UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
“SUPERVISIÓN Y CONTROL DE LAS INSTALACIONES ELÉCTRICAS DE DISTRIBUCIÓN MEDIANTE BUS DE
CAMPO”
TESIS
Para optar el Título Profesional de:
INGENIERO ELECTRICISTA
PRESENTADO POR:
Bach. Hugo Richard MATOS CAPCHA
Huancayo – Perú
2011
ASESOR
M.Sc. OVIDIO ASCENCIO CASTRO
DEDICATORIA
A mis padres, familiares y maestros por el esfuerzo depositado en mi persona para el logro de mis ideales profesionales.
ÍNDICE
DEDICATORIA --- 2
INDICE --- 3
RESUMEN --- 7
INTRODUCCION --- 8
CAPITULO I PLAN DE TESIS 1.1 TEMA--- 10
1.2 PLANTEAMIENTO Y FORMULACIÓN DEL PROBLEMA --- 10
1.2.1 Planteamiento --- 10
1.2.2 Formulación --- 11
1.3 OBJETIVOS --- 11
1.3.1 Objetivo general --- 11
1.3.2 Objetivos específicos --- 11
1.4 FORMULACIÓN DE HIPÓTESIS --- 12
1.5 METODOLOGÍA DE TRABAJO--- 12
CAPITULO II BUSES DE CAMPO 2.1 INTRODUCCIÓN --- 13
2.2 VENTAJAS DE LOS BUSES DE CAMPO --- 14
2.3 BUSES DE CAMPO EXISTENTES --- 16
2.3.1 Buses de alta velocidad y baja funcionalidad --- 16
2.3.2 Buses de alta velocidad y funcionalidad media --- 16
2.3.3 Buses de altas prestaciones --- 17
2.3.4 Buses para áreas de seguridad intrínseca --- 18
2.4 ALGUNOS BUSES ESTANDARIZADOS --- 19
2.4.1 PROFIBUS --- 19
2.4.2 INTERBUS --- 22
2.4.3 DeviceNet --- 23
2.4.4 FOUNDATION FIELDBUS --- 24
2.4.5 FIP-WorldFIP --- 25
2.4.6 LONWORKS --- 25
2.4.7 SDS --- 27
2.4.8 CANOpen --- 27
2.4.9 MODBUS --- 27
2.4.10 INDUSTRIAL ETHERNET --- 28
2.4.11 ASI --- 29
2.4.12 BITBUS --- 30
2.4.13 ARCNet --- 30
2.4.14 CONTROLNET --- 31
2.4.15 HART --- 31
CAPITULO III COMUNICACIÓN VÍA BUS 3.1 INTRODUCCIÓN --- 32
3.2 COMUNICACIÓN DIGITAL --- 33
3.2.1 Los protocolos de comunicación --- 38
3.2.1.1 El nivel físico --- 40
3.2.1.2 Nivel de transmisión de datos --- 47
3.2.1.3 Nivel de aplicación --- 48
3.2.1.4 Compatibilidad entre niveles --- 50
3.3 SUPERVISIÓN DE LAS INSTALACIONES ELÉCTRICAS DE DISTRIBUCIÓN --- 51
3.3.1 La supervisión con los interruptores automáticos --- 55
3.4 ELECCIÓN DE LOS PRODUCTOS PARA LA SUPERVISIÓN Y EL TELECONTROL --- 59
3.5 LA INTEGRACIÓN DE LOS INTERRUPTORES EN LOS BUSES DE CAMPO Profibus DP y DeviceNet --- 61
3.5.1 Supervisión y telecontrol --- 63
3.5.1.1 Interruptores abiertos Emax E1-E2-E3-E4-E6 --- 63
3.5.1.2 Interruptores abiertos Emax X1 y de caja moldeada Tmax T7 --- 64
3.5.1.3 Interruptores de caja moldeada Tmax T4-T5-T6 --- 66
CAPITULO IV APLICACIONES DE LOS INTERRUPTORES CON POSIBILIDAD DE DIALOGO 4.1 SUPERVISIÓN DE LAS PROTECCIONES Y MANIOBRA DE LOS INTERRUPTORES --- 69
4.2 ATRIBUCIÓN DE LOS COSTOS ENERGÉTICOS DE UNA INSTALACIÓN72
4.2.1 Descripción del sistema de distribución y comunicación --- 73
4.2.2 Principio de funcionamiento --- 74
4.3 GESTIÓN DE LAS CARGAS PRIORITARIAS Y NO PRIORITARIAS --- 75
CONCLUSIONES --- 78
RECOMENDACIONES --- 80
REFERENCIA BIBLIOGRÁFICA --- 81
ANEXOS --- 82
Anexo A: Medidas, datos y comandos para la supervisión y el telecontrol --- 83
Anexo B: Características eléctricas de la tensión de alimentación auxiliar --- 86
Anexo C: Módulos de comunicación --- 88
Anexo D: Módulos de medida --- 92
Anexo E: Contactos auxiliares AUX-E y mando motor MOE-E --- 74
RESUMEN
En el presente trabajo se explica el análisis que se ha realizado sobre la implementación de los interruptores automáticos en los relés de protección electrónicos y sus interfaces para el diálogo y la comunicación vía bus con aparatos de control como PC, PLC o SCADA, de esta forma, además de para la protección y la maniobra, los interruptores automáticos se utilizan para la supervisión y el control de las instalaciones eléctricas de distribución.
Se ofrece toda la información útil para la elección y el uso correctos de los relés de protección, de sus accesorios y del software necesarios para integrar los interruptores automáticos en los sistemas de supervisión de las instalaciones eléctricas y tecnológicas.
Este trabajo está dividido en las siguientes partes fundamentales: Introducción a la comunicación digital y conceptos básicos sobre los protocolos de comunicación, supervisión de las instalaciones eléctricas de distribución, solución para la comunicación vía bus y aplicaciones de los interruptores en la gestión automatizada de las instalaciones eléctricas de distribución.
También, se incluyen anexos en los que se profundiza en aspectos funcionales y aplicativos de los productos (módulos de comunicación, módulos de medida, contactos auxiliares electrónicos y conectores apropiados) de una empresa conocida, necesarios para las funciones de medida y de comunicación vía bus de los interruptores automáticos.
INTRODUCCIÓN
En la actualidad es de necesidad la utilización de sistemas de automatización y de supervisión de procesos industriales, por las grandes bondades que ofrecen al realizar una mejor gestión de las instalaciones eléctricas y tecnológicas, mediante interruptores automáticos implementados en los relés de protección electrónicos e interfaces para el diálogo y la comunicación vía bus con aparatos de control como microcomputador, controlador lógico programable y/o SCADA Supervisory Control And Data Acquisition (Supervisión, Control y Adquisición de Datos).
De esta forma, además de para la protección y la maniobra, los interruptores automáticos son utilizados para la supervisión y el control de las instalaciones eléctricas en este caso de distribución.
La tesis está dividida en cuatro partes, cada una de ellas nos da una amplia perspectiva de integración y explicación de cada apartado.
Los tópicos más importantes del Plan de Tesis se hacen referencia en el capítulo I, tales como: tema, planteamiento y formulación del problema, objetivos, formulación de hipótesis y la metodología de trabajo
En el capítulo II se trata sobre los buses de campo: ventajas de los buses de campo, buses de campo existentes y buses estandarizados.
En el capítulo III tenemos el marco teórico de la comunicación vía bus entre los cuales están: comunicación digital, supervisión de las instalaciones eléctricas de distribución, elección de los productos para la supervisión y el telecontrol y la integración de los interruptores en los buses de campo Profibus DP y DeviceNet
En el capítulo IV nos abocamos en tres ejemplos de aplicaciones de los interruptores con posibilidad de dialogo que son: supervisión de las protecciones y maniobra de los interruptores, atribución de los costos energéticos de una instalación y gestión de las cargas prioritarias y no prioritarias.
En la parte de anexos se tiene temas importantes sobre: medidas, datos y comandos para la supervisión y el telecontrol, características eléctricas de la tensión de alimentación auxiliar, módulos de comunicación, módulos de medida y, contactos auxiliares AUX-E y mando motor MOE-E.
CAPITULO I PLAN DE TESIS 1.1 TEMA
Modbus es un sistema de red de área local para aplicaciones de control industrial, los dispositivos conectados a la red pueden intercambiar mensajes para el control y la supervisión de los procesos en las ubicaciones remotas de una planta industrial.
El entorno que interviene en la comunicación Modbus son controladores programables e interfaces de red.
La red también proporciona medios eficaces para trabajar con subsistemas de entrada/salida, dentro de todo ello se ha elegido éste modo de red para la aplicación en sistemas de distribución eléctrica.
1.2 PLANTEAMIENTO Y FORMULACIÓN DEL PROBLEMA 1.2.1 Planteamiento
En la actualidad dentro de las instalaciones eléctricas de distribución no se tiene una supervisión eficiente de los diferentes parámetros eléctricos y no eléctricos de los diferentes dispositivos que componen una instalación, lo que hace que no se pueda tener un control total de éstas y de ese modo hace que tales
instalaciones tengan menor vida útil y mayor costo de operación y mantenimiento.
1.2.2 Formulación
¿Cómo se puede implementar interfaces para el diálogo y la comunicación vía bus con aparatos de control como PC, PLC o SCADA con el fin de controlar y supervisar los parámetros físicos presentes en las instalaciones eléctricas?
Variable independiente:
• Interfaz de dialogo para comunicación vía bus.
Variable dependiente:
• Control y supervisión de instalaciones eléctricas.
1.3 OBJETIVOS 1.3.1 Objetivo general
Pretender ofrecer toda la información útil para la elección y el uso correctos de los relés de protección, de los accesorios y del software necesarios para integrar los interruptores automáticos en los sistemas de supervisión de las instalaciones eléctricas.
1.3.2 Objetivos específicos
• Redes y protocolos de comunicación vía bus.
• Diálogo entre dispositivos electrónicos "inteligentes" y describir las funciones de los relés de protección electrónicos que permiten a los interruptores automáticos la comunicación vía bus.
1.4 FORMULACIÓN DE HIPÓTESIS
Si se utiliza interfaces para el dialogo y comunicación vía bus de campo con aparatos de control como PC, PLC o SCADA, entonces de esta forma, además de para la protección y la maniobra, los interruptores automáticos se utilizarían para la supervisión y el control de las instalaciones eléctricas de distribución.
1.5 METODOLOGÍA DE TRABAJO
Inicialmente se revisará la teoría de la comunicación digital y conceptos básicos sobre los protocolos de comunicación, del mismo modo que es lo que debe supervisar en las instalaciones eléctricas de distribución.
Se hará es estudio de los diferentes modos de comunicación vía bus de campo, y las diferentes interfaces que se encuentran en el mercado nacional, de los cuales se elegirá cuál de ellos se puede ajustar a nuestro propósito.
Al final se realizara una o más aplicaciones de los interruptores en la gestión automatizada de las instalaciones eléctricas de distribución.
CAPITULO II BUSES DE CAMPO 2.1 INTRODUCCIÓN
Un bus de campo es un sistema de transmisión de información (datos) que simplifica enormemente la instalación y operación de máquinas y equipamientos industriales utilizados en procesos de producción. El objetivo de un bus de campo es sustituir las conexiones punto a punto entre los elementos de campo y el equipo de control a través del tradicional bucle de corriente de 4-20 mA. Típicamente son redes digitales, bidireccionales, multipunto, montadas sobre un bus serie, que conectan dispositivos de campo como PLCs, transductores, actuadores y sensores.
Cada dispositivo de campo incorpora cierta capacidad de proceso, que lo convierte en un dispositivo inteligente, manteniendo siempre un costo bajo. Cada uno de estos elementos será capaz de ejecutar funciones simples de diagnóstico, control o mantenimiento, así como de comunicarse bidireccionalmente a través del bus.
El objetivo es reemplazar los sistemas de control centralizados por redes de control distribuido mediante el cual permita mejorar la calidad del producto, reducir los costos y mejorar la eficiencia. Para ello se basa en que la información que envían
y/o reciben los dispositivos de campo es digital, lo que resulta mucho más preciso que si se recurre a métodos analógicos. Además, cada dispositivo de campo es un dispositivo inteligente y puede llevar a cabo funciones propias de control, mantenimiento y diagnóstico. De esta forma, cada nodo de la red puede informar en caso de fallo del dispositivo asociado, y en general sobre cualquier anomalía asociada al dispositivo. Esta monitorización permite aumentar la eficiencia del sistema y reducir la cantidad de horas de mantenimiento necesarias.
2.2 VENTAJAS DE LOS BUSES DE CAMPO
La principal ventaja que ofrecen los buses de campo, y la que los hace más atractivos a los usuarios finales, es la reducción de costos. El ahorro proviene fundamentalmente de tres fuentes: ahorro en costo de instalación, ahorro en el costo de mantenimiento y ahorros derivados de la mejora del funcionamiento del sistema.
Una de las principales características de los buses de campo es su significativa reducción en el cableado necesario para el control de una instalación. Cada componente sólo requiere un cable para la conexión de los diversos nodos. Se estima que puede ofrecer una reducción de 5 a 1 en los costos de cableado. En comparación con otros tipos de redes, dispone de herramientas de administración del bus que permiten la reducción del número de horas necesarias para la instalación y puesta en marcha.
El hecho de que los buses de campo sean más sencillos que otras redes de uso industrial como por ejemplo MAP, hace que las necesidades de mantenimiento de la red sean menores, de modo que la fiabilidad del sistema a largo plazo aumenta.
Además, los buses de campo permiten a los operadores monitorizar todos los dispositivos que integran el sistema e interpretar fácilmente las interacciones entre ellos. De esta forma, la detección de las fuentes de problemas en la planta y su corrección resulta mucho más sencilla, reduciendo los costos de mantenimiento y el tiempo de parada de la planta.
Los buses de campo ofrecen mayor flexibilidad al usuario en el diseño del sistema.
Algunos algoritmos y procedimientos de control que con sistemas de comunicación tradicionales debían incluirse en los propios algoritmos de control, radican ahora en los propios dispositivos de campo, simplificando el sistema de control y sus posibles ampliaciones.
También hay que tener en cuenta que las prestaciones del sistema mejoran con el uso de la tecnología de los buses de campo debido a la simplificación en la forma de obtener información de la planta desde los distintos sensores. Las mediciones de los distintos elementos de la red están disponibles para todos los demás dispositivos. La simplificación en la obtención de datos permitirá el diseño de sistemas de control más eficientes.
Con la tecnología de los buses de campo, se permite la comunicación bidireccional entre los dispositivos de campo y los sistemas de control, pero también entre los propios dispositivos de campo.
Otra ventaja de los buses de campo es que sólo incluyen 3 capas (Física, Enlace y Aplicación), y un conjunto de servicios de administración. El usuario no tiene que preocuparse de las capas de enlace o de aplicación. Sólo necesita saber cual es
funcionalidad. Al usuario sólo se le exige tener un conocimiento mínimo de los servicios de administración de la red, ya que parte de la información generada por dichos servicios puede ser necesaria para la reparación de averías en el sistema. De hecho, prácticamente, el usuario sólo debe preocuparse de la capa física y la capa de usuario.
2.3 BUSES DE CAMPO EXISTENTES
Debido a la falta de estándares, diferentes compañías han desarrollado diferentes soluciones, cada una de ellas con diferentes prestaciones y campos de aplicación.
En una primera clasificación tenemos los siguientes grupos:
2.3.1 Buses de alta velocidad y baja funcionalidad
Están diseñados para integrar dispositivos simples como finales de carrera, fotocélulas, relés y actuadores simples, funcionando en aplicaciones de tiempo real, y agrupados en una pequeña zona de la planta, típicamente una máquina.
Básicamente comprenden las capas física y de enlace del modelo OSI, es decir, señales físicas y patrones de bits de las tramas. Algunos ejemplos son:
• CAN: Diseñado originalmente para su aplicación en vehículos.
• SDS: Bus para la integración de sensores y actuadores, basado en CAN
• ASI: Bus serie diseñado por Siemens para la integración de sensores y actuadores.
2.3.2 Buses de alta velocidad y funcionalidad media
Se basan en el diseño de una capa de enlace para el envío eficiente de bloques de datos de tamaño medio. Estos mensajes permiten que el dispositivo tenga mayor
funcionalidad de modo que permite incluir aspectos como la configuración, calibración o programación del dispositivo. Son buses capaces de controlar dispositivos de campo complejos, de forma eficiente y a bajo costo.
Normalmente incluyen la especificación completa de la capa de aplicación, lo que significa que se dispone de funciones utilizables desde programas basados en PCs para acceder, cambiar y controlar los diversos dispositivos que constituyen el sistema. Algunos incluyen funciones estándar para distintos tipos de dispositivos (perfiles) que facilitan la inter-operbilidad de dispositivos de distintos fabricantes. Algunos ejemplos son:
• DeviceNet: Desarrollado por Allen-Bradley, utiliza como base el bus CAN, e incorpora una capa de aplicación orientada a objetos.
• LONWorks: Red desarrollada por Echelon.
• BitBus: Red desarrollada por INTEL.
• DIN MessBus: Estándar alemán de bus de instrumentación, basado en comunicación RS-232.
• InterBus-S: Bus de campo alemán de uso común en aplicaciones medias.
2.3.3 Buses de altas prestaciones
Son capaces de soportar comunicaciones a nivel de todos los niveles de la producción CIM. Aunque se basan en buses de alta velocidad, algunos presentan problemas debido a la sobrecarga necesaria para alcanzar las características funcionales y de seguridad que se les exigen. La capa de aplicación tiene un gran número de servicios a la capa de usuario, habitualmente
un subconjunto del estándar MMS (Manufacturing Message Specification).
Entre sus características incluyen:
• Redes multi-maestro con redundancia.
• Comunicación maestro-esclavo según el esquema pregunta-respuesta.
• Recuperación de datos desde el esclavo con un límite máximo de tiempo
• Capacidad de direccionamiento unicast, multicast y broadcast,
• Petición de servicios a los esclavos basada en eventos.
• Comunicación de variables y bloques de datos orientada a objetos.
• Descarga y ejecución remota de programas.
• Altos niveles de seguridad de la red, opcionalmente con procedimientos de autentificación.
• Conjunto completo de funciones de administración de la red.
Algunos ejemplos son:
• Profibus
• WorldFIP
• Fieldbus Foundation
2.3.4 Buses para áreas de seguridad intrínseca
Incluyen modificaciones en la capa física para cumplir con los requisitos específicos de seguridad intrínseca en ambientes con atmósferas explosivas. La seguridad intrínseca es un tipo de protección por la que el componente en cuestión no tiene posibilidad de provocar una explosión en la atmósfera circundante. Un circuito eléctrico o una parte de un circuito tienen seguridad
intrínseca, cuando alguna chispa o efecto térmico en este circuito producidos en las condiciones de prueba establecidas por un estándar (dentro del cual figuran las condiciones de operación normal y de fallo específicas) no puede ocasionar una ignición. Algunos ejemplos son HART, Profibus PA o WorldFIP.
2.4 ALGUNOS BUSES ESTANDARIZADOS 2.4.1 PROFIBUS
Profibus se desarrolló bajo un proyecto financiado por el gobierno alemán. Está normalizado en Alemania por DIN E 19245 y en Europa por EN 50170. El desarrollo y posterior comercialización ha contado con el apoyo de importantes fabricantes com ABB, AEG, Siemens, Klóckner-Moeller, ... Está controlado por la PNO (Profibus User Organisation) y la PTO (Profibus Trade Organisation).
Existen tres perfiles:
• Profibus DP (Decentralized Periphery). Orientado a sensores/actuadores enlazados a procesadores (PLCS) o terminales.
• Profibus PA (Process Automation). Para control de proceso y cumpliendo normas especiales de seguridad para la industria química (IEC 1 1 15 8-2, seguridad intrínseca).
• Profibus FMS (Fieldbus Message Specification). Para comunicación entre células de proceso o equipos de automatización. La evolución de Profibus hacia la utilización de protocolos TCP/IP para enlace al nivel de proceso hace que este perfil esté perdiendo importancia.
Utiliza diferentes capas físicas. La más importante, en PROFIBUS DP, está basada en ElA RS-485. Profibús PA utiliza la norma IEC 11158-2 (norma de comunicación síncrona entre sensores de campo que utiliza modulación sobre la propia línea de alimentación de los dispositivos y puede utilizar los antiguos cableados de instrumentación 4-20 mA) y para el nivel de proceso se tiende a la utilización de Ethernet. También se contempla la utilización de enlaces de fibra óptica. Existen puentes para enlace entre diferentes medios, además de gateways que permiten el enlace entre perfiles y con otros protocolos.
Se distingue entre dispositivos tipo maestro y dispositivos esclavo. El acceso al medio entre maestros se arbitra por paso de testigo, el acceso a los esclavos desde un maestro es un proceso de interrogación cíclico (polling). Se pueden configurar sistemas multimaestro o sistemas más simples maestro-esclavo.
En Profibus DP se distingue entre: maestro clase 1 (estaciones de monitorización y diagnóstico), maestro clase 2 (elementos centralizadores de información como PLCS, PCs, etc.), esclavo (sensores, actuadores).
El transporte en Profibus-DP se realiza por medio de tramas según IEC 870-5-1.
La comunicación se realiza por medio de datagramas en modo broadcast o multicast. Se utiliza comunicación serie asíncrona por lo que es utilizable una UART genérica.
Profibus DP prescinde de los niveles ISO 3 a 6 y la capa de aplicación ofrece una amplia gama de servicios de diagnóstico, seguridad, protecciones etc. Es
una capa de aplicación relativamente compleja debido a la necesidad de mantener la integridad en el proceso de paso de testigo (un y sólo un testigo) Profibus FMS es una compleja capa de aplicación que permite la gestión distribuida de procesos al nivel de relación entre células don posibilidad de acceso a objetos, ejecución remota de procesos etc. Los dispositivos de definen como dispositivos de campo virtuales, cada uno incluye un diccionario de objetos que enumera los objetos de comunicación. Los servicios disponibles son un subconjunto de los definidos en MMS (ISO 9506)
Las plataformas hardware utilizadas para soportar Profibus se basan en microprocesadores de 16 bits más procesadores de comunicaciones especializados o circuitos ASIC como el LSPM2 de Siemens. La PNO se encarga de comprobar y certificar el cumplimiento de las especificaciones PROFIBUS.
Entre sus perspectivas de futuro se encuentra la integración sobre la base de redes Ethernet al nivel de planta y la utilización de conceptos de tiempo real y filosofía productor-consumidor en la comunicación entre dispositivos de campo.
Las distancias potenciales de bus van de 100 m a 24 Km (con repetidores y fibra óptica). La velocidad de comunicación puede ir de 9600 bps a 12 Mbps. Utiliza mensajes de hasta 244 bytes de datos.
Profibus se ha difundido ampliamente en Europa y también tiene un mercado importante en América y Asia. El conjunto Profibus DP- Profibus PA cubre la
automatización de plantas de proceso discontinuo y proceso continuo cubriendo normas de seguridad intrínseca.
2.4.2 INTERBUS
Protocolo propietario, inicialmente, de la empresa Phoenix Conctact GmbH, aunque posteriormente ha sido abierta su especificación. Normalizado bajo DIN 19258, norma europea EN 50 254. Fue introducido en el año 1984.
Utiliza una topología en anillo y comunicación mediante un registro de desplazamiento en cada nodo. Se pueden enlazar buses periféricos al principal.
Capa física basada en RS-485. Cada dispositivo actúa como repetidor. Así se puede alcanzar una distancia entre nodos de 400 m para 500Kbps y una distancia total de 12 KM. Es posible utilizar también enlaces de fibra óptica.
Capa de transporte basada en una trama única que circula por el anillo (trama de suma)
La información de direccionamiento no se incluye en los mensajes, los datos se hacen circular por la red. Alta eficiencia. Para aplicaciones de pocos nodos y un pequeño conjunto de entradas/salidas por nodo, pocos buses pueden ser tan rápidos y eficientes como INTERBUS.
Físicamente tiene la impresión de seguir una topología en estrella, pero realmente cada nodo tiene un punto de entrada y otro de salida hacia el siguiente nodo.
Es muy sensible a corte completo de comunicación al abrirse el anillo en cualquiera de los nodos. Por otra parte, la estructura en anillo permite una fácil localización de fallos y diagnóstico.
Es muy apropiado para comunicación determinista a alta velocidad, es muy difícil una filosofía de comunicación orientada a eventos.
2.4.3 DeviceNet
Bus basado en CAN. Su capa física y capa de enlace se basan en ISO 11898, y en la especificación de Bosh 2.0. DeviceNet define una de las más sofisticadas capas de aplicaciones industriales sobre bus CAN.
DeviceNet fue desarrollado por Allen-Bradley a mediados de los noventa, posteriormente pasó a ser una especificación abierta soportada en la ODVA (Open DeviceNet Vendor Association), Cualquier fabricante puede asociarse a esta organización y obtener especificaciones, homologar productos, etc.
Es posible la conexión de hasta 64 nodos con velocidades de 125 Kbps a 500 Kbps en distancias de 100 a 500 m.
Utiliza una definición basada en orientación a objetos para modelar los servicios de comunicación y el comportamiento externo de los nodos. Define mensajes y conexiones para funcionamiento maestro-esclavo, interrogación cíclica,
"strobing" o lanzamiento de interrogación general de dispositivos, mensajes espontáneos de cambio de estado, comunicación uno-uno, modelo productor- consumidor, carga y descarga de bloques de datos y ficheros etc.
DeviceNet ha conseguido una significativa cuota de mercado. Existen más de 300 productos homologados y se indica que el número de nodos instalados superaba los 300.000 en 1998, Está soportado por numerosos fabricantes: Allen- Bradley, ABB, Danfoss, Crouzet, Bosh, Control Techniques, Festo, Omron, .etc.
2.4.4 FOUNDATION FIELDBUS
Un bus orientado sobre todo a la interconexión de dispositivos en industrias de proceso continuo. Su desarrollo ha sido apoyado por importantes fabricantes de instrumentación (Fisher-Rosemount, Foxboro,...). En la actualidad existe una asociación de fabricantes que utilizan este bus, que gestiona el esfuerzo normalizador, la Fieldbus Foundation. Normalizado como ISA SP50, IEC-ISO 61158 (ISA es la asociación internacional de fabricantes de dispositivos de instrumentación de proceso).
En su nivel H1 (uno) de la capa física sigue la norma IEC 11158-2 para comunicación a 31,25 Kbps, es por tanto, compatible con Profibús PA, su principal contendiente. Presta especial atención a las versiones que cumplen normas de seguridad intrínseca para industrias de proceso en ambientes combustibles o explosivos. Se soporta sobre par trenzado y es posible la reutilización de los antiguos cableados de instrumentación analógica 4-20 mA.
Se utiliza comunicación síncrona con codificación Manchester Bifase-L.
La capa de aplicación utiliza un protocolo sofisticado, orientado a objetos con múltiples formatos de mensaje. Distingue entre dispositivos con capacidad de arbitración (Link Master) y normales. En cada momento un solo Link master
arbitra el bus, puede ser sustituido por otro en caso de fallo. Utiliza diversos mensajes para gestionar comunicación por paso de testigo, comunicación cliente-servidor, modelo productor-consumidor etc. Existen servicios para configuración, gestión de diccionario de objetos en nodos, acceso a variables, eventos, carga descarga de ficheros y aplicaciones, ejecución de aplicaciones, etc. La codificación de mensajes se define según ASN.1
El nivel H2 (dos) está basado en Ethernet de alta velocidad (100 Mbps) y orientado al nivel de control de la red industrial.
2.4.5 FIP-WorldFIP
Desarrollado en Francia a finales de los ochenta y normalizado por EN 50170, que también cubre Profibus. Sus capas física y de aplicación son análogas a las de Foundation Fieldbus H1 y Profibus PA. La división Norteamérica de WorldFIP se unió a mediados de los noventa a la Fieldbus Foundation en el esfuerzo por la normalización de un bus industrial común.
Utiliza un modelo productor-consumidor con gestión de variables cíclicas, eventos y mensajes genéricos.
2.4.6 LONWORKS
La empresa Echelon, localizada en California, fue fundada en 1988.
Comercializa el bus de campo LonWorks basado en el protocolo LonTalk y soportado sobre el NeuronChip. Alrededor de estas marcas ha construido toda una estructura de productos y servicios, hábilmente comercializados, dirigidos al mercado del control distribuido en domótica, edificios inteligentes, control
industrial etc. Asegura que varios miles de empresas trabajan con LonWorks, que cientos de empresas comercializan productos basados en su bus y que se han instalado millones de nodos.
El protocolo LonTalk cubre todas las capas OSI. El protocolo se soporta en hardware y firmware sobre el NeuronChip. Se trata de un microcontrolador que incluye el controlador de comunicaciones y toda una capa de firmware que, además de implementar el protocolo, ofrece una serie de servicios que permiten el desarrollo de aplicaciones en el lenguaje Neuron C, una variante de ANSI C.
Motorola y Toshiba fabrican el NeuronChip, además Echelon ofrece la posibilidad de abrir la implementación de LonWorks a otros procesadores.
La red Lonworks ofrece una variada selección de medios físicos y topologías de red: par trenzado en bus, anillo y topología libre, fibra óptica, radio, transmisión sobre red eléctrica etc. El soporte más usual es par trenzado a 38 o 78 Kbps. Se ofrece una amplia gama de servicios de red que permiten la construcción de extensas arquitecturas con multitud de nodos, dominios y grupos, típicas de grandes edificios inteligentes.
El método de comparación de medio es acceso CSMA predictivo e incluye servicios de prioridad de mensajes.
Echelon ofrece herramientas de desarrollo, formación, documentación y soporte técnico. Echelon basa su negocio en la comercialización del bus, medios, herramientas y soporte,
2.4.7 SDS
SDS ("Smart Distributed System") es, junto con DeviceNet y CANOpen, uno de los buses de campo basados en CAN más extendidos. Fue desarrollado por el fabricante de sensores industriales Honeywell en 1989.
Se ha utilizado sobre todo en aplicaciones de sistemas de almacenamiento, empaquetado y clasificación automática. Se define una capa física que incluye alimentación de dispositivos en las conexiones. La capa de aplicación define autodiagnóstico de nodos, comunicación por eventos y prioridades de alta velocidad.
2.4.8 CANOpen
Bus de campo basado en CAN. Fue el resultado de un proyecto de investigación financiado por la Comunidad Europea y se está extendiendo de forma importante entre fabricantes de maquinaria e integradores de célula de proceso. Está soportado por la organización CiA (CAN In Automation), organización de fabricantes y usuarios de CAN que también apoya DeviceNet, SDS etc. Al final de este trabajo se describirá con más detalle este bus, como ejemplo de bus de campo normalizado soportado sobre CAN.
2.4.9 MODBUS
En su definición inicial Modbus era una especificación de tramas, mensajes y funciones utilizada para la comunicación con los PLCs Modicon. Modbus puede implementarse sobre cualquier línea de comunicación serie y permite la comunicación por medio de tramas binarias o ASCII con un proceso
interrogación-respuesta simple. Debido a que fue incluido en los PLCs de la prestigiosa firma Modicon en 1979, ha resultado un estándar de facto para el enlace serie entre dispositivos industriales.
Modbus Plus define un completo bus de campo basado en técnica de paso de testigo. Se utiliza como soporte físico el par-trenzado o fibra óptica.
En la actualidad Modbus es soportado por el grupo de automatización Schneider (Telemechanique, Modicon,...).
2.4.10 INDUSTRIAL ETHERNET
La norma IEEE 802.3 basada en la red Ethernet de Xerox se ha convertido en el método más extendido para interconexión de computadores personales en redes de proceso de datos. En la actualidad se vive una auténtica revolución en cuanto a su desplazamiento hacia las redes industriales. Es indudable esa penetración.
Diversos buses de campo establecidos como Profibus, Modbus etc. han adoptado Ethernet como la red apropiada para los niveles superiores. En todo caso se buscan soluciones a los principales inconvenientes de Ethernet como soporte para comunicaciones industriales:
• El intrínseco indeterminismo de Ethernet se aborda por medio de topologías basadas en conmutadores. En todo caso esas opciones no son gratuitas.
• Se han de aplicar normas especiales para conectores, blindajes, rangos de temperatura etc. La tarjeta adaptadora Ethernet empieza a encarecerse cuando se la dota de robustez para un entorno industrial
Parece difícil que Ethernet tenga futuro a nivel de sensor, aunque puede aplicarse en nodos que engloban conexiones múltiples de entrada-salida.
Como conclusión Ethernet está ocupando un área importante entre las opciones para redes industriales, pero parece aventurado afirmar, como se ha llegado a hacer, que pueda llegar a penetrar en los niveles bajos de la pirámide CIM.
2.4.11 ASI
AS-I (Actuator Sensor Interface) es un bus de campo desarrollado inicialmente por Siemens, para la interconexión de actuadores y sensores binarios.
Actualmente está recogido por el estándar IEC TG 17B.
A nivel físico, la red puede adoptar cualquier tipo de topología: estructura en bus, en árbol, en estrella o en anillo. Permite la interconexión de un máximo de 31 esclavos. La longitud máxima de cada segmento es de 100 metros. Dispone de repetidores que permiten la unión de hasta tres segmentos, y de puentes hacia redes Profibus. Como medio físico de transmisión, emplea un único cable que permite tanto la transmisión de datos como la alimentación de los dispositivos conectados a la red. Su diseño evita errores de polaridad al conectar nuevos dispositivos a la red. La incorporación o eliminación de elementos de la red no requiere la modificación del cable.
El cable consta de dos hilos sin apantallamiento. Para lograr inmunidad al ruido, la transmisión se hace basándose en una codificación Manchester
Cada esclavo dispone de hasta 4 entradas/salidas, lo que hace que la red pueda controlar hasta 124 E/S digitales. La comunicación sigue un esquema maestro -
esclavo, en la cual el maestro interroga a las estaciones enviándoles mensajes (llamados telegramas) de 14 bits y el esclavo responde con un mensaje de 7 bits.
La duración de cada ciclo pregunta respuesta es de 150 s. En cada ciclo de comunicación se deben consultar todos los esclavos, añadiendo dos ciclos extras para operaciones de administración del bus (detección de fallos). El resultado es un tiempo de ciclo máximo de-5ms.
2.4.12 BITBUS
Introducido por Intel a principios de los 80. Es un bus maestro-esclavo soportado sobre RS485 y normalizado en IEEE- 1118. Debido a su sencillez ha sido adoptado en redes de pequeños fabricantes o integradores. En su capa de aplicación se contempla la gestión de tareas distribuidas, es decir es, en cierto modo, un sistema multitarea distribuido. Existe una organización europea de soporte (Bitbus European User's Group).
2.4.13 ARCNet
Originalmente desarrollada como red para proceso de datos en los años „70 ARCNet ha encontrado aplicación en el mundo industrial. Su técnica de paso de testigo hace que sea predecible, determinista y robusta. Está normalizada como ANSI/ATA 878. 1. La velocidad de comunicación es de 2,5 Mbps con paquetes del 0 a 512 bytes. Soporta topología en bus y estrella y diversos medios físicos (cable coaxial, par trenzado, fibra óptica).
Es una red muy apropiada para un nivel intermedio en la jerarquía CIM.
Algunos fabricantes proponen como jerarquía ideal para control industrial una
basada en Ethernet en el nivel superior, ArcNET en el intermedio y CAN al nivel de celda de fabricación.
2.4.14 CONTROLNET
Bus de alta velocidad (5 Mbps) y distancia (hasta 5 Km), muy seguro y robusto promovido por Allen-Bradley. Utiliza cable RG6/U (utilizado en televisión por cable) y se basa en un controlador ASIC de Rockwell.
No es soportado por muchos fabricantes y resulta de elevado precio por nodo.
Se ha utilizado para interconexión de redes de PLCs y computadores industriales en aplicaciones de alta velocidad y ambientes muy críticos.
2.4.15 HART
Es un protocolo para bus de campo soportado por la HART Communication Foundation y la Fieldbus Foundation, Su campo de aplicación básico es la comunicación digital sobre las líneas analógicas clásicas de los sistemas de instrumentación, manteniendo éstas en servicio. Sus prestaciones como bus de campo son reducidas.
Utiliza el bus analógico estándar 4-20 mA sobre el que transmite una señal digital modulada en frecuencia (modulación FSK 1200-2200 Hz). Transmite a 1200 bps manteniendo compatibilidad con la aplicación analógica inicial y sobre distancias de hasta 3 km. Normalmente funciona en modo maestro-esclavo.
CAPITULO III
COMUNICACIÓN VÍA BUS 3.1 INTRODUCCIÓN
En la actualidad es de mucha necesidad la utilización de sistemas de automatización y de supervisión de procesos industriales, debido a sus bondades de una mejor gestión de las instalaciones eléctricas y tecnológicas, por ello ha llevado a los constructores de interruptores automáticos a implementar en los relés de protección electrónicos interfaces para el diálogo y la comunicación vía bus con aparatos de control como PC, PLC o SCADA.
De esta forma, además de para la protección y la maniobra, los interruptores automáticos se utilizan para la supervisión y el control de las instalaciones eléctricas de distribución.
A continuación he tratado los temas que tienen por objeto acercar al lector los conceptos básicos de: redes y protocolos de comunicación y, diálogo entre dispositivos electrónicos "inteligentes", así también describir las funciones de los relés de protección electrónicos que permiten a los interruptores automáticos la comunicación vía bus.
3.2 COMUNICACIÓN DIGITAL
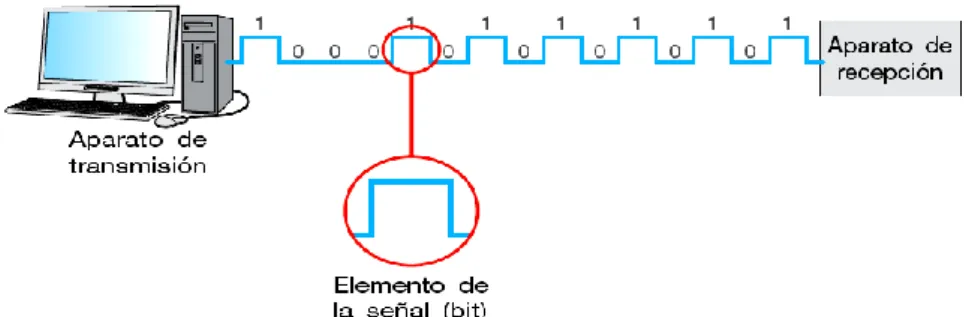
La comunicación digital es un intercambio de datos (en formato binario, representado mediante bits1) entre dispositivos electrónicos "inteligentes" dotados de sus correspondientes circuitos e interfaces.
Generalmente, la comunicación se produce de forma serial, es decir, los bits que constituyen un mensaje o un paquete de datos se transmiten uno detrás de otro a través del mismo canal de transmisión (medio físico).
Los aparatos que deben intercambiarse los datos y la información se encuentran interconectados por medio de una red de comunicación.
Por lo general, una red está compuesta por nodos interconectados con líneas de comunicación:
- el nodo (un dispositivo "inteligente" capaz de dialogar con otros dispositivos) constituye el punto de transmisión y/o recepción de los datos;
- la línea de comunicación es el elemento de conexión de dos nodos, el recorrido directo que la información sigue para ser transferida entre ambos nodos; dicho de otra forma, es el medio físico (cable coaxial, par trenzado, fibras ópticas, rayos infrarrojos) por el que viajan la información y los datos.
Figura 1: Secuencia de bits
Las principales redes de comunicación pueden clasificarse en las siguientes tipologías:
1. Red en anillo
Las redes en anillo están constituidas por una serie de nodos (en la Figura 2 representados por PC) interconectados formando un anillo cerrado.
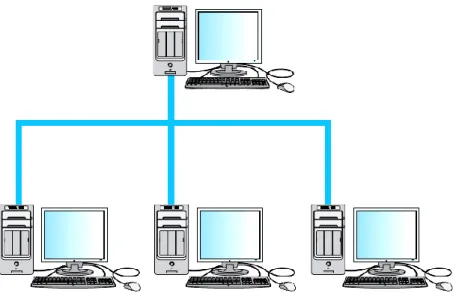
Figura 2: Red en anillo 2. Red en estrella
Las redes en estrella están basadas en un nodo central al que se conectan todos los demás nodos periféricos.
Figura 3: Red en estrella
3. Red tipo bus
La red tipo bus se basa en un medio de transmisión (generalmente, un cable en espiral o un cable coaxial) en común para todos los nodos conectados, por tanto, en paralelo.
Figura 4: Red tipo bus
Algunos ejemplos de gestión de procesos en los que se requiere el diálogo entre los dispositivos que forman parte de una red de comunicación son:
1. El intercambio de datos entre los PC de una sociedad o empresa conectados entre sí por medio de una red LAN.
2. La emisión y recepción de datos y comandos entre un sistema de supervisión y control y los dispositivos de campo (sensores y actuadores) de un sistema de automatización para la gestión de un proceso industrial.
Figura 5: Ejemplo de red LAN
Figura 6: Ejemplo de un sistema de supervisión para la gestión de un proceso industrial
Para gestionar el tráfico de datos de una red y para que dos dispositivos que dialogan sean capaces de entenderse recíprocamente es necesario un protocolo de comunicación. El protocolo de comunicación es el sistema de normas y
comportamientos que dos entidades deben respetar para intercambiar información, una convención precisa asociada a los datos intercambiados entre las partes.
Los protocolos utilizados para la comunicación de los diferentes dispositivos empleados en las aplicaciones industriales son muy numerosos y varían en función de las exigencias de comunicación de cada aplicación, que pueden ser:
• Cantidad de datos que se van a transmitir;
• Número de dispositivos implicados;
• Características del entorno en el que va a producirse la comunicación;
• Vínculos de tiempo;
• Criticidad o no de los datos que se van a enviar;
• Posibilidad o no de corregir errores de transmisión;
y muchas otras.
Por otro lado, existe una amplia variedad de protocolos utilizada en la comunicación entre aparatos informáticos, como los ordenadores y sus respectivos periféricos.
A continuación abordaremos este tema, pero nos limitaremos a describir los protocolos utilizados en la comunicación industrial entre dispositivos de campo, es decir, aquellos dispositivos que interaccionan directamente con el proceso físico que se quiere mantener bajo control.
Particularmente, los conceptos aplicados a la gestión de las instalaciones eléctricas de distribución de energía de baja tensión son los de comunicación, supervisión y control.
3.2.1 Los protocolos de comunicación
Los protocolos utilizados actualmente en las comunicaciones industriales son muy complejos.
Para simplificar, se suelen describir separadamenmte los niveles de funcionamiento; en cada protocolo, se distingue un nivel físico “physical layer”, un nivel de transmisión de datos ("data link") y un nivel de aplicación ("application layer"). Cada uno de estos niveles describe un aspecto del funcionamiento de la comunicación, a saber:
- el nivel físico determina la conexión entre los diversos dispositivos desde el punto de vista de hardware, describiendo las señales eléctricas utilizadas para transmitir los bits de uno a otro; describe, por ejemplo, las conexiones eléctricas y los métodos de cableado, las tensiones y las corrientes utilizadas para representar los bits 1 y 0 y sus duraciones.
En los protocolos industriales, el nivel físico es generalmente una de las interfaces estándar tipo RS-232, RS-485, RS-422, etc.;
• El nivel de transmisión de datos describe cómo los bits se agrupan en caracteres y éstos en paquetes y cómo los posibles errores son detectados y corregidos.
Cuando es necesario, también define los turnos y las prioridades que los dispositivos deben respetar para acceder al medio de transmisión;
• El nivel de aplicación indica cuáles son los datos transmitidos y cual es su significado en relación con el proceso bajo control. En este nivel, se
especifica que datos deben contenerse en los paquetes transmitidos y recibidos y cómo son utilizados.
En término generales, estos niveles son independientes unos de otros. Si extrapolamos el concepto de los niveles a la comunicación entre personas, podría decirse que hablar por teléfono o por emisor-receptor de radio equivaldría al nivel físico, hacerlo en inglés o en francés sería el nivel de transmisión de datos y el tema de la conversación correspondería al nivel de aplicación.
Para llevar a cabo con éxito la comunicación entre dos entidades, todos los niveles considerados deberán corresponderse; por ejemplo, si usamos el teléfono, no podremos hablar con quien está usando una radio, no podremos entendernos utilizando diferentes lenguas, etc.
Figura 7: Imposibilidad de comunicación entre radio y teléfono.
Sin pretender realizar una descripción completa de los protocolos existentes, señalamos algunas de las características de los sistemas de comunicación a través de una breve descripción de los tres niveles anteriormente citados.
3.2.1.1 El nivel físico
En este nivel físico, tenemos:
• sistemas Wireless (sin cables) que utilizan como medio físico ondas de radio, rayos infrarrojos o señales luminosas que se propagan libremente por el espacio;
• sistemas Wired, o cableados, en los que las señales se transmiten por cables (o en su caso fibras ópticas).
Entre estos últimos hay:
• sistemas con cableado punto a punto ("point to point"), en los que cada tramo de cable conecta dos dispositivos y sirve exclusivamente para la comunicación entre ellos (como clásico ejemplo, la comunicación entre un PC y una impresora).
Esta comunicación puede ser de tipo "full duplex", si ambos dispositivos pueden transmitir al mismo tiempo, o "half duplex", si pueden hacerlo sólo alternándose;
• sistemas con cableado multipunto (también llamado "multidrop"), en los que muchos dispositivos comparten en paralelo el mismo cable de comunicación (Figura 8).
Entre los sistemas multipunto destacan los de conexión de tipo bus, en los que un cable principal sin o con ramificaciones conecta en paralelo entre sí todos los dispositivos.
Figura 8: Sistema multipunto con conexión de tipo bus
En las redes industriales, las interfaces de nivel físico más utilizadas son la RS-232 para conexiones punto a punto y la RS-485 para conexiones multipunto.
Las interfaces RS-232 y RS-485 En el nivel físico, tenemos:
La interfaz RS-232, muy utilizada con los PC, también conocida como puerto serie, es un sistema de comunicación serie de puerto asíncrono punto a punto que puede funcionar en "full duplex".
Figura 9: Conector serie RS-232 de 9 pines
Figura 10: Cable serie RS-232 de 9 pines
Figura 11: Conexión punto a punto entre dos PC Dichas características pueden describirse de la siguiente manera:
• Serie significa que los bits se transmiten uno tras otro;
• Asíncrono significa que cada dispositivo puede transmitir un carácter cada vez, separados por intervalos de tiempo largos o cortos según las necesidades;
• Punto a punto significa que solo dos dispositivos pueden estar conectados entre sí siguiendo esta modalidad. Si se quiere utilizar la rs-232 para conectar más de dos dispositivos, cada pareja debe contar con un canal independiente y con dos puertos dedicados;
• “Full dúplex” significa que los dispositivos pueden transmitir y recibir al mismo tiempo. El funcionamiento en "full duplex" es posible gracias a que existen dos conexiones eléctricas separadas para las dos direcciones en las que los datos viajan.
Los bits se transmiten en forma de niveles de tensión desde el terminal de transmisión (Tx) de un dispositivo al terminal de recepción (Rx) del otro dispositivo. Las tensiones son referidas a un conductor de tierra de señal (GND) conectado al homónimo terminal de los dos dispositivos.
Figura 12: Conexiones básicas para la comunicación entre dos dispositivos con la interfaz RS-232.
Para la conexión se necesitan al menos tres líneas (Tx, Rx y GND): pueden utilizarse más conexiones para regular el flujo de datos (por ejemplo, indicar cuando un dispositivo está listo para transmitir o recibir); estas operaciones, que constituyen los procesos de “handshaking” y “flow control".
Cada uno de los caracteres que transita por el cable serie está constituido por:
• Uno o más bits de inicio, que sirven para informar al dispositivo receptor de la llegada de un nuevo carácter (el dispositivo receptor de una interfaz asíncrona no sabe cuándo se presenta un carácter, por tanto hay que indicárselo con anterioridad);
• Cierto número de bits de datos (ejemplo 8);
• Un eventual bit de paridad, que sirve para reconocer si entre los bits transmitidos existe alguno erróneo (en ese caso, el carácter al completo es
considerado no válido y se descarta): el bit de paridad, si se utiliza, puede ser configurado en modalidad par o impar.
• Uno o más bits de parada, que concluyen la transmisión.
Todos los bits descritos tienen la misma duración: la inter-faz serie está configurada para transmitir un cierto número de bits por segundo (bps o baudios). Las velocidades de transmisión están estandarizadas, de manera que suelen usarse múltiplos de 300 bits por segundo. Por ejemplo, un dispositivo puede transmitir a 9600, 19200 o 38400 baudios o bits por segundo.
Para una óptima comunicación, es indispensable que los dos dispositivos utilicen los mismos ajustes: "baud rate" (velocidad de transmisión), número de bits de datos, de inicio y de parada, el uso o no del bit de paridad y, en caso afirmativo, la modalidad (par o impar)
Si esto no se produce, ningún carácter será reconocido correctamente y, por consiguiente, será imposible transmitir datos.
Por ejemplo, en la cadena de bits representada en la Figura 13, pueden distinguirse:
• Un bit de inicio;
• 8 bits (b0….b7) que componen el dato;
• Un bit de parada.
Figura 13: Dato transmitido en 8 bit
La interfaz RS-485 se distingue de la RS-232 por sus propiedades eléctricas y de conexión.
Sus ventajas principales son: la posibilidad de realizar conexiones multipunto4, es decir, entre más de dos dispositivos (véase Figura 14), y una mayor inmunidad a las perturbaciones eléctricas.
Figura 14: Sistema multipunto con conexión por bus con RS-485
Estas características la convierten en la interfaz más utilizada en el medio industrial, desde las primeras versiones de Modbus (años sesenta) a los más modernos Modbus RTU, Profibus-DP, DeviceNet, CANopen y As-interface.
En la RS485, todos los dispositivos están conectados en paralelo a un único bus formado por dos conductores, denominados: Data+ y Data-, o también A y B o Data1 y Data2, según los diferentes fabricantes de los dispositivos.
Las señales utilizadas son diferenciales; esto quiere decir que los bits están representados por la diferencia de potencial entre Data+ y Data-. Los conductores se encuentran entrelazados y próximos el uno al otro, para que así las perturbaciones eléctricas les afecten con la misma intensidad, de manera que la diferencia de tensión se altere lo menos posible.
Cuando un dispositivo no está transmitiendo, se pone "en recepción", presentando una impedancia elevada en el puerto de comunicación.
Las especificaciones estándar RS-485 (EIA/TIA-485) imponen límites a la impedancia de entrada y ponen requisitos a la corriente/potencia que cada dispositivo debe poder transferir a través de la línea durante la transmisión.
Concretamente, de acuerdo con lo establecido en el estándar de referencia, para una correcta transmisión de datos no debe haber más de 31 dispositivos
"en recepción" conectados a la línea.
Por lo tanto, según lo establecido en la norma, la RS-485 garantiza una correcta comunicación con un número máximo de dispositivos conectados al bus de 32, habiendo en cada ciclo de comunicación un dispositivo "en transmisión" y los otros 31 "en recepción".
De hecho, puesto que todos los dispositivos están conectados en paralelo a un único bus, sólo puede transmitir uno a la vez, ya que de lo contrario las señales se superponen y se vuelven irreconocibles.
La interfaz RS-485 no incorpora ningún mecanismo para definir que dispositivo tiene permiso para transmitir esta tarea compete a los niveles superiores del protocolo utilizado.
La estructura de cada carácter transmitido, su duración y las posibilidades de configuración de la transmisión son las mismas que las anteriormente vistas para el puerto serie RS-232; se puede tener una transmisión programada a una
velocidad de 19200 baudios, con 1 bit de inicio, 1 bit de parada y 1 bit de paridad usado, por ejemplo, en modalidad Par.
Todos los dispositivos conectados a un mismo bus deben estar programados de la misma manera para poder comunicarse entre sí.
3.2.1.2 Nivel de transmisión de datos
En este nivel de transmisión de datos, se habla de protocolo maestro-esclavo ("master-slave") cuando uno de los dispositivos (el maestro) tiene la función de controlar y gestionar la comunicación de todos los demás (esclavos). Sin embargo, se habla de sistemas entre iguales ("peer-to-peer") cuando no existe tal jerarquía y los dispositivos acceden al medio de comunicación de igual manera (en este caso, el protocolo incluye los procedimientos para gestionar los turnos y las prioridades de acceso al medio de comunicación; es el ejemplo de Ethernet).
Entre los protocolos de comunicación más utilizados se encuentran:
• Modbus RTU, el protocolo de conexión más usado en los dispositivos electrónicos industriales;
• ProfiBus-DP, usado para comunicación de campo con sensores y actuadores inteligentes, generalmente, con intercambio de datos veloz y cíclico entre aparatos de campo y controladores;
• DeviceNet, también usado para la interfaz entre dispositivos de campo y controladores (PC, PLC);
• AS-i, para la comunicación con sensores muy sencillos, como los interruptores de fin de carrera, o dispositivos de mando (pulsadores).
3.2.1.3 Nivel de aplicación
El nivel de aplicación da un significado a los datos transmitidos; dicho de otro modo, asocia un comando (por ejemplo, abre/cierra el interruptor) o un número (por ejemplo, valores de tensión) a los datos en formato binario que los dispositivos se intercambian por medio de las redes de comunicación.
Pongamos como ejemplo el uso del protocolo Modbus para leer a distancia los valores de corriente almacenados en un interruptor Tmax con relé de protección PR222DS/PD.
Cada relé de protección almacena los valores de las magnitudes y de los parámetros en registros; estos registros pueden ser de sólo lectura (como el registro de medida de las corrientes) o de lectura y escritura (como el registro para la programación de las curvas y los umbrales de intervención de las protecciones)6.
En el relé de protección PR222DS/PD, las corrientes son almacenadas en los registros a partir de 30101.
Nº de registro Contenido del registro Significado del contenido
30101 198 IL1 Corriente en la fase 1 [A]
30102 298 IL2 Corriente en la fase 2 [A]
30103 447 IL3 Corriente en la fase 3 [A]
30104 220 ILN Corriente en el neutro [A]
Cuando el maestro (por ejemplo, un PC) quiere leer los valores de las corrientes, envía al interruptor un mensaje que contiene:
• El número de los registros que almacenan los datos (el número de registro lleva asociadas las magnitudes medidas; en el ejemplo se indican los registros de 30101 a 30104 que contienen los valores de las corrientes;
• El tipo de operación (por ejemplo, lectura de los valores contenidos en el registro).
El esclavo (en este caso el interruptor) responde enviando al maestro los valores requeridos.
Después, dichos valores son mostrados al operador en un formato comprensible a través de las interfaces de usuario de los programas y las aplicaciones de supervisión, que facilitan la presentación de la información y de los datos procedentes del proceso controlado.
En la Figura 15 se representa la interfaz de usuario del software SDView2000, mediante la cual un operador puede:
• Visualizar los valores de las corrientes y los datos contenidos en el interruptor que protege la sección de una instalación eléctrica;
• Efectuar operaciones de apertura y cierre del interruptor a distancia.
Figura 15: Ejemplo de interfaz de usuario para la supervisión de una instalación eléctrica.
3.2.1.4 Compatibilidad entre niveles
En la comunicación industrial, los diferentes dispositivos que se intercambian información deben utilizar los mismos protocolos en todos los niveles involucrados.
Por ejemplo, como veremos en los capítulos sucesivos, los interruptores ABB utilizan el protocolo Modbus RTU con RS-485. Sin embargo, existen dispositivos industriales que utilizan Modbus RTU con RS-485.
A continuación, se muestran algunas de las combinaciones citadas anteriormente, indicándose cuáles funcionan y cuáles no.
NIVELES DEL PROTOCOLO
PROTOCOLO DEL DISPOSITIVO A
PROTOCOLO DEL
DISPOSITIVO B COMUNICACIÓN/DIÁLOGO
Nivel lógico Modbus Modbus Si Comunicación
Compatibilidad en todos los niveles del protocolo
Nivel físico RS-485 RS-485
Nivel lógico Modbus Modbus Si Comunicación
Compatibilidad en todos los niveles del protocolo
Nivel físico RS-232 RS-232
Nivel lógico Profibus-DP Profibus-DP Si Comunicación
Compatibilidad en todos los niveles del protocolo
Nivel físico RS-485 RS-485
Nivel lógico Profibus-DP Modbus No Comunicación
Incompatibilidad en el nivel lógico del protocolo
Nivel físico RS-485 RS-485
Nivel lógico Modbus Modbus No Comunicación
Compatibilidad en el nivel físico del protocolo
Nivel físico RS-485 RS-232
Nivel lógico Profibus-DP Profibus-DP No Comunicación
Compatibilidad en todos los niveles del protocolo
Nivel físico RS-485 RS-232
El nivel lógico es la combinación de nivel de transmisión de datos + nivel de aplicación.
3.3 SUPERVISIÓN DE LAS INSTALACIONES ELÉCTRICAS DE DISTRIBUCIÓN
Una instalación eléctrica de distribución de BT puede considerarse como un proceso industrial dirigido a la distribución de energía eléctrica y, en este sentido, también necesita un sistema de supervisión y control para aumentar la fiabilidad y optimizar las gestiones.
Desde el punto de vista de la integración entre la técnica industrial tradicional y los sistemas de control, para poder gestionar, controlar y realizar un seguimiento de forma centralizada y automática de las instalaciones civiles e industriales, puede decirse que en la instalación eléctrica deben intervenir dos flujos:
• Un flujo principal (flujo de energía) constituido por la potencia y la energía que, a través de conductores de línea y aparatos de mando y de protección, llega a las cargas de una instalación;
• Un flujo de información o flujo informativo (flujo digital) constituido por toda la información, los datos y los mandos útiles para el control y la gestión de la instalación.
Figura 16: Representación del flujo principal y del flujo informativo
El sistema de supervisión es el encargado de gestionar este flujo informático que transmita por la red de comunicación.
Flujo informativo
En función de la extensión y la complejidad de las instalaciones que se pretenden gestionar, se pueden realizar sistemas de supervisión con diferentes estructuras, desde las más sencillas (estructuras de dos niveles) a las más complejas (estructuras multinivel).
Para simplificar la exposición, en este documento se considera que los sistemas con estructura de dos nivelesson adecuados para la gestión de pequeñas y medianas instalaciones de distribución de media y baja tensión.
En este tipo de estructura se distinguen:
1. El nivel de control: constituido por el sistema de supervisión, control y adquisición de datos (SCADA: Supervisory Control and Data Acquisition).
En las aplicaciones más simples, este nivel requiere un ordenador en el que se encuentren instalados los correspondientes programas de adquisición de datos, control o supervisión de la instalación.
En este nivel se adquieren, visualizan y procesan los datos transmitidos desde los sensores y se envían los comandos a los actuadores.
De este modo, un operador puede, desde un único puesto, realizar un seguimiento del estado de toda la instalación y emprender las operaciones oportunas para garantizar el rendimiento y el correcto funcionamiento.
Más concretamente, en las aplicaciones en las que se integran la gestión de la instalación eléctrica y la gestión del proceso, el nivel de control está constituido por el ordenador supervisor del sistema de automatización de todo el proceso industrial.
2. El nivel de campo: compuesto por dispositivos de campo dotados de interfaz de comunicación (sensores, actuadores e interruptores de protección equipados con sus correspondientes relés de protección electrónicos) montados en la instalación eléctrica que interaccionan con esta última y la ponen en relación con el nivel de control.
Las principales funciones del nivel de campo son:
1) Enviar los datos de la instalación (corrientes, tensiones, energías, estado de los interruptores, etc.) Al nivel de control;
2) Ejecutar los comandos (por ejemplo, apertura/cierre de los interruptores) recibidos desde el nivel de control.
Ambos niveles se comunican por medio de una red de comunicación tipo bus.
Figura 17: Sistema de supervisión con estructura de dos niveles.
La información (por ejemplo, valores medidos) transmitida desde el nivel de campo al nivel de control y los comandos, que viajan en dirección opuesta, constituyen el flujo informativo que transita por el bus.
3.3.1 La supervisión con los interruptores automáticos
En el ámbito de la distribución de energía, la comunicación y el diálogo entre los dispositivos de protección son posibles gracias a los relés de protección electrónicos dotados de interfaz para comunicación Modbus.
El uso de estas unidades permite que los interruptores automáticos ABB puedan:
• Intercambiar datos con otros aparatos eléctricos por medio de un bus de comunicación e interactuar con sistemas de supervisión y control para la supervisión de las instalaciones eléctricas de baja tensión;
• Integrar la gestión de la instalación eléctrica de distribución con los sistemas de automatización y gestión de toda una planta o proceso industrial; por ejemplo, integrar la información (corrientes, tensiones y potencias) procedente de los interruptores que protegen los motores, los circuitos auxiliares y la línea de alimentación de los hornos eléctricos de una acería con la información y los datos de las magnitudes físicas (como la presión y la temperatura) involucradas en la gestión de todo el proceso.
De esta forma, el interruptor automático dotado de interfaz Modbus, además de desarrollar la clásica función de proteger la instalación de las sobrecorrientes y proporcionar energía a las cargas, desempeña el papel de dispositivo de campo