Transformada de
Transformada de Laplace
[ ]
Laplace
de
compleja
le
variab
j
s
dt
e
)
t
(
f
)
s
(
F
)
t
(
f
0
st
ω
+
σ
=
=
=
∫
∞
−
L
f(t) función temporal
f(t) = 0 para t < 0
t
f(t)
[ ] [ ]
)
s
(
G
)
s
(
F
)
t
(
g
)
t
(
f
)
t
(
g
f(t)
si
=
=
=
L
L
Cambio de
Transformada de Laplace
Si la ecuación algebraica se resuelve en
s
, se puede
encontrar la solución de la ecuación diferencial
(Transformada inversa de Laplace) utilizando una tabla de
transformadas, o bien mediante la técnica de expansión en
fracciones parciales.
•La Transformada de Laplace es un método operacional que
puede utilizarse para resolver ecuaciones diferenciales lineales.
Transformada de Laplace
[ ] [ ]
)
s
(
G
)
s
(
F
)
t
(
g
)
t
(
f
)
t
(
g
f(t)
si
=
=
=
L
L
Cambio de
variable t
⇒
s
Resolución del problema en el dominio s X(s)
Interpretación y expresión de la solución en el
dominio t
Cambio de
variable s
⇒
t
[
]
∫
∞∞ −
−
=
=
j
j
st
1
X
(
s
)
X
(
s
)
e
ds
)
t
(
Transformada de Laplace
Dominio temporal
Dominio de Laplace
Tomar
£
(TABLA)
Tomar
£
-1(TABLA)
PASO 4 PASO 1
Factorizar D(s)
Descomponer en
fracciones simples
PASO 3
Resolver
Y(s)=N(s) / D(s)
PASO 2
Solución
y (t)
Propiedades de la T. Laplace (I)
[
]
s
)
(
f
s
)
s
(
F
dt
)
t
(
f
dt
)
(
df
)
(
sf
)
s
(
F
s
dt
)
t
(
f
d
)
(
f
)
s
(
sF
dt
)
t
(
df
)
s
(
bG
)
s
(
aF
)
t
(
bg
)
t
(
af
)
(
t
−
+
−
=
−
−
=
−
=
+
=
+
∫
0
0
0
0
1
0
2
2
2
L
L
L
L
•
Linealidad
•
Diferenciación en el dominio del tiempo
[ ]
=
=
∞∫
−0
st
dt
e
)
t
(
f
)
s
(
F
)
t
(
f
L
Propiedades de la T. Laplace (II)
)
s
(
sF
lim
)
t
(
f
lim
0
s
t→
∞
=
→[
f
(
t
-
d
)
]
=
e
-sdF
(
s
)
L
•
Desplazamiento en el tiempo
•
Teorema del valor final
•
Teorema de convolución
NOTA
: Este teorema sólo es válido si “s F(s)” no tiene
polos sobre el eje imaginario o con parte real positiva.
Es válido solamente si, existe
lim
f t
t→∞
( )
•
Teorema del valor inicial
sF(s)
lim
f(t)
lim
s 0
t→
=
→∞)
s
(
G
)
s
(
F
d
)
t
(
g
)
(
f
0=
∞∫
t
-
τ
τ
Propiedades de la T. Laplace (III)
•
Transformación de variables. Cambio de escala
•
Traslación en el campo complejo
(
)
[
f
t/
]
F(
s)
L
α
=
α
α
( )
[
]
(
α
)
α
α
t
1
F
s/
f
L
=
α
:
Constante positiva
[ ]
f
(t)
F(s)
L
1=
y
L
[
f
2(t)
]
=
F(s
±
α
)
(t)
f
e
(t)
f
t 12
=
mα:
α
Constante
•
Diferenciación en el campo complejo
[
]
ds
dF(s)
tf(t)
Propiedades I
[
]
[
af
(
t
)
bg
(
t
)
] [
af
(
t
)
bg
(
t
)
]
e
dt
a
f
(
t
)
e
dt
b
g
(
t
)
e
dt
aF
(
s
)
bG
(
s
)
)
s
(
bG
)
s
(
aF
)
t
(
bg
)
t
(
af
0 st 0 st 0st
=
+
=
+
+
=
+
+
=
+
∫
∫
∫
∞ − ∞ − ∞ −L
L
Transformada de Laplace de
funciones básicas (I)
[ ]
s
k
s
e
k
dt
ke
dt
e
)
t
(
f
)
s
(
F
)
t
(
f
0 st
0
st
0
st
=
=
−
=
=
=
∞ − ∞
− ∞
−
∫
∫
L
f(t)
función escalón
f(t) = 0 para t < 0
f(t) = k para t >= 0
t
f(t)=k
f(t)
función rampa
f(t) = 0 para t < 0
f(t) = kt para t >= 0
t
f(t)=kt
2
0
s
K
dt
e
.
Kt
)
s
(
F
=
∫
st=
∞
t
∫
∫
∞ ∞
+ α − −
α −
α
+
=
=
=
0 0
t ) s ( st
t
s
K
dt
e
K
dt
e
.
e
.
K
)
s
(
F
f(t)
función exponencial
f(t) = 0 para t < 0
f(t) = ke
-αtpara t
≥
0
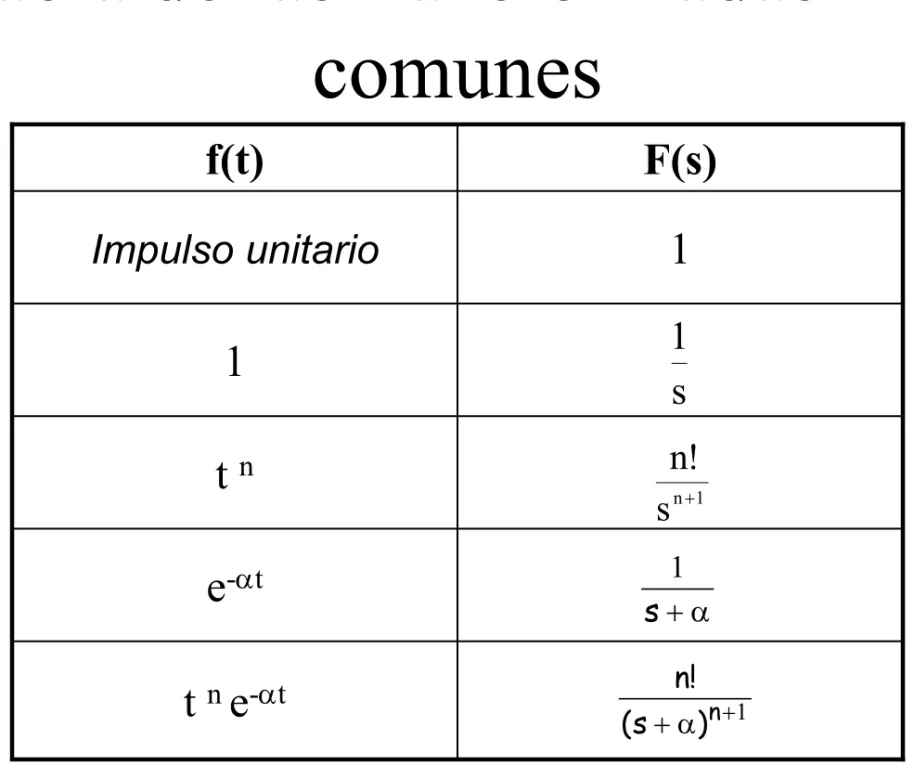
Tablas de transformadas de las
funciones mas comunes
Tabla de las transformadas más
comunes
t
n
e
-
α
t
e
-
α
t
t
n
1
1
Impulso unitario
F(s)
f(t)
s
1
1 n
s
!
n
+
α
+
s
1
1
+
α
+
)
ns
(
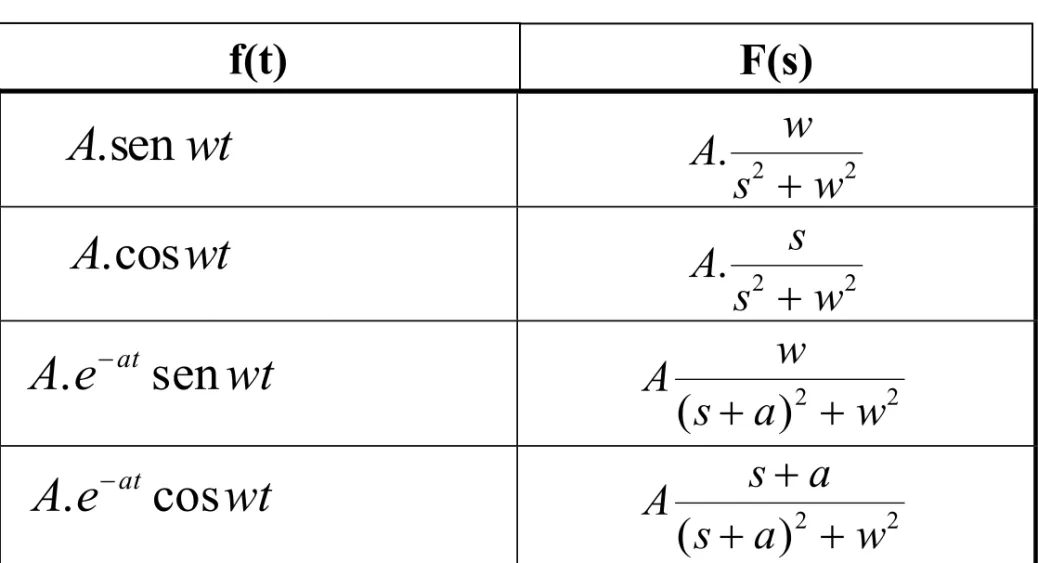
Tabla de las transformadas más
comunes
wt
A
.
sen
A
w
s
w
.
2 2+
A
.cos
wt
A
s
s
w
.
2 2+
A e
.
−atsen
wt
A
w
s a
w
(
+
)
2+
2A e
.
−atcos
wt
A
s a
s a
w
+
+
+
(
)
2 2Método de reducción en
fracciones parciales
F s
N s
D s
N s
s p s p s p
s p
n( )
( )
( )
( )
(
)(
)(
)...(
)
=
=
+
1+
2+
3+
En los sistemas de control cuyo comportamiento se rige por una
ecuación diferencial de coeficientes constantes, la función F(s) tiene
normalmente la forma:
s
p
s
p
s
p
n= −
= −
= −
1
2
...
son las raíces del polinomio D(s)
donde:
Método de reducción en
fracciones parciales
•
RAICES REALES SIMPLES:
-
La función F(s) se podrá descomponer en la siguiente forma:
-
Aplicando la propiedad de linealidad de la transformada de
Laplace
∑
∏
==
+
=
+
+
+
+
+
+
=
+
=
=
n1
i i
i
n n
2 2
1 1 n
1 i
i
p
s
A
p
s
A
...
p
s
A
p
s
A
)
p
(s
N(s)
D(s)
N(s)
F(s)
[
]
+
+
+
+
+
+
=
=
n n
p
s
A
p
s
A
p
s
A
s
F
t
f
-12 2 1
-1 1 1
-1
-
(
)
£
£
....
£
Método de reducción en
fracciones parciales
•
RAICES REALES SIMPLES:
-
Por lo tanto la antitrasformada de Laplace es:
- La manera de calcular el valor de cada residuo A
ies la
siguiente:
i
p
s
i
i
s
p
F
s
A
=
(
+
)
(
)
=
−
∑
=
−
=
n
i
t
p
i
e
iA
t
f
1
.
)
(
i
p
-
polo
del
residuo
polo
⇒
⇒
−
i i
Método de reducción en
fracciones parciales
•
EJEMPLO 1:
Hallar la antitrasformada de Laplace de:
SOLUCION
La función F(s) la podemos poner en la forma:
A continuación calculamos los valores de A
iPor tanto la transformada inversa de Laplace es:
(
)(
)
(
2
)(
5
)(
6
)
4
3
)
(
+
+
+
+
+
=
s
s
s
s
s
s
s
F
(
)(
)
(
2
)(
5
)(
6
)
2
5
6
4
3
)
(
0 1 2 3+
+
+
+
+
+
=
+
+
+
+
+
=
s
A
s
A
s
A
s
A
s
s
s
s
s
s
s
F
4 1 6
s 6) F(s)(s 3
15 2 5 s 5) F(s)(s 2
A
12 1 2
s 2) F(s)(s 1
A 5
1 0 s F(s)s 0
A
− = − = + =
= − = + =
− = − = + =
= = =
A
f t
( )
=
1
−
e
− t+
e
− t−
e
− t5
1
12
2
15
1
4
Método de reducción en
fracciones parciales
•
EJEMPLO 2:
Hallar la antitransformada de Laplace de:
SOLUCION
Vamos a calcular los A
ide otra forma:
Igualando los coeficientes:
Por tanto la solución es:
)
3
(
)
1
(
)
2
(
10
)
(
+
+
+
=
s
s
s
s
F
3
1
)
3
(
)
1
(
)
2
(
10
)
(
1 2+
+
+
=
+
+
+
=
S
A
S
A
s
s
s
s
F
2 1
2 1
2
1
(
s
3
)
A
(
s
1
)
10
s
20
(
A
A
)
s
3
A
A
A
)
2
s
(
10
+
=
+
+
+
→
+
=
+
+
+
5
5
3
20
10
2 1
2 1
2
1
=
=
+
=
+
=
A
A
A
A
A
A
t t
e
e
t
Método de reducción en
fracciones parciales
•
RAICES REALES MÚLTIPLES:
- Los coeficientes A
1...A
nse calculan según lo visto
anteriormente y los a
rde la siguiente manera:
Método de reducción en
fracciones parciales
•
RAICES REALES MÚLTIPLES:
- Teniendo en cuenta que:
- Por lo tanto la Transformada inversa de F(s) será de la forma:
£
-11
1
1
(
s p
)
(
)!
t
r
e
i r
r
p ti
+
=
−
−
−
[
]
f t
F s
A e
A e
A e
a
r
t
a
r
t
a t a
e
p t p t
n
p t
r r r r p t
n
i
( )
( )
.
.
...
.
(
)!
(
)!
...
.
=
=
+
+ +
+
+
−
+
−
+ +
+
− − −
− − − −
£
-11 2
1 1 2
2 1
1 2
Método de reducción en
fracciones parciales
•
EJEMPLO 3:
Hallar la antitransformada de Laplace de:
SOLUCIÓN
Lo ponemos en la forma:
F s
s
s
s
s
( )
(
) (
)(
)
=
+
+
+
+
1
2
24
3
2
)
3
s
)(
s
(
F
A
4
3
)
4
s
)(
s
(
F
A
3
s
A
4
s
A
2
s
a
)
2
s
(
a
)
3
s
)(
4
s
(
)
2
s
(
1
s
)
s
(
F
3 s 2
4 s 1
2 1
1 2
2 2
−
=
+
=
=
+
=
+
+
+
+
+
+
+
=
+
+
+
+
=
− =
Método de reducción en
fracciones parciales
•
EJEMPLO 3:
- Por lo tanto la solución será:
t 2 t
3 t
4
t
e
2
1
4
5
e
2
e
4
3
)
t
(
f
− − −
−
+
−
=
4
5
12
s
7
s
1
s
ds
d
)
2
s
)(
s
(
F
ds
d
a
2
1
)
2
s
)(
s
(
F
a
2 s 2
2 s 2 1
2 s 2 2
=
+
+
+
=
+
=
−
=
+
=
− = −
Método de reducción en
fracciones parciales
•
EJEMPLO 4:
Hallar la antitransformada de Laplace de:
SOLUCIÓN
F s
s
s
s
( )
(
)
=
+
+
+
2
3
2
3
1
2
C
;
0
B
;
1
A
C
B
A
3
B
A
2
2
A
1
C
)
1
s
(
B
)
1
s
2
s
(
A
3
s
2
s
C
)
1
s
(
B
)
1
s
(
A
3
s
2
s
)
1
S
(
C
)
1
S
(
B
1
S
A
)
1
s
(
3
s
2
s
)
s
(
F
2 2
2 2
3 2
3 2
=
=
=
+
+
=
+
=
=
+
+
+
+
+
=
+
+
+
+
+
+
=
+
+
+
+
+
+
+
=
+
Método de reducción en
fracciones parciales
•
EJEMPLO 4:
Por lo tanto la solución queda:
Y finalmente, la función temporal es:
F s
s
s
( )
(
)
=
+
+
+
1
1
2
1
3)
t
1
(
e
)
t
(
f
e
t
e
1
)
t
(
CIPQ Marga Marcos, Itziar Cabanes, Eva Portillo, 2006
Método de reducción en
fracciones parciales
•
RAICES COMPLEJAS CONJUGADAS:
-
Supongamos el denominador de 2º orden cuyas raíces son:
α
+jw
d- Los pasos a dar son los siguientes:
1. Obtener fracciones con un denominador de segundo grado (cuyas
raíces son
complejas conjugadas) y un numerador de primer grado.
2. Obtener los valores de A y B
3. Descomponer y trasformar la fracción en transformadas de Laplace
cuya
0 1
2
2
s
a
s
a
a
B
As
+
+
Método de reducción en
fracciones parciales
•
EJEMPLO 5:
-
Hallar la antitransformada de Laplace de la función:
SOLUCIÓN
Identificando coeficientes de potencias de s se obtienen A, B y
C:
)
5
2
(
3
)
(
2+
+
=
s
s
s
s
F
5
2
)
5
2
(
3
)
(
2 2+
+
+
+
=
+
+
=
s
s
C
s
B
s
A
s
s
s
s
F
5
6
5
3
5
3
5
3
2
0
0
−
=
−
=
=
=
+
=
+
=
C
B
A
A
C
A
Método de reducción en
fracciones parciales
•
EJEMPLO 5:
-
Poniendo las fracciones como transformadas de Laplace conocidas:
- Y la solución será:
+
+
−
+
+
+
−
=
+
+
+
−
=
2 2 2 2 22
)
1
(
2
2
1
2
)
1
(
1
1
5
3
5
2
2
1
5
3
)
(
s
s
s
s
s
s
s
s
s
F
−
−
=
e
−t
e
−t
t
f
t tsen
2
2
1
2
cos
1
Resolución de ecuaciones
diferenciales
Ejemplo:
d
t
d
t
d
t
=
u
.
u
d
L
y
y
d
y
d
L
0
t
para
e
)
t
(
u
;
t
d
)
(
y
d
;
)
(
y
u
.
t
d
u
d
y
t
d
y
d
t
d
y
d
t
−
=
+
+
≥
=
=
−
=
+
+
−5
0
2
0
0
0
0
5
0
2
2 2 2 2 2)
s
(
sU
)
s
(
Y
)
s
(
Y
)
s
(
Y
s
2+
2
s
+
=
−
U(0)-0.5U(s)
Y(s)(s
2+
2s
+
1)
=
(s
−
0.5)U(s)
−
1
2
s
1
U(s)
+
=
2)
1)(s
2s
(s
2.5
Y(s)
2+
+
+
−
=
[ ]
Y
(
s
)
L
)
t
(
y
=
−1=
2)
(s
1)
(s
2.5
Y(s)
2+
+
−
=
...
=
+
+
−
−2)
(s
1)
(s
2.5
L
1 2Descomposición en fracciones simples
( )
( )
2 2( )
22
)
2
s
(
1
s
)
2
s
(
c
)
2
s
(
)
1
s
(
)
2
s
)(
1
s
(
b
)
2
s
(
1
s
1
s
a
+
+
+
+
+
+
+
+
+
+
+
+
+
+
( )
21
s
c
1
s
b
2
s
a
+
+
+
( )
2 2t t t1
2
.
5
e
2
.
5
e
2
.
5
te
1
s
5
.
2
1
s
5
.
2
2
s
5
.
2
L
)
t
(
y
−
=
−
−+
−−
−
+
−
+
+
+
+
−
=
[ ]
1Y
(
s
)
L
)
t
(
y
=
−=
+
+
−
−2)
(s
1)
(s
2.5
L
1 2=
+
+
−
2)
(s
1)
(s
2.5
2=
+
+
−
2)
(s
1)
(s
2.5
20
b
a
+
=
0
c
b
2a
+
3
+
=
2.5
2c
2b
a
+
+
=
−
-2.5
PROPIEDADES DE LA T. LAPLACE TRANSFORMADAS MÁS COMUNES
Linealidad L
[
af(t)+bg(t)]
=aF(s)+bG(s) f(t) F(s)Impulso unitario 1
Diferenciación en el dominio del tiempo
dt df sf s F s dt t f d f s sF dt t df ) 0 ( ) 0 ( ) ( ) ( ) 0 ( ) ( ) ( 2 2 2 − − = − = L L ) 0 ( ... ) 0 ( ' ) 0 ( ) ( ) ( 1 0 2 1 − − − − − − − − = n n n n n n f s f s f s s F s dt t f d L 1 s 1
Integración en el
dominio del tiempo s
f s s F dt t f
t ( ) (0 )
) ( ) 1 ( 0 + − − =
∫
L
[
()]
( ) 1 ( )(0 )1 1 )
( − +
= −+
− = −
∑
n ii n i n n f s s s F t f
L tn
1 ! + n s n
Desplazamiento en el
tiempo L
[
f(t−d)]
=e−sdF(s) e−at s+a1
Teorema del valor
inicial limt→0f(t)=lims→∞sF(s) tne−at ( ) 1
!
+
+a n
s n
Teorema del valor final limt→∞f(t)=lims→0sF(s) Asenwt 2 2
w s w A + Teorema de
convolución () ( ) ( ) ( )
0 s G s F d t g t
f =
−
∫
∞ τ τL Acoswt 2 2
w s s A +
( )
[
f t/]
F( s) L α =α αTransformación de variables. Cambio de
escala
[
( )
]
( )
αα αt 1Fs/ f
L = α= constante positiva Ae−atsenwt (s a)2 w2
w A
+ +
Traslación en el campo complejo
Si L
[ ]
f1(t) =F(s) y L[
f2(t)]
=F(s±α) siendo α= constante, entonces(t) f e (t)
f t 1 2
α
m
= Ae−atcoswt (s a)2 w2
a s A + + +
Diferenciación en el
campo complejo
[ ]
dsdF(s) tf(t)