑒=
𝑡𝑜𝑛𝑇
∗ 𝑉
𝑖𝑛ec. 4.2
57
Donde
𝑉
𝑎𝑣𝑒 está el suministro de voltaje promedio del motor de CC,𝑡
𝑜𝑛 es el tiempo de encendido de los interruptores, T es el período decorte y 𝑡𝑜𝑛
𝑇 el es el ciclo de trabajo del interruptor.
Figura 4.4 Señal chopper
El voltaje aumenta por el período de tiempo en que el interruptor está encendido en comparación con cuando el interruptor está apagado, y la velocidad promedio del motor aumentará. Dependiendo de la inercia del rotor, el motor necesita diferentes tiempos para acelerar o desacelerar. Básicamente, qué tan pesado es el rotor y cuánto par de carga y fricción hay. La figura 4.5 muestra la velocidad del motor que se enciende y se apaga lentamente.
Figura 4.5. Relación de la tensión de alimentación de la velocidad del motor
58
De la Figura 4.5, se puede ver que la velocidad promedio es de alrededor de 150 RPM. El motor no tendrá tiempo de cambiar su velocidad y permanecerá constante si el voltaje de suministro se cambia lo suficientemente rápido. Este es el principio del control de velocidad de modo de conmutación.
4.1.3 CIRCUITO DE PUENTE COMPLETO
Cada lado del motor se puede conectar al lado positivo o negativo de la batería. En cada lado del motor, solo se debe encender un MOSFET por vez. De lo contrario, la batería actuará como un cortocircuito. La figura 4.6 muestra el motor de puente completo.
Figura 4.6. Accionamiento de motor de puente completo
Al encender Q4, el motor irá hacia adelante y la señal PWM se aplicará a Q1. En el lado opuesto, para hacer que el motor retroceda, se debe encender Q3 y se debe aplicar la señal PWM a Q2.
59 4.2 PROCESAMIENTO DE LOS DATOS
PSIM es un paquete de simulación con una interfaz de usuario amigable y una simulación rápida diseñada explícitamente para control de motores y electrónica de potencia. Proporciona un entorno sólido para el control analógico y digital, la electrónica de potencia y los sistemas de accionamiento de motores. Cubre tres módulos, que son el módulo de control digital, el módulo de accionamiento del motor y el módulo acoplador SIM. En los estudios de accionamiento del sistema, el módulo de accionamiento del motor tiene una carga mecánica y módulos de máquina incorporados. El paquete de simulación de PSIM consta de tres programas, que son el programa de procesamiento de formas de onda SIMVIEW, el programa de esquemas de circuitos y el simulador. Una estructura de circuito se representa en PSIM en cuatro bloques, que son circuito de potencia, circuito de control, sensores y controladores de conmutación.
4.2.1 MOTOR DE CC CON UNA CARGA DE PAR CONSTANTE
La figura 4.7 muestra el circuito excitado por derivación de un motor de CC con un CTL de carga de par constante. El par de carga de la máquina gira hacia debido a la dirección del sistema mecánico. Para una velocidad positiva, se proporciona una salida positiva cuando el sensor de velocidad está en la dirección de referencia. La figura 4.7 muestra la velocidad y la corriente de armadura de la forma de onda de estimulación.
60
Figura 4.7 Motores de corriente continua con par constante
4.2.2 MÉTODO DE CONTROL DE VELOCIDAD DE RESISTENCIA DE CAMPO DEL MOTOR DE CC
Control de velocidad de motores DC por el método de resistencia de campo. Para el flujo, la resistencia en serie se utiliza para insertar en el circuito de campo de derivación de los motores mediante el control de la corriente de campo. Cuando cualquier valor de campo se selecciona la resistencia, la velocidad cambiará proporcionalmente con la resistencia de campo. En general, cuando aumenta la resistencia de campo, aumenta la velocidad, y cuando disminuye la resistencia de campo, disminuye la velocidad. Este método se considera importante en circuitos prácticos como se muestra en la Figura 4.8.
61
Figura 4.8. Control de velocidad del motor de CC mediante resistencia de campo
El control de velocidad de un motor de CC utilizando voltaje de armadura (voltaje variable). El voltaje aplicado Va en el circuito del inducido varía sin cambiar el voltaje aplicado al circuito del motor. La figura 4.9 muestra el motor excitado por separado usando voltaje de armadura. Cuando el voltaje de campo aumenta, la velocidad del motor aumenta. Se deben usar dos fuentes de CC diferentes para obtener una conexión excitada separada, una para la armadura y el segundo en el circuito de campo. Se han diseñado dos circuitos de motor de CC de control de velocidad. El primero es cambiando la resistencia de campo y el segundo es cambiando el voltaje de armadura.
62
Figura 4.9 Control de velocidad del motor de CC usando voltaje de Armadura
4.3 RESULTADOS DE LA SIMULACIÓN Los parámetros del motor:
P = 3.5KW V = 300V I = 15A N = 1500 RPM Ra = 0.6Ω La=0.006763H